舵令及操舵方法和要领
船长、驾驶员发布指挥口令的技巧
船长、驾驶员发布指挥⼝令的技巧船长和驾驶员传递指令的最有效⽅式就是发布简洁、明了的⼝令。
各种版本航海操纵教科书都编有船舶操纵简洁操作指令,说到底就是⾔之有效的⼝令,以便让操作者迅速理解并作出准确的操作反应。
诸如:需要主机动作的车钟令、需要⽔⼿迅速相应作出操作反应的舵令、船舶抛锚时向船⾸⼈员发出的抛锚指令、靠泊系缆指令等,都是⾮常简洁的。
实践中船长、驾驶员不难看出,所有指令⾮常⼝语化、有明确操作意图的短语复合词。
如操作船舶前进速度快慢的标准车钟令:前进⼀、前进⼆、前进三等。
当船长吐字清晰地发出车钟令后,驾驶员很快敏捷地反应,然后⾮常默契、⾃然地演化为⾏动,把⼝令转变成主机动作,完成船长操纵船舶⼝令所需要的效果。
或者,船长、驾驶员指挥⽔⼿操舵,他的⼝令也必须让⽔⼿即时理解和反应动作,以确保船舶航⾏安全,准确避让各种态势的船舶。
如船长发出:“左舵⼗!”⽔⼿马上条件反射出“左舵⼗”的动作,同时在⼝中马上报出复诵:“左舵⼗!”,⼀旦操作按⼝令完成,⽔⼿也会⾮常⾃然地报告执⾏的效果:“⼗度左!”航海习惯要求演变成了常规⼝令制度,即⼝令短促、强硬、简单、⾏之有效。
为了避免传递⼝令的失误和回应操作动作的准确与否,被授令的驾驶员、⽔⼿必须严格执⾏回令制度。
毫⽆疑问,航海特殊环境使得船长、驾驶员的指令变得⾮常规范化了,以致在⼀般⾮职业⼈群中只要谈论或者涉及航海故事,他们都会不约⽽同地议论⼝令的重复,问:“为什么反映航海操作会叠现航海⼝令的重复性,这是否有点繁琐和浪费时间,除了给⼈⼀种严肃、绝对服从的概念外,是否反映船长的权威?。
”回答这是航海的特殊性,与船长权威⽆关。
因为在航海的紧张关头船长必须清楚地下达⼝令,让同样处在紧张环境下的⽔⼿们即刻理解,完成⼝令规定的动作,绝对避免废话。
假如,⼀句⾮常规的、如考试题⽬⼀样、需要缜密思考的⼝令,相信出现偏差⾏为和误操作就⼤了。
复诵是为了让发布指令者检查⾃⼰的⼝令准确与否,辨别复诵者是否误解⼝令,导致错误动作。
常用的标准舵令定稿版
常用的标准舵令HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】常用的标准舵令除上表标准舵令外,以下舵令用得也较多:“Port/Starboard a little”——————————————“左/右舵一点”“Port/ Starboard easy”——————————————“左/右舵慢”“Ease the wheel”—————————————————“回舵”“Nothing to port/starboard”—————————————“不要偏左/右”“How answer?”—————————————————“舵灵吗?”“How is the steering?”——————————————“舵灵吗?”“Answers all right”————————————————“舵很灵”“Answers too slow”————————————————“反应很慢”“No steering/Steerage”———————————————“舵不灵”“What rudder?”—————————————————“舵角多少”“Port/Starboard rudder a bit sluggish”—————————“左/右舵有点迟缓”“Meet her (the wheel)”———————————————“压舵”按航向(罗经)操舵舵令:“Steer 150°”———————————————————“走150度”“Course 275°”——————————————————“走275度”“steer one eight two”————————————————“操182度”“Steady on one eight two”——————————————“把定在182o”“Course again”——————————————————“航向复原”“What course?”——————————————————“航向多少?”“Are you on your course?”——————————————“你在航向上吗?”按导标操舵舵令:“Heading to the buoy”————————————————“对准浮标走”“Keep straight to the lighthouse”————————————“对准灯塔走”“Keep to middle of channel”—————————————“保持在航道中央走”“Leave the buoy on the starboard /port side”———————“把浮筒放在右/左边”“Middle the two buoys”———————————————“向两个浮筒中间走”“Steer on …buoy/…mark/…beacon”————“对着……浮标/……物标/……立标行驶”三、操舵工作要领船舶在航行中,指挥人员根据航行的需要,对舵工下达舵令,由舵工根据舵令进行操舵,以控制船舶的航行方向。
第五章 操舵

第五章操舵作为值班水手,对驾驶台的各种航行设备应该有清楚的了解,并且必须能够操作各种允许水手操作的设备。
第一节操舵目前海上的操舵系统一般都是集成式的即一套操舵设备包含了几种操舵方式,它们之间由开关进行转换。
一、随动操舵方式1、舵角指示器2、标准罗经3、舵角与航向的关系(1)航向(2)航向二、手柄操舵1、应急操舵方式手柄操舵方式又称应急操舵方式,它同样也是一种手动操舵方式,其控制系统是由手柄直接控制继电器是舵机转动的装置。
