MATLAB的阻抗圆图的设计
阻抗匹配中圆图的巧妙使用

阻抗匹配与史密斯(Smith)圆图: 基本原理本文利用史密斯圆图作为RF阻抗匹配的设计指南。
文中给出了反射系数、阻抗和导纳的作图范例,并用作图法设计了一个频率为60MHz的匹配网络。
实践证明:史密斯圆图仍然是计算传输线阻抗的基本工具。
在处理RF系统的实际应用问题时,总会遇到一些非常困难的工作,对各部分级联电路的不同阻抗进行匹配就是其中之一。
一般情况下,需要进行匹配的电路包括天线与低噪声放大器(LNA)之间的匹配、功率放大器输出(RFOUT)与天线之间的匹配、LNA/VCO输出与混频器输入之间的匹配。
匹配的目的是为了保证信号或能量有效地从“信号源”传送到“负载”。
在高频端,寄生元件(比如连线上的电感、板层之间的电容和导体的电阻)对匹配网络具有明显的、不可预知的影响。
频率在数十兆赫兹以上时,理论计算和仿真已经远远不能满足要求,为了得到适当的最终结果,还必须考虑在实验室中进行的RF测试、并进行适当调谐。
需要用计算值确定电路的结构类型和相应的目标元件值。
有很多种阻抗匹配的方法,包括:计算机仿真:由于这类软件是为不同功能设计的而不只是用于阻抗匹配,所以使用起来比较复杂。
设计者必须熟悉用正确的格式输入众多的数据。
设计人员还需要具有从大量的输出结果中找到有用数据的技能。
另外,除非计算机是专门为这个用途制造的,否则电路仿真软件不可能预装在计算机上。
的计算公式、并且被处理的数手工计算:这是一种极其繁琐的方法,因为需要用到较长(“几公里”)据多为复数。
经验:只有在RF领域工作过多年的人才能使用这种方法。
总之,它只适合于资深的专家。
史密斯圆图: 本文要重点讨论的内容。
本文的主要目的是复习史密斯圆图的结构和背景知识,并且总结它在实际中的应用方法。
讨论的主题包括参数的实际范例,比如找出匹配网络元件的数值。
当然,史密斯圆图不仅能够为我们找出最大功率传输的匹配网络,还能帮助设计者优化噪声系数,确定品质因数的影响以及进行稳定性分析。
微波期中matlab仿真smith圆图

微波工程期中课程设计班级:2010姓名:学号:序号:02日期:2013年5月EMAIL :目录一:软件界面 (3)二:功能介绍 (3)1.输入模块 (3)2.归一化阻抗和导纳求解 (3)3.反射系数和驻波比求解 (3)4.单支节双支节匹配 (4)5.演示部分 (4)6.清除 (7)三:操作步骤 (7)四:软件原理 (7)A.公式 (7)B.代码原理 (9)1:输入部分 (9)2:计算归一化阻抗和反射系数 (10)3:单支节匹配 (12)4:双支节匹配 (16)五:总结 (17)六:致谢 (18)一:软件界面二:功能介绍1.输入模块此处输入负载的实部和虚部以及特征阻抗。
2.归一化阻抗和导纳求解按下计算按钮后此处显示归一化阻抗和导纳3.反射系数和驻波比求解、此处显示反射系数和驻波比的计算结果4.单支节双支节匹配此处显示单支节和双支节匹配的计算结果(双支节需要输入d1和d2)5.演示部分归一化演示单支节匹配演示双支节演示6.清除此键将左侧图重置,并清除所有数据。
三:操作步骤1)在ZL处输入负载的实部和虚部,没有虚部写成0,不能空着。
2)点击计算按钮,得到归一化阻抗导纳及驻波比和反射系数3)点击单支节匹配得到单支节匹配结果4)输入distance1和distance2点击双支节匹配可得到双支节结果四:软件原理A.公式1:求反射系数的公式。
在ConvertZ2AbsL等函数中用到2:求反射系数的模,在[AbsL,Ph]函数中用到。
反射系数与驻波比的关系。
3:求输入阻抗,在双支节匹配中,由y1旋转到y1‘用到,用于求第一个直接匹配后的导纳。
4:用于计算按钮中,求驻波比和K。
5:单支节匹配中用于解析法求distance 和length 的函数中用到。
输入阻抗虚部不为0时用到。
min 0min 1arccos 4π1⎛⎫-=+=+ ⎪+⎝⎭d l d l λρρ6:主要用于绘制圆的函数,非常重要。
B. 代码原理 1:输入部分输入部分类似都是用str2double函数读取edit类型框中的输入数值并进行检错,如果不是数字则报错。
阻抗园图

2
(Γr − 1 )2
1 1 + Γi − = x x
2
2
等电阻圆
1-5 阻抗圆图及其应用
1-5 阻抗圆图及其应用 将等电阻圆 和等电抗圆 绘制在同一 张图上,即 得到阻抗圆 图
等电抗圆
1-5 阻抗圆图及其应用 三、阻抗圆图特点 (1) 圆图上有三个特殊点 : 短路点( C点) ,其坐标为(-1,0) 。此处对应于:
