刚柔耦合并联机器人动力学建模及仿真研究
机器人刚柔耦合动力学
机器人刚柔耦合动力学
机器人的刚柔耦合动力学是指在机器人的设计中考虑机体的柔性结构对动力学的影响,同时将刚性结构与柔性结构进行耦合,使机器人更加灵活、优化及能适应更多的任务。
机器人刚柔耦合动力学有两个重要的方面,一个是刚柔耦合建模,另一个是刚柔耦合
控制。
在建模方面,需要将机器人的刚性结构、柔性结构和任务环境建立相应的数学模型,以便用于控制设计和仿真验证。
在控制方面,需要将控制算法应用于机器人控制中,以更
好地实现机器人在复杂环境下的操作,同时考虑柔性结构的影响,提高控制性能。
刚柔耦合建模是指在机体的柔性结构和刚性结构之间建立相应的数学模型。
这个建模
过程需要考虑到机器人的各种复杂的运动方程,还需要考虑机器人在任务环境中的受力情
况以及相应的控制策略。
在建模过程中,需要采用一些数学工具,如变分法、多体动力学
以及有限元法等,以确保精准的建模和仿真。
在控制方面,针对机器人的刚柔耦合动力学建模,需要采用一些高级控制算法,如模
型预测控制、鲁棒控制以及优化控制等。
这些计算技术通常需要使用高性能计算技术来实
现快速计算和实时响应。
此外,在设计“柔软”机器人百年来,还采用了多种控制策略,
如逆动力学控制、反馈控制等,以实现更好的动作学习和运动控制。
总之,机器人的刚柔耦合动力学是机器人研究领域中非常重要的一部分。
通过应用现
代数学、物理及计算科学技术,可以实现机器人在复杂环境中的操作,具有更高的灵活性
和优化性能。
同时,还可以为机器人未来的发展和应用提供更多的潜在机会和支持。
机械系统中的刚柔耦合动力学分析

机械系统中的刚柔耦合动力学分析引言机械系统的刚柔耦合动力学分析是研究刚性部件和柔性部件耦合工作时的振动特性和动力学性能的过程。
刚柔耦合系统由刚性和柔性部件组成,其刚性部件具有高刚度和低振动特性,柔性部件则具有低刚度和高振动特性。
刚柔耦合分析在现代工程设计和制造中具有重要的作用,尤其是在飞行器、机器人、精密仪器等领域中的应用。
一、刚柔耦合动力学模型刚柔耦合动力学模型是描述该系统振动行为的数学模型。
该模型可以基于刚体动力学和弹性体动力学原理建立。
刚体动力学模型涉及质点、刚体的平移和旋转运动方程,弹性体动力学模型涉及刚体振动的波动方程和柔性部件的变形方程。
综合考虑刚体和弹性体的动力学模型,可建立刚柔耦合动力学模型,用于研究振动响应和动力学性能。
二、刚柔耦合系统的耦合方式刚柔耦合系统的耦合方式主要包括刚体与柔性部件的物理耦合和动力学耦合。
物理耦合是指刚体和柔性部件通过连接件(如螺栓、焊接等)实现的实体耦合,确保其共同工作。
动力学耦合是指刚体和柔性部件在振动过程中相互作用和影响。
物理耦合和动力学耦合的研究有助于理解刚柔耦合系统的振动特性和动力学行为,提高系统工作的稳定性和可靠性。
三、刚柔耦合系统的振动特性分析刚柔耦合系统的振动特性是研究该系统固有频率、模态形状和振型等振动性质的过程。
通过振动特性分析,可以确定系统的谐振频率和振型,为系统优化设计和振动控制提供依据。
常用的方法包括有限元分析、模态分析和振动测试等。
其中,有限元分析是一种基于数值计算的方法,可以模拟系统的振动响应,模态分析可以获得系统的固有频率和模态形状,振动测试可以直接测量系统的振动状态。
四、刚柔耦合系统的动力学性能分析刚柔耦合系统的动力学性能是研究该系统在外部激励作用下的响应和行为。
动力学性能分析主要包括动力学模态分析、频率响应分析和阻尼特性分析等。
动力学模态分析可以研究系统在特定工况下的振动行为和能量分布,频率响应分析可以研究系统在不同频率下的响应特性,阻尼特性分析可以研究系统的振动耗能和稳定性。
并联机器人的动力学建模与运动控制研究

并联机器人的动力学建模与运动控制研究近年来,随着制造业的发展和自动化程度的提高,机器人技术已经成为了各个领域的重点研究和应用。
其中,并联机器人由于其具有高精度、高刚度、高负载能力等优势,在生产领域得到了广泛的应用。
本文将探讨并联机器人的动力学建模和运动控制研究,以期更好地应用于实际生产,并促进未来的机器人技术的发展。
一、并联机器人的动力学建模动力学建模是机器人控制领域的一个基础问题,主要研究机器人在运动过程中的力、力矩和运动学关系,为机器人的控制提供一定的数学模型。
那么,在并联机器人中,动力学建模涵盖哪些相关知识点呢?1. 运动学模型:运动学模型研究的是机器人各个连杆之间的相对位置,以及运动学参数的确定。
在并联机器人中,其运动学模型较为复杂,因此需要研究者具备较高的数学能力。
2. 动力学模型:动力学模型研究的是机器人在空间中的力、力矩、速度和加速度等参数之间的关系。