2、应急操舵须知(1)手操舵失灵时,值班驾驶员应立即(命令)改为应急操舵,使用磁罗经航向操舵;并迅速通知电机员、大管轮并报告船长。
(2)驾驶台应急操舵装置失灵时,值班驾驶员应做到以下几点:①派舵工迅速到舵机房进行应急操舵;②在交通繁忙区立即停车。
③通知大管轮、电机员立即到舵机房协助舵工。
④唤请船长上驾驶台指挥。
⑤用有线电话或手持对讲机或话筒指挥舵工操舵。
⑥请船长增派一名舵工协助操舵。
⑦应急操舵生效后,立即用车舵控制航向和船位。
(3)舵机房应急操舵①将控制箱选择按钮由“驾驶台”切换到“舵机房”,即可用手柄进行应急操舵;②用对讲机或电话与驾驶台联系,听从驾驶台指挥。
③用舵工应急操舵手柄处的舵角指示器和航向分罗经协助操舵。
④若操舵装置全部失灵,应迅速倒车、停车,就就地抛锚;若为深水区,应现显示失控信号,并警告附近船只。
三、自动操舵方式自动操舵方式又称自动舵。
提示根据罗经的航向信号来控制舵机自动地使船舶保持在给定航向上的操舵控制装置。
1、操舵方式转换2、自动多使用须知(1)权限:船长应根据航道、海面、气象等条件决定是否使用自动舵,船长不在驾驶台时,由值班驾驶员决定使用自动多的时机。
(2)禁用:进出港口,航经狭水道、分道通航区、交通繁忙区、锚地、危险航道、能见度小于5海里的区域,避让、改变航向、追越时不得使用自动舵。
(3)机动操作:加强了望,需要激动操作时,应距他船5海里处改为手动舵。
手操舵时间较长时,应由两名舵工轮流操舵,并应监督舵工操舵的正确性。
应急舵操作说明

应急舵操作说明一、引言应急舵是一种在紧急情况下使用的船舶系统,可以帮助船舶在紧急情况下采取相应的措施,以确保船只和人员的安全。
本文档将详细介绍应急舵的操作步骤和注意事项,以帮助船员们快速准确地应对突发情况。
二、启动应急舵系统的准备工作1. 确保应急舵系统处于正常工作状态。
在船舶出发前,需要对应急舵系统进行检查,并确保其处于正常工作状态。
2. 熟悉应急舵系统的操作方式。
在紧急情况出现时,船员需要迅速准确地操作应急舵系统,因此在平常航行中,应熟悉其操作方式,准确掌握相应的控制手柄位置和操作方法。
三、应急舵操作步骤1. 迅速切换到应急舵操作模式。
当紧急情况发生时,船员需要在最短时间内切换到应急舵操作模式。
根据不同船舶型号的设计差异,可能有多种方式切换,但一般情况下,需要操作相应的开关或按钮来实现。
2. 手动控制船舶方向。
在应急舵操作模式下,船员需要使用手柄来手动控制船舶的方向。
手柄通常位于船舶驾驶台的中央控制台上,操作时需要紧握手柄并转动,以使船舶偏航。
注意事项:- 在手动控制船舶方向时,需要根据实际情况把握舵舺的转动幅度,避免过度偏航或过于剧烈的舵动。
- 必须始终保持警觉,并及时观察船舶的反应。
根据船舶的反应,船员可能需要适时调整手柄的转动角度,以保持船舶的平稳行驶。
四、应急舵操作的注意事项1. 紧急情况下的应急舵操作时间非常宝贵,必须迅速作出反应。
船员在操作应急舵系统时,要尽可能保持冷静,在准确操作的同时,不要因过度紧张而导致失误。
2. 维护良好的沟通与团队合作。
紧急情况通常需要整个船员团队的紧密协作,包括驾驶船舶的船员、安全人员和通讯人员等。
在应急舵操作过程中,要及时传递信息、协调行动,确保大家的安全。
3. 在航行中定期检查应急舵系统。
为了保证应急舵系统的正常工作,船员们应定期检查其操作性能和机械状况,并及时修复或更换有问题的部件。
五、总结应急舵操作对于船舶在紧急情况下的航行安全至关重要。
熟悉并掌握应急舵操作步骤和注意事项,可以帮助船员们在紧急情况下做出迅速准确的反应,最大程度地减小事故风险。
快艇自动舵的操作方法
快艇自动舵的操作方法快艇自动舵是一种非常方便、实用的设备,可以帮助船员自动控制船艏或船艉的方向,增强了船只的稳定性和安全性。
自动舵的操作方法包括以下几个方面:1. 准备工作在使用自动舵前,需要按照设备说明书正确安装自动舵控制器和传感器等外设,并与船体电子设备等连接,配置好相关参数。
同时,需要在船艏或船艉安装自动舵马达或舵机,以便实现自动控制。
2. 开启自动舵开启自动舵前,需要检查自动舵的设置是否正确,包括控制模式、船速限制、船舶类型、误差范围等,确保设备处于正常工作状态。
然后按下设备上的“开”或“自动”按钮,激活自动舵工作。
3. 设定目标角度或航迹在开启自动舵后,需要设置船艏或船艉的目标角度或航迹。
可以通过相应的旋钮或按钮进行调整,也可以输入数值来进行设置。
目标角度指的是船艏或船艉与航向线的夹角,可以根据实际情况进行设置,一般建议在10度以内。
航迹指的是船舶的航向,可以根据海图或GPS导航等设备确定。
4. 调整灵敏度和响应速度在使用自动舵时,需要根据航行情况进行灵敏度和响应速度的调整。
灵敏度指的是自动舵设备对方向变化的敏感程度,可以根据海况、风速等因素进行调整。
响应速度指的是自动舵响应指令的速度,一般建议设置在适当的范围内。
5. 监控工作状态在自动舵工作时,需要始终监控自动舵的工作状态,确保设备处于正常工作状态,并及时调整设置。
同时,需要注意船艏或船艉的方向,以免发生碰撞或其他意外事故。
总的来说,快艇自动舵的操作方法比较简单,需要进行正确的安装和配置,以及按照要求进行设置和监控工作状态。
在实际使用中,可以根据实际情况进行适当的调整,以保证船体的稳定性和安全性。
舵机应急操作程序

舵机应急操作程序1适用范围:本操作程序适用于我轮在舵机房进行应急操舵。
2当驾驶台各种操舵方式发生故障时,立即转到舵机房进行应急操舵。
2.1报告船长。
