第6章 连续交通流模型
交通流动力学模型
max,2
(a)
max,2
(b)
max,2(2010)
2
2
max,1
2010
= > <
max,2(2010)
1
max,1
1
max,2
(c)
overtaking from right allowed
2
2,c
density inversion
1
max,1
交通流动力学理论
目录
• • • • • • • • • • • • 概述 交通流的基本概念 宏观交通流 混合交通流的宏观模型 跟车模型 两车道跟车模型 换道分析 超车模型 主要结论 存在的问题 发展趋势 研究心得
一、概述
• 研究内容 • 研究历史 • 现代交通流研究的分类 • 相关知识结构
研究内容(一)
将上述两式相加和相减,分别可得 ˆ ˆ
c 0 t x ˆ ˆ (1 ) ˆ) ( ˆ c (1 )a t x 其中 ˆ 1 ˆ 1 2 , 2 。
Laval-Daganzo模型(Transp. Res. B 40, 251(2006))
二、交通流的基本参数
• 流量:
• 速度:时间平均速度和空间平均速度 • 密度: • 车头间距和车头时距: • 占有率:空间占有率和时间占有率
车头时距统计分布模型
• • • • • • • 负指数分布 移位负指数分布 Erlang分布 移位Erlang分布 Gamma分布 对数正态分布 M3分布和其他组合型分布
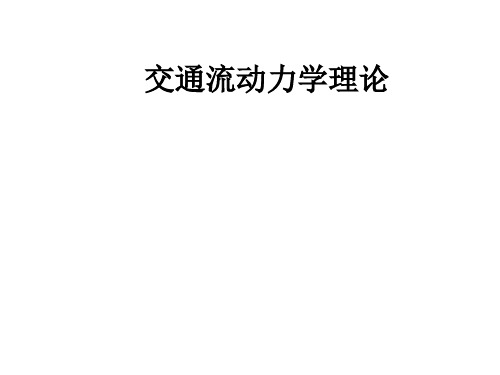
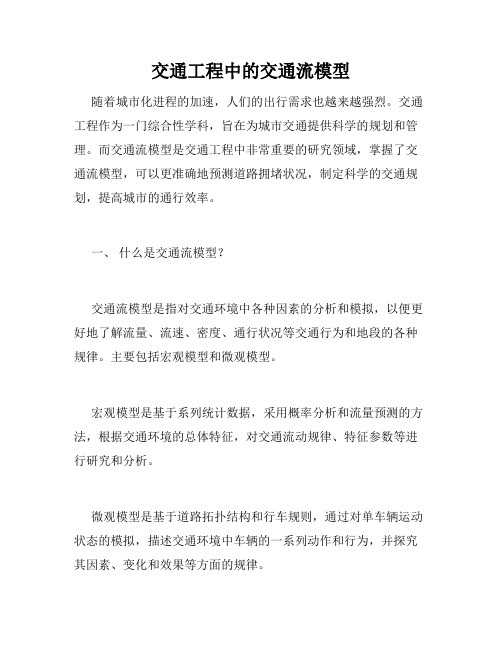
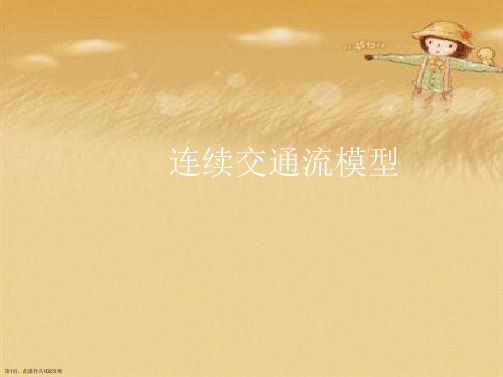
多车道高阶模型
• 两车道交通流动力学模型
两车道跟车示意图
模型与计算格式
从一个区域转移到另一个区域,将会出现相变
连续交通流模型
—
〉k
2 m
守恒方程的数值解——应用
• 多车道流体力学模型
q1 x
k1 t
g
Q1
q2 x
k2 t
Q2
q1 x
k1 t
g
Q1
q2 x
k2 t
Q2
k n1 1,m
1 2
(k1n,m1
kn 1,m1
)
t 2x
(q1n,m1
qn 1,m1
)
t 2
(
gn 1,m1
gn 1,m1
)
t 2
(Q1n,m1
k ( x, t )
守恒方程:
q k 0 x t q q(k)
假设路段上没有交通的产生或离去
k q t x
q dq k x dk x
(u k du ) k dk x
d (ku) k dk x
(u k du ) k dk x
k q t x
(u k du ) k dk x
K` 起动密度
交通波理论应用
• 交叉口车辆排队分析
1、孤立交叉口车辆运行状况的分析
U0 K0
停车波
红灯 tr
停车线, 位置X0
U0 K0
排队长度 uf1tr (1 k0 / k j)
停车波 U0 K0
起动波
红 绿灯 tcr-tr
u K1
停车线, 位置X0
排队车辆完全消散时间Td 排队车辆完全通过交叉口时间Ta
u2 u f (12 )
2
1
u2 uf
U2为刚起动时的车速,可忽略
基于对数模型 的交通波模型
u
um
ln
Kj K
波速: wAB
交通流理论排队论模型跟弛模型与交通波模型
2.说明:排队等待的车辆从一开始起动,就产生了起 动波,该波以接近 的v f 速度向后传播。
交通运输与物流学院
29
交通流中观测的加速度
把速度简单地看成密度的函数v(k),使得求解连续方程变得简单。 现实中交通流的平均速度v不可能瞬时地随密度发生变化,驾驶
员总是根据前方密度来调整车速
dv
k
dv
2
17
跟驰模型稳定性
多数个车辆在做跟驰运动时,一辆车状态的改变会导致其后续车 辆运行状态接二连三的改变,称为运行状态的传播
局部稳定 关注跟驰车对引导车运行波动的反应。如车头间距摆 动大则不稳定,摆动愈小则愈稳定
引导车向后面各车传播速度变化,如果速度振幅扩大,就是不稳 定,如果振幅衰减,就是渐近稳定
C T
Reuschel, Pipes
跟驰车辆的加速度与 两车速度差成比例
Chandler, Herman, Kometani and Sasaki
Gazis, Herman (跟驰模型一般形式)
m, l 的不同取值对应着不同的密度-速度关系模型
m=0, l=2, Greenshield; m=0, l=1, Grenberg 交通运输与物流学院
交通运输与物流学院
32
密度波模型
在交通流中存在密度不连续 的地方,密度在该处的移动
速度是C。单位时间内通过
断面A、B车辆数的差等于 断面内滞留的车辆数。
波阵面
(q q) q C(k k k)
C q k
C dq dk
交通运输与物流学院
33
密度波传播分析1
密度波描述了两种交通状态的转化过程,C代表转化的方向与进程
解这是一个M/M/1排队系统
江苏省考研交通工程复习资料交通流理论重要模型分析
江苏省考研交通工程复习资料交通流理论重要模型分析交通工程是一个与人们生活息息相关的学科领域。
在交通规划、交通流量管理以及交通安全等方面,交通工程师需要掌握交通流理论以便进行准确的分析和预测。
本文将对江苏省考研交通工程复习资料中的交通流理论重要模型进行分析,并探讨其应用。
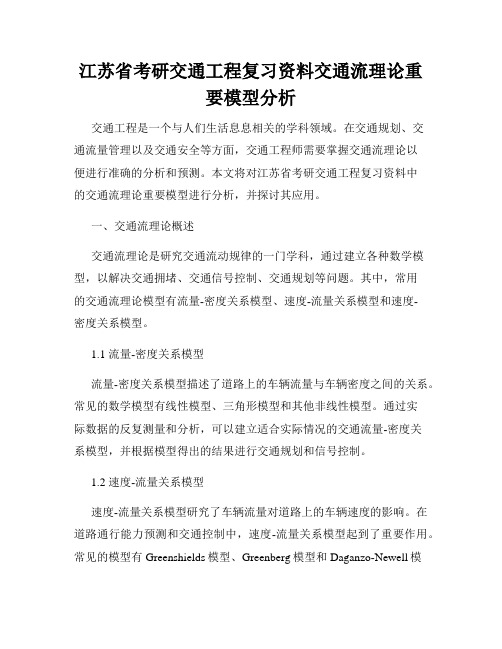
一、交通流理论概述交通流理论是研究交通流动规律的一门学科,通过建立各种数学模型,以解决交通拥堵、交通信号控制、交通规划等问题。
其中,常用的交通流理论模型有流量-密度关系模型、速度-流量关系模型和速度-密度关系模型。
1.1 流量-密度关系模型流量-密度关系模型描述了道路上的车辆流量与车辆密度之间的关系。
常见的数学模型有线性模型、三角形模型和其他非线性模型。
通过实际数据的反复测量和分析,可以建立适合实际情况的交通流量-密度关系模型,并根据模型得出的结果进行交通规划和信号控制。
1.2 速度-流量关系模型速度-流量关系模型研究了车辆流量对道路上的车辆速度的影响。
在道路通行能力预测和交通控制中,速度-流量关系模型起到了重要作用。
常见的模型有Greenshields模型、Greenberg模型和Daganzo-Newell模型等。
这些模型可以帮助交通工程师对道路拥堵情况进行评估,并提出相应的交通管理措施。
1.3 速度-密度关系模型速度-密度关系模型研究了道路上的车辆密度对车辆速度的影响。
一般情况下,车辆密度越大,车辆速度越低。
常用的模型有Greenberg模型、Daganzo-Newell模型和Underwood模型等。
通过建立速度-密度关系模型,交通工程师可以预测并规划道路的通行能力,以减少交通拥堵。
二、交通流理论重要模型分析在江苏省考研交通工程复习资料中,有几个重要的交通流理论模型值得特别关注。
2.1 Greenshields模型Greenshields模型是速度-流量关系模型中的经典模型之一。
它假设车辆在道路上的速度与车流量呈负线性关系。
交通工程中的交通流模型
交通工程中的交通流模型随着城市化进程的加速,人们的出行需求也越来越强烈。
交通工程作为一门综合性学科,旨在为城市交通提供科学的规划和管理。
而交通流模型是交通工程中非常重要的研究领域,掌握了交通流模型,可以更准确地预测道路拥堵状况,制定科学的交通规划,提高城市的通行效率。
一、什么是交通流模型?交通流模型是指对交通环境中各种因素的分析和模拟,以便更好地了解流量、流速、密度、通行状况等交通行为和地段的各种规律。