在并联机器人中,主要涉及到弹性力矩、惯性力和摩擦力等参数,需要综合考虑多种因素。
3. 控制模型:控制模型研究的是机器人在运动过程中的控制程序,主要涉及到控制算法和控制器的研究与设计。
在并联机器人中,其控制模型需要兼顾准确性和实时性,因此需要具备一定的计算机技术和控制工程背景。
二、并联机器人的运动控制研究运动控制是机器人应用领域的重要研究方向,其目的是使机器人在空间中进行准确、快速、稳定的运动。
那么在并联机器人中,有哪些关键的运动控制技术呢?1. 逆运动学求解:在机器人运动控制中,逆运动学求解是一个基础问题。
它研究的是机器人各个关节的角度、速度和加速度之间的关系。
在并联机器人中,逆运动学求解需要考虑到各个执行器之间的耦合关系,因此需要进行较为复杂的数学计算。
2. 实时轨迹跟踪:在实际生产中,机器人需要能够实时地根据生产环境的变化进行轨迹跟踪。
在并联机器人中,实时轨迹跟踪需要考虑到控制算法的速度和计算精度,以及机器人的动力学参数。
3. 动力学控制:在并联机器人中,动力学控制是一项重要的技术。
大范围运动刚柔耦合系统动力学建模与仿真

大范围运动刚柔耦合系统动力学建模与仿真随着科技的不断发展,机器人技术在各个领域得到了广泛的应用。
机器人的运动控制是机器人技术中的一个重要研究方向。
在机器人的运动控制中,刚柔耦合系统动力学建模与仿真是一个重要的研究方向。
刚柔耦合系统是指由刚体和柔性结构组成的系统。
刚体是指具有固定形状和大小的物体,而柔性结构则是指具有一定弹性的物体。
刚柔耦合系统的动力学建模与仿真是指对这种系统进行数学建模和仿真分析,以便更好地理解和控制这种系统的运动。
在刚柔耦合系统的动力学建模中,需要考虑刚体和柔性结构之间的相互作用。
这种相互作用可以通过建立刚柔耦合系统的动力学模型来描述。
动力学模型可以用来预测系统的运动轨迹和响应。
在建立动力学模型时,需要考虑系统的质量、惯性、弹性和摩擦等因素。
在刚柔耦合系统的仿真分析中,可以使用计算机模拟的方法来模拟系统的运动。
计算机模拟可以帮助研究人员更好地理解系统的运动特性,并预测系统的响应。
在进行仿真分析时,需要考虑系统的初始状态、外部扰动和控制策略等因素。
刚柔耦合系统的动力学建模与仿真在机器人技术中具有广泛的应用。
例如,在机器人的运动控制中,刚柔耦合系统的动力学建模和仿真可以帮助研究人员更好地理解机器人的运动特性,并设计更有效的控制策略。
此外,在机器人的设计和制造中,刚柔耦合系统的动力学建模和仿真也可以帮助研究人员更好地理解机器人的结构和性能,并优化机器人的设计。
刚柔耦合系统的动力学建模与仿真是机器人技术中的一个重要研究方向。
通过建立动力学模型和进行仿真分析,可以更好地理解和控制刚柔耦合系统的运动特性,从而为机器人技术的发展提供有力的支持。
刚柔耦合动力学模型

刚柔耦合动力学模型刚柔耦合动力学模型是一种研究刚体与柔性物体相互作用的动力学模型。
刚体是指刚性物体,它们的形状不会被外力而改变,而柔性物体则是指能够被变形的物体,例如弹性绳、橡胶板等。
这种模型可以用于研究操纵机器人的运动过程,研究这些机器人如何与环境中的不同物体进行交互以及对物体的执行任务的影响等。
刚柔耦合动力学模型主要由两部分组成,一部分是刚体系统,另一部分是柔性物体系统。
在这种模型中,刚体与柔性物体之间的相互作用是通过接触力来传递的。
因此,一个合理的接触力模型是非常重要的。
接触力模型通常包括刚体表面的几何形状和载荷等参数,以及柔性物体的弹性和运动状态等参数。
其中,刚体表面的几何形状对接触力的大小和方向有着重要的影响。
而载荷参数则可以用来模拟外部施加在刚体上的力。
柔性物体的弹性参数可以用于计算物体在接触时的形变和应力等参数,而运动状态参数可以用于描述物体的形变和位置等变化。
为了能够建立一个准确的刚柔耦合动力学模型,需要采集大量的实验数据来估算模型的参数。
实验数据的采集与处理需要采用一系列的工具和技术,例如力传感器、电子显微镜、计算机视觉技术等。
通过使用这些工具和技术,可以获得物体的各种物理量,并根据这些物理量来建立相应的数学模型。
在实际应用中,刚柔耦合动力学模型可以用于研究机器人操作过程中的力学特性,以及机器人如何与各种材料和形状的物体交互。
例如,当机器人操作一个柔性物体时,由于物体的形状和弹性等特性,机器人需要以特定的方式施加力,并控制它的运动状态,以达到所需的效果。
总之,刚柔耦合动力学模型是研究刚体和柔性物体相互作用的重要工具,它可以用于研究机器人的操纵、环境中的交互和执行任务等。
其建立需要借助实验数据和数学模型来完成,因此需要采用一系列的工具和技术。
随着机器人技术的不断发展,刚柔耦合动力学模型也将得到更加广泛和深入地应用。