2.2将自动操舵仪上的“机组选择”旋钮转到“停止”位。
2.3由值班驾驶员或值班水手(或船长指定人员)到舵机房操作。
2.4开通驾驶台至舵机房通讯传达命令。
3舵机房应急操舵有三种方式:3.1手柄操舵:3.1.1将#1或#2(或#1&#2)机组控制箱上的“操舵地点选择”旋钮转到“舵机房位”,机组起动。
3.1.2用舵机房自动操舵仪简易操作台上的手柄操舵。
3.2顶动电磁阀操舵:3.2.1将#1或#2(或#1&#2)机组控制箱上的“操舵地点选择”旋钮转到“舵机房”位,机组起动。
3.2.2按舵令用“T”字形销顶动相应机组付泵上的电磁阀端孔,即可操舵。
3.3手轮操舵:3.3.1将#1&#2机组控制箱上的“操舵地点选择”旋钮转到“停”位。
3.3.2将#1,#2伺服油缸传动杆插销脱开。
3.3.3将销A插入“应急”操舵位置(如示图)。
3.3.4将#1或#2(或#1&#2)机组控制箱上的“操舵地点选择”旋钮转到“舵机房”位,机组起动,按舵令操纵手轮即可操舵。
4.1当液压系统管路发生故障时,按下表中“应急(1台泵使用)”的方法来转换阀和泵,然后可按3.1或3.2或3.3的方式来操舵。
4.2舵机在正常运转中应经常检查主油箱油位(大于1/2油位镜)油温(小于80℃)付油箱油位,舵承摩擦环油槽油位,舵柱润滑牛油杯常注牛油,如发现异常,立即报告值班轮机员。
———摘自安平2轮QSMS补充文件操舵轮装置示意图艏注意:121.into take Position “FOR2.。
2-2-8操舵基本方法与标准舵令.

八、舵令及操舵基本方法
14. 只按偏航角大小来操舵的自动舵:Ⅰ、比较直 观;Ⅱ、能克服偏航角速度;Ⅲ、航向稳定较快; Ⅳ、 航迹成“S”曲线,精度较差 A. Ⅰ、Ⅱ B. Ⅱ、Ⅲ C. Ⅲ、Ⅳ D. Ⅰ、Ⅳ 15. 按《规范》要求,操舵装置控制系统的电源 供应发生故障时应在______发出能视听的警报。 A. 舵机室 B. 驾驶室 C. 机舱 D. A+B+C均可 16. 自动舵操舵台面板上比例调节旋钮是根 据_____调节的。 A. 天气状况 B. 偏舵角与偏航角比例 C. 偏航惯性 D. 单侧偏航大小 17. 航迹舵正常工作的关键,取决于连续输入的: A. 船舶速度精确值 B. 风流压精确测定值 C. 船位精确数据 D. 船舶航程数据 答案:14.D 15.D 16.B 17. C
八、舵令及操舵基本方法
8. 操舵时,当发现罗经基线偏在原定航向刻度左 边时,这表示: A、船首偏在原航向左边,应操左舵 B、船首偏在原航向右边,应操右舵 C、船首偏在原航向左边,应操右舵 D、船首偏在原航向右边,应操左舵 9. 把定操舵是指: A、将舵轮把定不变 B、保持当时航向不变 C、保持当时转出舵角不变 D、将舵转回至零位 10. 自动舵的比例调节旋钮(舵角调节)的调节: Ⅰ、 重载时调大些;Ⅱ、轻载时调大些;Ⅲ、如部分舵叶露 出水面时应调大些;Ⅳ、海况恶劣调大些 A. Ⅰ、Ⅲ、Ⅳ B. Ⅱ、Ⅲ、Ⅳ C. Ⅰ、Ⅲ D. Ⅱ、Ⅳ 答案:8.C 9.B 10.B
八、舵令及操舵基本方法
5)舵工要严格遵照舵令操舵,未得到舵令 不能任意改变航向。还必须及时复述和报告执行 情况,如有疑问要及时提醒,以防发错或听错 舵令乃至操错舵角,值驾与舵工要密切配合。 2. 基本方法 1)按舵角操舵:在下达新的舵令前,不得 任意变动舵的位置,进出港和靠离泊是通常采用 按舵角操舵;
八、舵令及操舵基本方法
八、舵令及操舵基本方法
1. 在比例 - 微分舵的基础上增加积分环节项的
目的 是:
A 、克服因风流或螺旋桨不对称而产生的恒值
干扰作用
B 、把舵角指示误差累积起来
C 、使船舶的追随性变好
D 、使船舶的旋回性变好
2. 从随动操舵转换为自动操舵前,应注意:
Ⅰ 、先将压舵及自动改向调节旋钮置于零位;Ⅱ、
八、舵令及操舵基本方法
一)标准舵令 二)操舵工作要领和基本方法 1. 操舵工作要领及注意事项 1 )船舶在航行中,值驾根据航行的需要,对
舵 工下达舵令,由舵工根据舵令进行操舵,以控制船 舶的航行方向; 2 )值驾下达舵令后,应考虑到船舶在各种不
同 情况下的应舵性能和舵工的操舵水平,所下达的舵 令应确切,明了和清楚,如遇舵工复诵舵令错误或 操作不当,应立即予以纠正,舵工的报告也予以确 认;
后 顺序一般为:左 / 右舵 ××— 回舵或回到左 / 右舵 ××— 正舵—把定,然后再按实际需要下达新的 舵令组。除特殊情况外,不应下达左 / 右舵 ×× 直 接到右 / 左舵 ×× 的舵令;
八、舵令及操舵基本方法
5 )舵工要严格遵照舵令操舵,未得到舵令 不能任意改变航向。还必须及时复述和报告执行 情况,如有疑问要及时提醒,以防发错或听错 舵令乃至操错舵角,值驾与舵工要密切配合。 2. 基本方法 1 )按舵角操舵:在下达新的舵令前,不得 任意变动舵的位置,进出港和靠离泊是通常采用 按舵角操舵;
八、舵令及操舵基本方法
2 )按罗经操舵:如转向角超过 30° ,可用 10°-15° 舵角,如转向角小于 30° ,则宜用 5°10° 舵角;当罗经基线偏在原航向刻度的左边 时,表示船首已偏到原航向的左边,应操相反 方向的小舵角(右舵, 3°—5° 即可),使船首 返回原航向,纠正时要反应快,用舵快和回舵 快,船首总是固定一侧偏转时,采用一适当的 方向舵角来消除这种偏转,习惯称为压舵; 3 )按导标操舵:在近岸航行时,特别是在 狭水道或进出港时,经常利用船首对准某个导标 航行。
紧急操舵程序

緊急操舵程序
1.集合相關人員到達舵機間,準備就位後用舵機間的電話同駕駛台聯繫.
