上、下位机通信协议分析
工业自动化中的网络通信协议

工业自动化中的网络通信协议工业自动化是指利用各种技术手段对工厂或生产线上的各种生产过程进行自动控制和管理的技术体系。
在现代工业生产中,网络通信协议在实现工业自动化过程中起着至关重要的作用。
本文将介绍几种常见的工业自动化中使用的网络通信协议。
一、Modbus协议Modbus是一种经典的串行通信协议,被广泛应用于工业自动化领域。
它采用主从结构,通过串口传输数据,将上位机(主站)与下位机(从站)进行连接。
Modbus协议简单易用,适用于控制器之间的通信,如PLC、仪器设备等,具有广泛的兼容性和可扩展性。
二、Profibus协议Profibus是一种常用的工业现场总线通信协议,用于实现自动化系统中各种设备的通信。
它支持多种传输介质,包括RS485、光纤等,适用于不同的工业环境。
Profibus协议具有高速传输、实时性能好等特点,广泛应用于工厂自动化和过程自动化领域。
三、Ethernet/IP协议Ethernet/IP是一种工业以太网通信协议,基于标准的以太网技术,使得工业设备可以通过以太网进行连接和通信。
它支持TCP/IP协议,能够实现工业设备与企业内部网络的集成,为工业自动化提供了更高的灵活性和通用性。
四、CAN协议CAN(Controller Area Network)是一种广泛应用于汽车电子和工业自动化领域的通信协议。
CAN协议采用差分信号传输,具有抗干扰性强、可靠性高等特点。
它适用于多节点分布式控制系统,可以实现设备之间的快速、可靠的通信。
五、Profinet协议Profinet是一种以太网通信协议,是Profibus的以太网扩展。
Profinet协议利用以太网实现工业自动化设备的通信和集成,支持实时通信和无线通信,适用于复杂的工业自动化系统。
六、DeviceNet协议DeviceNet是一种CIP(Common Industrial Protocol)上的一种现场总线通信协议,常用于工业自动化设备的通信。
上位机工作原理
上位机工作原理引言概述:上位机是指与下位机(如传感器、执行器等)进行通信,并对其进行控制和监测的计算机系统。
它在现代工业自动化中起到了至关重要的作用。
本文将详细介绍上位机的工作原理,包括通信方式、数据处理、控制策略等五个方面。
一、通信方式1.1 串口通信:上位机与下位机通过串口进行数据传输,常用的串口通信协议有RS232、RS485等。
上位机通过串口发送指令给下位机,下位机接收到指令后执行相应的操作,并将执行结果通过串口返回给上位机。
1.2 以太网通信:上位机与下位机通过以太网进行数据传输,常用的以太网通信协议有TCP/IP、UDP等。
上位机通过以太网发送指令给下位机,下位机接收到指令后执行相应的操作,并将执行结果通过以太网返回给上位机。
1.3 无线通信:上位机与下位机通过无线方式进行数据传输,常用的无线通信方式有Wi-Fi、蓝牙等。
上位机通过无线方式发送指令给下位机,下位机接收到指令后执行相应的操作,并将执行结果通过无线方式返回给上位机。
二、数据处理2.1 数据采集:上位机通过与下位机通信,获取下位机传感器采集到的数据。
上位机根据通信协议解析下位机发送的数据,并进行数据格式转换,以便后续的数据处理和分析。
2.2 数据存储:上位机将采集到的数据存储在数据库或者文件中,以便后续的数据查询和分析。
上位机可以根据需要设置数据存储的周期和容量,以满足实际应用的需求。
2.3 数据分析:上位机对采集到的数据进行处理和分析,可以通过数据挖掘、统计分析等方法提取数据中的有价值信息。
上位机可以根据分析结果制定相应的控制策略,实现对下位机的精确控制。
三、控制策略3.1 开环控制:上位机根据预先设定的控制策略,发送相应的指令给下位机,下位机执行指令完成相应的任务。
上位机无法实时获得下位机执行结果,控制过程中无法对下位机的状态进行实时调整。
3.2 闭环控制:上位机根据下位机传感器采集到的实时数据,通过反馈控制算法计算出相应的控制指令,发送给下位机。
上位机协议书

上位机协议书甲方(上位机方):_____________________地址:_________________________________法定代表人:__________________________联系电话:__________________________乙方(下位机方):_____________________地址:_________________________________法定代表人:__________________________联系电话:__________________________鉴于甲方作为上位机方,拥有对下位机进行控制、数据交换和通信的能力;乙方作为下位机方,愿意接受甲方的控制并与之进行数据交换和通信。
为明确双方权利义务,经双方协商一致,特订立本协议。
第一条协议目的本协议旨在规定甲方作为上位机方与乙方作为下位机方之间的合作关系,确保双方在技术、数据交换、通信等方面的合作顺利进行。
第二条合作内容1. 甲方负责提供上位机软件及相关技术支持,确保上位机软件能够与乙方的下位机进行有效连接和通信。
2. 乙方负责提供下位机硬件设备,并保证设备的正常运行,确保能够与甲方的上位机软件进行数据交换和通信。
3. 双方应共同维护通信协议的稳定性和安全性,确保数据传输的准确性和完整性。
第三条权利与义务1. 甲方有权对乙方的下位机进行远程控制和管理,但不得干预乙方的内部事务。
2. 乙方有权要求甲方提供必要的技术支持和维护服务,以保证下位机的正常运行。
3. 甲方有义务保证上位机软件的安全性,防止任何可能的数据泄露或被非法访问。
4. 乙方有义务保证下位机的安全性,防止任何可能的数据泄露或被非法访问。
第四条数据保密1. 双方应对在合作过程中获取的对方商业秘密和技术秘密予以保密,未经对方书面同意,不得向第三方披露。
2. 双方应采取一切必要措施,保护合作过程中产生的数据不被泄露。
第五条违约责任1. 如一方违反本协议规定,应承担违约责任,并赔偿对方因此遭受的一切损失。
上位机与下位机串口通信协议

上位机与下位机串口通信协议篇一:基于C#的串口通信上位机和下位机源程序基于单片机串口通信的上位机和下位机实践串口是计算机上一种非常通用设备通信的协议(不要与通用串行总线Universal Serial Bus或者USB混淆)。
大多数计算机包含两个基于RS232的串口。
串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。
同时,串口通信协议也可以用于获取远程采集设备的数据。
串口通信的概念非常简单,串口按位(bit)发送和接收字节。
尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
它很简单并且能够实现远距离通信。
比如IEEE488定义并行通行状态时,规定设备线总常不得超过20米,并且任意两个设备间的长度不得超过2米;而对于串口而言,长度可达1200米。
首先亮出C#的源程序吧。
1主要界面:只是作为简单的运用,可以扩展的。