刚—柔耦合问题与空间多杆柔性机械臂的动力学建模理论研究
刚—柔耦合问题与空间多杆柔性机械臂的动力学建模理论研究一、本文概述随着现代机器人技术的发展,空间多杆柔性机械臂在航天、深海探索、精密制造等领域的应用日益广泛。
这类机械臂在运动中不仅呈现出刚体动力学特性,而且由于结构柔性,其动力学行为还受到弹性变形的影响。
对刚—柔耦合问题的深入研究,以及建立准确的空间多杆柔性机械臂动力学模型,对于提高机械臂的运动精度、稳定性和控制效率具有重要意义。
本文旨在探讨空间多杆柔性机械臂的动力学建模理论。
我们将回顾和梳理刚—柔耦合问题的基本概念和研究现状,分析现有动力学模型的优缺点及适用范围。
接着,我们将基于弹性力学、多体动力学和计算机仿真技术,建立一种综合考虑刚体运动和弹性变形的动力学模型。
该模型将能够更准确地描述机械臂在运动过程中的动力学行为,为后续的轨迹规划、控制和优化提供理论基础。
本文还将对所建立的动力学模型进行实验验证。
通过对比仿真结果与实验结果,评估模型的准确性和可靠性,并提出改进和优化建议。
我们期望通过本文的研究,能够为空间多杆柔性机械臂的动力学建模提供新的理论和方法,推动相关领域的技术发展和应用创新。
二、刚-柔耦合问题的基础理论刚-柔耦合问题涉及机械系统中刚性部分与柔性部分之间的相互作用和动力学特性。
在解决这类问题时,我们需要结合刚体动力学和弹性力学的基本理论,对系统的整体运动进行建模和分析。
刚体动力学是研究刚体在力和力矩作用下的运动规律的学科。
根据牛顿第二定律,刚体的运动可以通过建立运动方程来描述,其中包含了刚体的质量、惯性矩以及所受的力和力矩。
这些方程可以通过数值方法求解,得到刚体的位移、速度和加速度等运动参数。
弹性力学则关注物体在受到外力作用时发生的形变和应力分布。
对于柔性机械臂,其弹性形变会对整体运动产生影响,因此需要考虑其弹性特性。
在弹性力学中,物体的形变可以通过位移场来描述,而位移场满足弹性力学的基本方程,如平衡方程、几何方程和本构方程。
在刚-柔耦合问题中,我们需要将刚体动力学和弹性力学的基本理论相结合,建立系统的整体动力学模型。
轻型并联机器人柔体动力学建模分析及智能控制方法研究
《轻型并联机器人柔体动力学建模分析及智能控制方法研究》xx年xx月xx日•研究背景及意义•并联机器人研究现状•轻型并联机器人柔体动力学建模•轻型并联机器人智能控制方法研究目•实验与分析•结论与展望录01研究背景及意义轻型并联机器人在军事、航空航天、救援等领域具有广泛的应用前景。
针对轻型并联机器人的柔体动力学建模分析及智能控制方法研究具有重要的理论价值和实际意义。
1 2 3建立轻型并联机器人的柔体动力学模型,揭示其运动规律和特性。
针对轻型并联机器人的智能控制方法进行研究,提高其运动性能和适应性。
为轻型并联机器人的应用提供理论和技术支持,推动相关领域的发展。
02并联机器人研究现状并联机器人的定义并联机器人是一种具有多个并联机构的机器人,其每个并联机构都由一个或多个电机驱动,并且每个并联机构都可以独立控制。
并联机器人的特点并联机器人的结构紧凑,响应速度快,精度高,适用于高速、高精度的运动控制场合。
此外,并联机器人的负载能力较强,能够承受较大的外部力。
并联机器人概述目前,并联机器人的研究热点主要集中在机构设计、动力学建模、控制策略以及应用场景等方面。
其中,机构设计是基础,动力学建模是关键,控制策略是核心,应用场景是目的。
并联机器人的研究热点未来,并联机器人的发展趋势将主要体现在以下几个方面:一是机构设计将更加灵活多样,以满足不同应用场景的需求;二是动力学建模将更加精确,以提高机器人的运动性能和控制精度;三是控制策略将更加智能,以实现更高级别的自动化和智能化;四是应用场景将更加广泛,涉及到工业、医疗、航空航天等领域。
并联机器人的发展趋势并联机器人研究现状分析03轻型并联机器人柔体动力学建模柔体动力学基本理论刚体动力学与柔体动力学的区别刚体动力学主要研究刚体在运动过程中的力学行为,而柔体动力学则研究具有弹性、可变形的物体在力、运动和变形之间的相互关系。
弹性力学基础在柔体动力学中,需要用到弹性力学的相关知识,如应变、应力、弹性模量等概念。
刚柔耦合动力学模型
刚柔耦合动力学模型
刚柔耦合动力学模型是一种模拟柔性物体在刚性结构体上运动和互动的模型。
它是基于多体动力学和弹性理论的复杂模型,通常用于机器人的机械臂、手指、足部等柔性部件的控制和仿真。
在这个模型中,刚性部件和柔性部件之间相互作用,并且对于柔性物体,则采用比较精确地黎曼曲面理论表示。
动力学模型包含了刚性部件的质量、几何结构、摩擦和约束力以及柔性物体的刚度、阻尼和粘滞阻尼。
