8-3用积分法求梁的挠度和转角
梁的挠度及转角(1)
yc2 = mL2/16EI
力的分解法----各横截面的位移或转角等 于每项荷载独立作用时在同位置产生的挠 度和转角代数和。
A= A1+ A2= FL2/16EI + mL/6EI
B= B1+ B2= - FL2/16EI - mL/3EI
yc= yc1 + yc2 = FL3/48EI +mL2/16EI
2)M(x)是连续函数。
3)梁的变形是在线弹性小变形范围内。
4)
0
x
5.EXANPEL y
例5-1:求悬臂梁B截面的转角和B截面挠度, 设 :梁长为L,EI = 常数 。
Ax
F ①求约束反力 YA=F mA= FL
x
B ②列弯矩方程 M(x)=Fx-FL
③列挠曲线近似微分方程
yM (x)F(Lx) EI EI
1. 叠加原理的适用范围 2.叠加原理
1)力的分解法-2)梁的分段法--
1. 叠加原理的适用范围
在材料的线弹性范围内,梁的小变形且纵向变形忽略不计的条件下,梁的 挠度和转角与作用在梁上的荷载成线性关系.
2.叠加原理—
1)梁在几项荷载同时作用下某一横截面 的挠度和转角,可等于每一项荷载单独作 用下该截面的挠度和转角的叠加.
1.弯曲变形的弊与利 2.挠曲线(deflection curve) 3.挠度和转角方程(equation of deflection and slope) 4.弯曲位移的符号规则
1.弯曲变形的弊与利
Fp
Fp
q
2Fp
❖❖❖使利设结用计构变成的形弯使的曲用物形功理以能条达受件到到求减影弯震象曲,,静减严不少重定动时问载会题荷破。。坏。
用积分法求梁的变形
M ( x) EI Z
d 2 M ( x) 2 dx EI Z
d 2 M ( x) 2 dx EI Z
o
M
M
x
o
x
d2y 0 2 dx
y y
M
d2y 0 2 dx
M
d 2 M ( x) 2 dx EI Z
梁挠曲线近似微分方程
d 2 M ( x) 2 dx EI Z
x0
x0
L b 3
1 L 2
一般认为梁的最大挠度就发生在跨中
b0
3 L 0.577 L 3
例题 5.4
画出挠曲线大致形状。图中C为中间铰。
F
A
两根梁由中间铰连接,挠曲线在 中间铰处,挠度连续,但转角不 连续。
1 2
1 2
例题 5.5
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
y
A
C
B
x
C
B
tan
d dx
d dx
M ( x) EI Z dx C1
M ( x ) 在小变形情况下,任一截面的转角等于挠曲线 在该截面处的切线斜率。 dx dx C1 x C2 EI Z
通过积分求弯曲位移的特征: 1、适用于细长梁在线弹性范围内、小变形情况下的对称弯曲。
B
2M ( x ) d d Fx dx C C EI Fxdx EI C z 11 z 1 dx dx 2 EI Z
x
y
边界条件
2 3 Fx C xC Fx EI dx z 2 EI z 1 x C2 26 C1
第九章梁的弯曲变形
a xl
在 x l / 2处
y 0.5l
Fb
(3l 2 4b 2 ) 48 EI
yqx(l32lx2x3) 2E 4 I
A
B
ql3 24EI
x
l 2
ymax
5ql4 384EI
梁的简图
第九章 梁的弯曲变形
挠曲线方程
y6M EI(xllx)2(lx)
yC1
aB
qa4 2EI
yC2
qa4 8EI
3)叠加 y C y C 1 y C 2 2 q E 4a 8 I q E 4a I 5 8 q E 4( a I)
第九章 梁的弯曲变形
例9-5 悬臂梁跨度为 l =2m,截面为矩形,宽b = 100mm,高h =120mm,材料的弹性模量E=210GPa, 梁上载荷如图所示,求自由端A的挠度。
挠曲线方程 y f (x)
第九章 梁的弯曲变形
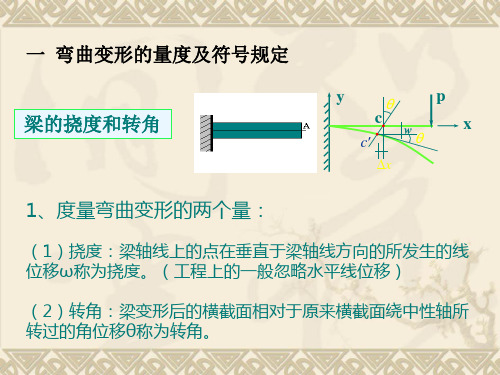
二、挠度和转角
挠度:截面形心线位 移的垂直分量称为该 截面的挠度,用 y 表 示,一般用 ymax 表示 全梁的最大挠度。
转角:横截面绕中性轴转动产生了角位移,此角
位移称转角,用 表示。小变形时,转角 很小,
则有以下关系:
tanydy
1