源代码:using System;using System.Collections.Generic;using ponentModel;using System.Data;using System.Drawing;using System.Text;using System.Windows.Forms;using System.IO.Ports;using System.Timers;namespace 单片机功能控制{public partial class Form1 : Form{public Form1(){InitializeComponent();}SerialPort sp = new SerialPort();private void button1_Click(object sender, EventArgs e) 2{String str1 = comboBox1.Text;//串口号String str2 = comboBox2.Text;//波特率String str3 = comboBox3.Text;//校验位String str4 = comboBox5.Text;//停止位String str5 = comboBox4.Text;//数据位Int32 int2 = Convert.ToInt32(str2);//将字符串转为整型Int32 int5 = Convert.ToInt32(str5);//将字符串转为整型groupBox3.Enabled = true;//LED控制界面变可选try{if (button1.Text == 打开串口){if (str1 == null){MessageBox.Show(请先选择串口~, Error); return; }sp.Close();sp = new SerialPort();sp.PortName = comboBox1.Text;//串口编号sp.BaudRate = int2;//波特率switch (str4)//停止位3{case 1:sp.StopBits = StopBits.One;break;case 1.5:sp.StopBits = StopBits.OnePointFive;break;case 2:sp.StopBits = StopBits.Two;break;default:MessageBox.Show(Error:参数不正确, Error); break;}switch (str3){case NONE:sp.Parity = Parity.None; break;case ODD:sp.Parity = Parity.Odd; break;case EVEN:sp.Parity = Parity.Even; break;default:4MessageBox.Show(Error:参数不正确, Error); break;}sp.DataBits = int5;//数据位sp.Parity = Parity.Even;//设置串口属性sp.Open();//打开串口button1.Text = 关闭串口;textBox1.Text = Convert.ToString(sp.PortName) + 已开启~; }else{sp.Close();button1.Text = 打开串口;groupBox3.Enabled = false;//LED控制界面变灰色textBox1.Text = Convert.ToString(sp.PortName) + 已关闭~; } }catch (Exception er){MessageBox.Show(Error: + er.Message, Error);return;}5}private void Form1_Load(object sender, EventArgs e){//初始化textBox1.Text = 欢迎使用简易的串口助手~;groupBox3.Enabled = false;//LED控制界面变灰色groupBox6.Enabled = false;groupBox7.Enabled = false;groupBox8.Enabled = false;button3.Enabled = false;button6.Enabled = false;timer1.Start();try{foreach (string com in System.IO.Ports.SerialPort.GetPortNames()) 获取串行口名称boBox1.Items.Add(com);//默认设置comboBox1.SelectedIndex = 0;//选择第一个com口comboBox2.SelectedIndex = 4;//波特率4800comboBox3.SelectedIndex = 0;//校验位NONE6comboBox4.SelectedIndex = 0;//停止位为1comboBox5.SelectedIndex = 0;//数据位为8}catch{MessageBox.Show(找不到通讯端口~, 串口调试助手); }}private void timer1_Tick(object sender, EventArgs e){label6.Text = DateTime.Now.ToString();}private void button2_Click(object sender, EventArgs e){try {if (button2.Text == 开启){groupBox6.Enabled = true; radioButton1.Checked = false; radioButton2.Checked = false; radioButton3.Checked = false; radioButton4.Checked = false; checkBox1.Checked = false;7checkBox2.Checked = false; //自动checkBox3.Checked = false; checkBox4.Checked = false; checkBox5.Checked = false; checkBox6.Checked = false; checkBox7.Checked = false; checkBox8.Checked = false; button3.Enabled = true;textBox2.Text = String.Empty; button2.Text = 关闭;}else{groupBox6.Enabled = false; button3.Enabled = false;button2.Text = 开启;textBox2.Text = String.Empty;}}catch (Exception er){MessageBox.Show(Error: + er.Message, Error); return;8}}private void button3_Click(object sender, EventArgs e) {groupBox6.Enabled = true;label7.Text = 已发送;if (textBox2.Text == )MessageBox.Show(发送失败,请选择发送的数据~); else sp.WriteLine(textBox2.Text);//往串口写数据}private void checkBox1_CheckedChanged(object sender, EventArgs e){try {if (checkBox1.Checked){checkBox1.Checked = true;checkBox2.Checked = false;篇二:上位机与下位机之间的连接第一章上位机与下位机1.1 上位机与下位机的概念上位机和下位机,一般是指集中控制系统中的PC机和现场的工控机。