2.駕駛台接到電話後將自動舵面板SYSTEM開關切換到OFF(中間位置),然後將切換開關
從AUTO到HAND位置.完成後同舵機間聯繫.
3.舵機間將液壓舵機舵角首先放置在中間”0”度位置(防止復位後,舵角無法復原造成偏離).
4.將舵機間電源面板上NO1,或NO2,使用中的自動小馬達的電源關閉.( 防止人員在手動
操舵過程中因自動電源漏電而觸電).
5.將隔離閥(NO1,或NO2,)的紅色小桿往內推螺絲帽鎖住(假設,NO1,或NO2自動舵失靈).
6.將鎖緊螺栓插入緊急操作柄的孔內所住.
7.上述準備工作完成後,用對講機聯繫駕駛台,駕駛台發出舵令,PORT 5°10°,MIDSHIP
STARBOARD 5°,10°.一切正常後舵角返回對準0°.返回以上操作步驟,6-5-4-2.
8. 操舵完畢.
台塑明善輪。
舵机的使用方法

舵机的使用方法
舵机是一种常见的电机,它可以控制机器人、模型车、飞机等设备的运动方向和角度。
舵机的使用方法非常简单,只需要按照以下步骤进行操作即可。
第一步,连接电源和控制器。
舵机需要接受电源供电,一般使用直流电源,电压范围为4.8V-6V。
同时,舵机还需要连接控制器,控制器可以是单片机、遥控器等,用于控制舵机的运动。
第二步,设置舵机的初始位置。
在使用舵机之前,需要将舵机的初始位置设置为中心位置,这样可以保证舵机在运动时不会出现偏差。
设置初始位置的方法是将舵机连接到控制器上,然后将控制器的输出信号设置为中心位置,即舵机不运动的位置。
第三步,控制舵机的运动。
在设置好初始位置后,就可以控制舵机的运动了。
控制舵机的运动需要通过控制器来实现,控制器会向舵机发送控制信号,舵机根据信号的大小和方向来运动。
舵机的运动范围一般为0-180度,可以根据需要进行调整。
第四步,调整舵机的运动速度。
舵机的运动速度可以通过控制器来调整,一般可以设置舵机的运动速度和加速度。
调整舵机的运动速度可以使其更加平稳,避免出现抖动或者过快的运动。
第五步,保养舵机。
舵机在长时间使用后,可能会出现故障或者损坏,因此需要进行定期保养。
保养舵机的方法包括清洁舵机、润滑
舵机、检查舵机的连接线等。
舵机的使用方法非常简单,只需要按照以上步骤进行操作即可。
在使用舵机时,需要注意安全问题,避免出现电路短路、过载等情况。
同时,还需要根据实际需要进行调整,使舵机的运动更加精准、平稳。
船舶行业舵轮使用说明书

船舶行业舵轮使用说明书一、前言本使用说明书是为了指导船舶行业相关从业人员正确使用舵轮,提供必要的操作技巧和安全注意事项,以确保船舶的操纵安全和航行顺利。
二、舵轮概述舵轮是船舶操纵系统的核心组成部分,用于控制船舶的转向机构。
舵轮的操作直接影响船舶的转向灵敏度和航行稳定性。
三、舵轮操作指南1. 操作前准备:在操作舵轮之前,确保以下几点:- 确保船舶已停稳且没有其他危险情况;- 检查舵轮系统是否正常工作;- 确认舵轮使用区域内的工作环境安全。
2. 舵轮操作步骤:a) 将手放在舵轮表面的把手上,并确保握持稳固;b) 向左或向右转动舵轮,控制船舶的转向方向;c) 根据需要,调整舵轮角度以获得所需的转向程度;d) 当需要船舶保持直线航行时,将舵轮回到中立位置;e) 任何时候都应该平稳地操纵舵轮,避免过度转动或突然变换方向。
3. 安全注意事项:a) 在操作舵轮时,始终专注于船舶的操纵,保持警觉;b) 遵守船舶操作规程和相关法律法规;c) 注意舵轮周围的工作环境,确保无障碍物阻挡;d) 定期检查舵轮系统的工作状态,确保其正常运行;e) 遇到异常情况或紧急情况时,应立即采取相应措施,并向相关人员报告。
四、常见问题及解决方法1. 舵轮僵硬或转动不灵活:可能原因:- 舵轮系统润滑不足;- 舵轮机构损坏;- 舵轮连接部件松动。
解决方法:- 定期对舵轮系统进行润滑保养;- 检查并修复损坏的舵轮机构;- 检查并紧固舵轮连接部件。
2. 舵轮角度不准确:可能原因:- 舵轮系统校准不准确;- 舵轮传感器故障。
解决方法:- 联系专业人员进行舵轮系统校准;- 检查并修复故障的舵轮传感器。
3. 舵轮操作困难或不稳定:可能原因:- 舵轮系统异常;- 转向机构损坏;- 操纵机构松动。
解决方法:- 检查舵轮系统,并进行必要的修复;- 检修转向机构;- 紧固操纵机构。
五、后记舵轮作为船舶行业中不可或缺的操纵工具,对船舶的安全运行起着重要作用。
操舵部分