Smith圆图即可作为阻抗圆图也可作为导 纳圆图使用。作为阻抗圆图使用时,圆图中 的等值圆表示r和x圆;作为导纳圆图使用 时,圆图中的等值圆表示g和b圆。并且圆图 实轴的上部x或b均为正值,实轴的下部x或b 均为负值。 — — 常用方法
这里: Yin ( z ) =
1 1 1 Y (z ) ; Yc = ; Yl = ; y = in = Yin ( z ) × Z c Zin ( z ) Zc Zl Yc
Z in ( z ) max = R max = sZ c
¡ 电压波节处输入阻抗为最小值(纯电阻) , 其值为
Z in ( z ) min = R min = Zc / s = KZ c
1-5 阻抗圆图及其应用 一、阻抗圆图 反映输入阻抗 Zin(z)与反射系数 Γ(z) 的关系 。阻抗 圆图由等反射系数圆、等电阻圆和等电抗圆组成 1. 等反射系数圆 由:
∆φ = 2β ∆z = 4π ∆z λ = 4π ∆(波长数)
1-5 阻抗圆图及其应用 (5) 圆图上任意一点对应了四个参量 :r、x、|Γ|和 φ。知道了前两个参量或后两个参量均可确定该 点在圆图上的位置。注意r 和x均为归一化值,如果 要求它们的实际值分别乘上传输线的特性阻抗。 如果终端负载归一化阻抗落在上半圆内,可立 即判定传输线将先出现电压腹点;反之,如果落 在下半圆内,则传输线将先出现电压节点。
Smith圆图的Matlab实现及应用

分类号密级U D C 编号本科毕业论文(设计)题目Smith圆图的matlab实现及应用院(系)专业年级学生姓名学号指导教师二○○七年五月目录摘要 (1)关键字 (1)Abstract (1)Keywords (1)第1章前言 (2)第2章传输线阻抗匹配问题 (2)2.1阻抗匹配的重要性 (2)2.2 阻抗匹配的实现 (3)第3章 SMITH圆图的构成原理 (6)3.1反射系数圆 (6)3.2 阻抗圆图 (8)3.3 完成圆图 (11)3.4 导纳圆图 (12)第4章 SMITH圆图Matlab的实现 (13)4.1 圆图的绘制 (13)4.2 SMITH圆图软件设计的特点 (16)第5章 SMITH圆图的应用举例 (18)5.1 SMITH圆图的应用步骤 (18)5.2 根据负载阻抗求驻波比 (21)第6章总结 (22)参考文献 (23)致谢................................................... 错误!未定义书签。
摘要:基于smith圆图在进行阻抗匹配时具有方便、直观等特点,本文首先介绍了阻抗匹配的基础知识,在此基础上详细地阐述了smith圆图的构成原理,其中包括反射系数圆、阻抗圆图和导纳圆图,给出了各种圆图的具体推导过程。
接着提出了用matlab实现smith圆图的方法。
最后通过实例介绍了smith圆图的应用,归纳出了用matlab实现smith圆图具有省时、高效的特点,有推广的价值。
关键字:smith圆图matlab阻抗匹配Abstract:Based on the smith chart having the characteristic of convenient and intuitionistic in solving the problem of impedance matching, the elementary knowledge of impedance matching is introduced in the beginning of the paper, on this condition ,the paper describes constitution principle of the smith chart in detail and it includes the reflectance circle and the impedance circle diagram and the conductance circle diagram,and the concrete reasoning process of each kind of circle diagram is presented.Then the paper proposes realizable method of the smith chart with matlab. Finally,the paper introduces application of the smith chart,it is concluded that realization of the smith chart with matlab has the characteristic of highly effective and time-saving, has promoted value.Keywords:smith chart matlab impedance matching第1章前言工程中常采用smith圆图来分析传输线问题,传输线能引导电磁波沿一定的方向传输,为了提高传输线传输能量的效率,将输入的能量尽最大可能传给终端负载,需要保证传输线的终端的负载与其特性阻抗匹配,即传输线此时处于阻抗匹配状态。