主要包括宏观模型和微观模型。
宏观模型是基于系列统计数据,采用概率分析和流量预测的方法,根据交通环境的总体特征,对交通流动规律、特征参数等进行研究和分析。
微观模型是基于道路拓扑结构和行车规则,通过对单车辆运动状态的模拟,描述交通环境中车辆的一系列动作和行为,并探究其因素、变化和效果等方面的规律。
二、交通流模型的应用交通流模型的应用十分广泛。
应用交通流模型,可以确认拥挤路段及其所引起的拥堵原因,预测交通环境中的流量、速度、密度和通行能力,评估道路改善项目等。
在城市交通规划和设计中,交通流模型是一种非常有效的工具,可协助规划者制定科学的规划和解决实际问题。
三、常用交通流模型常用的交通流模型主要包括饱和流模型、排队模型、微观交通流模型等。
1.饱和流模型饱和流模型是交通流模型中常用的一种,它是即时流量和容量的比值。
在道路饱和时,路段上的车辆数已经超过了它所能承载的容量,此时路段的通行能力和效率就会降低。
因此,在交通规划中,饱和流模型可以用来了解道路瓶颈、道路吞吐量和等待时间等因素。
2.排队模型排队模型通常用于衡量交通拥堵状况,这类模型假设车辆以一定的速度前行,当前方存在车辆时,车辆必须改变速度或停下,引发拥堵。
排队模型可以表达车辆之间相互作用关系,以及车辆的移动效率等。
3.微观交通流模型微观交通流模型主要研究单个车辆行驶的动态特性,包括车辆行驶速度、车道变换、加速和减速规律、路线选择等行为。
与宏观模型不同,微观模型更进一步地分析交通流,能够更准确地反映实际交通状况。
连续交通流模型及数值模拟
连续交通流模型及数值模拟[摘要]本文对现有的交通流宏观模型进行了研究,总结了各种模型的思想、优缺点以及适用条件,在此基础上,选取了Payne 模型离散格式进行数值模拟,选取了某段高速公路的交通流作为模拟对象,展现了Payne 模型模拟交通流的可行性。
[关键字] 连续交通流;离散格式;数值模拟0 引言交通流理论研究加深了人们对复杂多体系统远离平衡态时演变规律的认识,促进了统计物理、非线性动力学、应用数学、流体力学、交通工程学等学科的交叉和发展等多学科的交叉渗透和相互发展。
交通流理论研究的对象是离散态物质,是一个复杂的非线性体系,对这类物质运动规律的描述,尚无成熟的理论。
在宏观的连续流模型中,交通流被比拟为连续的流体介质,即将流量、速度和密度等集聚变量视为时间和空间的连续函数。
模型包含时间和空间的状态方程,考虑了车辆的加速度、惯性和可压缩性,能够合理准确描述交通流的动态特性,相比微观模型有更大的优势。
连续流交通流模型通常用密度(k )、速度(u )、流量(q )三个变量来描述[1]。
1 连续交通流模型1.1 LWR 模型1955年,Lighthill&Whitham 提出了第一个交通流的流体力学模型——流体运动学模型[2],随后P.I.Richards 独立地提出了类似的交通流理论。
LWR 模型用k(x,t)和u(x,t)表示t 时刻位于x 处的交通流密度和平均速度,他们满足流体力学的连续方程:(),k q g x t t x∂∂+=∂∂ (1-1) 此方程反映了车辆数守恒,其中g(x,t)是流量产生率,对没有进出匝道的公路,g(x,t)=0, 对进口匝道,g(x,t)>0,对出口匝道,g(x,t)=0。
k 为交通密度,也称为交通流量;x ,t 分别为空间测度和时间测度。
设u 为空间平均速度,则存在以下关系:q k u =⋅ (1-2)对于平均速度u(x,t),假设平衡速度——密度关系:()(,)(,)e u x t u k x t = (1-3)以上3个方程构成了完整的一阶连续交通流模型,LWR 模型的优点是简单明了,可以采用流体力学和应用数学中的成熟工具进行分析,而且可以描述诸如交通阻塞形成和消散之类的交通现象,但是,由于该模型的速度是由平衡速度密度关系决定,并且没有考虑加速度和惯性影响,因此不适用于描述本质上处于非平衡态的交通现象,例如车辆上、下匝道的交通、“幽灵式”交通阻塞、交通迟滞、时走时停的交通等。
交通流模型及其应用研究

交通流模型及其应用研究交通是现代社会的重要组成部分,它关系到人们的出行、货物的运输以及城市的发展。
而交通流模型作为研究交通现象和规律的重要工具,对于优化交通管理、提高交通效率、保障交通安全具有重要意义。
交通流模型的类型多种多样,每种模型都有其特点和适用范围。
其中,宏观交通流模型主要从整体上描述交通流的特性,例如流量、速度和密度之间的关系。
常见的宏观模型有 LighthillWhithamRichards (LWR)模型,它基于流体动力学的原理,将交通流类比为流体的流动。
这种模型对于研究大规模交通网络的整体性能较为有效,能够帮助交通规划者了解整个区域的交通流量分布和变化趋势。
微观交通流模型则更加关注单个车辆的行为和相互作用。
比如,元胞自动机模型将道路划分为一个个小单元格,车辆在单元格中根据特定的规则移动。
这种模型能够较为直观地模拟车辆的加减速、换道等行为,对于分析局部交通现象,如路口的交通冲突、拥堵的形成和消散等具有很大的帮助。
还有一种中观交通流模型,它介于宏观和微观之间,既能反映交通流的总体特征,又能一定程度上考虑车辆的个体差异。
交通流模型在实际应用中发挥着重要作用。
在交通规划方面,通过建立交通流模型,可以预测未来交通需求的增长趋势,从而合理规划道路网络的布局和建设。
例如,在新城区的开发中,可以利用模型评估不同道路设计方案下的交通运行状况,选择最优的方案,以避免出现交通拥堵等问题。
在交通管理中,交通流模型可以为信号灯控制提供依据。
根据实时的交通流量和速度数据,结合模型的预测结果,动态调整信号灯的时长,优化路口的通行能力,减少车辆的等待时间和排队长度。
在智能交通系统(ITS)中,交通流模型也是不可或缺的一部分。
例如,在交通诱导系统中,模型可以预测不同路径上的交通状况,为出行者提供最优的出行路线建议,从而实现交通流在道路网络中的合理分配。
此外,交通流模型对于交通安全的研究也具有重要意义。
通过分析交通流的变化规律,可以识别出容易发生事故的路段和时段,从而采取相应的措施,如增设警示标志、加强巡逻等,降低事故发生的概率。
交通流理论课件11(二)

交通流理论(traffic flow theory)
线性跟驰模型稳定性分析
稳定性分析
在车辆间进行跟踪行驶时,如果其中某辆车产 生了不规则运动,其扰乱波将依次向后方传播。 在跟驰理论中,研究在产生扰乱波时的交通流
的稳定性称为稳定性分析。
两类稳定性
局部稳定性(Local Stability ):关注跟驰车辆 对它前面车辆运行波动的反应,即关注车辆 间配合的局部行为。 渐进稳定性(Asymptotic Stability) :关注车队 中每一辆车的波动性在车队中的表现,即车 队的整体波动性。
交通流理论(traffic flow theory)
课后作业
2.下面是某时段内交通流一组对应速度和密度 观测数据:(50,22)(45,25)(35,35) (30,50)(28,55)(25,60)(20,75)(16,80)(10,100),(单 位分别为km/h和veh/km)用最小二乘法拟和 求解:在线性跟驰模型条件下的反应强度系数 和车头间距倒数非线性跟驰模型条件下最大和 最小反应强度各是多少?在保证稳态条件下的 最大反应时间为多少?并分别求解两种条件下 的阻塞密度。
1)在一定的条件下可解 析连续方程
u u f (1 k / k j )
2)总体思路是消元降次 3)若有密度和速度关系,