常用的英语舵令及其含义举例如下:需要以固定的舵角改向时,发令:port(stbd.) five/twenty 舵工复诵后操舵,待舵稳定在该舵角时报告:wheel port(starboard) five/twenty需要用满舵时,发令:hard a port(stbd.) 舵工复诵后操舵,待舵操到该满舵时报告:wheel hard a port(starboard)需要改向至指定航向时,发令:course 090 degrees 舵工复诵后操舵,待航向稳定在该角度时报告:course on 090需要小舵角修正航向时,发令: 3 degrees to port(stbd.) 舵工复诵后操舵,待船艏向稳定在要求的角度时报告:course on ×××(degrees)需要恢复原航向时,发令:course again 舵工复诵后操舵,待船艏向恢复到原航向时报告:course on ×××(degrees)需要使舵角迅速回到0°时,发令:midships 舵工复诵后操舵,待舵角到0°时报告:wheel’s amidships 需要使舵角逐渐回到0°时,发令:ease helm 舵工复诵后操舵,待舵角逐渐到0°时报告:wheel’s amidships 需要使舵角逐渐回到指定角度时,发令:ease helm to ×××(degrees) 舵工复诵后操舵,待舵角逐渐到指定角度时报告:wheel’s eased on port(stbd.)×××需要将船艏向稳定在发令时航向时,发令:stesdy 舵工复诵后操舵,待航向稳定在要求的角度时报告:steady欲提醒舵工不要左右偏转时,发令:Nothing to port(stbd.). or Mind your rudder. 舵工回答:Yes, sir. 并注意欲询问当时的航向,发令:What’s heading? 舵工回答:Course ×××(degrees)欲询问当时的舵角,发令:What’s your rudder? 舵工回答:Whees port(stbd.) ×××(degrees)欲询问当时的舵效,发令:How does the rudder answer? 舵工可回答:Very slow/good. or No answer.?2.9本船的操舵系统为Raytheon的电动液压式,其中自动舵为Raytheon的AP01-S01的Nautopilot NP2010型。
水手压舵把定技巧

水手压舵把定技巧水手压舵把定是指通过舵将船舶转向特定的方向。
对于水手而言,掌握好舵的使用技巧至关重要。
下面是一些相关的把定技巧和参考内容。
一、正确的把定姿势1. 坚持站立:水手应该站在舵杆旁边而不是坐在舵杆上,以便更好地掌握舵杆的位置和力度。
2. 双手握稳:将双手放在舵杆上,保持握稳,同时确保手指可以自由活动,不受限制。
3. 轻松身体姿态:身体要放松,不要用力过度,保持平衡,确保舵杆操作的灵活性和准确性。
二、把定技巧1. 注意舵的动作:水手应该对舵杆的动作非常敏感,以便在需要时及时作出反应。
舵杆的动作应该准确、迅速、灵活。
2. 温和的操作:船只通常比较大且笨重,为了避免剧烈的转弯和过大的力度,水手应该进行温和的操作,尽量避免船身和舵的过度运动。
3. 知道舵的作用:水手应该了解不同舵的作用,例如左舵将把船转向右边,右舵将把船转向左边。
熟悉这些基本知识有助于更好地掌握舵的使用技巧。
三、注意事项1. 注重风向和海流:在操作舵时,水手应该密切关注风向和海流的变化。
风向和海流将对船的转向产生影响,水手需要根据这些因素进行相应的舵杆操作。
2. 与其他船只保持安全距离:在船只相互接近的情况下,水手需要保持安全距离,并避免与其他船只发生碰撞。
在紧急情况下,正确的舵杆操作可以帮助水手躲避潜在的危险。
3. 练习和经验:掌握好舵的使用技巧需要长时间的练习和积累经验。
水手应该经常进行舵杆操作的练习,提高舵杆操作的准确性和灵活性。
四、参考内容1. 《船舶操纵技能手册》:这本手册详细介绍了船舶操纵的一些基本技能,包括舵的使用技巧和操作方法。
2. 《航海教程》:这本教程对舵操作进行了系统的讲解,包括舵的作用、舵杆的使用方法以及注意事项等。
3. 《船舶操纵实务》:这本书对船舶操纵的实际操作进行了深入介绍,其中包括了舵的使用技巧和把定方法。
4. 相关视频教程:在互联网上可以找到一些关于船舶操纵和舵操作的视频教程,通过观看这些教程,可以更直观地了解舵的使用技巧和把定方法。
舵机操作步骤
舵机操作步骤(TOKYO KEIKI)
一. 准备
1.确定在操作台子上的操作方式开关在手动位置
2.确定位于舵机间的马达的电源开关被设定在对应位置上
二. 手操舵
1.当手操舵的准备已经完成就可以开始。
船用罗经盘能是掌舵当看舵的时候命令指示器
2.当在操作选择开关上有变更从手位置到任何其他的位置的时候。
设定舵角指示器的指
针在零的位置然后将开关转向手位置。
三. 自动舵
1.搬动,转换航向设定手柄,匹配他的位置到船首线上
2.将操作 (掌舵) 选择者开关转向自动舵位置。
四. 随动舵
1.将操作选择者开关转向随动位置
2. 仅仅当随动开关被转向左或者右,并保持在这个位置的情况下,舵才会转向。
随动开
关返回到中心位置,舵仍然保留在原来位置。
五. 紧急操舵(在舵机间)
查阅操舵装置的说明书
【XING Y AO】。
操舵要领

4).不用急舵。平时尽量不用急舵或少用急舵,以免游艇旋转惯性过大难以控制,同时也防止损坏舵设备。
