可靠性原理_孙有朝_第二章不可修复系统的可靠性
系统可靠性
( ) 2-6
) 可知, 2 - 6 ∰ 越大,∹ 由式 ( s 越大 。 实际上大多数情况 ∰= ,此时 2
2 2 ∹ 1-∹) ∹ -∹ =2 s = 1- (
( ) 2-7
第2章 系统可靠性、可用性模型
·2 5·
若各单元寿命为指数分布时,设各单元失效率相同均为λ, 则系 统可靠性、系统失效率、系统平均寿命分别为
图2 - 2 串联系统可靠性框图
若每个单元可靠性分别为 ∹ ∹ 1,…, ∰, 且诸单元互相独立 , 则 系统可靠性为
∰
∹ ∹ s= ∏ ∳
1 ∳ =
( ) 2-1
) ,…, ) , 则系统可靠 ˇ ˇ 若已知各单元失效率分别为λ λ 1 ( ∰ ( 性、系统失效率、系统平均寿命分别为 ) ∹ ˇ x =e p- s( ] ˋ) ˋ) d ˋ} 烌 +…+ λ( λ( {∫[ x d ˋ} =e - λ( p{ ∫ ˋ)
第2章 系统可靠性、可用性模型
·2 3·
2 1 2 典型系统可靠性模型 2 . 1 . 2 . 1 串联系统 由若干单元组成的系统, 只要有一个单元发生故障, 该系统就 发生故障,这样的系统就是可靠性串联系统。 显然,系统可靠性小于至多等于各单元可靠性最小值,即 { ∹ i n ∹ s≤m ∳} 式中 ∹ — —第∳个单元可靠性。 ∳— 串联系统可靠性框图如图2 - 2所示。
1 ) ˇ d ˇ= ∑ = ∹ θ s( s 0 λ ∳ ∬∳ = 表决系统有以下特殊情形:
∰
烍 烎
( ) 2-1 0
∫
) / 。 / 1 0 ∰ ( )系统,∹ 1 0 ∰= ) / / 2 ∰ ∰ ( )系 统 或 1 ∰ ( )系 统 等 价 于 ∰ 个 单 元 串 联 系 统,即
可靠性2(1)
可靠性理论第二讲不可修基本系统所谓典型不可修系统是指组成系统的部件失效后并不对其进行维修(更换)的系统。
本讲介绍串联、并联、表决、混联等基本系统的可靠性模型。
描述不可修系统可靠性的主要数值指标是系统可靠度R(t)和系统平均寿命MTTF。
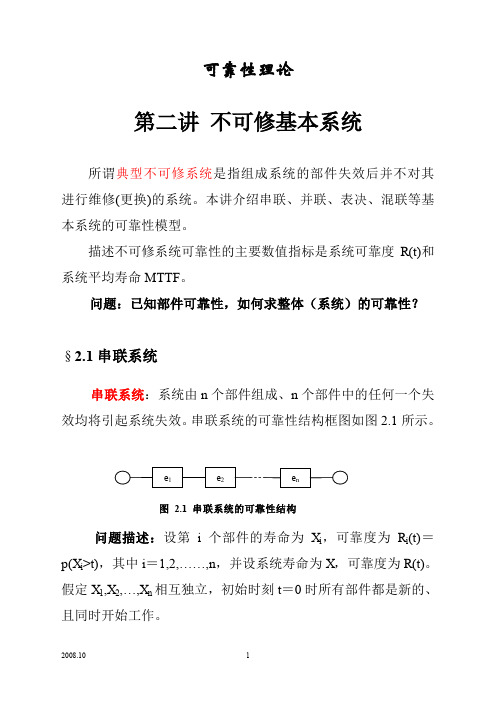
问题:已知部件可靠性,如何求整体(系统)的可靠性?§2.1串联系统串联系统:系统由n个部件组成、n个部件中的任何一个失效均将引起系统失效。
串联系统的可靠性结构框图如图2.1所示。
问题描述:设第i个部件的寿命为X i,可靠度为R i(t)=p(X i>t),其中i=1,2,……,n,并设系统寿命为X,可靠度为R(t)。
假定X1,X2,…,X n相互独立,初始时刻t=0时所有部件都是新的、且同时开始工作。
由串联系统定义可知,系统寿命X 应等于各部件寿命X i 的最小者,即X =M in {X 1,X 2,……,X n }。
于是,系统的可靠度为:12()()(M {X ,X ,,X })n R t p X t p in t =>=⋅⋅⋅>12(X X X )n p t t t =>>⋅⋅⋅>,,,∏∏===>=ni i n i i t R t X p 11)()( 当第i 个部件的失效率为λi (t )时,系统可靠度为})(ex p{})(ex p{)(0110⎰∑∏⎰==-=-=t n i in i t i du u du u t R λλ ∴系统的失效率为∑=='-=n i i t t R t R t 1)()()()(λλ 因此,一个由独立部件组成的串联系统的失效率是所有部件失效率之和。
系统的平均寿命为:⎰⎰⎰∞∞-==000})(ex p{)(dt du u dt t R MTTF tλ讨论:1)如果t i i e t R λ-=)(,其中i =1,2,……,n ,即所有部件寿命X i 服从参数为λi 的负指数分布,那么有:}ex p{)(1∑=-=t i i t t R λ,11][-=∑=ni i MTTF λ 因此,系统的寿命分布也服从负指数分布。