(x)
M(x) EI
曲线 y f(x)的曲率
1
(x)
(1yy2)3/2
二阶小量
y (1y2)3/2
M(x) EI
挠曲轴线 近似微分方程
y M(x) EI
第九章 梁的弯曲变形
挠曲轴线 近似微分方程
y
讲梁的挠曲线方程与积分解法
②积分常数的确定——边界条件和连续条件:
边界条件:梁在其支承处的挠度或转角是已知的, 这样的已知条件称为边界条件。 连续条件:梁的挠曲线是一条连续、光滑、平坦 的曲线。因此,在梁的同一截面上不可能有两个 不同的挠度值或转角值,这样的已知条件称为连 续条件。
边界条件
积分常数2n个=2n个
连续条件
列出图示结构的边界条件和连续条件。
8
代入(1)(2)得:
1 ( 1 qx3 1 qL3)
EI 6 6
1 ( 1 qx4 qL3 x qL4 )
EI 24
68
将 x 0 代入得:
A
qL3 6EI
(与C比较知E:I A C)
A
qL4 8EI
(与D比较知E:IA )D
因此
常数C表示起始截面的转角×刚度(EI)
常数D表示起始截面的挠度×刚度(EI)
x L
2
2、
d 2
dx 2
M (x) EI z
EI" 1 qx2
2
积分一次: EI' EI 1 qx3 C (1)
积分二次:
6
EI 1 qx4 Cx D (2)
24
B X``
3、确定常数C、D.
由边界条件: x L, 0 代入(1)得: C 1 qL3
6
x L, y 0 代入(2)得: D 1 qL4
支座反力,分段列弯矩方程; 分段的原则:
①凡载荷有突变处(包括中间支座),应作为分段点;
②凡截面有变化处,或材料有变化处,应作为分段点;
③中间铰视为两个梁段间的联系,此种联系体现为两部分之间 的相互作用力,故应作为分段点;
(2)分段列出梁的挠曲线近似微分方程,并对其积分 两次
工程力学--材料力学(北京科大、东北大学版)第4版第六章习题答案

第六章习题6—1用积分法求以下各梁的转角方程、挠曲线方程以及指定的转角和挠度。
已知抗弯刚度EI为常数。
6-2、用积分法求以下各梁的转角方程、挠曲线方程以及指定的转角和挠度。
已知抗弯刚度EI为常数。
6-3、用叠加法求图示各梁中指定截面的挠度和转角。
已知梁的抗弯刚读EI为常数。
6-4阶梯形悬臂梁如图所示,AC段的惯性矩为CB段的二倍。
用积分法求B端的转角以及挠度。
6-5一齿轮轴受力如图所示。
已知:a=100mm,b=200mm,c=150mm,l=300mm;材料的弹性模量E=210Pa;轴在轴承处的许用转角[]=0.005rad。
近似的设全轴的直径均为d=60mm,试校核轴的刚度。
回答:6-6一跨度为4m的简支梁,受均布载荷q=10Kn/m,集中载荷P=20Kn,梁由两个槽钢组成。
设材料的许用应力[]=160Ma,梁的许用挠度[]=。
试选择槽钢的号码,并校核其刚度。
梁的自重忽略不计。
m壁厚=4mm,单位长度重量6-7两端简支的输气管道,外径D=114m。
q=106N/m,材料的弹性模量E=210Gpa。
设管道的许用挠度试确定管道的最大跨度。
6-845a号工字钢的简支梁,跨长l=10m,材料的弹性模量E-210Gpa。
若梁的最大挠度不得超过,求梁所能承受的布满全梁的最大均布载荷q。
6-9一直角拐如图所示,AB段横截面为圆形,BC段为矩形,A段固定,B段为滑动轴承。
C端作用一集中力P=60N。
有关尺寸如图所示。
材料的弹性模量E=210Gpa,剪切弹性模量G=0.4E。
试求C端的挠度。
提示:由于A端固定,B端为滑动轴承,所以BC杆可饶AB杆的轴线转动。
C端挠度由二部分组成;(1)把BC杆当作悬臂梁,受集中力P作用于C端产生的挠度,;(2)AB杆受扭转在C锻又产生了挠度,。
最后,可得C端的挠度6-10、以弹性元件作为测力装置的实验如图所示,通过测量BC梁中点的挠度来确定卡头A处作用的力P,已知,梁截面宽b=60mm,高h=40mm,材料的弹性模量E=210Gpa。
用积分法求挠度和转角
挠曲线的近似微分方程为
d 2 w q (x 2 lx) dx 2 2EI
2) 对微分方程进行积分并确定积分常数。 对挠曲线近似微分方程
积分得
q ( x3 lx2 ) C
2EI 3 2
w q ( x4 lx3 ) Cx D 2EI 12 6