通讯协议分析报告范文
通讯协议分析报告范文通讯协议分析报告一、双方的基本信息甲方:名称:XXX集团有限公司地址:XXX市XXX区XXX路XXX号法定代表人:XXX联系电话:XXX营业执照号码:XXX乙方:名称:XXX通讯有限公司地址:XXX市XXX区XXX路XXX号法定代表人:XXX联系电话:XXX营业执照号码:XXX二、各方身份、权利、义务、履行方式、期限、违约责任(一)甲方身份、权利、义务、履行方式、期限、违约责任甲方为通讯设施运营商,享有通讯业务运营资质,具有相应的技术条件和管理能力。
甲方应遵守国家相关法律法规,为乙方提供符合法律要求的通讯服务。
甲方应按照合同约定和乙方的要求,提供通讯设施、维护设施、提供技术服务等。
甲方应按照约定提供通讯服务,确保服务的安全、稳定、高效。
甲方应保障乙方的通讯权利,遵守保密规定,保护用户通讯隐私。
甲方应按照及时、准确、完整的原则做好账务管理,确保乙方每次交费的情况得到及时反馈,保证用户通讯服务的连续性。
甲方需对通过其通讯设施传递的信息进行监管,防止信息泄漏和传播不良信息,确保平台安全和正常运营。
甲方应保证设施的正常运转,及时发现设备故障,采取有效措施进行修复,确保通讯服务正常进行。
甲方还应定期检查设施状态和指标,确保设施符合国家监管要求,并根据国家相关法律法规,开展网络安全评估和风险评估。
若甲方未能正常履行其在本合同中的义务,乙方有权解除协议,甲方应根据约定赔偿乙方相应损失。
(二)乙方身份、权利、义务、履行方式、期限、违约责任乙方为通讯服务用户,享受在甲方通讯设施上的通讯服务。
乙方有权在甲方规定的范围内合理使用设施,并获得安全、稳定、高效的通讯服务。
乙方有义务依法合规、诚信使用通讯服务,不得从事违法、违规活动,不得扰乱网络秩序,不得侵犯他人合法权益,不得对传输的信息进行任何形式的非法篡改、过滤等行为。
乙方应按照合同约定及时支付通讯服务费用,确保通讯服务的连续性。
乙方有义务妥善保管账户信息和密码,并承担因账户信息泄露、密码泄露等原因所产生的风险和责任。
上位机下位机串口通信分析

5 图3-2 8253定时器/计数器电路原理图 3.2.38250串口接口电路 (1)电路原理 该电路由一片8250,一片MAX232组成,该电路所有信号线均已接好。原理图如下: 图3-3 8250串行接口电路原理图 3.2.4 8259A中断控制电路 (1)电路原理 CS8259是8259芯片的片选插孔,IR0~IR7是8259的中断申请输入插孔。DDBUS是系统8位数据总线。INT插孔是8259向8086CPU的中断申请线,INTA是8086的中断应答信号。
6 图3-4 8259中断控制器电路原理图 3.2.5硬件系统地址分配说明 下位机: CS0: 0809 CS1:CS244 CS2:CS273 CS4:8253 CS5:8259
7 3.3软件主要模块流程图与说明 下位机工作流程图:
考核记录及成绩评定 题目 双机数据采集系统设计 完成的主要工作 基本功能:实现数据采集,双机通信和基本形式的数据显示。其中下位机用数码管显示(或液晶屏)显示。具体实现要求: (1) 上位机发送一个启动命令(自己定义命令的格式和内容)给下位机; (2) 下位机接收到启动命令后开始采集1路模拟量数据(用电位器模拟实现)和1路开关量数据,并将模拟量转换成数字量在数码管(或液晶屏)上实时显示,然后把模拟量数据和开关量数据发送给上位机; (3) 上位机接收到数据后在显示器上显示。 成员分工 成员曹晓露进行资料的搜集,下位机的连线和程序的调试,成员范凯锋负责实验代码的编写以及相应流程图,成员唐绍波进行实验报告的撰写及相关画图。 综合评语(设计方案、实践环节、问题解答、设计报告) 成绩 2220133293 范凯锋 2220132642 唐绍波 2220130079 曹晓露
4 3.2硬件设计 3.2.1 A/D转换的基本原理 A/D转换就是模数转换,顾名思义,就是把模拟信号转换成数字信号。 A/D转换器是用来通过一定的电路将模拟量转变为数字量。模拟量可以是电压、电流等电信号,也可以是压力、温度、湿度、位移、声音等非电信号。但在A/D转换前,输入到A/D转换器的输入信号必须经各种传感器把各种物理量转换成电压信号。 A/D转换后,输出的数字信号可以有8位、10位、12位和16位等。 A/D转换器的工作原理主要有以下三种方法:逐次逼近法、双积分法、电压频率转换法。 A/D转具有如下几个技术指标: 1)分辩率指数字量变化一个最小量时模拟信号的变化量,定义为满刻度与2^n的比值。分辩率又称精度,通常以数字信号的位数来表示。 2)转换速率是指完成一次从模拟转换到数字的AD转换所需的时间的倒数。积分型AD的转换时间是毫秒级属低速AD,逐次比 较型AD是微秒级属中速AD,全并行/串并行型AD可达到纳秒级。采样时间则是另外一个概念,是指两次转换的间隔。为了保证转换的正确完成,采样速率必须小于或等于转换速率。因此有人习惯上将转换速率在数值上等同于采样速率也是可以接受的。常用单位是ksps和Msps,表 示每秒采样千/百万次。 3)量化误差由于AD的有限分辩率而引起的误差,即有限分辩率AD的阶梯状转移特性曲线与无限分辩率AD(理想AD)的转移特 性曲线(直线)之间的最大偏差。通常是1 个或半个最小数字量的模拟变化量,表示为1LSB、1/2LSB。 4)偏移误差输入信号为零时输出信号不为零的值,可外接电位器调至最小。 5)满刻度误差满度输出时对应的输入信号与理想输入信号值之差。 6)线性度实际转换器的转移函数与理想直线的最大偏移,不包括以上三种误差。 3.2.28253定时器/计数器电路 (1)电路原理 该电路由1片8253组成,8253的片选输入端插孔CS8253,数据口,地址,读写线均已接好,T0、T1、T2时钟输入分别为8253CLK0、8253CLK1、8253CLK2。定时器输出,GATE控制孔对应如下:OUT0、GATE0、OUT1、GATE1、OUT2、GATE2、CLK2。原理图如下: 注:GATE信号无输入时为高电平
上位机、下位机通信实例
上位机、下位机通信实例摘要:1.上位机与下位机通信的基本概念2.上位机与下位机通信的方式3.通信实例介绍4.通信实例的应用场景5.通信实例的优势与不足正文:一、上位机与下位机通信的基本概念上位机和下位机通信是指在计算机控制系统中,上位机(通常为控制中心或主计算机)与下位机(通常为现场控制器或执行器)之间的信息交换。
上位机主要负责数据处理、逻辑控制和决策等任务,而下位机则主要负责现场设备的运行控制。