第2章 系统安全的可靠性 《电子商务安全》PPT课件

各冗余软件的最终规范及最终设计、最终编程由不 同的审核人员对照软件需求、软件规范、软件设计
容错软件设计的基本技术 系统级容错
进行审核。 如果开发采用了CAD工具,则各冗余软件应采用不 同的CAD工具
常见的双机容错模式 计算机集群系统
各冗余软件分析测试程序的规范、测试方式、测试 程序,尽可能由不同的互相独立的课题组人员开发。 各冗余软件应在算法上相异。
电子商务安全
::CONTENTS::
第2章 系统安全的可靠
性 计算机系统的可靠性与容错性
容错软件设计的基本技术
计算机系统可靠性
完美性与避错技术 容错技术
容错软件的相异性设计准则 各冗余软件由相互独立的不同人员进行开发。 各冗余软件以不同的形式说明。
系统冗余
各冗余软件的设计评审的参与人员不重复。
冗余容错技术
第2章 系统安全的可靠
性 计算机系统的可靠性与容错性
2.3 系统级容错
计算机系统可靠性 完美性与避错技术
2.3.1 常见的双机容错模式
容错技术
系统冗余
冗余容错技术
容错软件设计的基本技术
系统级容错
常见的双机容错模式 计算机集群系统
软件容错方法
容错技术的应用 RAID磁盘阵列特征 RAID磁盘阵列类型
本章小结
统还可自动对主机发送过来的读/写指令进行优化 处理,以智能化方式将可能被读取的数据预先读 入快速缓存中,从而大大减少了磁头的转动次数,
软件容错方法 容错技术的应用
提高了I/O速度。RAID7可帮助用户有效地管理日 益庞大的数据存储系统,并使系统的运行效率提 高至少一倍以上,满足了各类用户的不同需求。
RAID磁盘阵列特征 RAID磁盘阵列类型
冷储备-不可修复系统可靠性(陆中)

则
A = A1 Α 2 Α n = Α i
i =1
n
3 串联系统
系统可靠性一般表达式
n
n n P(A) = Ρ Αi = ∏ Ρ(Αi ) i =1 i =1
i =1
Rs (t ) = ∏ Ri(t)
在串联系统中,系统的可靠度是元件(单元)可靠度 的乘积; 串联子系统的可靠度比任一单元要小 R s (t ) < R i (t ) ; 提高最低可靠度单元(薄弱环节)的可靠度效果会更 好。
n 1 = ⋅ 1 − e −λ ⋅t λ n
(
=
λ
令i=k (1≤k<n)时等式成立
+∞ 0 0
令y = 1 − e
1
− λ ⋅t
⇒ dy = λe
− λ ⋅t
1 dt = λ (1 − y )dt ⇒ dt = dy λ 1− y
1
1 1 n −1 1− yn 1 n −1 1 i dy = ∫ (∑ y )dy = ∑ θs = ∫ 0 λ (1 − y ) 0 λ λ i =0 i i =0
A
C B D
6 k/n表决系统
特征:n个单元中只要有k个单元正常工作系统就 能正常工作
k=n时,为串联系统 k=1时,为并联系统
6 k/n表决系统
以2/3系统为例
设:Ai-单元i处于正常工作状态(i=1,2,3) A-系统处于正常工作状态
A = (A 1 A 2 ) (A 1 A 3 ) (A 2 A 3 )
Rs (t ) = R1 (t ) R2 (t ) + R1 (t ) R3 (t ) + R2 (t ) R3 (t ) − 2 R1 (t ) R2 (t ) R3 (t )
可靠性理论- 系统可靠性预测
s 1 2 n
可靠度预测-数学模型法-旁联系统
系统可靠度:
Rs(t) = P(Ts>t)= P(T1+T2+…+Tn>t)
当n个元件均服从 R et时,有
Rs
et
1
t
(t)2
2!