在这个模型中,刚性结构体可以被表示成结构体中的多个质点,这些点可以通过使用牛顿运动定律和质点系统动力学方程进行运动学和动力学分析。
而柔性物体则可以通过有限元分析进行数值求解和建模,并考虑其非线性本质。
这个模型的分析使得我们可以预测柔性物体在刚性结构体上的运动和应变情况。
刚柔耦合动力学模型的成功建立与应用,为控制机器人手指、足部等柔性部件的制造和控制提供了有效的数学工具。
在现代机器人领域,一些先进的机器学习算法和控制方法已经被成功地应用到刚柔耦合动力学模型中,使得机器人系统的性能和精度得到了大幅提升。
同时,这个模型也为金属材料、塑料材料等柔性材料的应用和制造提供了有力的理论参考。
总之,刚柔耦合动力学模型对于研究和控制复杂机器人和柔性材料产生了重要的价值,为领域的发展奠定了坚实的理论基础。
基于刚柔耦合的自动化动力学仿真分析研究

第6期(总第169期)2011年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672-6413(2011)06-0071-03基于刚柔耦合的自动化动力学仿真分析研究张士存1,付月磊2(1.南车青岛四方机车车辆股份有限公司,山东 青岛 266111;2.安世亚太科技(北京)有限公司,北京 100026)摘要:刚柔耦合是多体系统最常见的力学模型,在其建模分析过程中存在一定的复杂性与重复性。
以三连杆机构为例,通过ANSYS和ADAMS实现刚柔耦合全分析过程,并利用ModelCenter的QuickWrap技术对整个分析过程的功能点进行组件封装,最后通过封装好的组件搭建刚柔耦合分析流程,最终实现自动化的刚柔耦合分析,为进一步的DOE及优化分析奠定了基础。
关键词:刚柔耦合;自动化;动力学;ANSYS;ADAMS中图分类号:TP391.9 文献标识码:A收稿日期:2011-06-28;修回日期:2011-07-08作者简介:张士存(1979-),男,山东济南人,工程师,本科,主要从事仿真集成及高性能计算集群应用工作。
0 引言在机械系统中,柔性体会对整个系统的运动产生重要影响,在进行运动学分析时如果不考虑柔性体的影响将会造成很大的误差,同样整个系统的运动情况也反过来决定了每个构件的受力状况和运动状态,从而决定了构件内部的应力应变分布。
因此采用ANSYS和ADAMS软件的联合仿真应运而生,它不但可以精确地模拟整个系统的运动,而且可以基于运动仿真的结果对运动系统中的柔性体进行应力应变分析[1,2]。
本文基于柔性体仿真的基本数学模型[3,4],以三连杆机构为例,进行刚柔耦合动力学仿真分析全过程研究。
1 刚柔耦合分析本文所要分析的模型为三连杆机构,其中中间的连杆考虑作为柔性体,具体分析模型如图1所示。
1.1 柔性体模态中性文件生成进行刚柔耦合分析的第一步便是创建柔性体的模态中性文件*.mnf文件,模态中性文件是ADAMS软件进行刚柔耦合分析所需要的文件,它包含了柔性体的质量、质心、转动惯量、频率、振型以及对载荷的参与因子等信息,该步骤是在ANSYS中完成的。
基于刚柔耦合与联合仿真的AUV发动机动力学研究
的广义坐标, 且有:
N= [x , y , z , 7 , H, <, qi ] T = [R , 7 , q]
( 2)
x, y , z 为局部坐标系在总体坐标系中的位置;
7 , H, < 为局部坐标系在总体坐标系 中得欧拉角; qi
为模态振型, 且 i = 1 , * , m, m 为模态阶数; R, 7 , q
M&N+ MÛÛN-
1 2
55MNÛN
T
ÛN+
K N+
f
g+Байду номын сангаас
DÛN+
57 5N
T
K=
Q
( 5)
N,ÛN, &N为柔性体的广义坐标及其时间导数; M,
MÛ 为柔性体的质量矩阵及其对时间的导数; f g 为
重力; K为约束方程 7 的拉格朗日乘子; Q 为广义力
# 4#
矩阵.
2 刚柔耦合的联合仿真模型建立
以发动机配气参数、气缸结构参数、航深和航速 等作为外部可调参数. 设置 ADAMS 与 Mat lab 在 同一工 作 空间, 由 ADAMS/ View 调 用 ADAMS/ Cont rol, 确定并定义 ADAMS 模块中样机模型的输 入和输出变量, 即从控制程序返回到 ADAMS 的变 量和从 ADAMS/ Contr ol 输出到控制程序的变量, 从而实现 ADA MS 和控制程序之间的闭环控制. 从 ADAMS 里导出的发动机模型如图 2 所示. 由 Plant Export 自动建立 ADAMS 模块的 Mat lab 初始化文 件、Int eract ive 仿 真 方 式 下 供 View 载 入 文 件 和 Bat ch 仿真方式下供 Solver 载入文件.