两者之间的通信是实现自动化控制系统正常运行的关键。
二、上位机与下位机通信的方式上位机与下位机之间的通信方式主要有串行通信、并行通信和网络通信等。
其中,串行通信和并行通信是硬件层面的通信方式,而网络通信则是基于计算机网络的通信方式。
1.串行通信:串行通信是指上位机与下位机之间通过串行接口进行数据传输。
它具有线路简单、成本低的优点,但传输速率相对较低。
2.并行通信:并行通信是指上位机与下位机之间通过并行接口进行数据传输。
它具有传输速率快的优点,但需要较多的线路和硬件资源。
3.网络通信:网络通信是指上位机与下位机之间通过网络进行数据传输。
它可以实现远程控制和实时数据交互,但需要建立稳定的网络环境和较高的网络带宽。
三、通信实例介绍以下是一个典型的上位机与下位机通信实例:假设有一个自动化生产线系统,上位机负责生产任务的分配和调度,下位机负责具体的设备运行控制。
在这个系统中,上位机需要实时获取下位机的运行状态和数据,并根据生产任务进行调整。
同时,下位机也需要根据上位机的指令来执行相应的操作。
四、通信实例的应用场景上位机与下位机通信实例在许多领域都有应用,如工业自动化、楼宇自控、智能交通等。
在这些领域中,上位机与下位机通信实例可以实现设备的远程监控、实时数据采集和智能决策等功能,从而提高系统的运行效率和可靠性。
五、通信实例的优势与不足上位机与下位机通信实例具有以下优势:1.提高系统的自动化水平,降低人工干预成本。
2.实现远程监控和控制,方便管理人员进行决策。
上位机与下位机之间的通信编程

上位机与下位机之间的通信编程
上位机与下位机之间的通信编程是一项重要的技术,在现代工业控制和自动化领域得到了广泛的应用。
上位机通常是指计算机或其他控制设备,它们通过网络或串口等方式与下位机进行数据交换和控制命令传输。
通信编程的目的是实现上位机与下位机之间的数据传输和命令控制,主要包括以下方面:
1. 通信协议的选择:为了实现通信,上位机与下位机需要使用一种通信协议,常见的协议有Modbus、CAN、TCP/IP等。
2. 通信接口的编程:上位机与下位机的通信需要通过网络或串口等接口进行,编程时需要实现接口的初始化、数据收发等操作。
3. 数据封装和解析:通信传输的数据需要进行封装和解析,以确保数据的正确性和可靠性。
4. 控制命令的传输:上位机可以通过控制命令对下位机进行控制,命令的传输需要进行协议设计和数据封装。
5. 数据处理和显示:上位机从下位机接收到的数据需要进行处理和显示,以便用户进行监测和控制。
在通信编程过程中,需要注意以下几点:
1. 数据传输的可靠性和实时性是关键,需要进行严格的测试和验证。
2. 编程时需要考虑到不同硬件和操作系统的兼容性问题。
3. 通信协议的选择和设计需要满足实际应用的需求。
4. 数据的安全性也需要考虑,特别是在涉及机密信息的应用中。
总之,上位机与下位机之间的通信编程是一项复杂而重要的技术,需要开发人员具备扎实的编程技能和广泛的实际应用经验。
上下位机通信方案(新改)
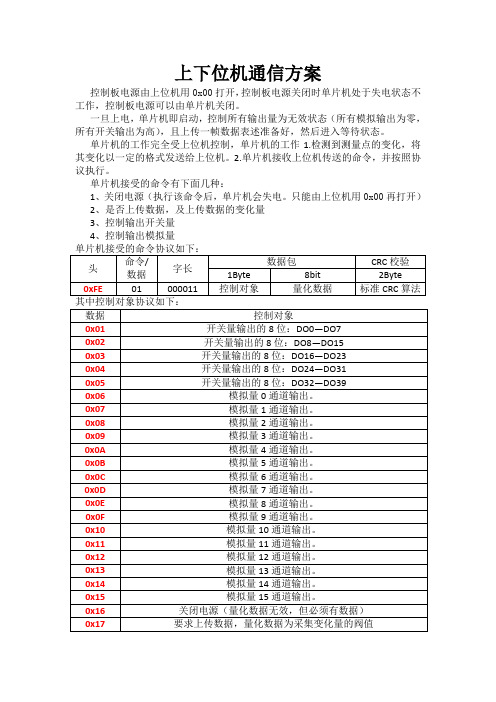
上下位机通信方案控制板电源由上位机用0x00打开,控制板电源关闭时单片机处于失电状态不工作,控制板电源可以由单片机关闭。
一旦上电,单片机即启动,控制所有输出量为无效状态(所有模拟输出为零,所有开关输出为高),且上传一帧数据表述准备好,然后进入等待状态。
单片机的工作完全受上位机控制,单片机的工作1.检测到测量点的变化,将其变化以一定的格式发送给上位机。
2.单片机接收上位机传送的命令,并按照协议执行。
单片机接受的命令有下面几种:1、关闭电源(执行该命令后,单片机会失电。
只能由上位机用0x00再打开)2、是否上传数据,及上传数据的变化量3、控制输出开关量4、控制输出模拟量握手协议:通讯双方在每次通讯时,接收方返回应答帧校验正确,返回0xFC校验错误,返回0xFD 同时丢掉当前帧,对方将从发此帧注:应答帧只发送一个字节面板指示编号:(具体编号由上位机拟定)数字输出量1 电源指示灯0xA0 61 DO02 预热塞加热指示灯62 DO13 加油泵指示灯63 DO24 急停警示指示灯64 DO35 无65 DO46 系统I 气泡观察0xC1 66 DO57 系统I仪表照明指示灯67 DO68 系统I 0-28Mpa指示灯68 DO79 系统I 主泵卸荷指示灯69 DO810 系统I自循环指示灯70 DO911 系统I输出指示灯71 DO1012 系统II 气泡观察0xC2 72 DO1113 系统II车厢照明指示灯73 DO1214系统II 0-28Mpa指示灯74 DO1315系统II主泵卸荷指示灯75 DO1416系统II 自循环指示灯76 DO1517系统II 输出指示灯77 DO1618 系统I开式灯78 DO1719 系统I 闭式灯79 DO1820系统II 开式灯0Xbf 80 DO1921系统II 闭式灯0xC0 81 DO2022 液位低指示灯82 DO2123 发电机故障指示灯83 DO2224 机油压力故障指示灯84 DO2325 空气滤故障指示灯85 DO2426 液位高指示灯86 DO2527 系统I低出滤指示灯87 DO2628 系统I 高粗滤指示灯0Xaf 88 DO2729 系统I高精滤I指示灯0xB0 89 DO2830 系统I 高精滤II指示灯90 DO2931 系统I压力报警指示灯91 DO30 32系统II 低出滤指示灯92 DO31 33系统II高粗滤指示灯93 DO32 34系统II 高精滤I指示灯94 DO33 35系统II高精滤II指示灯95 DO34 36系统II 压力报警指示灯96 DO3540 V5039 SHCLK38 SHDAT37 SHRET36 GND31 GND30 GND数字输入量1电源开关0xE0 23 DI02预热塞加热开关22 DI13加油泵开关21 DI24紧急停车按钮20 DI35油门启动按钮19 DI46系统I 气泡观察18 DI57系统I 仪表照明开关17 DI68系统I 0-28Mpa开关16 DI79系统I 主泵卸荷15 DI810系统I 自循环14 DI911系统I 输出13 D1012系统II 气泡观察12 D1113系统II 车厢照明11 DI214系统II 0-28Mpa开关10 DI1315系统II 主泵卸荷9 DI1416系统II 自循环0xEF 8 DI1517系统II 输出0xF0 7 DI1618系统I 开式开关0xF1 6 DI1719系统I 闭式开关0xF2 5 DI1820系统II 开式开关0xF3 4 DI1921系统II 闭式开关0xF4 3 DI2041 V120 模拟输出量1.电流0xD0 42 AO0 2.柴油油量43 AO1 3.汽缸盖温度44 AO2 4.机油温度45 AO3 5.机油压力46 AO4 6.转速47 AO5 7.系统I 输出压力48 AO6 8.系统I 辅助压力49 AO7 9.系统I 回油压力50 AO8 10.系统I 流量51 AO9 11.系统I 温度52 AO10 12.系统II 输出压力53 AO11 13.系统II 辅助压力54 AO12 14.系统II 回油压力55 AO13 15.系统II 流量56 AO14 16.系统II 温度0Xdf 57 AO1560 V120模拟输入量1.油门0x90 1 AI12.系统I 压力调节0x91 2 AI23.系统II 压力调节0x92 3 AI3。