df u f
可分别研究速度或者密 度的时空特性。
dk k j
4)在3)前提下,如果掌 握密度在道路上分布,
[u f
2u f
k k ]
k j x
k t
0
就可以研究其时变特性, 反之可研究其空间分布 特性;速度同理。
..
xn1(t T ) u
第六讲 交通流体理论
交通流回波现象
7
2、集散波的定义
列队行驶的车辆在信号灯交叉口遇到红灯后, 即陆续停车排队而集结成密度高的队列;绿灯启 亮后,排队的车辆又陆续起动而疏散成一列具有 适当密度的车队。
车流中密度经过了由低到高,再由高到低两 个过程,车流中两种不同密度部分的分界面经过 一辆辆车向车队后部传播的现象,称为车流的波 动。车流波动沿道路移动的速度,称为波速。
2
物理特性 连续体 离散元素
变量
动量 状态方程 连续性方程
运动方程
交通流与流体流的比拟
流体动力学系统
交通流系统
单向不可压缩流体 单车道不可压缩车流
分子
车辆
质量m 速度v 压力p
密度k 速度u 流量q
mv
ku
P=cmt
m (mv) 0 t x dv c2 m 0 dt m x
q=ku
k (ku) 0 t x
或 qk22
q1 k1
0 0
qk22
q1 k1
0 0
前一种情况交通流从高流量、低密度、较高速度
进入低流量、高密度、较低速度状态。由于此时
交通波向后运动,所以上游交通流状态将受到影
响而变差。
后一种情况交通流从高密度、低流量、低速度状 态进入到低密度、高流量、高速度状态。由于交 通波向后运动,将对上游交通状况有所改善,如 前方阻碍解除时会出现这种状况。
[q (q q)]t [k (k k)]x
或: k q 0
t x
取极限可得: k q 0 t x
又: q ku
故:
k (ku) 0 t x
上式表明,当车流量随距离而降低时,车流密度则随 时间而增大。
5
如果路段上有交通的产生或离去,那么守 恒方程采用如下更一般的形式:
第一部分 交通流理论-2

∆k ⋅ ∆X = − ∆N
∆q ⋅ ∆t = ∆N
∆k ⋅ ∆X = − ∆q ⋅ ∆t
∆q ∆k + =0 ∆X ∆t
∂q ∂k + =0 ∂X ∂t
流量守恒方程
∂q ∂k + =0 ∂X ∂t
流量守恒方程的求解
流量守恒方程将互相作用的交通参数密度、 流量守恒方程将互相作用的交通参数密度、速度以 及相互独立的变量时间、 及相互独立的变量时间、距离联系了起来 一般情况下无法求解 增加假设条件
第一节
基础理论
一、可插间隙理论 二、车头时距分布
可插间隙理论
基本定义
临界间隙tc:驾驶员能够接受的最小间隙 临界间隙的前提:保证安全
只有主路车流的 车辆间隙至少达 到tc,次路车辆 才能进入交叉口
tc
基本定义
跟随时间tf:当主路车辆之间出现一个较长的 间隙时,次路可以有多辆车进入交叉口,这时 次路车辆的车头时距
密度k2 平均速度U2
A
S
B
低密度、低流量、 低密度、低流量、高速度
高密度、高流量、 高密度、高流量、低速度
密度k1 平均速度U1
q2 − q1 < 0 k 2 − k1 < 0
密度k2 平均速度U2
高密度、高流量、 高密度、高流量、低速度
低密度、低流量、 低密度、低流量、高速度
q2 − q1 US = k 2 − k1
排队消散时间为 (q1 − q2 ) ×1.69 541 t1 = = = 0.28h q2 − q3 1924
阻塞时间=0.28+1.69=1.97h 阻塞时间=0.28+1.69=1.97h第六章 无信号交叉口理论
交通流理论第六章

第六章宏观交通流模型在城市快速发展而使交通变得拥挤的时候,城区的可达性便成为评价城市生活质量的重要方面,而交通拥挤确实已经成为当今各大城市的难题。
为解决这一问题,人们采用了各种工程和技术手段,小到路口渠化、信号配时,大到道路网规划、智能运输系统,应该说各项技术均已经达到了有效、适用的地步。
最近30年来,人们对应用这些技术形成的交通设施的效果进行了很多研究,并形成了对各单项设施评价的理论和方法,如干道通行能力和效果的评价,交叉口控制效果的评价等。
但是如何对一个道路网络的交通效果进行评价更是人们所关心的问题,尤其是ITS快速发展的今天,有一个基于路网的交通流优化和评价模型体系,就显得更为重要了。
本章从宏观的角度介绍一些流量、速度和密集度的量测和推算方法,从而提供网络交通效果评价的基本理论和基本方法。
这些方法可用于:1)同一城市不同时期的交通效果对比分析;2)不同城市同一时期的交通效果对比分析;3)路网交通设施设计评价。
第一节以CBD为中心的交通特性这一节中重点研究不同位置的交通状况与所处城区地理位置之间的关系。
图6—1 交通强度与距市中心距离的关系一、交通强度交通强度是指单位面积上单位时间内通过的所有车辆(折合成标准车辆)的行驶距离总和。
一般认为CBD(the central business district,商业中心区)是一个城市交通最为敏感的地区,交通强度与距CBD的距离有关。
于是,研究者建立了多种以距CBD的距离为自变量的评价交通特性的模型。
图6—1是对英国4个城市的研究结果,图中交通强度的单位是103pcu/h/km 。
图形符合指数模型,其模型如下:()a r A I /ex p -= (6—1)式中: A 、a —— 待定参数;I —— 交通强度(pcu/h/km ); r —— 距CBD 的距离(km )。
式中的参数A 、a 在高峰时段和非高峰时段的标定值是不同的。
此式表明,离CBD 越远,交通强度就越小。
数学模型在交通流量控制中的应用

数学模型在交通流量控制中的应用在现代社会中,交通拥堵问题不容忽视。
为了解决交通流量控制的挑战,数学模型被广泛应用于交通规划和管理中。
本文将探讨数学模型在交通流量控制中的应用以及其带来的重要影响。
一、交通流量模型交通流量模型是使用数学方法描述和分析交通流动的模型。
其中最常用的模型之一是Lighthill-Whitham-Richards (LWR) 模型。
该模型假设交通流是连续的,基于守恒定律和宏观理论。
LWR模型通过偏微分方程描述交通流的变化,能够准确预测交通流量的动态变化和拥堵情况。
此外,还有一些基于离散事件的交通流模型,如Cellular Automaton(CA)模型和Agent-Based模型,它们更加适用于描述个体车辆的行为和交互。
二、交通信号优化数学模型在交通信号优化中有着广泛的应用。
通过采集实时交通数据,结合交通流量模型,可以建立交通信号优化的数学模型。
这些模型可以预测交通信号的优化策略,以最大程度地提高道路的通行能力和交通流的顺畅度。
例如,Green Wave模型通过计算车辆的速度和距离,从而确定最佳的绿灯时长和相位差,使得车辆在连续的绿灯波浪中保持理想的速度。
三、交通拥堵预测数学模型还可以用于交通拥堵的预测。
基于历史交通数据和实时数据的分析,可以建立拥堵预测模型。
这些模型利用数学方法和算法,预测未来的交通拥堵情况,并提供实时的路况信息。
拥堵预测模型可以帮助交通管理部门制定相应的措施,减少交通拥堵,提升交通效率。
例如,基于时间序列分析的模型可以根据历史数据和周期性变化,预测未来某个时间段的交通流量和拥堵情况。
四、智能交通系统数学模型在智能交通系统中起着重要的作用。
智能交通系统利用传感器和通信技术,收集和处理交通信息,从而提高道路的安全性和效率。
数学模型可以用于交通信息的分析和预测,以及交通策略的制定。