直角坐标机器人刚柔耦合动力学仿真分析

Dynamic Simulation Analysis of Rigid-flexible Coupling of Cartesian Robot CHETS Jun, GHEN Wei
(Anhui Micro Bo Changan Electronics Corportion, Lu^an 237010, China) Abstract:The robot is affected by many factors in the process of operation so that the dynamic performance is not sta ble, directly affecting the reliability and safety of the robots. It takes Cartesian robot as the object to study, obtaining the dynamic equation of rigid-flexible coupling based on the theory of multibody system dynamic. The rigid flexible coupling model of robot is established by combining ANSYS and ADAMS software? to carry out the dynamic simulation analysis un der different working speed and load. By analyzing, in the same case of increasing four times>the change of working speeds is more obvious than the change of ending load to the dynamic performance of robot end. Key words:Cartesian robot, multibody system dynamic, rigid-flexible coupling, dynamic simulation
刚柔耦合机械系统动力学仿真
№.3 陕西科技大学学报 J un.2006・74・ J OU RNAL OF SHAANXI UN IV ERSIT Y OF SCIENCE &TECHNOLO GY Vol.243 文章编号:1000-5811(2006)03-0074-04刚柔耦合机械系统动力学仿真刘言松,曹巨江,张元莹(陕西科技大学机电工程学院,陕西咸阳 712081)摘 要:有限元技术和虚拟样机技术相结合,实现了对高速机械系统刚柔耦合的动力学仿真,并以一个算例说明了该方法的可行性。
关键词:有限元技术;虚拟样机技术;刚柔耦合;动力学仿真中图分类号:T H113 文献标识码:A0 前言机械系统的动力学分析与仿真是随着计算机技术的发展而不断成熟的,多体系统动力学是其理论基础。
多体系统是指由多个物体通过运动副连接的复杂机械系统,多体系统动力学的根本目的是用计算机技术进行复杂机械系统的动力学分析与仿真。
多体系统可分为多刚体系统和多柔体系统,前者是指对于低速运动的系统中的物体,由于其弹性变形不影响其大范围的运动特性,因此均被假定为刚体,后者是指在大型、轻质、高速的工况下,组成系统的物体的弹性变形直接影响了系统的运动特性,因而将所有或部分物体假定为柔性体。
本文将研究如何利用有限元技术和虚拟样机技术实现刚柔耦合的机械系统的动力学仿真。
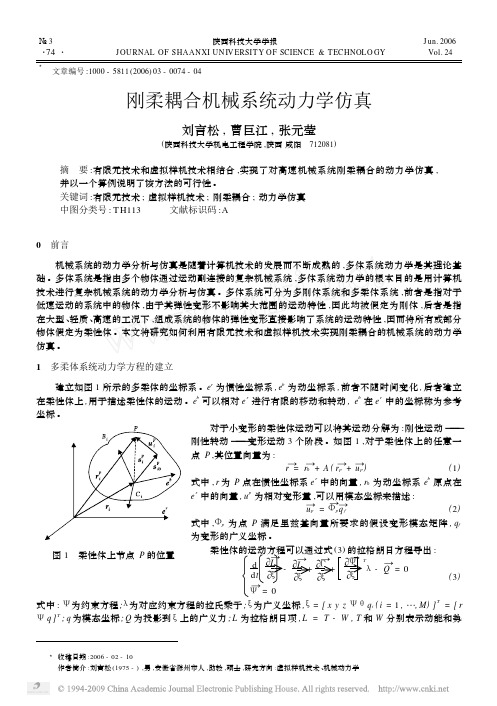
1 多柔体系统动力学方程的建立建立如图1所示的多柔体的坐标系。
e r 为惯性坐标系,e b 为动坐标系,前者不随时间变化,后者建立在柔性体上,用于描述柔性体的运动。
e b 可以相对e r 进行有限的移动和转动,e b 在e r 中的坐标称为参考坐标。
图1 柔性体上节点P 的位置对于小变形的柔性体运动可以将其运动分解为:刚性运动———刚性转动———变形运动3个阶段。
如图1,对于柔性体上的任意一点P ,其位置向量为:r = r 0+A ( r p + up )(1)式中,r 为P 点在惯性坐标系e r 中的向量,r 0为动坐标系e b 原点在e r 中的向量,u p 为相对变形量,可以用模态坐标来描述:u p = Φp q f(2)式中,Φp 为点P 满足里兹基向量所要求的假设变形模态矩阵,q f为变形的广义坐标。
刚—柔耦合系统动力学建模理论与仿真技术研究
刚—柔耦合系统动力学建模理论与仿真技术研究一、概述随着现代科学技术的发展,刚—柔耦合系统在航空、航天、机械工程等多个领域发挥着越来越重要的作用。
这类系统通常由刚体部分和柔性体部分组成,其动力学行为既包含刚体的运动特性,也包含柔性体的变形特性。
如何准确、高效地对刚—柔耦合系统进行动力学建模和仿真,对于理解和预测系统在实际工作条件下的行为,以及优化系统设计具有重要意义。
本文旨在对刚—柔耦合系统的动力学建模理论与仿真技术进行深入研究。
将对刚—柔耦合系统的基本概念、特点和分类进行介绍,明确研究背景和意义。
随后,将综述当前在刚—柔耦合系统动力学建模领域的主要方法和进展,包括基于多体系统动力学理论的建模方法、有限元方法、以及近年来兴起的刚—柔耦合建模方法。