简支梁在铰支座处的挠度均为零,即
x=0,w=0; x=l,w=0
1 M (x) ρ(x) EI
由高等数学可知,平面曲线w = w(x)上任一点的曲率为
目录
弯曲变形\用积分法求挠度和转角
d2w
1 dx 2
(x)
[1
(
dw
)
2
]
3 2
dx
在小变形条件下,转角是一个很小的量,故 (dw)2 << 1,于是
上式可简化为
dx
1 ρ(x)
d2w dx2
d2w dx2
由于梁的支承和受力对称于梁跨中点,因而梁的挠曲线应为一
对称于梁跨中点的下凸曲线。因此,梁的最大挠度发生在跨中点截
面C (x=l/2)处,其值为
wmax
wC
5ql4 384EI
目录
弯曲变形\用积分法求挠度和转角
最大转角发生在支座A (或支座B )处,其值为
max
A
ql3 24EI
()
目录
弯曲变形\用积分法求挠度和转角 【例6.3】 图示简支梁在C点处受集中力F作用,试求梁的挠曲
说明横截面B的形心向下移动。
目录
弯曲变形\用积分法求挠度和转角 【例6.2】 图示简支梁AB,受均布荷载q作用。求梁的挠曲线方
程和转角方程。并计算梁的最大挠度和最大转角。设弯曲刚度EI为 常数。
材料力学网上作业题参考答案
东北农业大学网络教育学院材料力学网上作业题(2015更新版)绪论一、名词解释1.强度2. 刚度3. 稳定性4. 变形5. 杆件6.板或壳7.块体二、简答题1.构件有哪些分类2. 材料力学的研究对象是什么3. 材料力学的任务是什么4. 可变形固体有哪些基本假设5. 杆件变形有哪些基本形式6. 杆件的几何基本特征7.载荷的分类8. 设计构件时首先应考虑什么问题设计过程中存在哪些矛盾第一章轴向拉伸和压缩一、名词解释1.内力2. 轴力3.应力4.应变5.正应力6.切应力7.伸长率8.断面收缩率9. 许用应力 10.轴向拉伸 11. 冷作硬化二、简答题1.杆件轴向拉伸或压缩时,外力特点是什么2. 杆件轴向拉伸或压缩时,变形特点是什么3. 截面法求解杆件内力时,有哪些步骤4.内力与应力有什么区别5.极限应力与许用应力有什么区别6.变形与应变有什么区别7.什么是名义屈服应力8.低碳钢和铸铁在轴向拉伸时,有什么样的力学特性9.强度计算时,一般有哪学步骤10.什么是胡克定律11.表示材料的强度指标有哪些12.表示材料的刚度指标有哪些13.什么是泊松比14. 表示材料的塑性指标有哪些15.拉压杆横截面正应力公式适用范围是什么16.直杆轴向拉伸或压缩变形时,在推导横截面正应力公式时,进行什么假设三、计算题1. 试用截面法求下列各杆指定截面的轴力。
2. 试用截面法求下列各杆指定截面的轴力。
3. 试用截面法求下列各杆指定截面的轴力。
4. 试用截面法求下列各杆指定截面的轴力。
5. 试用截面法求下列各杆指定截面的轴力。
6. 试用截面法求下列各杆指定截面的轴力。
7 高炉装料器中的大钟拉杆如图a所示,拉杆下端以连接楔与大钟连接,连接处拉杆的横截面如图b所示;拉杆上端螺纹的小径d = 175 mm。
已知作用于拉杆上的静拉力F=850 kN,试计算大钟拉杆横截面上的最大静应力。
8 一桅杆起重机如图所示,起重杆AB为一钢管,其外径D = 20 mm,内径d≈18 mm;钢绳CB的横截面面积为10 mm2。
材料力学 积分法求梁的变形
M ( x ) = r EI Z 1
1 = ± r d 2 w dx 2 d w é 2 ù 1 + ( ) ê ú dx ë û
3
±
d 2 w dx 2 d w 2 ù é 1 + ( ) ú ê dx û ë
3
M ( x ) = EI Z
边界条件、连续条件应用举例
弯矩图分三段,共6 个积分常数需6个边界条 件和连续条件 A B
P C D
w
铰连接
ω A点: A = 0, q A = 0
B 点 : w B 左 = w B 右
C点 : w C左 = w C右
D点:w D = 0
q C 左 = q C 右
边界条件、连续条件应用举例
y
边界条件
3 qL C1 = 6 EI z
EI zw =
1 (L - x )4 + C q 1 x + C 2 24
x = 0 x = 0 x = L
q = 0 w = 0
qL3 q B = 6 EI z
q =-
3 qL C2 =24 EI z
挠曲线方程应分两段AB,BC.