例如,基于机器学习的交通流预测模型可以根据历史数据和实时数据,预测未来交通流量的情况,从而帮助交通管理人员调整交通信号和改变交通路径,减少交通拥堵。
连续交通流模型课件

随着传感器技术和数据处理技术的发展,未来连续交通流模型将更加注重高维度数据的采集和处理。例如,通过 利用车辆轨迹数据、速度数据、加速度数据等多维度信息,建立高维度的连续交通流模型,以提高模型的预测能 力和精度。
连续交通流模型的未来研究方向与展望
强化学习与优化算法
未来连续交通流模型将更加注重与强化学习、优化算法等人工智能技术的结合。通过利用这些技术, 能够实现对交通流的实时监测和优化控制,进一步提高交通流的运行效率和安全性。
连续交通流模型的未来研究方向与展望
多模式交通流
未来研究将进一步拓展连续交通流模型在多模式交通流中的应用。多模式交通流包括不同类型车辆、不同速度、 不同行驶规则的交通流,如自动驾驶车辆、电动车、自行车等。研究如何将这些不同的交通流模式纳入连续交通 流模型中,并提高模型的预测精度将是未来的一个研究方向。
稳定性与收敛性
需要注意数值解法的稳定性和收敛性,以确保计 算结果的准确性和可靠性。
广义交通流模型的参数分析
参数物理意义
01
广义交通流模型中的参数具有明确的物理意义,如阻尼系数、
松弛时间等。
参数对交通流的影响
02
这些参数对交通流特性的影响可以通过模型进行分析和预测。
参数估计与标定
03
实际应用中,需要对模型参数进行估计和标定,以使模型更好
地拟合实际交通流数据。
05
连续交通流模型的优化 与改进建议
改进粒子群优化算法
粒子群优化算法是一种基于群体智能的优化算法,通过模拟鸟群、鱼群 等生物群体的社会行为来寻找最优解。在连续交通流模型中,可以改进 粒子群优化算法,使其更好地搜索全局最优解。
采用动态调整惯性权重:惯性权重是粒子群优化算法中的一个重要参数 ,它可以影响算法的全局搜索和局部搜索能力。通过动态调整惯性权重
交通工程学第六讲交通流理论概率统计模型
➢ 适用条件
韦布尔分布适用 范围较广,交通流 中的车头时距分布 、速度分布等一般 都可用韦布尔分布 。
41
5.2 统计分布特征
4.连续型分布
负指数分布
位移负指数分布
韦布尔分布
爱尔朗分布
42
在本例中Q=60,Z=5000/500=10 所以:
18
例题
1.有4辆车的概率: 2.有大于4辆车的概率:
=1-0.0025-0.0150-0.0450-0.0900-0.1350 =0.7125
19
例题
例 某信号交叉口的周期为c=97s,有效绿灯时间为g=44s。
有效绿灯时间内排队的车流以v=900辆/h的流率通过交
从介质的均匀性来看
匀质模型(Homogeneous) 异质模型(Inhomogeneous)
从介质的连续离散性来看
连续流模型(Continuum) 离散流模型(Discrete) Car-following
Cellular automation
5
主要内容
• 交通流理论概述 • 交通流的统计分布特性 • 排队论的应用 • 跟驰理论 • 流体力学模拟理论 • 可插车间隙理论
37
泊松分布与指数分布的关系
38
5.2 统计分布特征
4.连续型分布
负指数分布
位移负指数分布韦布尔分布 Nhomakorabea爱尔朗分布
39
5.2 统计分布特征
4.连续型分布—韦布尔分布
➢ 基本公式
式中:β、γ、α为分布参数,取正值,且β > γ
➢概率密度函数
40
5.2 统计分布特征
4.连续型分布—韦布尔分布
韦布尔分布概率密度曲线
交通运输中的交通流理论与模型

交通运输中的交通流理论与模型第一章交通流理论的基本原理交通流理论是交通运输学中的一个重要分支,研究交通流的运行规律与特性,为交通规划和交通管理等提供决策支持。
本章将介绍交通流理论的基本原理,包括交通流类型、交通流参数和交通流模型等。
1.1 交通流的类型交通流通常分为三种类型:车辆交通流、行人交通流和混合交通流。
车辆交通流是指由车辆组成的流动车辆群体;行人交通流是指由行人组成的行人群体;混合交通流则是车辆交通流和行人交通流混合在一起。
1.2 交通流的参数交通流的参数是描述交通流特性的量化指标,常用的参数包括车辆密度、车速和交通流量等。
车辆密度是指单位长度道路上的车辆数;车速是车辆通过单位时间所走过的距离;交通流量是单位时间内通过某一路段的车辆数量。
1.3 交通流模型交通流模型是用来描述交通流特性与变化规律的数学模型。
常用的交通流模型有宏观模型和微观模型两种。
宏观模型研究交通流整体运行规律,如流动稳定性和拥堵解除等;微观模型则从个体车辆的角度考虑交通流的行为规律,如车辆加速度和避让等。
第二章常见的交通流模型本章将详细介绍一些常见的交通流模型,包括流量-密度关系模型、速度-密度关系模型和流量-速度关系模型等。
2.1 流量-密度关系模型流量-密度关系模型研究交通流量与交通流密度之间的关系。
常用的模型包括线性模型、理想模型和反S模型等。
线性模型假设交通流量与交通流密度成正比例关系;理想模型采用抛物线函数来描述交通流量与交通流密度之间的关系;反S模型则将交通流量与交通流密度联系起来,并引入饱和流量的概念。
2.2 速度-密度关系模型速度-密度关系模型研究交通流速度与交通流密度之间的关系。
常用的模型包括线性模型、理想模型和广义的Shriver模型等。
线性模型假设交通流速度与交通流密度成正比例关系;理想模型采用抛物线函数来描述交通流速度与交通流密度之间的关系;广义的Shriver模型则考虑了车辆间距和车辆长度等因素的影响。
连续交通流模型
➢
5.3.1 交通流的变化
➢
5.3.2 速度分布的计算
➢
5.3.3 加速度干扰
➢
5.3.4 微观时间间隔分布和宏观交通流量分布
第3页,此课件共102页哦
5.1 简单连续流模型
如果从一架飞机上看某条高速公路,我们会很自然的把 来来往往的车流想象成河流或某种连续的流体。正是由于这 种相似性,经常使用流量、密度、速度等流体力学术语来描 述交通流特性。
➢
5.2.2 瞬态和停车—起动波
➢
5.2.3 动量方程
第2页,此课件共102页哦
➢
5.2.4 粘滞模型
➢
5.2.5 高阶模型的稳定性分析
➢
5.2.6 利用有限元的数学解法
➢
5.2.7 实际例子中参数的标定
➢
5.2.8 瓶颈处交通流的计算
➢
5.2.9 密度与松弛时间和期望系数
➢ 5.3 随机性连续波动模型
g(x,t) 0
或
k u k k fk k fk k k (d f 5 .4k ) k 0
x t x t x d k x t
fkkd dkf kxkt 0
第10页,此课件共102页哦
f k 可以是任意的函数,不需要为了使结果通用作特定的假设。
采用格林希尔治(Greenshields)提出的速度—密度线性模型,
式中:
L1' L1 b
(5.23)
因此公式(5.23)可以b 推k 广a u 到fc/ 任k j何 周 k 期ju Nfg ,/4 形k 式j 为k a :
。 式中 和 是指周期N和N+1开L始N1时的L排N 队b长度 显然,如果
或
L N ,L N即 1
连续交通流模型的建模与研究_肖世发