在此基础上,本文将重点探讨刚—柔耦合系统动力学建模的关键技术,如刚柔耦合界面的建模、参数识别、以及模型验证等。
本文还将探讨刚—柔耦合系统动力学仿真的相关技术。
仿真技术的选择和实现对于准确预测系统动态行为至关重要。
本文将分析不同的仿真策略,如多体系统动力学仿真、有限元仿真以及多尺度仿真,并探讨这些策略在刚—柔耦合系统中的应用。
同时,将讨论仿真过程中可能遇到的问题和挑战,如计算效率、精度控制和结果分析等。
本文将通过具体的案例研究,展示所提出的动力学建模与仿真技术在刚—柔耦合系统中的应用效果,验证所提方法的有效性和实用性。
通过本文的研究,期望能为刚—柔耦合系统动力学建模与仿真技术的发展提供新的理论依据和技术支持。
1. 刚—柔耦合系统的定义与特性刚—柔耦合系统是指在工程实际中广泛存在的一类复杂系统,其核心特点在于系统内同时包含了刚性部件和柔性部件。
这种系统的动力学行为不仅受到刚性部件的直接影响,还受到柔性部件的显著作用。
刚—柔耦合系统的动力学建模与仿真技术研究,对于理解和预测这类系统的动态行为具有重要的理论和实际意义。
刚—柔耦合系统可以被定义为一个由至少一个刚性部件和一个柔性部件组成的动力学系统。
并联机器人系统中的动力学建模与控制策略研究

并联机器人系统中的动力学建模与控制策略研究1. 引言随着科技的不断发展,机器人技术已经成为现代工业和服务领域中不可或缺的一部分。
并联机器人系统作为一种重要的机器人结构,由于其高刚度、高运动精度和较大的负载能力,在工业生产中得到了广泛应用。
本文将对并联机器人系统中的动力学建模与控制策略进行研究。
2. 并联机器人系统的动力学建模动力学建模是指通过对系统进行物理模型的建立,揭示系统各个部分之间的相互作用规律。
并联机器人系统的动力学建模是研究其受力、位移和速度之间的关系,为后续的控制策略设计提供基础。
通常,可以基于拉格朗日动力学原理对并联机器人系统进行建模。
通过将机器人的动力学方程转换为广义坐标形式,可以得到系统的动力学方程。
3. 并联机器人系统的动力学控制策略并联机器人系统的动力学控制策略是通过对系统的动力学特性进行分析和优化,实现对机器人系统的精确控制。
常见的控制策略包括:位置控制、力控制和轨迹控制。
位置控制是指控制机器人终端执行器的位置达到预定的目标位置,常用的方法包括PID控制和模糊控制。
力控制是指对机器人系统施加力或力矩,以实现对外界力的检测和反馈控制;轨迹控制是指控制机器人终端执行器的运动轨迹,使其按照预定的轨迹进行运动。
4. 并联机器人系统的动力学建模与控制策略实验研究为验证动力学建模与控制策略的有效性,需要进行实验研究。
通过采集并联机器人系统的动力学参数,设计合理的实验方案,可以对系统的动力学建模和控制策略进行验证。
实验结果表明,基于动力学建模和控制策略设计的并联机器人系统具有较高的精度和可靠性,可以在实际工作环境中得到有效应用。
5. 并联机器人系统的动力学建模与控制策略的研究进展和展望当前,随着人工智能、机器学习和深度学习等技术的快速发展,对并联机器人系统动力学建模与控制策略的研究也呈现出新的趋势。
将人工智能技术与动力学建模和控制策略相结合,可以进一步提高并联机器人系统的自主学习和自适应能力。
柔性多体动力学模型建立与仿真分析
柔性多体动力学模型建立与仿真分析一、引言柔性多体动力学模型是描述机器人、航天器、汽车等复杂系统运动和变形的重要工具,它能够准确地模拟系统的非线性动力学行为。
在科学、工程和军事等领域,准确理解和预测系统的运动行为对于设计和优化系统至关重要。
本文将探讨柔性多体动力学模型的建立与仿真分析。
二、柔性多体动力学模型的基本原理柔性多体动力学模型是由刚体和柔性体组成的,刚体用于描述系统的几何形状和质量分布,而柔性体则用于描述系统的弹性变形。
在建立柔性多体动力学模型时,需要考虑以下几个方面。
1. 刚体动力学模型刚体动力学模型主要由刚体质量、质心位置、惯性矩阵和外力矩阵等参数组成。
通过牛顿-欧拉方程,可以求解刚体的运动学和动力学参数。
2. 柔性体动力学模型柔性体动力学模型主要由弹性变形方程、弹性势能和形变能等参数组成。
通过拉格朗日方程,可以求解柔性体的运动学和动力学方程。
3. 位形坐标描述在建立柔性多体动力学模型时,需要选择合适的位形坐标描述模式。
常用的位形坐标描述模式有欧拉角、四元数和拉格朗日点坐标等。
三、柔性多体动力学模型的建立1. 刚体建模在刚体建模中,需要确定刚体的质心位置、惯性矩阵和外力矩阵等参数。
通过对刚体进行转动惯量测量、质心定位和精确测力等实验,可以得到准确的参数值。
2. 柔性体建模柔性体建模是建立柔性多体动力学模型的关键步骤之一,通过选择合适的柔性体模型和参数,可以准确地描述系统的弹性变形。
常用的柔性体模型包括弯曲梁模型、剪切梁模型和薄板模型等。
通过有限元分析和实验测试,可以获取柔性体的弹性参数和模态特性。
3. 使用有限元方法建立模型有限元方法是建立柔性多体动力学模型的常用方法,它通过将柔性体划分为有限个单元,利用单元间的相对位移和应变关系,求解节点的位移和形变。
通过有限元方法建立的模型,能够在较高的精度下反应系统的运动和变形情况。
四、柔性多体动力学模型的仿真分析1. 动力学仿真通过动力学仿真,可以模拟柔性多体系统受到外力作用下的运动行为。
大范围运动刚柔耦合系统动力学建模与仿真

大范围运动刚柔耦合系统动力学建模与仿真
1. 引言
大范围运动刚柔耦合系统是指由刚体和柔性体组成的一个多自由
度系统,其动力学行为受到刚体运动与柔性体变形相互影响。
对该系