第1章_阻抗圆图

1 (1/2,0) 1/2
2 (2/3,0) 1/3
∞ (1,0) 0
阻抗圆图 2、等X 线 、 的幂序排列, 将式(1.93b)按Γ’’的幂序排列,有 ) 的幂序排列
阻抗圆图的构成
2Γ '' (Γ − 1) + Γ − =0 X
' 2 '' 2
Γ’’
x=1 x=1/2 x=2
1 ( ) 2 配方,得 两边各加 X 配方,
阻抗圆图
阻抗圆图的构成
概括地说,在反射系数Γ单位复平面上将阻抗(导纳)及驻波比 行波系数 表示出来, 行波系数)表示出来 概括地说,在反射系数Γ单位复平面上将阻抗(导纳)及驻波比(行波系数 表示出来,由 等电阻圆(等电导圆 等电导圆) 等电抗圆(等电纳圆 等电纳圆) 等电阻圆 等电导圆 ,等电抗圆 等电纳圆 ,等驻波比圆在单位圆内形成的一系列圆簇即 构成阻抗圆图(史密斯圆图 史密斯圆图)。 构成阻抗圆图 史密斯圆图 。 传输线上任一参考面的输入阻抗与该处的反射系数有一一对应的关系, 传输线上任一参考面的输入阻抗与该处的反射系数有一一对应的关系,即
Γ=Γ e jθ = Γ ' + jΓ ''
所以有
(1.92)
Z in 1 + (Γ ' + jΓ '' ) = R + jX = Zc 1 − ( Γ ' + jΓ ' ' )
令第二个等号两边实部、虚部分别相等, 令第二个等号两边实部、虚部分别相等,得
1 − Γ '2 − Γ ''2 R= (1 − Γ ' ) 2 + Γ ''2
北邮 基于MatLab的Smith圆图演示软件

2013基于MatLab的Smith圆图演示程序设计微波技术课程设计目录一.原理介绍 (2)1.Smith圆图组成 (2)2.阻抗匹配 (3)2.1单支节阻抗匹配 (3)2.2双支节阻抗匹配 (4)二.软件功能 (4)三.程序界面 (5)四.使用演示 (5)1.求解归一化阻抗,归一化导纳,反射系数及驻波比 (5)2.画等反射系数图等电阻图等电抗图 (6)3.求解及演示支节匹配 (7)3.1 单支路并联短路 (7)3.2 单支路并联开路 (8)3.3 单支路串联短路 (10)3.4 单支路串联开路 (11)3.5 双支路并联短路 (12)3.6 双支路并联开路 (13)3.7 双支路串联短路 (14)3.8 双支路串联开路 (15) (16)4. 保存图像 (17)5.差错检测 (18)五.总结体会 (18)一.原理介绍微波工程中,smith圆图是一种最有效最常见的图形工具。
圆图全面反映了反射系数与阻抗/导纳之间的相互管,能够极大的简化传输线及集总参数电路中复杂问题的分析与设计。
1.Smith圆图组成Smith圆图(阻抗圆图)以反射系数Γ图为基底,所描述的r和x在Γ复平面上的轨迹。
Γ=Z L−Z0Z L+Z0=|Γ|e jθT(1.1)实部:Γr=r2−1+x2(r+1)2+x2(1.2)虚部:Γi=2x(r+1)2+x2(1.3)根据式(1.2)和式(1.3)可得到两组圆,当他们叠在一起便构成一张完整的smith圆图。
等电阻圆:(Γr−r1+r )2+Γi2=(11+r)2,|Γ|≤1圆心:(r1+r ,0),半径:11+r等电抗圆:(Γr−1)2+(Γi−1x )2=(1x)2,|Γ|≤1圆心:(1,1x ),半径:1x图1 等电阻等电抗及合成圆图类似地,还可以根据导纳画出导纳的Smith圆图。
2.阻抗匹配为了使微波传输系统能够将微波源的功率有效地传给负载,就必须使其阻抗匹配。
实际运用中常采用的是支节匹配器的方法。
matlab建立阻抗函数模型
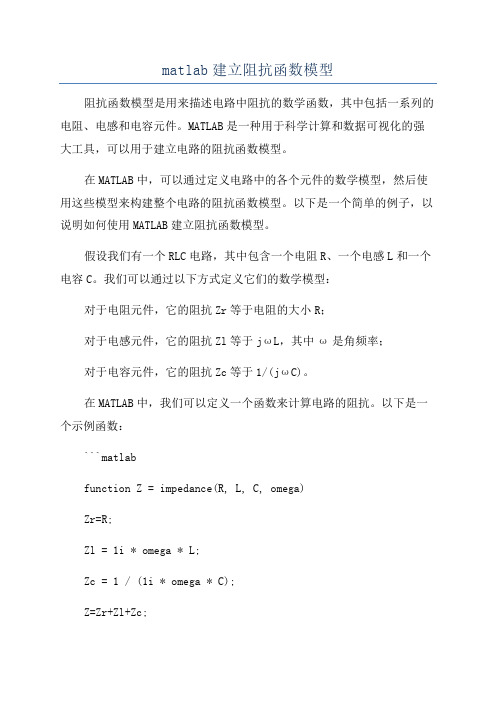
matlab建立阻抗函数模型阻抗函数模型是用来描述电路中阻抗的数学函数,其中包括一系列的电阻、电感和电容元件。
MATLAB是一种用于科学计算和数据可视化的强大工具,可以用于建立电路的阻抗函数模型。
在MATLAB中,可以通过定义电路中的各个元件的数学模型,然后使用这些模型来构建整个电路的阻抗函数模型。