(4条消息)上位机与下位机的通讯
(4条消息)上位机与下位机的通讯一、概念**上位机:**是指人可以直接发出操作命令的计算机,一般指PC、人机界面等。
发出的命令首先给下位机,下位机再根据命令解释成相应的时序信号,直接控制相应设备。
**下位机:**直接控制设备获取设备状况的计算机,一般指PLC、智能仪表、智能模块等。
不时读取设备状态数据,转换成数字信号反馈给上位机。
下位机要和和上位机通讯,可以把下位机分为前端通讯部分和后台管理部分。
下位机工作在这样一个场景,上位机发一条指令,下位机执行,然后反馈结果。
前端通讯代表了下位机与上位机之间通讯的部分,而后台管理代表了动作的执行或者反馈给上位机需要的数据。
前端通信可以分为四个部分:接收、解析、处理、返回。
1)接收:需要保证接收数据的完整性2)解析:对接收到的数据进行解析,解析方式按照协议规则,得到指令字与数据,为接下来的处理提供依据。
3)处理:得到了需要执行的指令和数据,根据不同指令做出不同的处理,这就需要后台管理部分进行处理。
4)返回:处理以后,将数据返回,可以是指令也可以是上位机所请求的数据。
**后台管理:**一般处于长期运行的状态,下位机往往会接很多传感器,那么后台的主要职能为:数据的采集、加工、更新、存储以及动作的执行。
往往它会处于数据准备阶段,当上位机需要反馈数据时它将数据反馈,当上位机需要执行某个动作时,它会执行某个动作。
二、上位机和下位机的通讯上位机和下位机的通讯方式,大多取决于下位机。
通常上位机和下位机通讯可以采用不同的通讯协议,如RS232串口通讯、RS485串行通讯和CAN总线通信。
我们现在的底盘上的说明书上写出了底盘的通讯控制协议:RS232串口通信和CAN总线通信。
1.可以用无线串口通信,比如蓝牙。
通过串口把指令传给PC端蓝牙,PC端蓝牙把数据传送给底盘上的蓝牙,蓝牙通过串口把指令传送给底盘,进行底盘的控制。
2.还有一种控制方式就是仍然通过遥控器发送信号给底盘,而PC 端通过串口连接遥控器即可。
上下位机通信报告(DOC)
程序设计实训报告——基于C语言的上下位机通信设计1.绪论现代化集中管理需要对现场数据进行统计、分析、制表、打印、绘图、报警等,同时,又要求对现场装置进行实时控制,完成各种规定操作,达到集中管理的目的。
加之单片机的计算能力有限,难以进行复杂的数据处理。
因此在功能比较复杂的控制系统中,通常以PC机为上位机,单片机为下位机,由单片机完成数据的采集及对装置的控制,而由上位机完成各种复杂的数据处理及对单片机的控制。
在工业控制系统中,各种数据的采集和执行机构的控制都是由下位机或探测站来完成。
由于单片机具有体积小、价格低廉、可应用于恶劣工业环境的特点,在分布式控制系统中大多采用单片机作为下位机来进行数据采集和现场控制。
在这些应用中,单片机只是直接面向被控对象底层。
而对采集到的数据进行进一步分析和处理的工作是由功能强大的主控PC机来完成的。
因此,PC机和单片机之间就有着大量的数据交换。
通常PC机和单片机之间的通信是通过串行总线STM32实现的。
因此采用一种以MAX232为核心的通信接口电路。
该接口电路适用于由一台PC机与多个8051单片机串行通信的设计,其原理和方法同样适用于PC机与其它单片机之间的串行数据通信。
告串口通讯对单片机而言意义重大,不但可以实现将单片机的数据传输到电脑端,而且也能实现PC对单片机的控制而且对在机电控制中具有十分重要的地位,掌握串口通信的实现方法以及上下位机的通信原理对日后进行机电控制的开发具有深远意义。
2. 总体设计与方案选择2.1 方案选择上位机选用window 7 旗舰版操作系统;下位机选用arm单片机,ARM单片机是以ARM处理器为核心的一种单片微型计算机,是近年来随着电子设备智能化和网络化程度不断提高而出现的新兴产物。
arm单片机以其低功耗和高性价比的优势逐渐步入高端市场,成为了时下的主流产品。
ARM单片机采用了新型的32位ARM核处理器,使其在指令系统,总线结构,调试技术,功耗以及性价比等方面都超过了传统的51系列单片机,同时arm单片机在芯片内部集成了大量的片内外设,所以功能和可靠性都大大提高。
单片机通讯协议(非常经典)
这里所说的数据协议是建立在物理层之上的通信数据包格式。所谓通信的物理层就是指我 们通常所用到的RS232、RS485、红外、光纤、无线等等通信方式。在这个层面上,底层软 件提供两个基本的操作函数:发送一个字节数据、接收一个字节数据。所有的数据协议全 部建立在这两个操作方法之上。 通信中的数据往往以数据包的形式进行传送的,我们把这样的一个数据包称作为一帧数据 。类似于网络通信中的TCPIP协议一般,比较可靠的通信协议往往包含有以下几个组成部 分:帧头、地址信息、数据类型、数据长度、数据块、校验码、帧尾。
以下给出具体的实例。在这个系统中,串口的命令非常简单。所有的协议全部在串口中断 中进行。数据包的格式如下:
0x55, 0xAA, 0x7E, 0x12, 0xF0, 0x02, 0x23, 0x45, SUM, XOR, 0x0D
其中0x55,
0xAA,
0x7E为数据帧的帧头,0x0D为帧尾,0x12为设备的目的地址,0xF0为源地址,0x02为数据
} else if(state_machine == 10) {
if(0x0D == rcvdat) // 判断是否接收到帧尾结束符 {
retval = 0xaa; // 置标志,表示一个数据包接收到 } state_machine = 0; // 复位状态机 }
此过程中,使用了一个变量state_machine作为协议状态机的转换状态,用于确定当前字节 处于一帧数据中的那个部位,同时在接收过程中自动对接收数据进行校验和处理,在数据 包接收完的同时也进行了校验的比较。因此当帧尾结束符接收到的时候,则表示一帧数据 已经接收完毕,并且通过了校验,关键数据也保存到了缓冲去中。主程序即可通过retval的 标志位来进行协议的解析处理。
上位机和下位机串行通信设计
——上位机和下位机串行通信设计
2021/10/10
1
主要内容
• 串行通信概述 • 串行通信的设计(分下位机和上位机)
2021/10/10
2
概述
• 在PC的主板上, 有一种接口可能会被 我们忽视,也随着个 人计算机的小型化而 逐步被淘汰,这就是 RS-232C串行接口 ,在Windows系统中 被称为COM端口。
2021/10/10
8
概述
• 异步通信的主要参数: • 波特率 • 起始位和结束位 • 校验位 • 握手方式
2021/10/10
9
概述
• MODBUS通信协议
• 在数据采集系统中,采用MODBUS通信协议可实现计算
机与采集设备(下位机)间的串行通信,实现采集功能。
• 采用有限介质(如RS-232-/422/485)的MODBUS通信协 议的通信模式有2种:
2021/10/10
15
谢谢! 欢迎大家批评指正!