统进行动力学建模并进行仿真,是解决运动过程中刚性物体与柔性物
体间耦合问题的重要手段之一。
2. 刚柔耦合系统的建模
在建模过程中,需要对刚体、柔性体分别进行建模,并将两者进
行耦合。
刚体可以采用牛顿-欧拉法进行建模,柔性体建模可以采用有
限元方法。
在耦合过程中,需要对两种物体之间的作用力进行建模,
这需要考虑到弹性力、刚性力和摩擦力等。
3. 系统动力学分析
根据刚柔耦合系统的动力学模型,可以得到该系统的运动方程式,进一步进行动态响应分析。
在该分析中,主要考虑系统在外界激励下
的运动响应,包括物体的运动及变形等多个参数。
4. 仿真模拟
为了验证理论模型的准确性和动力学模型的有效性,需要采用计
算机仿真技术进行系统模拟。
在仿真模拟中,通过对系统模型的初始
条件和外部激励进行设定,可以得到运动过程中各参数值的变化情况。
5. 结论
大范围运动刚柔耦合系统动力学建模与仿真是目前解决复杂多自由度系统运动问题的重要手段之一。
该方法可以为系统设计和优化提供依据,是工程实践中不可或缺的手段。
机器人的动力学建模与仿真

机器人的动力学建模与仿真机器人的动力学建模与仿真是机器人研究领域中的重要内容。
通过建模和仿真,可以模拟机器人在不同环境下的运动和行为,从而为机器人的设计、控制和优化提供理论支持和实验验证。
本文将介绍机器人动力学建模与仿真的基本概念、方法和应用。
一、机器人动力学建模的基本概念机器人动力学建模是指将机器人的运动和行为抽象成数学模型的过程。
通过建立动力学模型,可以描述机器人在受力作用下的运动状态和力学特性。
机器人的动力学建模通常包括两个方面:刚体动力学和关节动力学。
1. 刚体动力学刚体动力学是指对机器人整体进行物体运动学和物体动力学的描述。
其中,物体的运动学描述了物体的位置、速度和加速度等基本运动信息,物体的动力学描述了物体受力和力矩作用下的运动规律。
常用的刚体动力学建模方法有牛顿-欧拉方法、拉格朗日方法和Hamilton方法等。
2. 关节动力学关节动力学是指对机器人关节的运动学和动力学进行建模。
机器人的关节通常由电机和传动装置组成,通过控制电机的转速和位置,可以实现机器人的关节运动。
关节动力学建模的主要目标是描述机器人的关节轨迹、速度和加速度等关键特性。
关节动力学的建模方法主要有拉格朗日方法和牛顿-欧拉方法等。
二、机器人动力学仿真的基本方法机器人动力学仿真是指使用计算机软件对机器人的动力学模型进行数值模拟和分析的过程。
通过仿真,可以预测机器人在特定条件下的运动行为,并评估设计和控制方案的有效性。
下面介绍几种常用的机器人动力学仿真方法。
1. 正向动力学仿真正向动力学仿真是通过给定机器人的输入力和初始状态,计算机模拟机器人在一定时间内的运动轨迹和动态响应。
这种仿真方法可以用于评估机器人在不同工作条件下的运动性能和稳定性,为机器人的设计和控制提供参考。
2. 反向动力学仿真反向动力学仿真是指根据机器人期望的轨迹和运动行为,逆向计算出机器人关节所需要的输入力或驱动方式。
这种仿真方法常用于机器人的运动规划和控制,可以帮助优化机器人的运动性能和能耗。
Delta并联机器人刚柔耦合仿真分析
Delta并联机器人刚柔耦合仿真分析QIN Bodong;ZHANG Lin;ZHANG Yue;SHANG Deyong【摘要】为了提高Delta并联机器人在负载较大且高速拾取目标样本时的运动精度,对机器人进行刚柔耦合分析,以求减少运动误差.通过Solidworks对Delta并联机器人三维建模并简化,Matlab对并联机器人末端轨迹进行规划,反解得到机器人运动过程中主动杆的角位移变化,ANSYS对从动杆柔性化导入ADAMS中进行联合仿真,在不同负载条件下观察分析机器人末端误差和运动过程中柔性杆的变形,可以得出随着负载的增加机器人末端误差加大,并且运动过程中杆件误差随时间叠加,这为寻找解决定位误差的方法提供了参考.【期刊名称】《现代机械》【年(卷),期】2019(000)003【总页数】4页(P1-4)【关键词】Delta并联机器人;刚柔耦合;动力学;仿真【作者】QIN Bodong;ZHANG Lin;ZHANG Yue;SHANG Deyong【作者单位】;;;【正文语种】中文【中图分类】TP240 引言Delta并联机器人由静平台、动平台、主动杆和从动杆组成,通常具有3~4个自由度,可以实现工作空间的XYZ方向的平移以及绕Z轴的旋转运动[1]。
由R.Clave博士发明的3自由度空间平移Delta并联机器人是经典的并联机器人,近几年国外研究机构如法国的LIRMM-CNRS实验室、瑞士的EPFL大学、以及ABB、Fanuc等对于并联机构的结构优化问题展开了广泛研究。
其驱动电动机固定安装,大大减少了机器人运动过程中的惯量,实现了快速运动,配置视觉系统后能够智能识别、检测物体,主要应用于食品、药品和电子产品等快速分拣、抓取、装配。
目前市场上的Delta机器人从动杆采用质量轻的碳纤维细长杆件制作,在进行轨迹规划过程中尤其是在高速、载荷较大的场合,如当作刚体分析将会产生一定精度误差。
本文通过ANSYS和ADAMS软件进行联合仿真对Delta并联机器人进行刚柔耦合分析,利用ANSYS软件对目标连杆进行柔性化、划分网格并生成MNF模态中性文件,导入ADAMS中替换原来的刚性从动杆。
四自由度刚柔耦合串并联康复机械臂建模及特性分析
四自由度刚柔耦合串并联康复机械臂建模及特性分析四自由度刚柔耦合串并联康复机械臂建模及特性分析摘要:本文针对康复机械臂在实际应用中存在的柔性和耦合问题,对四自由度刚柔耦合串并联康复机械臂进行了建模和特性分析。