(t)3
3!
((nt)n1)1!
e t 1
)
2.2.2、布尔真值法(穷举法)
网络系统
x1
x3
x2
x5 x4
共有25=32微观状态
x1 x2 x3 x4 10000 20000 70011 80011 32 1 1 1 1
可靠度预测-布尔真值法
x5 系统状态 Rsi
0
F
1
F
0
S 0.00336
1
S 0.03024
1
S 0.28224
2.3.2、转移概率
设{x(t),t≥0}是取值在E={0,1,2,…,N}上的一个随机过程。 如果对任意t,u≥0,若u时刻的状态为x(u)=i,u+t时刻的状态为j, 则从状态i转移到状态j的概率为:
P{x(t+u)=j |x(u)=i}=pij(t) i,j∈E=(0、1、2、3………)
与(起始点)u 时刻以前的状态无关。称pij(t)为从状态i到状态j 的转移概率。
2.2.4、全概率分解法
可靠度预测-全概分解法
x1
x4
x3
x2
x5
x1
A
x4
BA
x2
x5
(a)
x3正常时(短路)
RS p(s / x3 ) p(x3 ) p(s / x3) p(x3)
02第二章:不可修复系统可靠性(陆中)

并联模型故障率曲线
4 并联系统
各单元失效时间服从指数分布且失效率相等
R s (t ) = 1 − 1 − e
λs (t ) =
(
−λ ⋅t n
)
nλe −λ⋅t 1 − e −λ⋅t 1− 1− e
(
(
则
A = A1 Α 2 Α n = Αi
i =1
n
4 并联系统
系统可靠性一般表达式
n n P(A ) = Ρ Αi = ∏ Ρ(Ai ) i =1 i =1
Fs (t ) = ∏ Fi(t)
i =1
n
R s (t ) = 1 − ∏ [1 - R i (t)]
2 可靠性框图
又称可靠性功能逻辑框图
系统与单元功能间的逻辑关系图,建立可靠性功能逻 辑框图,不能从结构上而应从功能上研究系统类型。
从功能研究系统可靠性
2 可靠性框图
C1 B
例:
A
C2
C1
C2 B
如果分析的是系统短路失效,只要一个短路, A 系统即短路。其系统可靠性功能逻辑框图为:
C1
3 串联系统
串联系统可靠性—用随机向量函数分布描述
第i个单元的寿命为Ti ,系统寿命为T, 则
T = min{T1 , T2 , Tn }
Rs (t ) = P(Ts > t ) = P(min{T1 , T2 , Tn } > t ) = P(T1 > t , T2 > t , Tn > t ) = P{T1 > t ) × P(T2 > t ) P(Tn > t ) = R1 (t ) × R2 (t ) Rn (t )
系统的可靠性

2
n
Se Sw
待机单元
工作单元
检测装置
装换装置
第三讲 系统的可靠性
第三讲 系统的可靠性
如系统中失效检测和装换装置可靠度为1,各单元元件在储存期内不影响其寿命,当各单元失效率相同时,系统的可靠度为: (3-17) 如果旁联系统分别由1和2两个单元组成,其失效检测和转换装置的可靠性为Rsw,则该旁联系统的可靠度为: (3-18) 并联系统和表决系统都是工作冗余,也叫热储备,而旁联系统为非工作冗余,也叫冷储备。
第三讲 系统的可靠性
第三讲 系统的可靠性
第三讲 系统的可靠性
若各单元的寿命均服从指数分布,即Ri(t)=e-it,式中i为第i个单元的失效率,则: (3-2) 式中s为串联系统的失效率: (3-3) 串联系统的平均寿命定义为: (3-4)
如各单元的失效率均相等,则有: s=n (3-5) MTTFs=1/n (3-6) 串联系统的可靠度好象链条的可靠度,只要链条中任一链环断裂,链条就坏,所以,链条的寿命是由强度最差,寿命做短的链环来决定,所以,串联系统又叫链条模型。 [例题] 如果一个串联系统由10个失效率 均等于10-5/h的单元组成,且已知各单元的寿命均服从指数分布,试求该系统的失效率,平均寿命MTTFs及工作到104h时的可靠度Rs(104h). 解:将n=10, =10-5/h代入式(3-5)可得: =1010-5/h=10-4/h MTTFs=1/ s=1/(10-4/h)=104h 将 s,t=104h代入式(3-2)可得 Rs(104h)=e-10-4 104=e-1=0.368
第三讲 系统的可靠性
第三讲 系统的可靠性
若各单元的寿命均服从指数分布,即R(t)=e- t, 为各单元的失效率,则系统可靠度Rs(t)为: (3-14) 所以: (3-15) 用归纳法可证明:
系统可靠性原理(全部)
第2章 元件可靠性分析
1 元件的基本概念
元件 在可靠性统计、检验和分析中不需要再细分 的部件或部件组合。元件应有独立的功能 元件分为有效和失效两状态(可能有多个状态) 可修复元件 如果元件使用一段时间后发生故障, 经过修理能够恢复到原来的工作状态 不可修复元件 如果元件使用一段时间后发生故障, 不能修复或虽能修复,但很不经济 元件的可靠性指标包括:故障分布函数、故障密 度函数、可靠度函数、平均无故障工作时间、故 障率函数
委内瑞拉大停电 2008年4月29日16时15分发生大规模停电, 包括首都加拉加斯在内的全国一半地区受到停 电影响。加拉加斯以及委内瑞拉中部、西部13 个州的全部或部分地区受到影响。停电后,加拉 加斯地铁全线瘫痪,缺少了红绿灯的地面交通变 得混乱不堪。
3 电力系统可靠性
• 电力系统可靠性是可靠性理论在电力系统中的 应用 • 电力系统可靠性是指电力系统按可接受的质量 标准和所需数量不间断地向电力用户供应电力 和电能量的能力 • 电力系统可靠性包括充裕度和安全性两个方面 • 充裕度是在静态条件下电力系统满足用户电力 和电能量的能力 • 安全性是在动态条件下电力系统经受住突然扰 动并不间断地向用户提供电力和电能量的能力
3电力系统可靠性?电力系统可靠性是可靠性理论在电力系统中的应用可靠性理论在电力系统中的应用?电力系统可靠性是指电力系统按可接受的质量标准和所需数量不间断地向电力用户供应电力和电能量的能力向电力用户供应电力和电能量的能力充和安两?电力系统可靠性包括充裕度和安全性两个方面?充裕度是在静态条件下电力系统满足用户电力和电能量的能力条件下电力系统满足用户电力和电能量的能力?安全性是在动态条件下电力系统经受住突然扰动并不间断地向用户提供电力和电能量的能力条件下电力系统经受住突然扰动并不间断地向用户提供电力和电能量的能力31研究内容第一层发电系统可靠性评估第二层层发输电系统可靠性评估输电系统可靠性评估层第层发输电系统可靠性评估第三层电力系统可靠性配电系统可靠性评估发电厂变电所电气主接线可靠性评估发电厂变电所电气主接线可靠性评估?研究如何用统计的方法获得元件的可靠性指标研究如何用统计的方法获得元件的可靠性指标?研究如何构成各个环节的可靠性数学模型?寻找提高电力系统可靠性的途径和方法32电力系统可靠性的任务?研究可靠性和经济性的最佳搭配课程内容?系统可靠性基本概念?不可修复系统可靠性分析方法?可修复系统可靠性评估方法?状态空间分析法?共模故障的分析?频率与持续时间法?考虑两态天气情况下的马尔可夫过程参考书目?李群湛
不可修复系统的可靠性

3.4 单部件可修系统
上图的转移概率矩阵为:
0 1 λt (= P(t )) P = 0 1 λt t 1 t 1
3.4 单部件可修系统
令
P0 (t ) = P{x(t ) = 0}、P1 (t ) = P{x(t ) = 1}
3.4 单部件可修系统
3.1 马尔可夫过程
马尔可夫ห้องสมุดไป่ตู้程定义
马尔可夫过程是一类“后效性”的随机过程。 简单地说,在这种过程中系统将来的状态只与现 在的状态有关,而与过去的状态无关。或者说, 若已知系统在t0时刻所处的状态,那么t> t0时的状 态仅与时刻t0的状态有关。
3.1 马尔可夫过程
马尔可夫过程的数学描述
设{x(t),t≥0}是取值在E={0,1,2,…}或E={0,1,2,…,N}上的一 个随机过程。若对任意n个时刻点0≤t1<t2<…<tn 均有: P{x(tn)=in|x(t1)=i1,x(t2)=i2,…,x(tn-1)=in-1} =P{x(tn)=in|x(tn-1)=in-1} i1,i2,…,in∈E
P 0 λ + P1 = 0 P 0 λ P1 = 0
P0 =
λ+
P1 =
λ λ+
3.4 单部件可修系统
单部件系统是指一个单元组成的系统(或把整个系 统当作一个单元来研究),部件故障系统故障,部 件正常系统正常。
0 x(t ) = ( 系统状态 ) 1
时间到t系统正常 时间到t系统故障
第三章
可修复系统的可靠性
第三章 可修复系统的可靠性
4 指数分布和不可修复系统的可靠性--40

统就能正常运行,即必须两个元件都故障系统才失
效。因此可计算系统的失效概率为:
Q(t ) (1 e
t
)(1 e
t
) 1 2e
t
e
2t
16
指数分布(举例)
• 系统的工作概率为:
R(t ) 2e
t
e
2t
• 系统平均持续工作时间为:
m (2e t e 2 t ) dt
3 1 2 4 5
1
2 5
6
7 8 5
• 解:求解步骤:将元件3、4归并为等效元件6;将元件1、2和等 效元件6归并为等效元件7;最后归并元件5和等效元件7得到等 效元件8。等效元件8的可靠性即为系统的可靠性。
28
串并联系统的可靠性(算例)
3 1 2 4 5
1
2 5
6
7 8 5
Q6 Q3Q4 Q7 1 (1 Q1 )(1 Q2 )(1 Q3 )
A E B D C
A A B C1 C D D E C2 C3
B C E C4
QS P(C1 C2 C3 Ci Cn )
PC1 PC2 PC3 PC4 P(C1 C2 ) ... P(C1 C2 C3 ) ... P(C1 C2 C3 C4 )
• 如QA= QB= QC= QD= QE= QA,则QS=2Q2+2Q3-5Q4+2Q5。 • 因R=0.99,故Q=1-0.99=0.01,从而:QS=0.0020195,
RS=0.99979805。
33
复杂结构割集法(割集与割集的可靠性关系)
A E B D C
3-3系统可靠性

MTBF A MTBF MTTR
MTBF——平均无故障工作时间(平均寿命) Mean Time Between Failures MTTR——平均修理时间Mean Time To Repair MTTF——全称是Mean Time To Failure,即平 均无故障时间。系统平均能够正常运行多长时间 ,才发生一次故障。系统的可靠性越高,平均无 故障时间越长。(MTBF=MTTF+MTTR) 采矿中常用“有效度”的概念(完好率)。
系统可靠性
概述
可靠性是一门综合技术,在设计阶段和生产时期 应分析系统所具备的可靠性水平,把它作为评价 系统好坏的主要指标之一。 苏联在70年代就对煤矿设计和生产中系统可靠性 提出了具体要求,目前我国正加强对系统可靠性 在煤矿中应用的研宄工作。 提高系统的可靠性,也增加系统的正常工作时间 ,减少故障时间,是达到稳产高产和提高经济效 益必不可少的条件。
某系统由三台运输机组成,如图3-10所示:a、b 、c的有效度分别为: Aa = 0.9, Ab = 0.92, Ac = 0.8 1)求系统的有效度, 2)如何改进三条运输机的结构,提高系统的有 效度。 解: 1)A = (1―(1―Aa)(1―Ab))*Ac = (1―(1-0.9)(1-0.92))*0.8 = (1―0.1*0.08)*0.8 = 0.7936
a.出故障的是哪一台; b.什么时间出的故障; c.中途是否经过修理等等。
但可靠度R(120) = 0.96 则要求100台设备中有 96台设备能无故障地工作120小时,显然可靠度 要求是高的。
常用平均有效度:
A
1
1
μ—— 平均修复率,次/min λ—— 平均故障时间,min/次
第二章 第三节 系统的可靠性分析

R(t ) R1 (t ) R 2 (t ) F3 (t ) R1 (t ) F2 (t ) R3 (t ) (3-1-16) F1 (t ) R 2 (t ) R3 (t ) R1 (t ) R 2 (t ) R3 (t )
如单元的寿命服从指数分布,即
有
Ri (t ) e i t
Ri (t ) P( X i t ) , i 1,2 ,n ,
且它们相互独立。由定义知系统寿命X等于各单元寿命
X max( X 1 , X 2 , , X n ) 。 Xi中的最大者,即 所以并联系统的可靠度函数为 (3-1-8)
R(t ) P( X t ) P[max( X 1 , X 2 , , X n ) t ] 1 P[max( X 1 , X 2 , , X n ) t ] 1 P( X 1 t , X 2 t , , X n t ) 1 II[1 t ) 2R0 (t )
1 1 1 1 1 2 2 3 1 3 1 2 3
(3-1-19)
特别,当各单元失效率都为时,有 3t 2 t
F (t ) 1 2e
3e
(3-1-20)
4.1 系统可靠性框图的建立
在分析系统可告靠性时,常常要将系统的工程
结构图转换成系统的可靠性框图,再根据可靠 性框图以及组成系统各单元所具有的可靠性特 征量,计算出所设计系统的可靠性特征量。 系统的工程结构图是表示组成系统的单元之间 的物理关系和工作关系,而可靠性框图则是表示 系统的功能与组成系统的单元之间的可靠性功 能关系。可靠性框图与工程结构图并不完全等 价。
第四章 系统的可靠性分析
可靠性工程02

逻辑关系?