5).按导标操舵。
6).大风浪中航行。游艇左右摇摆和前后颠簸很大,航向很难稳定,操舵更应机敏耐心,细心观察综合影响的结果,掌握规律。例如,知道了艇首将要向右偏时,应先用左舵抵制,当这种偏转影响将要消失时,应及时将舵回到正舵位置,使舵所产生的作用力上正好与风浪影响相抵消,否则,等到艇首已经开始偏转时再用舵就迟了。
1).要熟练掌握罗经基线与艇首航行方向的关系。罗经基线指示的刻度盘上度数就是航向。当罗经基线偏离到原定航向刻度的右边时,表明艇首已偏到原航向的右边,应操相反方向的小舵角(左舵,3°~5°即可)进行修正,使艇首(罗经基线)返回原航向。注意不可用大舵角,以免游艇的旋转惯性影响使艇难以稳定而成“S”形航行。
7).操舵时要有高度的责任感。注意力要集中,时刻注视罗经航向,始终保持艇在航向上。
8).努力掌握本艇的性能。如左舵与右舵、空载与满载、强风与急流、浅水与波浪、顶流与顺流等情况下舵来得快与慢,旋转惯性的大与小等。
9).当航行于狭水道中不得骤然使用满舵,以防产生过大的旋转惯性不易停住。
2).按航向操舵。当接到驾驶员变换航向口令时、应根据变更航向的幅度的大小和航速的快慢来决定操舵角的大小。航向变动的幅度小、航速快,可操小舵角;反之,则操较大舵角。用舵后,游艇开始转向,此时可根据罗经基线和刻度盘的相对转动情况,把握游艇回转时的角速度。当游艇逐渐接近新航向时,应根据游艇惯性和回转角速度的大小,按经验提前回舵,必要时可向相反方向压一舵角,以防游艇回转过头,这样游艇就能较快地进入并稳定在新航向上。
10).当航行中做人幅度变换航向时,宜逐渐改变舵角,以防晃倒乘客或发生意外。
应急舵操作说明

应急舵及操舵操作说明
应急舵操作说明
1.舵机房内,将操作地点选择开关(左、右舵机控制箱各一只)转至“舵机舱”
位置
2.给舵机操纵系统和动力机组供电
3.用简易操舵台进行操纵,使用操纵手柄控制舵角
4.联系方法,使用驾驶台-舵机房直通电话,或VHF与驾驶台联系
驾驶台操舵
1.舵机房内,将操作地点选择开关(左、右舵机控制箱各一只)转至“驾驶台”
位置
2.给舵机操纵系统和动力机组供电
3.选择操舵台上的操纵形式,进行操纵
自动舵操作说明
1.自动舵在工作时,一、二号舵号请勿同时使用,并且经常转换使
用舵机
2.每班至少试验一次自动舵的手动操作
3.在通航密度大的海区、狭水道航行、进出港航行、能见度受限等
情况下以及在其他航行危险时,应立即转至人工操舵
4.转换手动操舵或自动操舵必须值班驾驶员操作或在其监控之下进
行。
舵令及操舵方法和要领
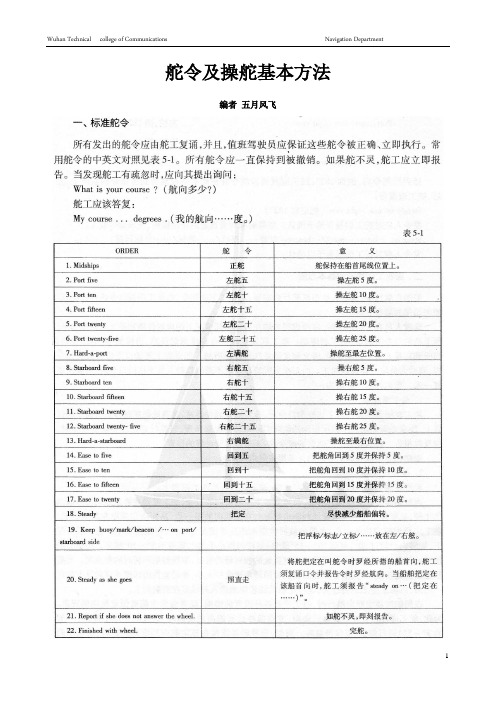
舵令及操舵基本方法编者五月风飞舵令的发令、复述及报告方法见下表:二、操舵要领和基本方法操舵工作要领和基本方法船舶在航行中,驾驶人员根据航行的需要,对舵工下达舵令,由舵工根据口令进行操舵,以控制船舶的航行方向。
驾驶人员在下达口令时,应考虑到船舶在各种不同情况下的应舵性能和舵工的操舵水平。
所下达的口令应确切、明了和清楚。
舵工在操舵时应有高度的责任感,思想集中、动作准确、当听到驾驶人员下达舵令后,应立即复诵并执行以防听错。
如遇舵工复诵口令错误或操作不当,驾驶人员应立即加以纠正。
舵工在未听清口令或不理解驾驶人员下达的口令时,可要求重复一遍。
操舵的基本方法为:1.按舵角操舵舵工在听到驾驶人员下达舵角口令后,应立即复诵并迅速、准确地把舵轮转到所命令的位置上,注意查看舵角指示器所指示的舵叶实际偏转情况和角度,当舵叶到达所要求的角度时,应及时报告。
在驾驶人员下达新的舵令前,不得任意变动舵的位置。
2.按罗经操舵船舶在海上航行时,大多按罗经操舵,使其保持在所需的航向上。
当船舶需要改变航向,驾驶人员可直接下达新航向的口令,舵工复诵并将新航向与原航向作比较,从罗经刻度上可清楚地判断出新航向在原航向的哪一边,从而决定采取左舵或右舵。
舵工应根据转向角的大小、本船的旋回性能和海况等情况,决定所用舵角大小。
在一般情况下,如转向角超过30º,可用10 º~15 º舵角;如转向角小于30 º,则宜用5 º~10º舵角。
用舵后船舶开始转向,此时可根据罗经基线和刻度盘的相对转动情况,掌握船舶回转时的角速度。
当船舶逐渐接近新航向时,应根据船舶惯性和回转角速度的大小,按经验提前回舵并可向反方向压一舵角,以防止船舶回转过头,这样船舶就能较快地进入并稳定在新航向上。
在船舶按预定航向航行时,由于受到各种因素的影响,经常会发生偏离预定航向的现象。