2021/10/10
16
2021/10/10
11
下位机软件设计
串口初始化
串口中断
接收
发送或接收
发 送
地址判断 正确
错误 错误
数
CRC校验
据
正确
命令字类型
01
02
03
操作1 操作2 操作3
2021/10/10
退出
12
下位机软件设计
• CRC校验分为查表校验法和多项式计算法。
查表法是将移位异或的计算结果做成了一个表,就是将0~256放入一个长
2021/10/10
5
概述
• 串行通信的组成
2021/10/10
串口通信协议制定

串口通信协议制定篇一:单片机与上位机通信协议的制定单片机与上位机通信协议的制定单片机和上位机的串口通信协议分为上行协议和下行协议,要分别制定!上行协议,即由单片机向上位机发送数据。
下行协议,即由上位机向单片机发送数据。
而通信协议又要分固定长度和不定长度两种本文所介绍的协议属于简单的固定字长的通信协议!下行协议由四个字节构成上表是简单的上位机对单片机的控制指令下述函数是C#中封装的串口通信类中的发送函数的封装public void SerSendCommu(byte orderDef, byte data)//参数1为命令字,参数二为要发送的数//据,需要时可直接调用{Byte[] BSendTemp = new Byte[SEND_LENTH];BSendTemp[0] = PRE;BSendTemp[1] = orderDef; BSendTemp[2] = data; BSendTemp[3] = END;this.serialPort1.Write(BSendTemp, 0, SEND_LENTH);}下位机中用中断方式接收字符,本文用的是GCC语言,下面是串口接收数据中断 ISR(USART_RXC_vect)//串口接收中断 {unsigned char status,data;status = UCSRA; //**首先读取UCSRA的值,再读取UDR值,顺序不能颠倒,否则读取UDR后的UCSRA的//值即会改变** data = UDR;if(!Uart_RecvFlag)//判断缓存中的数据是否读完,读完则接收指令 {if((status&((1<<FE)|(1<<PE)|(1<<DOR)))==0){rx_buffer[rx_counter]=data; rx_counter++;switch(rx_counter) {case 1:if(data!=USART_BEGIN_STX)rx_counter=0;break; case 4:rx_counter=0;if(data==USART_END_STX) Uart_RecvFlag=1; break; }} }}在单片机主循环程序的最前部分进行指令译码if(Uart_RecvFlag)//接收到命令{switch(rx_buffer[1]) {case 0xAA://单片机状态命令控制;ucWorkStatue=rx_buffer[2];//指令数据 break;case 0xDD://PWM值修改指令 OCR2=rx_buffer[2];break;case 0xFF://初始温度设定 break; }Uart_RecvFlag=0;}//随后进行执行指令switch(ucWorkStatue){case 1://空闲模式 break;case 2://测量模式,但不输出 break;case 3://测量模式,由串口输出break;case 4://PWM输出测试break; default:break;}这样就可以利用串口对单片机进行在线命令控制了;上行协议的制定!和下行协议基本一致!在AVR单片机程序中定义了串口通信输出缓冲区,缓冲区的字长正好为协议的长度;//串口发送缓冲区变量声明volatile unsigned char tx_buffer[TX_BUFFER_SIZE];//定义串口发送缓冲区 volatile unsigned chartx_wr_index=0,tx_rd_index=0,tx_counter=0;//rx_wr_index 写指针,rx_rd_index读指针,rx_counter缓冲区数据个数//USART发送函数void USART_Transmit(unsigned char data)//发送数据函数{while(tx_counter==TX_BUFFER_SIZE);//输出缓冲区满,等待asm("cli");if(tx_counter||((UCSRA & DATA_REGISTER_EMPTY)==0)) {tx_buffer[tx_wr_index]=data;if(++tx_wr_index==TX_BUFFER_SIZE) tx_wr_index=0;++tx_counter;}elseUDR = data;asm("sei");}//发送中断服务程序ISR(USART_TXC_vect)//USART发送数据中断 {if(tx_counter) {--tx_counter;UDR=tx_buffer[tx_rd_index];if(++tx_rd_index==TX_BUFFER_SIZE){tx_rd_index=0;} } }在C#编写的上位机中,利用串口接收事件响应方法定义serialPort1.ReceivedBytesThreshold = RECEIVE_LENTH;在时间响应事件中调用协议分析处理函数serialPortCaculate()来分析协议private voidserialPort1_DataReceived(object sender, SerialDataReceivedEventArgs e){bel_dispzedNum.Invoke(newMethodInvoker(delegate { //匿名方法 int inNumSData=0;try {inNumSData = this.serialPort1.BytesToRead;b_serial_bufin_diplay.Text =inNumSData.ToString();//串行数据处理 //图像显示byte dataID = 0x00;double temp = this.serialPortCaculate(ref dataID);switch(dataID) {case TEMVAL:break; default:this.serialPort1.DiscardInBuffer()break; }} catch { }}));}///////接收转换协议,接收数据时直接调用private double serialPortCaculate(ref byte dataID){Byte[] BReceiveTemp = new Byte[RECEIVE_LENTH];for (int i = 0; i < RECEIVE_LENTH; i++)//接收定长数据字符串{BReceiveTemp[i] =Convert.ToByte(this.serialPort1.ReadByte());篇二:RS232串口通信协议RS-232串口通信协议RS-232是个人计算机上的通讯接口之一,由电子工业协会(Electronic Industries Association,EIA) 所制定的异步传输标准接口。