F A
a
q
B
EI z
L
共有四个积分常数
C
x
边界条件
x = a x = a + L
连续条件
w B = 0 wC = 0
y
x = a
w B1 = w B 2 q B1 = q B 2
例题 5.4 &
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
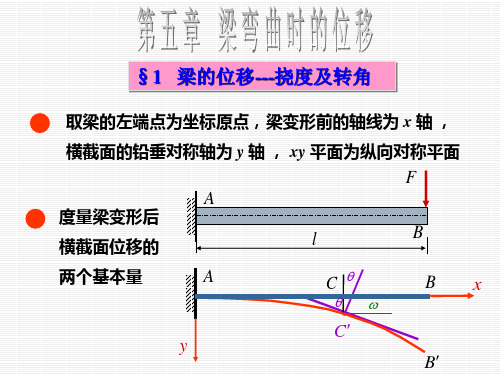
梁的弯曲-变形刚度计算
一、梁的变形度量——挠度与转角
x
1 1'
F
A
C
B
x
y
C'
y
1'
1
Байду номын сангаас
y f ( x)
——挠曲线方程
一、梁的变形度量——挠度与转角
x
1 1'
F
A
C
B
x
y
1'
y
C'
1
在小变形下: 即:
dy y tan dx
——转角方程
任一横截面的转角 = 挠曲线在该截面形心处切线的斜率
2
9 ql 2 128
M max
1 2 M A ql 8
例 14 试作图示超静定梁的剪力图和弯矩图。
q
5.讨论 设MA为多余约束力 列变形几何方程
A Aq AM 0
A
A l
B 原结构
q MA A B 静定基
查表
Aq
ql M Al , AM A 24 EI 3 EI
5Fl 3 Fl 2 Fl 3 l 6 EI 3 EI 2 EI
F A l C l
Me B
yBM
A F A C B
e
BM
B
e
Me
BF
yBF
3. Me和F共同作用时
2 M e l Fl 2 B BM e BF EI 2 EI 2 M e l 2 5Fl 3 y B y BM e y BF EI 6 EI
2.确定积分常数
FBy=
l
Me l
由 y x 0 0, D 0
梁的变形教程
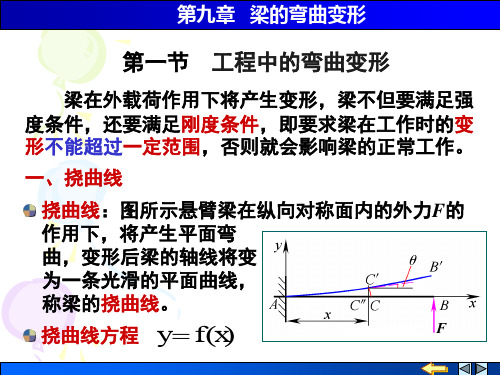
第一节 工程中的弯曲变形问题
梁在外载荷作用下将产生变形, 梁在外载荷作用下将产生变形,梁不但要满足强 刚度条件, 度条件,还要满足刚度条件 即要求梁在工作时的变 度条件,还要满足刚度条件,即要求梁在工作时的变 不能超过一定范围 否则就会影响梁的正常工作。 一定范围, 形不能超过一定范围,否则就会影响梁的正常工作。 一、挠曲轴线 挠曲轴线:图所示悬臂梁在纵向对称面内的外力F 挠曲轴线:图所示悬臂梁在纵向对称面内的外力 的作用下, 的作用下,将产生平面弯 曲,变形后梁的轴线将变 为一条光滑的平面曲线, 为一条光滑的平面曲线, 称梁的挠曲轴线 挠曲轴线。 称梁的挠曲轴线。 挠曲轴线方程
M ( x) y = ∫∫ dx ⋅ dx + Cx + D EI
第八章 梁的变形 转角方程 转角方程
挠度方程 挠度方程
M ( x) θ = y′ = ∫ dx + C EI M ( x) y = ∫∫ dx ⋅ dx + Cx + D EI
式中积分常数 、 由边界条件 由边界条件( 式中积分常数C、D由边界条件(梁中已知的截面 积分常数 位移)确定: 位移)确定: 简支梁: 简支梁: y A 悬臂梁: 悬臂梁: θ A
ql C= 24 EI 4 ql D=− 30 EI
3
4
5
梁的挠度方程
qx ql x ql + − y=− 120 EIl 24 EI 30 EI
5
3
4
令 x = 0,得B截面的挠度为 截面的挠度为
ql yB = − (↓ ) 30 EI
第八章 梁的变形
第三节 叠加法求梁的弯曲变形
挠曲轴线 近似微分方程
θ A = M (l 2 − 3b 2 )