以下是一个简单的例子,以说明如何使用MATLAB建立阻抗函数模型。
假设我们有一个RLC电路,其中包含一个电阻R、一个电感L和一个电容C。
我们可以通过以下方式定义它们的数学模型:对于电阻元件,它的阻抗Zr等于电阻的大小R;对于电感元件,它的阻抗Zl等于jωL,其中ω是角频率;对于电容元件,它的阻抗Zc等于1/(jωC)。
在MATLAB中,我们可以定义一个函数来计算电路的阻抗。
以下是一个示例函数:```matlabfunction Z = impedance(R, L, C, omega)Zr=R;Zl = 1i * omega * L;Zc = 1 / (1i * omega * C);Z=Zr+Zl+Zc;end```在这个函数中,输入参数R、L、C分别代表电阻R、电感L和电容C 的大小,omega代表角频率。
函数内部分别计算了电阻元件、电感元件和电容元件的阻抗,然后将它们相加得到整个电路的阻抗。
使用这个函数,我们可以计算不同参数下电路的阻抗。
以下是一个简单的例子:```matlabR=10;L=0.1;C=0.01;omega = [0:0.01:10];Z = impedance(R, L, C, omega);figure;plot(omega, abs(Z));xlabel('Angular Frequency');ylabel('Impedance');title('Impedance vs. Angular Frequency');```在这个例子中,我们假设电阻的大小是10欧姆,电感的大小是0.1亨,电容的大小是0.01法拉。
阻抗圆图总结
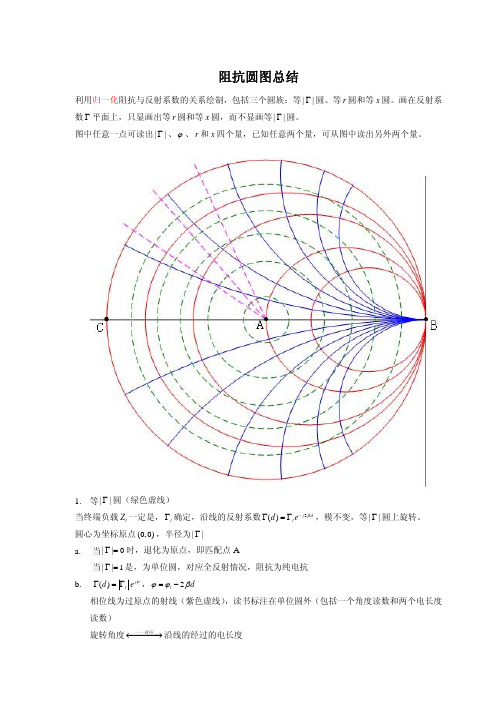
阻抗圆图总结利用归一化阻抗与反射系数的关系绘制,包括三个圆族:等||Γ圆、等r 圆和等x 圆。
画在反射系数Γ平面上,只显画出等r 圆和等x 圆,而不显画等||Γ圆。
图中任意一点可读出||Γ、ϕ、r 和x 四个量,已知任意两个量,可从图中读出另外两个量。
1. 等||Γ圆(绿色虚线)当终端负载l Z 一定是,l Γ确定,沿线的反射系数2()j d l d e β−Γ=Γ,模不变,等||Γ圆上旋转。
圆心为坐标原点(0,0),半径为||Γa. 当||0Γ=时,退化为原点,即匹配点A当||1Γ=是,为单位圆,对应全反射情况,阻抗为纯电抗b. ()j l d e ϕΓ=Γ,2l d ϕϕβ=−相位线为过原点的射线(紫色虚线),读书标注在单位圆外(包括一个角度读数和两个电长度读数)旋转角度←⎯⎯⎯→一一对应沿线的经过的电长度2. 等r 圆(红色实线)2221()(11r r r ′′′Γ+Γ=++-,圆心(,0)1r r +,半径11r + 圆心在实轴上,并且与B (1,0)相切a. 当0r =时,圆心(0,0),半径1,最外层的单位圆,也称纯电抗圆b. r 增大,圆心沿实轴向右远离原点当r 增大到r =∞时,圆心移至B 点,半径变为0,对应开路点3. 等x 圆(蓝色实线)22211()()()x x ′′′Γ+Γ=-1-,圆心1(1,)x ,半径1x 由于有效部分限于1Γ≤单位圆内,圆外部分不画出 a. 当0x =时,圆心(0,)±∞,半径∞,退化为实轴,即纯电阻线 b. 当x =±∞时,圆心(1,0),半径为0,退化为B 点,即开路点4. 实轴左端点C 代表短路点,是圆0r =且0x =两个圆的交点,该点1Γ=−,实轴右端点B 代表开路点,是圆r =∞且x =±∞两个圆的交点,该点1Γ= 中心点A 代表匹配点,该点1r =,0x =,0Γ=5. 既然实轴为纯电阻,则轴上各点有0x =,这些点对应于线上电压电流同相位,故它们对应电压波腹/波节点。
阻抗圆图综述

阻抗圆图综述史密斯圆图是用来分析传输线匹配问题的有效方法。
它具有概念明晰、求解直观、精度较高等特点,被广泛应用于射频工程中。
史密斯圆图是由很多圆周交织在一起的一个图。
如图1a所示。
正确的使用它,可以在不作任何计算的前提下得到一个表面上看非常复杂的系统的匹配阻抗,唯一需要作的就是沿着圆周线读取并跟踪数据。
1.阻抗圆图图1a归一化电阻圆图图1b 归一化电抗圆图图1a. 圆周上的点表示具有相同实部的阻抗。
例如,r = 1的圆,以(0.5, 0)为圆心,半径为0.5。
它包含了代表反射零点的原点(0, 0) (负载与特性阻抗相匹配)。
以(0, 0)为圆心、半径为1的圆代表负载短路。
负载开路时,圆退化为一个点(以1, 0为圆心,半径为零)。
与此对应的是最大的反射系数1,即所有的入射波都被反射回来。