上位机工作原理

上位机工作原理一、概述上位机是指与下位机(如PLC、单片机等)进行通信的计算机设备,它通过与下位机建立通信连接,实现对下位机的监控、控制和数据处理等功能。
本文将详细介绍上位机的工作原理及其相关技术。
二、上位机的工作原理1. 通信协议上位机与下位机之间的通信需要依靠一定的协议来进行数据交换。
常见的通信协议有Modbus、Profibus、CAN、Ethernet等。
上位机需要根据所使用的通信协议来进行相应的配置和编程。
2. 数据采集上位机通过与下位机建立通信连接,可以实时采集下位机传感器、执行器等设备的数据。
采集的数据可以包括温度、压力、流量、速度等各种参数。
上位机可以通过编程来设置采集的频率和采集的数据类型。
3. 数据处理上位机采集到的数据需要进行处理和分析,以便进行后续的控制和监测。
数据处理可以包括数据的滤波、数据的计算、数据的转换等操作。
上位机可以通过编程来实现各种数据处理算法。
4. 控制指令下发上位机可以向下位机发送控制指令,以实现对下位机的控制。
控制指令可以包括开关控制、速度控制、位置控制等。
上位机通过编程来生成相应的控制指令,并通过通信协议将指令发送给下位机。
5. 监控与显示上位机可以实时监控下位机的运行状态,并将监控的数据显示在界面上。
监控界面可以包括仪表盘、曲线图、报警信息等。
上位机可以通过编程来实现监控界面的设计和显示。
6. 数据存储与分析上位机可以将采集到的数据进行存储,以便后续的数据分析和处理。
存储的方式可以包括数据库存储、文件存储等。
上位机可以通过编程来实现数据存储和分析的功能。
三、上位机的应用领域上位机广泛应用于工业自动化、智能家居、物联网等领域。
具体应用包括以下几个方面:1. 工业自动化上位机可以与PLC、DCS等控制设备进行通信,实现对生产过程的监控和控制。
例如,在汽车创造过程中,上位机可以实时监测生产线上的各个设备的运行状态,并进行相应的控制。
2. 智能家居上位机可以与智能家居设备(如智能灯光、智能门锁等)进行通信,实现对家居设备的远程控制和监控。
上、下位机通信协议分析
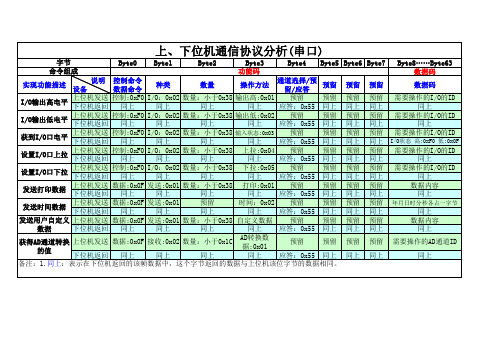
字节 命令组成 实现功能描述 I/O输出高电平 I/O输出低电平 获到I 获到I/O口电平 说明 设备 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 Byte0 控制命令 数据命令 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 数据:0x0F 同上 数据:0x0F 同上 数据:0x0F 同上 Byte1 种类 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 发送:0x01 同上 发送:0x01 同上 发送:0x01 同上 Byte2 数量 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 预留 同上 数量:小于0x38 同上 Byte3 功能码 操作方法 输出高:0x01 同上 输出低:0x02 同上
Byte8上拉:0x04 设置I 设置I/O口上拉 同上 下拉:0x05 设置I 设置I/O口下拉 同上 打印:0x01 发送打印数据 同上 时间:0x02 发送时间数据 同上 自定义数据 发送用户自定义 同上 数据 AD转换数 获得AD AD通道转换 获得AD通道转换 上位机发送 数据:0x0F 接收:0x02 数量:小于0x1C 预留 预留 预留 据:0x01 的值 下位机返回 同上 同上 同上 同上 应答:0x55 同上 同上 备注:1.同上:表示在下位机返回的该帧数据中,这个字节返回的数据与上位机该位字节的数据相同。
SGJ4下位机与PC通讯协议
数据顺序
字节内容
含义
1
CT 数据 Ia(H)
CT 数据顺序和单位分别为:
2
CT 数据 Ia(L)
Ia,tga,Ca,Ib,tgb,Cb,Ic,tgc,Cc
3
CT 数据 tga(H)
Ix = 0.1mA(泄漏电流)
4
CT 数据 tga(L)
tgx = 0.01%(介损)
…
…
Cx = 1p(电容量)
BL 单组数据格式如下(固定 18 字节格式):
九. 下位机要求上位机发送设备绝缘状况判断结果:
格式如下:
发送顺序 字节内容
含义
1
A5H
数据特征
2
校验码 与前面字节相加,和为 0
十. 下位机向上位机发送油气监测所需变压器状态:
格式如下:
发送顺序 字节内容
含义
1
A6H
数据特征
2
判断结果 1 或 2,表示哪台变压器正在运行
3
校验码 与前面所有字节相加,和为 0
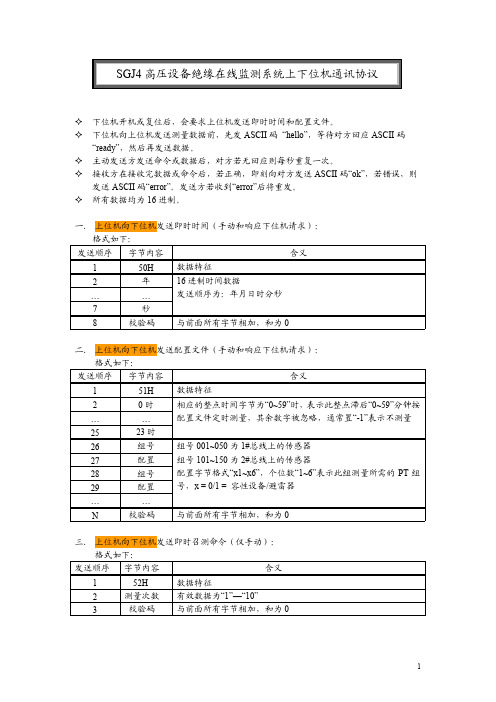
发送 ASCII 码“error”。发送方若收到“error”后将重发。 所有数据均为 16 进制。
一. 上位机向下位机发送即时时间(手动和响应下位机请求):
格式如下:
发送顺序 字节内容
含义
1
50H
数据特征
2
年
16 进制时间数据
…
…
发送顺序为:年月日时分秒
7
秒
8
校验码 与前面所有字节相加,和为 0
3