试用积分法求图示各梁的转角方程和挠度方程
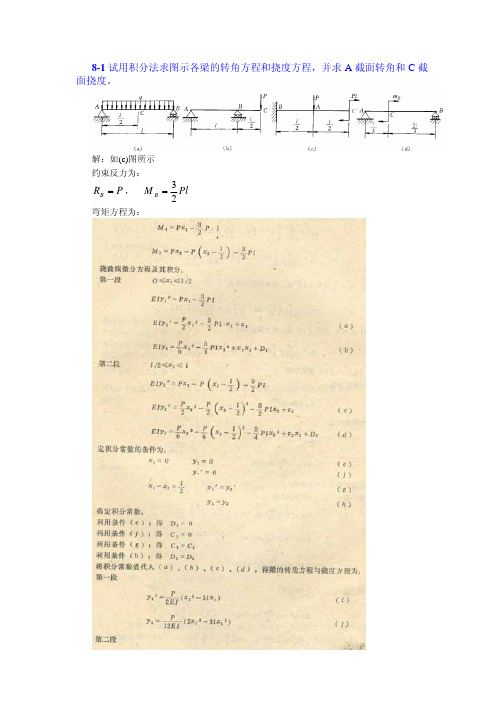
8-1试用积分法求图示各梁的转角方程和挠度方程,并求A 截面转角和C 截面挠度。
解:如(c)图所示 约束反力为:P R B =, Pl M B 23=弯矩方程为:8-3 滚轮在天车梁上移动。
现将梁做成向上微弯,若要求滚轮在梁上能走一水平路径,问需把梁预弯成什么形状(用v=f (x)的方程表示)才能达到要求?8-6 试画出下列各梁的挠曲线的大致形状。
注意曲率符号及支座约束条件。
8-9.EIa q y c 84=,此梁曲线的大致形状如图c 所示。
8-178-23 试用,叠加法计算图示等截面刚架B 处的垂直位移。
C 处为刚节点。
此刚架的截面为圆形,抗弯刚度为EI ,抗扭刚度为GI P 。
解: 分段考虑(1)AC :C 点受力P 和力矩M =Pl 的共同作用。
在力P 作用下:EIpl y c 331=在力矩M 作用下:ρϕGI pl l y c 22== (2)BC :EIpl y B 33= ρGI pl EI pl y y y v B c c B 332132+=++=8-28 A 1B 梁用A 2C 梁加固,两梁的EI 相同,试用变形比较法求两梁接触处的压力Y C 。
并用叠加法求v B 。
解:分开考虑两个梁 (1) 对A 1B :A 1B 受到P 和Y c 的共同作用,当P 单独作用时:))(3(6121/1↓−=l l EI pl v c当Y c 的单独作用:)(321//1↑=EIl Y v c c//1/11c c c v v v −=∴对A 2C :)(3212↓=EIl Y v c c利用,可得: 21c c v v =∴ 114)3(l l l p Y c −=(2)当P 单独作用时:)(321↓=EIpl v B当Y c 的单独作用: ))(3(61211↓−=l l EIl Y v c B)3(63121321l l EIl Y EI pl v v v c B B B −−=−=∴ 8-30 图示结构,悬臂梁AB 和简支梁DG 均用18号工字钢制成,BC 为圆截面钢杆,直径d =20mm 。
梁的挠度和转角问题分析
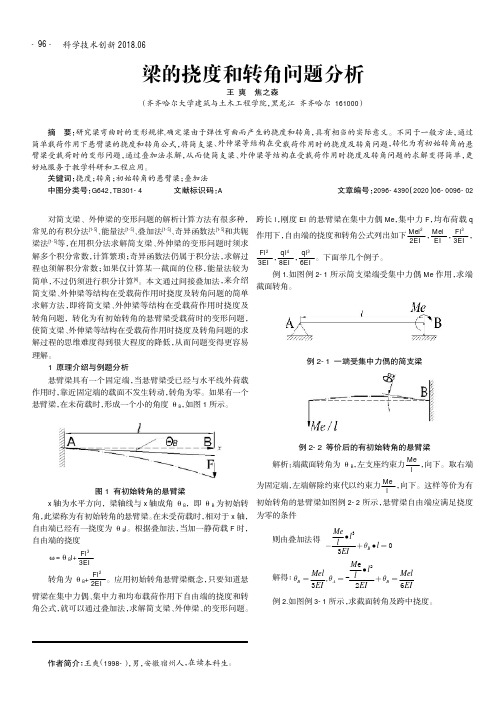
科学技术创新2018.06梁的挠度和转角问题分析王爽焦之森(齐齐哈尔大学建筑与土木工程学院,黑龙江齐齐哈尔161000)对简支梁、外伸梁的变形问题的解析计算方法有很多种,常见的有积分法[1-5]、能量法[1-5]、叠加法[1-5]、奇异函数法[1-5]和共轭梁法[1-5]等,在用积分法求解简支梁、外伸梁的变形问题时须求解多个积分常数,计算繁琐;奇异函数法仍属于积分法,求解过程也须解积分常数;如果仅计算某一截面的位移,能量法较为简单,不过仍须进行积分计算[6]。
本文通过间接叠加法,来介绍简支梁、外伸梁等结构在受载荷作用时挠度及转角问题的简单求解方法,即将简支梁、外伸梁等结构在受载荷作用时挠度及转角问题,转化为有初始转角的悬臂梁受载荷时的变形问题,使简支梁、外伸梁等结构在受载荷作用时挠度及转角问题的求解过程的思维难度得到很大程度的降低,从而问题变得更容易理解。
1原理介绍与例题分析悬臂梁具有一个固定端,当悬臂梁受已经与水平线外荷载作用时,靠近固定端的载面不发生转动,转角为零。
如果有一个悬臂梁,在未荷载时,形成一个小的角度θB ,如图1所示。