为此,舵工应注视罗经刻度盘的动向,发现偏离或有偏离的倾向时,应及时采用小舵角(一般为3 º~5 º)进行纠偏,以保持航向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Wheel is port five 五度左 Wheel is port ten 十度左 Wheel is port fifteen 十五度左 Wheel is port twenty 二十度左 Wheel is port twenty-five 二十五度左 Wheel is port thirty 三十度左 Wheel is hard a port 满舵左 Wheel is starboard five 五度右 Wheel is Starboard ten 十度右 Wheel is Starboard fifteen 十五度右 Wheel is Starboard twenty
航摆角参数用于调节航向控制器的灵敏度。值越大,灵敏度越低。一般情况下,海况恶劣时,设 置值较大。 2) Rudder: 舵角数值 舵角数值用于实现航向控制器的等比增益。值越大,航向改变时的用舵舵角越大。舵角设置值过 大,会导致船舶失衡;过小,船舶转入新航向很慢。海况恶劣时,设置值较大。 3) Counter Rudder: 反舵角数值
3
Wuhan Technical Navigation Department
college
of
Communications
小、本船的旋回性能和海况等情况,决定所用舵角大小。在一般情况下,如转向角超过 30º,可用 10 º~ 15 º舵角;如转向角小于 30 º,则宜用 5 º ~10 º舵角。用舵后船舶开始转向,此时可根据罗经基线和刻度盘的相对转动情况,掌握船舶回转时的角速 度。当船舶逐渐接近新航向时,应根据船舶惯性和回转角速度的大小,按经验提前回舵并可向反方向压一 舵角,以防止船舶回转过头,这样船舶就能较快地进入并稳定在新航向上。 在船舶按预定航向航行时,由于受到各种因素的影响,经常会发生偏离预定航向的现象。为此,舵工 应注视罗经刻度盘的动向,发现偏离或有偏离的倾向时,应及时采用小舵角(一般为 3 º ~5 º)进行纠 偏,以保持航向。例如,当罗经基线偏在原定航向刻度的左边时,这表示船首已偏到原航向的左边,应操 相反方向的小舵角(右舵,3 º ~5 º即可) ,使船首(罗经基线)返回原航向。纠偏时要求反应快、用舵 快和回舵快。 当发现船首总是固定一侧偏转时(通常是船舶受单侧风浪、潮流或由于积载不当,或由于船型、推进 器不对称等恒值干扰力矩的影响所引起) ,应采用一适当的反向舵角,来消除这种偏转,习惯称为“压舵” 。 所用舵角大小,可通过实践的方法来确定,通常先操正舵,查看船着向哪一边偏转,然后操一反向舵角, 如所用舵角大小,船首仍将偏向原来的一侧;舵角太大,则反之。反复调试所采取的舵角,直至能将船首 较稳定地保持在预定航向上。 3.按导标操舵 在近岸航行时,特别是在狭水道或进出港时,经常利用船首对准某个导标航行。舵工 根据驾驶人员所指定的导标,操舵使船首对准该目标,并记下航向度数,报告给驾驶人员。如发现偏 离,立即进行纠正,并注意检查航向有无变化,如有变化,舵工应及时提醒驾驶人员是否存在风流压。 4.大风浪中操舵 由于船舶在大风浪天气下左右前后摇摆颠簸剧烈,航向很难稳定。此时,应由有经验的人员操舵,应 细心观察风流影响的综合结果,要提前回舵或压舵。 为便于指挥或操舵,无论采用哪种操舵方法,驾驶人员或舵工都应掌握船舶在不同受载,不同风浪水 流和水深、不同车速等情况下的舵性,熟悉舵设备各开关和旋钮的作用。
Order 发令
Midship 正舵 Port five 左舵五 Port ten 左舵十 Port fifteen 左舵十五 Port twenty 左舵二十 Port twenty-five 左舵二十五 Port thirty 左舵三十 Hard a Port 左满舵 Starboard 右舵五 Starboard 右舵十 Starboard 右舵十五 Starboard twenty fifteen five ten Midship 正舵
Wheel is Starboard twenty-five 二十五度右 Wheel is Starboard thirty 三十度右 Wheel is hard a starboard 满舵右 Wheel is port (starboard) ten 十度左(右) Course 130 steady 航向 130 把定 Nothing to port (starboard) 不要偏左(右)
二、操舵要领和基本方法
操舵工作要领和基本方法船舶在航行中,驾驶人员根据航行的需要,对舵工下达舵令,由舵工根据口 令进行操舵,以控制船舶的航行方向。 驾驶人员在下达口令时,应考虑到船舶在各种不同情况下的应舵性能和舵工的操舵水平。所下达的口 令应确切、明了和清楚。舵工在操舵时应有高度的责任感,思想集中、动作准确、当听到驾驶人员下达舵 令后,应立即复诵并执行以防听错。如遇舵工复诵口令错误或操作不当,驾驶人员应立即加以纠正。舵工 在未听清口令或不理解驾驶人员下达的口令时,可要求重复一遍。操舵的基本方法为: 1.按舵角操舵 舵工在听到驾驶人员下达舵角口令后,应立即复诵并迅速、准确地把舵轮转到所命令的位置上,注意 查看舵角指示器所指示的舵叶实际偏转情况和角度,当舵叶到达所要求的角度时,应及时报告。在驾驶人 员下达新的舵令前,不得任意变动舵的位置。 2.按罗经操舵 船舶在海上航行时,大多按罗经操舵,使其保持在所需的航向上。 当船舶需要改变航向,驾驶人员可直接下达新航向的口令,舵工复诵并将新航向与原航向作比较,从 罗经刻度上可清楚地判断出新航向在原航向的哪一边,从而决定采取左舵或右舵。舵工应根据转向角的大