图4b. 圆周上的点表示具有相同虚部x的阻抗。
例如,× = 1的圆以(1, 1)为圆心,半径为1。
所有的圆(x为常数)都包括点(1, 0)。
与实部圆周不同的是,x既可以是正数也可以是负数。
这说明复平面下半部是其上半部的镜像。
所有圆的圆心都在一条经过横轴上1点的垂直线上。
从阻抗原图上我们可知:(1).在阻抗圆的上半圆内的电抗x>0呈感性,下半圆的电抗x<0呈容性。
(2).实轴上的点代表纯电阻点,左半轴上的点为电压波节点,其上的刻度即代表rmin 又代表行波系数K,右半轴的点为波腹点,其上的刻度即代表rmax又代表驻波比p。
(3).圆图旋转一周为y/2。
(4).|Γ|=1的圆周上的点代表纯电抗点。
(5).实轴左端点为短路点,右端点为开路点,中心处有z=1+j0,是匹配点。
(6).在传输线上由负载向电源方向移动时,在圆周上应该顺时针旋转;反之,由电源向负载方向移动时,应逆时针旋转。
2.导纳圆图:在前面的讨论中,我们看到阻抗圆图上的每一个点都可以通过以Γ复平面原点为中心旋转180°后得到与之对应的导纳点。
11.6阻抗圆图
rin rL xin
xL
r
l /
12
13
2.5 传输线圆图应用举例(续3)
例4、已知l /和zL ,求yin 。
ji ji
yin
zL
r
l/
yin yL
zL
r
l/
zin
14
解法1
解法2
2.5 传输线圆图应用举例(续4)
例5、已知ρ和dmin/,求zL 和yL 。
ji
电压波节点
信息电子技术中 的场与波
阻抗圆图的应用
(1) 匹配点,即阻抗圆图的中心点。 电压节点 电压腹点 (2) 纯电抗圆、短路点和开路点。
(3) 纯电阻线。 (4) 感性和容性半圆。 (5) r=1圆。 (6) x=1圆弧;x=-1圆弧
电流腹点 r=1/ρ
电流节点 r=ρ
2
电长度读数
导纳圆图
34
~ Z L 0.4 j0.2
电长度为: 0.288
~ 2°做等反射系数圆,交 G 1 的单位圆与两点 A,A’
1 j0.97 Y A1 电长度为: 0.339
' 1 j0.97 Y A1 电长度为: 0.162
28
A’
C P
0.162
0.25
P’
A
0.288 0.339
0.25
A’ 0.308
25
支节位置
d 0.192 0.162 0.03 d 0.308 0.162 0.146
3°求短路支节的输入阻抗
j2.2 Z A2 0.318 电长度为:
l 0.318,
' j2.2 Z A2
matlab建立阻抗函数模型

Matlab建立阻抗函数模型引言阻抗函数模型是一种用来描述电路或系统中电压和电流之间关系的数学模型。
在电力系统、电路设计和信号处理等领域中,阻抗函数模型被广泛应用。
Matlab作为一种强大的数学软件,提供了丰富的工具和函数,可以方便地建立和分析阻抗函数模型。
本文将介绍如何使用Matlab建立阻抗函数模型,并提供一些实例进行演示。
阻抗函数模型的基本概念阻抗函数模型描述了电路或系统中电压和电流之间的关系。
在频域中,阻抗函数模型可以用复数形式表示,即阻抗函数为复数函数。
通常情况下,阻抗函数模型可以表示为:Z(s)=R(s)+jX(s)其中,Z(s)为复数阻抗函数,R(s)为实部(电阻),X(s)为虚部(电抗)。
Matlab中的阻抗函数建模工具Matlab提供了多种函数和工具,用于建立和分析阻抗函数模型。
下面介绍几种常用的工具:tf函数tf函数用于建立传递函数模型,可以用来表示阻抗函数模型。
tf函数的基本语法为:H = tf(num, den)其中,num为传递函数的分子多项式系数,den为传递函数的分母多项式系数。
通过tf函数,可以方便地建立阻抗函数模型。
zpk函数zpk函数用于建立零极点模型,也可以用来表示阻抗函数模型。
zpk函数的基本语法为:H = zpk(z, p, k)其中,z为传递函数的零点,p为传递函数的极点,k为传递函数的增益。
通过zpk 函数,可以更加直观地建立阻抗函数模型。
ss函数ss函数用于建立状态空间模型,同样可以用来表示阻抗函数模型。
ss函数的基本语法为:sys = ss(A, B, C, D)其中,A、B、C、D分别为状态空间模型的矩阵。
通过ss函数,可以更加灵活地建立阻抗函数模型。
阻抗函数模型的应用实例下面通过一些实例,演示如何使用Matlab建立阻抗函数模型。
实例1:RL电路的阻抗函数模型考虑一个简单的RL电路,其中电阻R为10欧姆,电感L为1亨。
我们可以使用tf函数建立RL电路的阻抗函数模型。
阻抗圆图和导纳圆图

分析三个方面:幅度、相位、方向。