收稿日期:2006-08-20基金项目:湛江师范学院科研基金资助项目(L0408).作者简介:肖世发(1975-),男,贵州毕节人,湛江师范学院讲师,硕士,从事理论物理研究. 2006年12月第27卷第6期湛江师范学院学报JOUR NAL OF ZHANJIANG NORMAL COLLE GE Dec .,2006Vol .27 No .6连续交通流模型的建模与研究肖世发,梁南福(湛江师范学院物理科学与技术学院,广东湛江524048) 摘 要:在元胞自动机交通流FI 模型的基础上,将离散决定性FI 模型改进为连续的决定性FI 模型,探讨了连续模型的流量及其不稳定行为.为了接近实际交通,在连续决定性FI 模型的基础上研究了随机刹车对交通流的影响.研究发现,不管在决定性模型还是考虑随机刹车的模型,都能描绘实际交通流行为中的亚稳态行为.这从理论上解释了实际交通流中的亚稳态现象是由于车辆在一定密度区域分布不均匀的结果.关键词:交通流;元胞自动机;交通模型;FI 模型;连续模型;亚稳态中图分类号:O414 文献标识码:A 文章编号:1006-4702(2006)06-0031-060 引言由于交通运输问题在国民经济建设中的重要性,以及城市的发展和环境建设与良好的交通管理密不可分,交通研究一直受到各国政府的重视.交通流系统本身是一个复杂系统,在众多行驶车辆之间的自组织相互作用下,它表现出车流的自组织临界性和阻塞相变等渐近行为.在各种交通流模型中,元胞自动机交通流模型(简称C A 模型)可以很好地模拟真实的交通流行为,它既具有修改灵活、便于在计算机上操作的好处,又能捕获交通流这一复杂系统的自组织临界性特征,因而目前已成为模拟交通流和研究交通问题的一种重要方法[1-3].元胞自动机交通流模型是一种将时间、空间以及车辆速度离散化的离散模型.首先将道路分成N 个格点,车辆某一时步只能在这些格点上.其次是速度离散化,将车辆的速度离散为只取0,1,2,3…V max 等V max +1个值,其中V max 是最大速度,如在高速公路,V max 取“5”,对应实际车辆速度135km h .每一时步,每辆车按照一定的规则向前运行.NS 模型与FI 模型就是元胞自动机交通流模型中两个最重要的模型:Nagel 和Schreckenberg 在184号[2]交通流模型的基础上,引入一个随机减速概率P 提出的一种新的交通流CA 模型(简称为NS 模型).每辆车以下面4个步骤进行速度更新和位置更新[4]:1)加速过程v i (t +1 3)=min (v i (t )+1,V max )2)减速过程v i (t +2 3)=min (v i (t +1 3),gap i (t ))3)以概率p 随机减速v i (t +1)=max (v i (t +2 3)-1,0)4)位置更新x i (t +1)=x i (t )+v i (t +1)这里的x i (t )表示第i 辆车在t 时步的位置,v i (t )表示第i 辆车在t 时步的速度,V max 表示车辆最大速度;gap i(t)表示第i辆车在t时步与前方紧邻车辆的间距.FI模型是日本学者Fukui和Ishibashi在1996年提出了一个新的一维元胞自动机交通流模型[5]的简称. FI模型的车辆运行规则如下:1)加速过程 v i(t+12)=min(gap i(t),v max)2)随机减速过程 v1(t+1)=v i(t+12)-1 (v i=V max and with p)υ1(t+1)=υi(t+12) (v i=V max and with1-p)3)位置更新x i(t+1)=x i(t)+v i(t+1)NS模型是一种逐步加速的交通流模型,而FI模型是一次性加速模型.这两种模型都能很好的反映实际交通流中的交通行为,并且在此基础上发展了较多的改进模型[1,6].这两种模型及其改进模型都能很好的模拟实际交通流中的各种现象以及交通流量与交通密度之间的解析关系,但是很难从理论上得到交通流量与交通密度之间的解析关系.所以我们在FI模型的基础上将离散的FI模型改进为连续的FI模型,以期从理论上得到交通流量与交通密度之间的解析关系.本文第2部分将离散的决定性FI模型改进为连续的决定性FI 模型,探讨了连续模型的流量及其不稳定行为;第3部分进一步考虑随机刹车情况下的交通流行为.第4部分为本文的结论.1 连续决定性FI模型研究1.1 建立模型交通流元胞自动机模型中的FI模型中,当刹车概率为零时我们称其为决定性FI模型,我们将其中的物理量取连续值,取每辆车的速度更新规则是:v i(t)=Δx i (Δx i≤V max)V max (Δx i>V max)(1.1.1)其中Δx i是第i辆车前方车距,V max是车的最大速度,是连续值.v i与Δx i的函数如图1.其位置更新规则与离散FI模型相同.图1 车速与前方车距之间的关系图1.2 流量计算考虑一维交通流车道长度为L,每辆车的长度为d,车道上分布着N辆车,则L,d,N满足关系:∑Ni=1Δx i=L-Nd(1.2.1)定义车辆密度:ρ=NdL(1.2.2)表示单位车道长度上的平均车辆长度.由车辆的速度更新规则(1.1.1)式,引进参数k(0≤k≤1),kN表示车距间距Δx i≤V max的车辆数,我们可计算车辆运行的平均速度:32湛江师范学院学报(自然科学)第27卷v —=1N [∑kN i =1Δx i +∑(1-k )N i =1V max ](1.2.3)系统的交通流量定义为: J =ρv —d (1.2.4)表示单位时间内通过某点的车辆数.现在讨论车辆的平均速度及流量.1.2.1 平衡态交通流量当系统处于平衡态时,我们假定车辆均匀分布.所以每辆车的前方车距为车辆间距的平均值:Δx i =1N [∑Ni =1Δx i ]=Δx i (1.2.5)则车辆平均速度(1.2.3)式可表示为:v —=1N [∑mNi =1Δx i +∑(1-m )N i =1V max ](1.2.6)其中m 在Δx i ≤V max 时取值为“1”,在Δx i >V max 时取值为“0”.由(1.2.1)~(1.2.4)式,可得到汽车的流量为:J =m (1-ρ)+V max (1-m )ρd(1.2.7)由(1.2.1),(1.2.2),式得:当ρ≤d V max +d 时,m =0,当ρ>d V max +d 时,m =1,即交通流在ρ=d V max+d 时发生相变.取d =7.5m ,V max ={d ,2d ,3d ,4d ,5d }={7.5,15,22.5,30,37.5}时临界密度为:ρ0=d V max +d ={1 2,1 3,1 4,1 5,1 6}(1.2.8)当ρ>ρ0时,m =1,当ρ≤ρ0时,m =0.图2是不同最大速度时的流量—密度关系图.解析结果与离散FI 模型模拟结果完全一致.图2 不同最大速度的流量密度图,从上而下V ma x 分别为{37.5,30,22.5,15,7.5}1.2.2 非平衡态交通流量为简单起见,我们假定非平衡交通是平衡交通受到某种扰动引起偏离平衡态的一种交通状态.引进两个量辅助参量θ(0≤θ≤1 2)和ε(0≤ε≤1)来描述车辆分布的不均匀性,θ表示系统中车辆间距偏离Δx i —的车辆的比率,ε表示偏离量,由此可将系统中的车辆按车间距分为3类:1)第1类:车间距仍为Δx i —而不发生偏离的车,设第1类车辆的总数设为N (1-2θ)辆.