首先,通过对机械臂运动学进行建模,得到机械臂的位置和姿态。
然后,基于刚体动力学和灵活体动力学原理,对机械臂的动力学进行了建模。
接着,通过参数辨识技术,对机械臂的实际参数进行了估计。
最后,通过仿真实验证实了所提出的方法的有效性,并对机械臂的特性进行了分析。
关键词:康复机械臂;刚柔耦合;串并联;建模;特性分析一、引言随着老龄化社会的到来,康复机械臂作为辅助康复的重要手段,在康复领域得到了广泛的应用。
然而,由于人体运动的连续、柔性和高度耦合特性,传统的刚性机械臂难以满足康复训练的需求。
因此,研究刚柔耦合康复机械臂具有重要的理论和实际意义。
二、机械臂建模1. 机械臂运动学建模鉴于机械臂的结构和运动特点,采用代数方法建立机械臂的正逆运动学模型,得到机械臂的位置和姿态。
通过正运动学模型,可以计算末端执行器的位置和姿态,而通过逆运动学模型,可以实现对机械臂的位置和姿态的精确控制。
2. 机械臂动力学建模在机械臂动力学建模中,首先将机械臂划分为刚体链、柔性链和末端执行器。
然后,基于刚体动力学和灵活体动力学原理,建立刚体链的动力学方程和柔性链的干摩擦模型。
在此基础上,考虑由刚性和柔性链耦合引起的相互作用力和扭曲效应,并将其纳入动力学模型中。
三、参数辨识由于实际机械臂的参数往往难以准确测量,因此需要进行参数辨识,以获得模型的实际参数。
在参数辨识中,通过对机械臂的运动和受力进行实验测量,并结合最小二乘法等统计方法,对机械臂的参数进行估计。
通过参数辨识,可以获得精确的机械臂模型,为后续的分析和控制提供准确的基础。
四、仿真实验与特性分析为了验证所提出的建模方法的有效性,对所建立的机械臂模型进行了仿真实验。
通过设计不同的控制策略和外部扰动条件,对机械臂的运动学和动力学进行了分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
刚柔耦合并联机器人动力学建模及仿真研究
1.前言
刚柔耦合并联机器人是一种新型的机器人技术,其特点是结合了刚体机器人和柔性机器人的优点,在运动控制、机械刚度、操作灵活性等方面具有很大的优势。
本文旨在通过对刚柔耦合并联机器人的动力学建模及仿真进行研究,探索其在机器人领域的应用前景。
2.刚柔耦合并联机器人的概念和特点
刚柔耦合并联机器人是指将刚体机器人和柔性机器人结合起来,构成一种新型的机器人系统。
其特点在于,将多个刚体部分通过柔性连接构成一个整体,在此基础上再进行机械臂设计及运动控制,使得机器人系统在运动中能够具备较高的柔性和韧性,同时兼备高刚度和高精度的优点。
与传统的刚体机器人相比,刚柔耦合机器人具有以下几个方面的特点:
(1)柔性连接:用柔性连接将多个刚体部分构成一个连续的机械臂结构,使得机械臂在操作时能够兼顾柔性和刚度。
(2)高韧性:由于采用了柔性部件,机械臂的韧性得到了提高,在进行协作任务时具有较好的适应能力。
(3)高效率:柔性部件的加入使得机械臂的运动更加平稳,能够在较高的速度下进行操作,提高了工作效率。
3.刚柔耦合并联机器人的动力学模型
为了更好地掌握刚柔耦合并联机器人的运动特性,需要对其进行
动力学建模。
在机器人运动学模型中,关节角度、连杆长度以及机器
人末端的空间位置是非常重要的参数。
在刚柔耦合机器人中,由于连
接部件的柔性,连接部件的长度随时间和机器人的运动而变化。
因此,建立刚柔耦合并联机器人的动力学模型需要考虑柔性连接部件的材料
特性和节点运动方程。
在建立动力学模型时,可以采用Lagrange动力学方法。
其中,Lagrange的动力学方程可以表示为:
Lagrange(T)- Lagrange(U)=d/dt(dL/d/dt(T))
其中T表示机械臂的运动状态参数,U表示势能,L表示机械臂的
动能。
利用该方程可以求解机械臂在运动过程中所受到的各种力。
4.刚柔耦合并联机器人的运动控制
刚柔耦合并联机器人的运动控制是实现机器人高精度和高柔性的
重要措施。
在机器人运动控制方面,需要针对不同的任务获得相应的
运动规划。
根据机器人运动学和动力学模型,可以采用控制理论和算法,如PID控制、模糊控制以及神经网络控制等方法,实现机械臂的
运动控制。
在刚柔耦合并联机器人的运动控制中,需要考虑柔性连接部件的
时间变化特性,使得机械臂在运动过程中能够兼具高刚度和高柔性。
在实际应用中,可以利用机器人的运动学模型,结合机器人稳定控制
理论,对机械臂的运动轨迹进行优化,实现机械臂的高精度控制。
5.仿真模拟与实验验证
在进行机器人设计及控制方案制定时,需要根据不同的任务要求
对刚柔耦合并联机器人进行系统仿真。
在仿真模拟中,可以采用SolidWorks、ADAMS等相关软件建立机器人的三维模型,并进行运动学和动力学仿真分析。
最终,根据仿真结果进行机器人控制方案的修改
和优化。
同时,在仿真模拟完成后,还需要进行实验验证,以验证机器人
的实际性能。
根据机器人的特点及任务要求,可以进行相关实验,如
负载试验、运动跟踪试验、重复精度试验等,对机械臂的机械刚度、
精度和柔性进行测试和评估,最终确定机器人的实际性能。
6.结论
刚柔耦合并联机器人在机器人领域的应用前景十分广阔。
通过对
其动力学建模及仿真研究,可以更好地了解其在运动控制、机械刚度、操作灵活性等方面的具体特点。
面对实际应用,需要根据不同的任务
需求,采用相关算法和控制方案,制定最佳的运动规划和控制方案,
最终实现刚柔耦合机器人的精准控制和优化应用。