§1.5 阻抗圆图和导纳圆图
1. 反射系数圆
(1)|Γ(0)|=const.对应复 平面上一族以原点为圆心的同 心圆。所有圆均在|Γ(0)|=1的 圆内。 ●|Γ(0)|=1的圆是最大圆,它 相当于全反射的情况。 ●|Γ(0)|=0的圆缩为一点,即 原点,称为阻抗匹配点 圆越大,即离原点越远, 系统匹配越差。
(2) r=1的圆通过原点,称为匹配圆。这个圆很 重
要,在以后设计匹配电路时要经常用到。 (3) r=∞的圆缩为一点(1,0).叫做开路点。
§1.5 阻抗圆图和导纳圆图
2. 电阻圆与电抗圆 虚部:
x
2 2 1 r i
2 2
2 i
j i
(1-122)
x=0.5
x=1
x=2
§1.5 阻抗圆图和导纳圆图
1. 反射系数圆
(4)沿线移动λ/2时,对应在复平面上沿
| (0 )| const . 的圆旋转一圈。
因为相位因子:
e
j(2 z ) 0
z=λ/2时,相位改变量为2β z=2π
§1.5 阻抗圆图和导纳圆图
1.5.1 阻抗圆图
1 (z ) 1 (z )
2. 电阻圆与电抗圆
(z ) Z 传输线上任一点的输入阻抗为: Z in c
简写为: 用特性阻抗Zc归一化:
Z Z c
1 R jX 1
(1-118)
Z 1 R X z j r jx (1-119) Z Z Z c 1 c c
j r i
若反射系数也写成复数形式:
则:
2 2 1 j ( 1 j 2 r i r i) i r jx 2 2 1 j ( 1 ) r i r i
基于Matlab的RF系统阻抗匹配设计
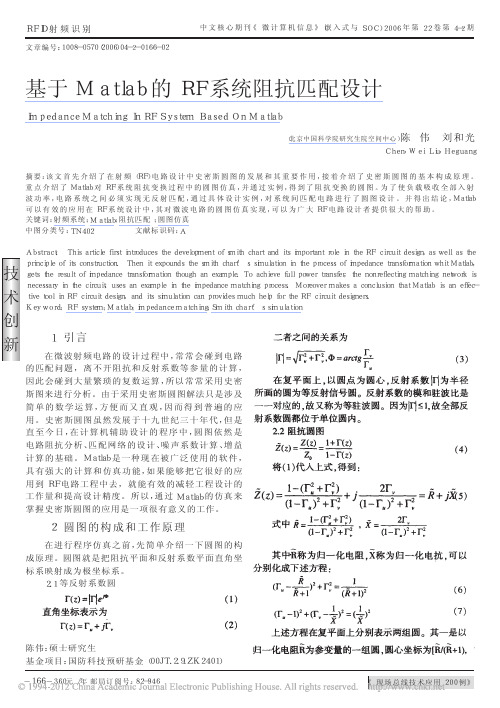
技术创新中文核心期刊《微计算机信息》(嵌入式与SOC)2006年第22卷第4-2期RFID射频识别基于Matlab的RF系统阻抗匹配设计ImpedanceMatchingInRFSystemBasedOnMatlab(北京中国科学院研究生院空间中心)陈伟刘和光Chen,WeiLiu,Heguang摘要:该文首先介绍了在射频(RF)电路设计中史密斯圆图的发展和其重要作用,接着介绍了史密斯圆图的基本构成原理。
重点介绍了Matlab对RF系统阻抗变换过程中的圆图仿真,并通过实例,得到了阻抗变换的圆图。
为了使负载吸收全部入射波功率,电路系统之间必须实现无反射匹配,通过具体设计实例,对系统间匹配电路进行了圆图设计。
并得出结论,Matlab可以有效的应用在RF系统设计中,其对微波电路的圆图仿真实现,可以为广大RF电路设计者提供很大的帮助。
关键词:射频系统;Matlab;阻抗匹配;圆图仿真中图分类号:TN402文献标识码:AAbstract:ThisarticlefirstintroducesthedevelopmentofsmithchartanditsimportantroleintheRFcircuitdesign,aswellastheprincipleofitsconstruction.Thenitexpoundsthesmithchart'ssimulationintheprocessofimpedancetransformationwhitMatlab,getstheresultofimpedancetransformationthoughanexample.Toachievefullpowertransfer,thenonreflectingmatchingnetworkisnecessaryinthecircuit,usesanexampleintheimpedancematchingprocess.MoreovermakesaconclusionthatMatlabisaneffec-tivetoolinRFcircuitdesign,anditssimulationcanprovidesmuchhelpfortheRFcircuitdesigners.Keyword:RFsystem;Matlab;impedancematching;Smithchart'ssimulation文章编号:1008-0570(2006)04-2-0166-021引言在微波射频电路的设计过程中,常常会碰到电路的匹配问题,离不开阻抗和反射系数等参量的计算,因此会碰到大量繁琐的复数运算,所以常常采用史密斯图来进行分析。
matlab建立阻抗函数模型