引入参数m ,当Δx i —<V max 时,m =1;否则m =0.2)第2类:车间距偏离Δx i —变为Δx i —-εΔx i —的车辆,设有N θ辆,引入参数l ,当Δx i —-εΔx i —<V max 时,l =1;否则l =0;33第6期肖世发等:连续交通流模型的建模与研究图3 V m ax =2时不同分布状态的流量,从上而下分别对应均匀交通,θ=13,ε=13;θ=13,ε=12;θ=12,ε=12 图4 不同最大速度时交通流量从上而下V max ={37.5,30,22.5,15,7.5}3)第3类:车间距偏离Δx i —变为Δx i —+εΔx i —的车辆,考虑系统总的空位守恒,第3类车的总数应为N θ辆,引入参数n ,当Δx i —+εΔx i —<V max 时,n =1;否则n =0;此时系统的平均速度为:v —=Δx i —[m (1-2θ)+l θ(1-ε)+n θ(1+ε)]+[1-m (1-2θ)-l θ-n θ]V max (1.2.9)流量为:J =(1-ρ)[m (1-2θ)+l θ(1-ε)+n θ(1+ε)]+ρd [1-m (1-2θ)-l θ-n θ]V max (1.2.10)图3是V max =2,均匀交通,θ=13,ε=13;θ=13,ε=12;θ=12,ε=12情况下的图像和平衡态交通的比较.从图中可看到,只是在一定密度区域,系统的不均匀性对交通流量的影响较大.2 随机刹车概率对流量的影响在连续决定性FI 模型基础上,考虑随机刹车概率,每辆车的速度更新规则为:v i (t )=Δx i (Δx i <V max )V max -d (Δx i ≥V max )(with V p )V max (Δx i ≥V max )(with 1-p )(2.1.1)其中Δx i ,V max 分别代表第i 辆车前方的车距和最大速度,都取连续值.2.1 流量计算根据第2部分的定义可得车辆运行的平均速度: v =1N [∑kNi =1Δx i +∑(1-k )N (1-p )i =1V max +∑(1-k )Npi =1(V max -d )](2.1.2)现在讨论车辆的平均速度及流量.图5 最大速度为“2”时刹车概率对流量的影响,从上而下对应P ={0,0.2,0.4,0.6,0.8,1.0} 图6 最大速度为“2”,非均匀参数θ=13,ε=13时,刹车概率分别为0,0.2,0.4,0.6,0.8,1.0的流量图34湛江师范学院学报(自然科学)第27卷2.1.1 车辆均匀分布的情况因为车辆均匀分布,所以每车辆的前方车距为:Δx i =1N [∑Ni =1Δx i ]=Δx i —(2.1.3)由(2.1.2)可得系统平均速度为:v =1N [∑mNi =1Δx i +(1-p )∑(1-m )N i =1V max +p ∑(1-m )N i =1(V max -d )](2.1.4)其中m 是参数,取值为:在Δx i ≤V max -pd 时取值为“1”,在Δx i >V max -pd 时取值为“0”.由平均密度定义(1.2.2)式得系统的流量为: J =m (1-ρ)+V max (1-m )(1-p )p d +p (V max -d )(1-m )p d (2.1.5)由上面的讨论得:当ρ≤d V max +d -pd 时,m =0,当ρ>d V max+d -pd 时,m =1,即交通流在ρ0=d V max +d -pd时发生相变.图4是取d =7.5,V max ={37.5,30,22.5,15,7.5},p =0.5的流量—密度关系.图5反应刹车概率对交通流的影响.可以看到刹车概率只对低密度区域有作用,且刹车概率能改变相变点的值.2.1.2 车辆非均匀分布的情况同第2部分的方法,引进两个量辅助参量θ(0≤θ≤1 2)和ε(0≤ε≤1)(其意义如1.2.2)来描述车辆分布的不均匀性,将系统中的车辆按车间距分为3类系统的平均速度:v =Δx i —[m (1-2θ)+l θ(1-ε)+n θ(1+ε)]+[1-m (1-2θ)-l θ-n θ][p (V max -d )+(1-p )V max ](2.1.6)流量为: J =(1-ρ)[m (1-2θ)+l θ(1-ε)+n θ(1+ε)]+ρd [1-m (1-2θ)-l θ-n θ]×[p (V max -d )+(1-p )V max ](2.1.7)其中m ,l ,n 的取值如下:在区间[0,ρc 1],m =0,l =0,n =0;在区间[ρc 1,ρc 2],m =0,l =1,n =0;在区间[ρc 2,ρc 3],m =1,l =1,n =0;在区间[ρc 3,1],m =1,l =1,n =1.ρc 1,ρc 2,ρc 3的取值分别为:ρc 1=(1-ε)d V max +d -dp -d ε,ρc 2=d V max +d -dp,ρc 3=d (1+ε)V max +d -dp +d ε3 结 论1)从图2来看,连续决定性模型的结果与离散FI 模型的结果完全相同.说明离散决定性FI 模型统计的是系统平衡态时流量与密度之间的关系.2)从图3我们可以看出,在密度区间[ρc 1,ρc 2]参数θ,ε对交通流量的影响很大.表现出车辆运行在密度区间[ρc 1,ρc 2]容易出现不稳定状态.这是因为这时车间距在V max 附近,部分车辆间距的增大不能使得车速增加,可是这又必然导致其他车辆间距的减少而导致车速减小,即系统的流量立即减小.即只要由一辆车出现车距偏离平均车距,则整个系统出现不稳定行为,这即是各种交通模型及其实际交通流中的亚稳态.3)在密度区间[0,ρc 1]参数θ,ε对交通流量的影响很小.因为在这个区间里,汽车数量少,各车辆间距都比较大,部分车辆的间距减小并不影响本身及其其他车辆的车速,即相互作用也小,所以分布方式对系统流量的影响不大.35第6期肖世发等:连续交通流模型的建模与研究36湛江师范学院学报(自然科学)第27卷,1]参数θ,ε对交通流量的影响也很小.这是因为系统中的车辆密度大,车辆能够自4)在密度区间[ρc2由运动的空间小,部分车距的减小,则其他车辆的速度必然会增大,相互抵消,所以各种分布对系统流量的影响也小.5)刹车概率对交通流量的影响只是表现为在低密区域使流量随密度的增大幅度变缓,同时改变交通流从自由流到堵塞交通的相变点.这在性质上与离散FI模型相同,但与FI模型的结果有一定的差别,这主要是我们推导的只是一种静态交通,而离散FI模型的计算机模拟结果是动态的交通处于平衡态的结果.进一步的研究是采用动态的研究方法,从连续模型推导出交通流的动态解析结果.建立解析的交通流理论.参考文献:[1]Li X B,Wu Q S,Jiang R.Cellular automaton model considering the velocity effect of a car on the successive car[J].Phys Rev:E,2001,64:066128-066131.[2]Wolfram S.Theory and Application of Cellular Automata[M].Singapore:World Scientific,1986.[3]Gartner N H,Wilson N H M.Transportation and Traffic Theory[M].New York:Elsevier,1987.[4]Nagel K,Schreckenberg M.A Cellular automaton model for freeway traffic[J].J Phys I France1992,2:2221-2229.[5]Fukui M,Ishibashi Y.Traffic flow in1D cellular automaton model including cars movin g with high speed[J].J Phys Soc Japan1996,65:1868-1870.