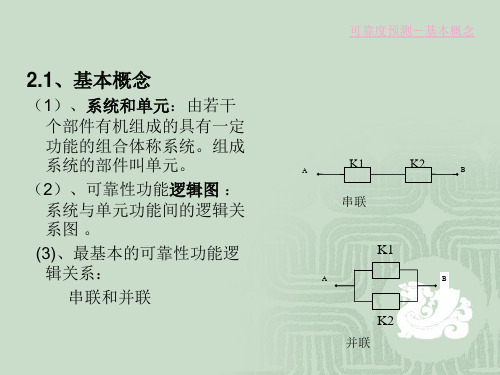
1.可靠性功能逻辑图
如果研究的是液体“流通”:1、2都实现自己的功能“开 启”,系统才能实现液体“流通”。其逻辑框图为:
1
2
A
B
如果研究的是液体“被截流”:1、2只要有一个功能正 常“关闭”,系统就可实现“被截流”。其逻辑框图为:
1
A
B
2
1.可靠性功能逻辑图
若已知逻辑图和每个单元的工作概率或故障概率,则 通过适当的运算,可求得整个系统的工作概率(可靠 度)、故障概率(不可靠度)、MTTF等可靠性特征量 (指标)。
主要研究几种常用的典型系统及其可靠性特征量的计 算方法。
假设: ① 系统、单元均有两种状态正常与失效; ② 各单元所处的状态是相互独立的。
2.串联系统
A
1
2
B
n
特征:n个单元全部正常工作时,系统正常工作;
只要有一个单元失效,系统即失效。
设:
- 系统正常工作状态 - 系统故障状态
- 单元 i 处于正常工作状态(i= 1,2,…,n) - 单元 i 处于故障状态(i = 1,2,…,n)
=
=
=
=
=
=
=
=
=
=
(设各单元状态相互独立)
= =
3.并联系统
若各单元寿命均服从指数分布,λi , =
当n = 2时, = =
=
3.并联系统
经分析,并联系统 > 之最大值,n越大, 越高
,但并联单元多,结构尺寸大,重量、造价高,且
缓慢
n
∴通常取 n = 2~3 。
4.混联系统
1) 一般混联系统(由串联、并联混合组成的系统)
1) 全概率分解法 根据全概率公式
可靠性原理_孙有朝_第一章可靠性概论
0
− λ ( t ) dt
t
1.2 可靠性特征量
当λ (t ) = λ时,R(t ) = e (指数分布)
f (t ) = λ (t ) R(t ) = λ (t ) e ∫0
− λ ( t ) dt
t
− λt
1.2 可靠性特征量
典型失效曲线:
1.2 可靠性特征量
3.平均寿命 ①MTTF(Mean Time To Failures) 1 N MTTF = ∑ t N i =1 i ②MTBF(Mean Time Between Failures) N n
可靠性工程:是对产品的失效及其发生概率进 可靠性工程 行统计分析,对产品进行R设计、R预计、R试 验、R评估、R检验、R控制、R维修、R管理等 的一门包含了许多工程技术的边缘性的工程学 科。
本课程主要研究的是可靠性工程的相关问题。
1.1可靠性的定义
可靠性:产品在规定的条件下和规定的时间内 可靠性 完成规定功能的能力。
1 d = n(t ) N − n(t ) dt
n(t ) F (t ) = N
1.2 可靠性特征量
1 d = ( N ⋅ F (t )) N − n(t ) dt
1 dF (t ) = N⋅ N − n(t ) d (t )
1 = ⋅ f (t ) N − n(t ) N 1 1 f (t ) = ⋅ f (t ) = ⋅ f (t ) = n (t ) 1 − F (t ) R (t ) 1− N
可修复系统可靠性

四、计算齐次马尔柯夫可修系统可靠性特征 量的方法和步骤 下面以单部件可修复系统为例,说明计算 齐次马尔柯夫可修系统可靠性特征量的方 法和步骤。为了讨论方便,我们作如下假 定: (1)组成系统的部件的寿命和维修时间的 分布均为指数分布; (2) X (t )表示系统在时刻t的状态; (3)每个部件所处状态是相互独立的。
i i
P[ X (tn ) xn | X (t1 ) x1 , X (t2 ) x2 ,, X (tn 1 ) xn 1 ] P[ X (tn ) xn | X (tn 1 ) xn 1 ], xn R