发送顺序字节内容含义a1ha2h数据特征定时数据召测数据温度双字节有符号数单位01无效数32768湿度双字节无符号数单位1无效数18251首组pt数据1总线上的传感器pt组号为201和202总共1pt20个字节pt数据在前ctbl数据在后2首组pt数据2总线上的传感器pt组号为203和204总共2pt20个字节其余同上校验码与前面所有字节相加和为0上位机向下位机发送设备绝缘状况判断结果仅响应下位机请求
上位机与下位机的数据传输以及协议小议

上位机与下位机的数据传输以及协议小议
上位机与下位机的数据传输以及协议小议
杜时英
【期刊名称】《计算机光盘软件与应用》
【年(卷),期】2012(000)015
【摘要】随着计算机在工业控制中的广泛应用,同时监控的网络化迅速发展,导致很多的数据处理以及网络协同工作下位机无法完成。
所以,上位机扮演的角色越来越重要。
本文从上位机与下位机的数据传输方式以及传输协议做一个简单的阐述,同时对于协议的加密以及扩展进行新的探讨。
【总页数】3页(45-47)
【关键词】上位机;下位机;传输协议
【作者】杜时英
【作者单位】嘉兴职业技术学院,浙江嘉兴 314036
【正文语种】中文
【中图分类】TP274
【相关文献】
1.PLC编程口与上位机数据传输的通讯格式获取研究[J], 岳利维; 关欣
2.基于RS485的上位机与单片机数据传输系统设计 [J], 刘亮
3.电力系统上位机监控软件与LonWorks网络间数据传输的实现[J], 李超; 王建华; 姚建军; 徐宏
4.国标《交通信号控制机与上位机间的数据通信协议》颁布 [J],
5.交通信号控制机与上位机间数据通信协议的研究[C], 汪志涛; 周永顺; 郑军燕; 王志明。
应用于教育机器人的上下位机的通信控制方案

应用于教育机器人的上下位机的通信控制方案上下位机通信是指上位机和下位机之间的数据交换和指令传递。
上位机一般指的是教师或者学生使用的控制终端,用于输入指令、查看机器人状态等操作;下位机指的是机器人本身,负责执行指令、采集环境信息等任务。
上下位机通信的目的是实现控制指令的传递和数据的交换,以实现机器人的智能行为。
在教育机器人中,上下位机通信的方案需要满足以下几个要求:1. 高效稳定:通信方案应具备高效稳定的特性,能够快速传递指令和数据,确保教育机器人的实时性和准确性。
2. 可靠性:通信方案应具备较高的可靠性,能够在不同环境和网络条件下正常工作,并能自动修复和恢复错误。
3. 安全性:教育机器人中可能涉及到学生的个人信息和敏感数据,通信方案应具备较高的安全性,确保数据的保密性和完整性。
4. 扩展性:通信方案应具备较高的扩展性,能够适应教育机器人的不断发展和升级,支持更多的功能和接口。
基于以上要求,我们提出以下通信控制方案:1. 使用TCP/IP协议:TCP/IP协议是一种常用的网络通信协议,具备高效稳定、可靠性和安全性的特点。
通过TCP/IP协议,可以实现上下位机之间的数据传输和指令传递。
2. 采用Socket编程:Socket编程是一种常用的网络编程方式,可以实现上下位机之间的通信。
通过建立Socket连接,上位机可以向下位机发送指令和数据,下位机可以将执行结果返回给上位机。
3. 使用JSON格式进行数据交换:JSON是一种轻量级的数据交换格式,具备较高的可读性和易解析性。
上下位机之间的数据交换可以使用JSON格式进行编码和解码,以实现数据的高效传输和解析。
4. 增加数据校验和重传机制:为了保证数据传输的可靠性,可以在通信协议中增加校验和重传机制。
通过校验和验证数据的完整性,如果数据传输过程中发生错误,可以进行重传,确保数据的准确性。
5. 支持固件升级和远程控制:通信方案还应支持固件升级和远程控制功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
预留 需要操作的I/O的ID 同上 同上 预留 需要操作的I/O的ID 同上 同上 预留 需要操作的I/O的ID 同上 I/O状态 高:0xF0 低:0x0F 预留 需要操作的I/O的ID 同上 同上 预留 需要操作的I/O的ID 同上 同上 预留 数据内容 同上 同上 年月日时分秒各占一字节 预留 同上 同上 预留 数据内容 同上 同上 预留 同上 需要操作的AD通道ID 同上
输入状态:0x03
Byte4 通道选择/预 留/应答 预留 应答:0x55 预留 应答:0x55 预留 应答:0x55 预留 应答:0x55 预留 应答:0x55 预留 应答:0x55 预留 应答:0x55 预留 应答:0x55
Byte5 Byte6 Byte7 预留 预留 同上 预留 同上 预留 同上 预留 同上 预留 同上 预留 同上 预留 同上 预留 同上 预留 预留 同上 预留 同上 预留 同上 预留 同上 预留 同上 预留 同上 预留 同上 预留 同上 预留
上、下位机通信协议分析(串口)
字节 命令组成 实现功能描述 I/O输出高电平 I/O输出低电平 获到I/O口电平 说明 设备 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 上位机发送 下位机返回 Byte0 控制命令 数据命令 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 控制:0xF0 同上 数据:0x0F 同上 数据:0x0F 同上 数据:0x0F 同上 Byte1 种类 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 I/O:0x02 同上 发送:0x01 同上 发送:0x01 同上 发送:0x01 同上 Byte2 数量 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 数量:小于0x38 同上 预留 同上 数量:小于0x38 同上 Byte3 功能码 操作方法 输出高:0x01 同上 输出低:0x码 数据码
同上 上拉:0x04 设置I/O口上拉 同上 下拉:0x05 设置I/O口下拉 同上 打印:0x01 发送打印数据 同上 时间:0x02 发送时间数据 同上 发送用户自定义 自定义数据 数据 同上 AD转换数 获得AD通道转换 上位机发送 数据:0x0F 接收:0x02 数量:小于0x1C 预留 预留 预留 据:0x01 的值 下位机返回 同上 同上 同上 同上 应答:0x55 同上 同上 备注:1.同上:表示在下位机返回的该帧数据中,这个字节返回的数据与上位机该位字节的数据相同。