[6]董力耘,薛郁,戴世强.基于跟车思想的一维元胞自动机交通流模型[J].应用数学和力学,2002,23(4):331-337.Modeling&Investigation of Continuous Traffic Flow ModelXIA O Shi_fa,LIA NG Nan_fu(School of Physics,Zhanjiang Normal College,Zhanjing,Guangdong524048,China)A bstract:Based on discrete FI model,a continuous one_dimensional CA traffic model was proposed to describe the high way and r esearch into the fundamental diagrams of the model and its unsteady behaviors.For the sake of comparing the discrete model,influence of flow caused by braking rate is researched.At last,we get analysis result of the traffic flow,and find that unsteady behavior of traffic flo w appears very easily in certain density districts.And this is exactly the metastable state.Key words:traffic flow;cellular automaton;traffic model;Fukui_Ishibohi model;analysis model;metastable state。
不同交通流的连续模型
交通运输系统工程与信息
Junl rnpr t n s m E g er g Ifr ao T cnl y ora o T asot i S t s i ei ad om t n h o g f ao y e nn n n n i e o
_刁 P 2
dy -dt
(4 1) () 7
-一
p(, (p 兴 v) ,)
其中 c 。 表示直接与车辆跟驰的弹性有关的音速, ,
这就是著名的Pps i 模型. e Pye an 根据车辆跟驰理论的概念提出了平均
速度 v与密度 P 存在下列关系 vx t T) , p △ , ) ( ,+ “v(( x+ £ t ) () 8 并认为 △ = 5p, T为车辆跟驰理论中的 x 0 / 这里 . 延滞时间, 对式 ( ) 8 左右两边分别关于 T和 △ £的 Ty r al 展开并丢掉高阶项可以得到 o
. Vo. 4 No 3 l
A gs u ut
20 04
文章编号 :1 0-74 0 4 0 -0 00 0 96 4 ( 0 ) 0 5-5 2 3
不同交通流的统一连续模型
唐铁桥, 黄海军
( 北京航空航天大学 经济管理学院, 北京 108) 003
摘要: 针对 Z ag所建立的非均衡连续交通流模型中的三个阶段模型各 自的缺点, hn 即第一阶段的模型本身并不合理, 虽然第二阶段的模型具有很好的性质, 但是这阶段仅
A s at C ni r g ot h ida m dl d avnae Z ags 一eu i i bt c; os e n a u ec i v ul es dat i hn ' nn qi r m r di b a n i d o ' i s g n o l u b cni a t fc w oe, i ae m dl p ae i nt snbe l a h uh ot ul f f m dl w c r te e o hs A o raoal ie , o g te n r il a o h h h o f s e t f l s t h m dl hs B d e d pre,t ny t nio bt en ae ad ae oe o p ae a sm go poet s iiol te si e e p s A p s C f h o o r i s h r t n w a h n h , ad m dl te ae i us b , n te t t s tre ida m dl ' b n te e o h p s C nt l ad f ta tee e i v ul e cnt h o f h s a e h a h h c h n i d o a e ruie , ppr s sm m to t peet n i m dl e o te s n ter. en i te e ue te e hd rsn a ie oe bsd h eii hoy fd h a s h a e o u f d a n x t g T e te bi o te dl d cs d d o er b i o te w oe i poe. hn s it f m e i i us a a l a s it f n m dl rvd h t ly h o s a s e n l i s n t ly h e a s T ee r, t iivri ta te fd dl rf c te pre o t fc w hrf e a l t s ie ht u ie m e cn l t poet s r f f . o a t e fd h n i o a e e h r s i f i l a o K y rs cni u m dl cr oo i ter; ti t n mnn pa ; l c e w d : ot um oe; - lwn hoy a ip i d i t s b a e o n a f l g n c ao o a h e a n ati t n rl a o p ae rl ao dm nn p ae nip i ad a t n s; xt n i t s c ao n e x i h e i o a h a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
)
对于格林希尔治线性模型有:
u n 1 u f (1 j k n 1 j k jam )
如果无法获得u的解析表达式,可以从u-k曲线通过数值方 法获得其数值解。t0+Δt(n+1)时的流率为:
q k u
n j
n n j j
Ch6 连续交通流模型
14
[算例]假设某单车道公路,没有交通产生和离去的 影响,速度—密度关系按照Greenshields线性模型, 求守恒方程的数值解。
0.0004975 0.3 0.0004975 27.8 0.0004975(1 ) 2 2 10 0.035 4.424 105 (veh/m/ln)
Ch6 连续交通流模型 17
(2)根据初始条件(n=0),计算n=1时的密度k11
k 01 k 01 1 0 t k 1 (k j 1 k 01 ) u f [k 01 (1 j ) k 01 (1 j )] j j j j 2 2x k jam k jam
作业6-2:
编制计算机程序,采用数值解法求解上述守恒方 程,并绘制出密度k的图形。
要求:源程序、流程图、结果