图1有初始转角的悬臂梁x 轴为水平方向,梁轴线与x 轴成角θB ,即θB 为初始转角,此梁称为有初始转角的悬臂梁。
在未受荷载时,相对于x 轴,自由端已经有一挠度为θB l 。
根据叠加法,当加一静荷载F 时,自由端的挠度ω=θB l+Fl 33EI 转角为θB +Fl22EI。
应用初始转角悬臂梁概念,只要知道悬臂梁在集中力偶、集中力和均布载荷作用下自由端的挠度和转角公式,就可以通过叠加法,求解简支梁、外伸梁、的变形问题。
跨长l ,刚度EI 的悬臂梁在集中力偶Me ,集中力F ,均布荷载q 作用下,自由端的挠度和转角公式列出如下Mel 22EI ,Mel EI ,Fl 33EI,Fl 23EI ,ql 48EI ,ql 36EI。
下面举几个例子。
例1.如图例2-1所示简支梁端受集中力偶Me 作用,求端截面转角。
工程力学08-梁的位移分析和刚度条件

8.1 基本概念
8.1.2 梁的挠度与转角
现研究梁上一截面C的位移 ,它由C移动到C1位置
w—截面形心的垂直位移,称“挠度” q—截面相对变形前绕中性轴转过的角度,称 “转角” y θ 挠度与转角的关系 A C dw θ = tanq (8-2) dx C1 x 或: dw = q (8-3) dx w=w(x)—挠度是截面的函数,称“挠度方程”
(0≤x1≤a)
Fb x12 AC段: EIq1=EIw1’= + C1 2 l Fb x13 EIw1= + C1x1+ D1 l 6
(a)
(b)
《工程力学》
Bengbu college . The Department of Mechanical and Electronical Engineering .w.p_chen
(a≤x≤l)
应用举例a xຫໍສະໝຸດ C x2 lFb
FRB B
x
Fb 2 – b2 – 3x2)+ 3l (x – a)2] q=+ [(l b 6EIl
Fb 2 2 –x2)x+ l (x – a)3] w= + [(l – b 6EIl b
《工程力学》
Bengbu college . The Department of Mechanical and Electronical Engineering .w.p_chen
8.2 小挠度微分方程及其积分
8.2.2 积分常数的确定 约束条件与连续条件 常见约束、连续条件 载荷作用处: y
F
a b x
x=a, w1=w2,q1=q2
中间支座处:
y x l a
连 续 条 件
材料力学 (8)
C1
ql
24
梁的转角方程和挠曲线方程分别为
'
qx 24 EI q 24 EI (l 2lx x )
3 2 3
(l 6lx 4 x )
3 2 3
RA
A
x
q
A
l 2
RB
B
在 x0 和 xl 处 转角的绝对值相等, 且都是最大值
x
CθB
y
3
l
θ
max
qc
5qL
4
C
z
l 2
384 EI z
转角() :横截面对其原来位置的角位移 , 称为该截面的
转角。
转角
A C B x
ω 挠度
C' y B'
挠曲线 :梁变形后的轴线称为挠曲线 。
挠曲线方程为
f ( x)
式中 ,x 为梁变形前轴线上任一点的横坐标 ,ω为该点的挠度。
挠度与转角的关系: tg ' f '( x)
C
y
连续条件
x
L 2
B1 B 2
B1 B 2
例题 5.6
用积分法求图示梁挠曲线方程时,试问下列梁的挠曲线
近似微分方程应分几段;将分别出现几个积分常数,并写出其确 定积分常数的边界条件。 挠曲线方程应分两段AB,BC.