Hard a Starboard 右满舵 Ease to ten 回到十度 Steady (course 130) 把定(航向 130) Nothing to port (starboard) 不要偏左(右) Finish with wheel 完舵
Finish with wheel 完舵
Change over the wheel , course 130 ,speed 13 knots ,sir. 现在交班,航向 130,速度 13 节,先生. Take over the wheel ,course 130,speed 13 knots,sir. 现在接班,航向 130,速度 13 节,先生 Auto—steering 自动舵 Hand steering 手动舵 NFU (None follow up) 应急舵
Reply 复诵
Midship 正舵
Report 报告
Port five 左舵五 Port ten 左舵十 Port fifteen 左舵十五 Port twenty 左舵二十 Port twenty-five 左舵二十五 Port thirty 左舵三十 Hard a Port 左满舵 Starboard five 右舵五 Starboard ten 右舵十 Starboard fifteen 右舵十五 Starboard twenty
7
college
of
CommunBiblioteka cations6) Radius: 航迹保持时的参数设置 . 当船舶偏离计划航线 2*RADIUS 时, 发出偏离航线报警 . 当船舶 在 RADIUS~2*RADIUS 之间时,进行航迹调整. 7)Off Track 用于设置航迹控制时,航线偏离的报警门限 8) Track Control: 用于打开航迹控制,保证船舶沿计划航线运动.当船舶的横向偏差大于一定值时, 自动舵产生控制 系数进行偏差修整, 并确保平均偏差值为零. 一般情况下,横向偏差不超过 0.3 海里, 航向偏差不超过 30 度.
2
Wuhan Technical Navigation Department 右舵二十 Starboard twenty-five 右舵二十五 Starboard 右舵三十 thirty 右舵二十
college
of 二十度右
Communications
Starboard twenty-five 右舵二十五 Starboard thirty 右舵三十 Hard a Starboard 右满舵 Ease to ten 回到十度 Steady (course 130) 把定(航向 130)
输入的,还是通过磁罗经(Magnetic Compass)输入的, 绿灯亮,表明是电罗经航向同步模式, 红灯亮表明是磁罗经航向同步模式 � � 选择是航向控制(Course Control)还是航迹控制(Track Control) 设置航向控制时本船的航向 (1) 按 COURSE SET 按钮,显示相应的初值 (2) 旋转调节选钮,数字显示设置值的大小 (3) 按 PARA SET 按钮,航向设置值被确认 � 设置其它参数 如:设置 Yawing (4) 按 Yawing 按钮,显示相应的初值 (5) 旋转调节选钮,数字显示设置值的大小;按住该旋钮再旋转,调整步长大 (6) 按 PARA SET 按钮,设置值被确认 自动舵各参数的含义 1) Yawing: 航摆角
5
Wuhan Technical Navigation Department
college
of
Communications
3 自动舵操作
� � 用舵转换开关将舵的操作转换为自动舵方式(Auto Pilot ) 航向同步信号选择: 用“Magn/Gyro”可选择船舶实际航向信号是通过电罗经(Gyro Compass)
反舵角用于克服船舶回转时的惯性,和航向控制器的微分部件有关。反舵角设置值过大,船舶转 入新航向的速度很慢。过小,会导致船舶失衡。 4) Rudder Limit: 设定舵角限制 航向改变时的舵角变化量不会超过此值.
6
Wuhan Technical Navigation Department 5) Off Course: 用于设置航向偏离的报警门限
4
Wuhan Technical Navigation Department
college
of
Communications