Ch6 连续交通流模型
20
Ch6 连续交通流模型
21
x10m
特定时刻,密度的空间分布
特定地点,密度随时间的变化
Ch6 连续交通流模型 22
高级课题:
若边界条件:k(0,t)=t(1+t)/600000;其余条件均
k k um [ln 1] 0 k x t kj
uf e
k km
1 k k [1 ] 0 km x t
Ch6 连续交通流模型 9
三、守恒方程的数值解法(数值计算)
思路:把所要考虑的道路离散成若干微小的路段 Δx,并按连续时间增量Δt来更新(迭代)离散 化的网络中每一节点的交通流参数值。
Ch6 连续交通流模型
10
1.道路离散:Δx: 7~10m, 时间离散:Δt:0.1~1. 0s,成二维网格 2. 更新(迭代)网络中每一节点的交通流参数值。
Ch6 连续交通流模型
11
将守恒方程的离散化
T为观测周期,T=nΔt,且满足下面的方程:
q k g ( x, t ) x t
j 1时,
0 1 0 t k2 1 0 k1 k2 u f k2 (1 ) 2 2x k jam
0.00099 0.3 0.00099 27.8 0.00099(1 ) 9.385 105 2 2 10 0.035
同理: j 2时,
0 1 0 t k3 k10 1 0 k2 (k3 k10 ) u f [k3 (1 ) k10 (1 )] 2 2x k jam k jam
9.8731 104
Ch6 连续交通流模型 18
(2)根据初始条件(n=0),计算n=1时的密度k11
k 01 k 01 1 0 t k 1 (k j 1 k 01 ) u f [k 01 (1 j ) k 01 (1 j )] j j j j 2 2x k jam k jam
Ch6 连续交通流模型
3
从高空俯看高速公路:来往的车流想象成河流或某 种连续的流体。(车如流水马如龙,…) 相似性:使用流量、密度、速度、运动方程等流体 力学术语来描述交通流特性。
流体(气体、液体)满足两个基本假设:即流量守 恒和速度与密度(或流量与密度)对应。
对于交通流,流量守恒容易证明,而第二个假设的 成立需要有一定的条件。 本章使用解析解法和数值解法,讨论交通波理论。
式中:g(x,t)为车道1(右侧车道)内的匝道口净流 率,驶入为正,驶出为负,
Ch6 连续交通流模型 27
且有:
Q1 {[k 2 ( x, t ) k1 ( x, t )] (k 20 k10 )} Q2 {[k1 ( x, t ) k 2 ( x, t )] (k10 k 20 )}
设:
uf =100km/h=27.8m/s, kjam=35veh/km/ln=0.035veh/m/ln,
观测周期2min;T=120s;Δt=0.3s 路段长度为2km;L=2000m;Δx=10m
Δx/Δt=33.3m/s> uf ,大于自由流速度
初始条件:k(x,0)=x(L-x)/40000000;(设定) kmax(x,0)=0.025veh/m/ln< kjam 离散: k0j=jΔx(L-jΔx )/40000000, j=0,1,2,….,200
Ch6 连续交通流模型
16
初始条件:k(x,0)= x(L-x)/40000000 ;Δx=10m 离散: k0j=jΔx(L-jΔx )/40000000,j=0,1,2,….,200 注意:当 j<0,取j=0 k n1 k n1 1 n t k n 1 (k j 1 k n1 ) u f [k n1 (1 j ) k n1 (1 j )] j j j j 2 2x k jam k jam
Qi(x,t)—车道交换率(i=1,2)(i车道之间的车辆变化 率),正值表示进入,负值表示离开。
Ch6 连续交通流模型
25
Q1 [(k2 k1 ) (k20 k10 )] Q2 [(k1 k2 ) ( k10 k20 )]
其中:α为敏感系数,单位:s-1;
Ch6 连续交通流模型
15
边界条件:k(0,t)=0; 初始条件:k(x,0)= x(L-x)/40000000 ;Δx=10m 离散: k0j= k0j=jΔx(L-jΔx )/40000000,j=0,1,2,….,200 uf =100km/h=27.8m/s, kjam=35veh/km/ln, 观测周期2min;T=120s
Ch6 连续交通流模型
12
T为观测周期,T=nΔt,且满足下面的方程:
k
n 1 j
1 n t t n n n n (k j 1 k j 1 ) ( q j 1 q j 1 ) ( g j 1 g n1 ) j 2 2x 2
式中:knj、qnj—在j路段,t=t0+nΔt时刻的密度、流量;
t0—初始时刻,通常设 t0 =0 Δt、Δx—时间和空间的增量, gnj—路段j在t=t0+nΔt的净流率(产生率减去离去率)
稳定要求:Δx/Δt大于自由流速度
Ch6 连续交通流模型
13
如果密度确定,在t=t0+nΔt时刻的速度由平衡态 速度—密度关系获得,即
u
n1 j
ue (k
n1 j
Ch6 连续交通流模型
4
§1 简单连续流模型
一、守恒方程的建立
考察一个单向连续路段,选择两个交通记数站。
设Ni为Δt时间内通过i站的车辆数,qi是通过i站的流量, Δt为1,2站同时开始记数所持续的时间。另ΔN=N2-N1, 则有: N1/Δt=q1
N2/Δt=q2 ΔN/Δt=Δq 即:ΔN=ΔqΔt
Ch6 连续交通流模型
7
二、守恒方程的解析解法
考虑没有交通产生和离去的影响, 即r(x,t)=s(x,t)=0的情况,将守恒方程变化
k k k df k k (ku ) [kf (k )] f (k ) k 0 x t x t x dk x t
j 1时,
j 2时,
1 k1 9.385 105
1 k2 9.8731104
j 3时, j 200时,
1 k3
1 k200
至此获得n=1时的密度k1j
Ch6 连续交通流模型
19
(3)根据获得的k1j,再计算n=2时的密度k2j 直至 n=400 (4)根据获得的knj,绘图
不变,则如何求守恒方程的数值解。
Ch6 连续交通流模型
23
四、 多车道流体力学模型 1. 模型设计
同向双车道空间离散图
Ch6 连续交通流模型
24
考虑一个同向2车道路段,假定每一条车道都满足守 恒方程: q1 k1 Q1 x t q 2 k 2 Q2 x t
式中:qi(x,t)—第i车道的流率(i=1,2) ki(x,t)—第i车道的密度(i=1,2)
ki0是第i车道的平衡密度(反映了容纳
车辆的能力)。
由于系统封闭,流量守恒,Q1+Q2=0
Ch6 连续交通流模型
26
2. 模型改进
①敏感系数可变,随两车道之间密度的不同而不同
②考虑进出口问题; ③考虑时间滞后影响。
q1 k1 g Q1 x t q 2 k 2 Q2 x t
(1)根据初始条件(n=0),计算n=1时的密度k10
ቤተ መጻሕፍቲ ባይዱ
1 0 t 0 k (k j 1 k j 1 ) u f [k 01 (1 ) k 01 (1 )] j j 2 2x k jam k jam
1 j
k 01 j
k 01 j
j 0时,
1 0 t k10 1 k0 k1 u f k10 (1 ) 2 2x k jam
Ch6 连续交通流模型
5
如果Δx足够短,路段内密度k保持一致,则密度 增量Δk可表示为:
( N 2 N1 ) k x qt N k x N q t k x