(6-15)
则称为马尔柯夫过程。
马尔柯夫过程可以按时间和状态是连续的 或是离散的进行分类: (1)时间与状态均为离散的马尔柯夫过程, 称为离散时间马尔柯夫链; (2)时间连续但状态离散的马尔柯夫过程, 称为时间连续马尔柯夫链; (3)时间与状态均为连续的马尔柯夫过程, 称为连续马尔柯夫过程。 本节主要介绍在可修系统可靠性分析中广 泛应用的连续时间的马尔柯夫链的概念及 其基本性质。
维修性特征量和可靠性特征量的关系
1、 对应关系 M(t)与F(t)、m(t)与f(t)、μ(t)与λ (t)、MTBF与MTTR是——对应的; 2、区别 可靠性指标依据的是从开始工作到故障发生的 时间(寿命)数据,而维修性指标依据的是发 生故障后进行维修所花费的时间——修复时间 数据。两者相比,维修时间数据比寿命数据要 小得多。另外,可靠性是由设计、制造、使用 等因素所决定的,而维修性是人为地排除故障, 使产品的功能恢复,因而人为因素影响更大。
n
第三节 串联可修系统
一、n台相同设备、一组维修人员的情况 设在 t 和 t t之间极小的时间t内,n台设备 故障率均为 ,修复率均为 时,用1表示系 统正常工作,用2表示系统处于故障状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当 m1 m 2 ... mn m, 且 Rij (t) R t 时
R s t = 1 1 R t
m n
4.混联系统
3)
并-串联系统
11 12 1n1
i=1,2,…,m
21 22 2n2
j=1,2,…,n
ij
第i行
m1
m2
mnm
4.混联系统
每一行视为一个子系统,求出各子系统的Ri ,再求得Rs n R i t = R ij
s
R s t
=
n i i R i t 1 R t Cn i个正常工作, n i个单元失效 ir n
i为正常工作单元数,i=r,r+1,…,n时系统都可正常工作。
式中:
C ni
n! i!n i !
5.表决系统(r/n)
又r/n系统,当r=n时,n/n系统,即为串联系统 当r=1时,1/n系统,即为并联系统 各系统单元相同,且均服从指数分布时,失效率为λ; n i i t t n i 则 R t 1 e C e
t n k
5.表决系统(r/n)
1 k e k t 1 e t C n 1 = n k
nk
0
1 e t
0
nk
=
k C n 1
n k
k nk k
n!
1
0
n
由此可知,串联后仍服从指数分布: 。
S
i 1
n
i
, S
1
s
3.并联系统
1 2 A B
3
Ai
特征:任一单元正常工作,子系统即正常工作;只有所有单 元均失效,系统才失效。 设:A - 系统正常状态 A - 系统故障 Ai - 单元 i 处于正常工作状态(i = 1,2,…,n) i - 单元 i 处于故障状态
R s 3 t R s 4 t R 8 t
1 1 R 6 t 1 R 7 t
R 1 t R 2 t R 3 t
R 4 t R 5 t
0
R s t dt
R s t R s t
4.混联系统
2)
串-并联系统
s
0
R s t dt , t
R s t R s t
5.表决系统(r/n)
对上述“2/3”子系统也可以表示为:
1 1 2 3
2
3
由此,按前述并、串联系统的计算方法即可求得系 统的可靠性特征量。
5.表决系统(r/n)
一般,对于n个相同单元( R t )组成的r/n表决系 统,由于各单元只有两个状态,因此r/n系统失效 概率 R t 可表示为:
1 nk
k !n k !