F
EI
z1
共有四个积分常数
x
EI
z2
边界条件
A
L 2
B
RA RB ql 2
A
x
q
B
l
x
y 例题 5 .2图
此梁的弯矩方程及挠曲线微分方程分别为
第八章 弯曲刚度详解
40
3
40
12 3
边界条件:当 x 0 时,y 0 ;
当 x 2m 时, y l 2.29 103 m
代入上式得 C 11.145103,D 0
故 y 3 102 ( 20 x4 20 x3) 11.145 103 x
40
12 3
当 x 1m 时,y 7.395 103 m 7.395 mm 。
1 6
Pa3
C2
0
EI
(0)
1 2
Pa2
C1
0
a
P
L
x
f
(a ) (a ) C1 D1
f (a ) f (a )
C1a C2 D1a D2
C1
D1
1 2
Pa2
; C2
D2
1 6
Pa3
写出弹性曲线方程并画出曲线
P
f
(x)
6EI P
6EI
(a x)3 3a2 x a3 3a2 x a3
=+ +
A
D
B
图1
P1=1kN B
图2
C
C
M Bx
f2
P
q [例4] 按叠加原理求A点转角和
A
C
B C点挠度。
a
a
P
=
解: ① 载荷分解如图
② 由梁的简单载荷变形表,
A
B
查简单载荷引起的变形。
+
PA
Pa2 4EI
f PC
Pa3 6EI
A
q B
qA
qa3 3EI
f qC
5qa 4 24EI
A
P
q B
第七章梁的位移转角、挠度

第七章 梁的弯曲变形
§7-2 挠曲线的近似微分方程
2.挠曲线的近似微分方程
推导弯曲正应力时,得到:
1M
ρ EIz
忽略剪力对变形的影响
1 M(x)
( x) EIz
5
第七章 梁的弯曲变形
§7-2 挠曲线的近似微分方程
1 M (x)
EI Z
1
d2 y dx2
1
(
dy dx
边界条件
x0 0
x0 y 0
xL
B
qL3 6EI z
C1
qL3 6EI z
C2
qL3 24 EI z
yB
qL4 8 EI z
EIz
y
1 24
qL
x4
C1x
C2
q L x3 L3 6EI z
y q L x4 4L3x L4 24 EIz 12
C
1 5q0L4 2 384EIZ
5q0 L4 768EI Z
21
第七章 梁的弯曲变形
§7-4 用叠加法求梁的变形
A
B
L 2a
q
L 2a
例7-6 已知:悬臂梁受力如图
示,q、l、EI均为已知。求C 截面的挠度yC和转角C
C 解 1)首先,将梁上的载荷
变成有表可查的情形
为了利用梁全长承受均
Fb L
x
F b
C
l
y
x
最大转角 y'' 0 M x 0
A
§8-3 用积分法求梁的挠度和转角

§8-3 用积分法求梁的挠度和转角梁是一种常见的结构,在结构设计和分析中经常需要求解梁的挠度和转角。
挠度和转角是评价梁在受载过程中变形情况的重要指标,对于保证梁的安全性和使用寿命有着重要作用。
本文将介绍用积分法求解梁的挠度和转角的方法。
首先,需要明确梁的基本假设及其约束条件。
梁的基本假设包括:梁轴线是直线、截面内部应力分布均匀、横截面形状及尺寸在受力过程中不变、截面在平面内转动的角度很小、且不影响梁内部的应力分布等。
约束条件一般有:端部固定或支承等。
接着,需要根据约束条件和配重条件列出梁的弯曲方程和边界条件。
假设梁长度为L,x轴方向为梁轴线方向,则弯曲方程为:d^2y/dx^2+M/(EI)=0其中,y是梁的挠度,M是弯矩,E是杨氏模量,I是梁的截面惯性矩,上述方程即为梁的弯曲方程。
根据约束条件和配重条件,可以列出边界条件。
对于悬臂梁,端点处有一个支承,因此边界条件为y(0)=0,d^2y/dx^2(0)=0;对于双端支承梁,两端都有支承,因此边界条件为y(0)=y(L)=0,d^2y/dx^2(0)=d^2y/dx^2(L)=0。
根据弯曲方程和边界条件可以解出梁的挠度和转角。
但是,弯曲方程中的弯矩是未知的,需要通过力学分析求解。
通常的做法是,将梁截面分成若干小段,每段长度为dx,考虑该段上下两点的受力平衡条件,可以得到该段的弯矩M。
然后将弯矩代入弯曲方程求解,就可以得到该段的挠度和转角。