i=k+1时,(1)成立, (1)式成立。
6.旁联系统(非工作贮备系统)
1 故障检测和转换装置 R0(t) 2
n
设贮备单元完全可靠(由于单元受环境的影响, 单元贮备期间也可能失效,此部分内容这里不讲, 而只讲贮备单元完全可靠的情况)
6.旁联系统(非工作贮备系统)
当i=1时,1 t Cn e 1 e t
0
n 1
dt
1 e
n
0
t n 1
d 1 e t
0
上式成立。 设i=k(1≤k<n)时等式成立, 即 k k t t n k
n 1 1 e t n
s
ir
n
此时 s R s t dt C
0 ir
n
i n
0
e
i t
1 e
t n i
dt
ir
n
1 i
用数学归纳法可以证明:
C
i n
0
e
i t
1 e
t n i
dt
1 i
(1)
5.表决系统(r/n)
则
A 1 2 n i
i 1
n
1 2 n i
i 1
n
2.串联系统
由上式:
=
n i i 1
n
(Ai 之间相互独立)
= ( i )
i 1
R s t = R i (t ) i 1 上式表明,在串联系统中,系统的可靠度是元件(单元)可靠度乘积。
i=1,2,…,mj j=1,2,…,n
11 12 1n
21
22
2n
ij m11 m22 mnn
第j列
4.混联系统
每一列视为一个子系统,求出各子系统的Rj ,再相乘即得Rs
R j t 1 1 R ij t
i 1
n n
mj
mj R s t R j 1 1 R ij t j 1 j 1 i 1
子系统 1 2 3 6 8 4 5 7
等效单元 S1 6 8 S2 7
S3
S4
8
4.混联系统
其中
R s t
R s 3 t R s 4 t
R s1 t
R s 2 t
s
s t
= = = = = = =
1 1 R s1 t 1 R s2 t
2
1.可靠性功能逻辑图
若已知逻辑图和每个单元的工作概率或故障概率,则 通过适当的运算,可求得整个系统的工作概率(可靠 度)、故障概率(不可靠度)、MTTF等可靠性特征量 (指标)。 本章主要研究几种常用的典型系统及其可靠性特征量 的计算方法。 假设: ① 系统、单元均有两种状态正常与失效; ② 各单元所处的状态是相互独立的。
m
5.表决系统(r/n)
1 2 r/n 以 1 1 2/3 为例
n
1
特征:n个单元中只要有r个单元正常工作系统就能正常工作。 设: Ai - 单元i处于正常工作状态(i = 1,2,3) A - 系统处于正常工作状态 则 A A1 A 2 A1 A 3 A 2 A 3 设Ai 间相互独立,但事件Ⅰ:A1∩A2 ,Ⅱ:A1∩A3,Ⅲ:A2∩A3 Ⅰ,Ⅱ,Ⅲ 相容
C1 C2 A B
1.可靠性功能逻辑图
如果分析的是开路失效,当两个电容同时失效,才会 引起系统失效。其逻辑框图为: C1
A B
C2 1
2
例:
A
B
1.可靠性功能逻辑图
如果研究的是液体“流通”:1、2都实现自己的功能 “开启”,系统才能实现液体“流通”。其逻辑框图 为: 1 2
A B
如果研究的是液体“被截流”:1、2只要有一个功能 1 正常“关闭”,系统就可实现“被截流”。其逻辑框 A B 图为:
s 1 2 n i , i 单元 i的平均寿命
2.串联系统
A B 1 2 n
特征:n个单元全部正常工作时,系统正常工作; AA 只要有一个单元失效,系统即失效。
i
设: A- 系统正常工作状态 Ai- 系统故障状态 Ai - 单元 i 处于正常工作状态(i= 1,2,…,n) A i - 单元 i 处于故障状态(i = 1,2,…,n)
2.串联系统
1 2 1
2
e 1 t e 2 t e 1 2 t
3.并联系统
经分析,并联系统 < 之最大值,n越大,越高,但并联单
元多,结构尺寸大,重量、造价高,且
R s t
缓慢
n
∴通常取 n = 2~3 。
4.混联系统
1)
一般混联系统(由串联、并联混合组成的系统)
1 e
de k t
t n k
e k t k dt
nk
k 1 = Cn
0
e k t 1 e t
dt
=
C
k 1 n
k n k C n k
1
1
1 n! 1
= k 1!n k 1! 1 = k 1 ∴ ∴
5.表决系统(r/n)
R s t
P(A) = P(A1∩A2)+P(A1∩A3)+P(A2∩A3) -[ P(Ⅰ∩Ⅱ)+P(Ⅰ∩Ⅲ)+P(Ⅱ∩Ⅲ)]+ P[Ⅰ∩Ⅱ∩Ⅲ ]
= P(A1∩A2)+P(A1∩A3)+P(A2∩A3) -[ P(A1∩A2∩A3)+P(A1∩A2∩A3)+P(A1∩A2∩A3)] +P(A1∩A2∩A3) = P(A1∩A2)+P(A1∩A3)+P(A2∩A3)-2 P(A1∩A2∩A3) = P(A1)P(A2)+P(A1)P(A3)+P(A2)P(A3)-2P(A1)P(A2) P(A3)
=
R 1 t R 2 t R 1 t R 3 t R 2 t R 3 t
-2R 1 t R 2 t R 3 t
5.表决系统(r/n)
当各单元相同时:
R i t R t ; R s t 3R 2 t 2 R 3 t
i
j 1
R s t = 1 1 R i t i 1