最后将所有小段的挠度和转角相加即可得到整个梁的挠度和转角。
具体的计算过程可以用数值方法进行,也可以用解析方法求解。
下面介绍解析方法的两种常用技巧:超定积分法和欧拉-伯努利积分法。
超定积分法是一种较为简单和常用的求解梁挠度和转角的方法。
它的基本思想是将弯曲方程两端同时积分两次,得到整个梁的挠度函数和转角函数,然后根据边界条件解出各个常数。
以悬臂梁为例,弯曲方程为:将上式积分两次,得到:其中,b1和b2是积分常数,需要根据边界条件求解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§8-3 用积分法求梁的挠度和转角
解:1、绘制挠曲线的基本依据
1 y M (x)
(x)
EI z
根据弯矩的正、负、零值点或零值区,确定挠曲线的凹、
凸、拐点或直线区。
在梁的被约束处,应满足位移边界条件;在分段处,则 应满足位移连续条件。
2、画挠曲线的大致形状图
AD段的弯矩为正,DC段的弯矩为负,横截面D的弯矩为零,其横坐标 为XD=8a/5。
3、确定转角方程和挠度方程
F (lx x2 ) y F (lx2 x3 )
EI 2
EI 2 6
4、确定最大转角和最大挠度
x l,
max
Fl2 2EI
,
ymax
Fl3 3EI
§8-3 用积分法求梁的挠度和转角
例8-2 一简支梁如图8-9所示,在全梁上受集度为q的均布载荷作用。试求
§8-3 用积分法求梁的挠度和转角 AD段为凹曲线,DC段为凸曲线,D截面存在拐点。
在支座A、B处挠度为零。在梁的交界面与截面D处,挠 曲线满足连续、光滑的条件。
§8-3 用积分法求梁的挠度和转角
§8-3 用积分法求梁的挠度和转角
解:1、写出x截面的弯矩方程
M (x) F(l x)
列挠曲线近似微分方程并积分
§8-3 用积分法求梁的挠度和转角 梁的挠曲线近似微分方程:
d 2 y M (x) dx2 EI
EI
d2y dx2
M
(x)
积分一次得转角方程为:
EIy M (x)
dy dx
M (x) EI
dx
C
再积分一次得挠度方程为:
y
M (x) EI
dx
dx
Cx
D
§8-3 用积分法求梁的挠度和转角
梁截面的已知位移条件或位移约束条件,称为梁位移的边界条件。 积分常数C、D 由梁的位移边界条件和光滑连续条件确定。
位移边界条件
~
AA
~~
~
~
A
A
A A AA
A AA A
~
~
yA 0
yA 0
A 0
~ ~~ ~~
A
A AAA
光滑连续条件
A
A AA
AA AA A源自~ ~~~ ~ ~
~
~
yA yAL yAR
-弹簧变形 AL AR
yAL yAR
§8-3 用积分法求梁的挠度和转角 外伸梁,承受集中载荷作用,试绘制挠曲线的大致形状图。
此梁的转角方程和挠度方程,并确定最大转角和最大挠度。
解:
FRA
FRB
ql 2
M(x) ql x q x2
22
EIy ql x q x2 22
EIy ql x2 q x3 C 46
EIy ql x3 q x4 Cx D 12 24
由边界条件:
x 0,yA 0 ; D 0
xl,
yB 0 ;
C ql3 24
§8-3 用积分法求梁的挠度和转角
例8-2 一简支梁如图8-9所示,在全梁上受集度为q的均布载荷作用。试求 此梁的转角方程和挠度方程,并确定最大转角和最大挠度。
x 0,yA 0 ; D 0
xl,
yB 0 ;
C ql3 24
EIy ql x3 q x4 Cx D 12 24
ql x3 q x4 ql3 x 12 24 24
y qx (l3 2lx2 x3) 24EI
EIy ql x2 q x3 ql3 4 6 24
q (l3 6lx2 4x3)
24EI
最大转角和最大挠度分别为:
5ql 4
ymax
y
x l 2
384EI
max
A
B
ql3 24 EI
d2y EI dx2 M (x) F(l x)
积分一次
dy F (lx x2 ) C
dx EI 2
再积分一次
y
F
lx 2 (
x3 ) Cx D
EI 2 6
§8-3 用积分法求梁的挠度和转角
2、由位移边界条件确定积分常数
x 0, A 0
x 0, yA 0
代入求解
C 0, D 0