matlab建立阻抗函数模型摘要:一、引言1.1 MATLAB的概述1.2 MATLAB在电力系统领域的应用1.3 阻抗函数模型在电力系统稳定分析中的重要性二、MATLAB建立阻抗函数模型2.1 阻抗函数模型的基本概念2.2 MATLAB中阻抗函数模型的建立方法2.3 MATLAB中阻抗函数模型的参数设置三、MATLAB仿真和分析阻抗函数模型3.1 MATLAB中阻抗函数模型的仿真方法3.2 MATLAB中阻抗函数模型的分析方法3.3 MATLAB中阻抗函数模型的优化方法四、MATLAB在阻抗函数模型应用中的案例分析4.1 案例一:MATLAB在电力系统稳定分析中的应用4.2 案例二:MATLAB在电力市场仿真中的应用4.3 案例三:MATLAB在电力负荷预测中的应用五、总结与展望5.1 总结5.2 展望正文:一、引言MATLAB是一种功能强大的编程语言,广泛应用于科学计算和工程设计领域。
在电力系统领域,MATLAB被应用于电力系统稳定分析、电力市场仿真、电力负荷预测等方面。
阻抗函数模型是电力系统稳定分析的基础,可以通过对电力系统的电气参数进行建模,模拟电力系统的动态行为。
MATLAB提供了丰富的工具箱和函数,可以方便地建立阻抗函数模型,并进行仿真和分析。
二、MATLAB建立阻抗函数模型阻抗函数模型是描述电力系统中各种电气设备阻抗特性的数学模型。
在MATLAB中,可以通过以下步骤建立阻抗函数模型:1.导入相关工具箱和函数:使用`import`命令导入所需的工具箱和函数,例如`import电力系统工具箱`。
2.定义阻抗函数模型:在MATLAB中定义阻抗函数模型,通常使用`Z`函数或者`impedance`函数。
例如,定义一个简单的RLC阻抗函数模型:```matlabZ = impedance(R, X, Y);```其中,`R`、`X`、`Y`分别表示电阻、电感和电容的阻抗。
3.参数设置:根据实际问题需要,对阻抗函数模型进行参数设置,例如设置电阻、电感和电容的数值。
用Matlab实现智能圆图
Z (r , x ) 平面上的任一点必定可在Γ (u, v ) 平面中找
到其对应点(称为映像) 。由于 0 ≤ r < ∞ ,
− ∞ < x < ∞ ,在 Z (r , x ) 平面的有限区域内很难找 到任意给定的 Z in 值,但在Γ (u, v ) 平面上,由于 Γ ≤ 1 ,所以Γ 的值必定在半径为 1 的单位圆内 或单位圆上。 根据 Z in 和Γ in 一一对应的关系可推导
出等电阻圆和等电抗圆的曲线方程。
u= v=
− 1) + x 2 (r + 1)2 + x 2
2
(r
(4)
1 史密斯圆图的构成原理
在微波工程中,经常遇到阻抗和反射系数的计 算,用推导出的公式进行计算往往有繁杂的复数运 算,为了简化运算过程,在一定精度范围内,一般 采用图解法,即史密斯圆图法进行计算。它是利用 阻抗平面和反射系数平面一一对应关系而画出的 一簇圆所构成。在传输线理论中: Z 1 +Γ in (1) Z in = in = = r + jk Z c 1 −Γ in
Γ in = Z Z in in −1 +1
jϕ
2x (r + 1)2 + x 2 联立以上两式消去 x 得
r 1 2 u − +v = 1+ r 1+ r
2 2 2
(5)
(6)
1 1 消去 r 得 (u − 1)2 + v − = x x
0.2 0.4 0.6 0.8 1 [1] 陈振国.微波技术基础[M]. 北京:北京邮电大学出版社,1996. [2] Duane Hanselman. 李人厚译.精通 Matlab[M]. 西安:西安交通大学 出版社, 1999. [3] 周建华.Matlat 5.3 学习教程[M]. 北京:北京大学出版社, 2000. 图 5 输入阻抗点的确定 Fig.5 determination of input impedance point
1.5 阻抗圆图和导纳圆图

§1.5 阻抗圆图和导纳圆图
1. 反射系数圆
jΓi
将Γ(0)在复平面上表示: 横坐标为Γr(0); 纵坐标为Γi(0)。 另外,也可把Γ(0)写为指数形式(0) φΓ0 0
A
Γr(0)
Γr
(1-60)
用复数平面上的矢 量来描述反射系数
即,Γ(0)也可以用极坐标中的矢量来描述,即模 |Γ(0)|和相角φΓ0来确定Γ(0)。
(1-126)
导纳圆图
§1.5 阻抗圆图和导纳圆图
阻抗圆图
电阻r 电抗x 右半横轴: 电压波腹点、s
等电抗圆
等电阻圆
导纳圆图
电导g 电纳b 右半横轴: 电压波节点、K
等电导圆
左半横轴: 左半横轴: 电压波节点、K 电压波腹点、s 右端点:开路点 左端点:短路点 右端点:短路点 左端点:开路点
等电纳圆
若反射系数也写成复数形式:
则:
1 r ji (1 r2 i2 ) j 2i r jx 1 r ji (1 r ) 2 i2
(1-120)
§1.5 阻抗圆图和导纳圆图
2. 电阻圆与电抗圆
实部:
r
圆心坐标为
r , j0 1 r
§1.5 阻抗圆图和导纳圆图
1.5.1 阻抗圆图
(4) 实轴上有三个特殊点: ● 左端点:r=0, x=0, 阻抗短路点,|Γ|=1, 即Γ=-1
●
右端点:r=∞, x=0, 阻抗开路点,|Γ|=1,即Γ=1
●
中心点:r=1, x=0, 阻抗匹配点,Γ=0。
(5) 圆图最外圈上标有电刻度z/λ,这个圆圈的外面有个顺时 针方向箭头,标的是“信号源”,指从终端算起移动的距离,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%
%Usage: plotsmithchart(Zl,Zo)
% where Zl is the Load Impedence (possibly complex)
% and Zo is the Characteristic Line Impedence
else
max_bound = (-1+2^2+R^2)/(2^2+R^2+2*R+1);
end
end
elseif(R<10)
if(mod(R,2)==0)
max_bound = (-1+20^2+R^2)/(20^2+R^2+2*R+1);
if(~(R>.2 & R<.5 & ~(mod(R,.02)==0)))
if(R==1)
color = 'r';
else
color ='b';
end
plot(Gr(MIN:index),r_L_a(1:index-MIN+1),color,Gr(MIN:index), r_L_b(1:index-MIN+1),color);
%solve('R=(1-Gr^2-Gi^2)/((1-Gr)^2+Gi^2)','Gi')
%bound was derived as follows
%solve('1/(R+1)*(-(R+1)*(R-2*R*Gr+R.*Gr^2-1+Gr^2))^(1/2)=0','Gr')
for R = interval2,
MAX2 = ceil((max_bound2+1)*(MAX-1)/2+1);
actual_value = Gr(MAX2);
if(actual_value<max_bound2 )
MAX2 = MAX2 + 1;
end
r_L_a=1/(R+1)*(-(R+1)*(R-2*R.*Gr(MIN:index)+R.*Gr(MIN:index).^2-1+Gr(MIN:index).^2)).^(1/2);
if(R<=1)
if(mod(R,1)==0)
word = [num2str(R) '.0'];
else
% Draws a smithchart, calculates and plots the reflection coefficient
% for a characteristic impedence of 50 ohms and a load impedence of 25 ohms,
% and draws the line of intersection with the R=1 circle.
hold on;
plot(real(unitGamma),imag(unitGamma),'r');
%set(gcf,'Position',[0 0 1280 990]);
axis square
zoom on
axis([-1.1 1.1 -1.1 1.1]);
MAX=2001;
bound2=0;
min_bound1 = (R-1)/(R+1);
if(R<.2)
if(mod(R,.1)==0)
max_bound = (-1+2^2+R^2)/(2^2+R^2+2*R+1);
elseif(mod(R,.02)==0)
end
MIN=index;
index = ceil((max_bound+1)*(MAX-1)/2+1);
actual_value = Gr(index);
if(actual_value>max_bound)
index = index - 1;
end
end
index = ceil((min_bound1+1)*(MAX-1)/2+1);
actual_value = Gr(index);
if(actual_value<min_bound1)
index = index + 1;
bound3=0;
min_bound1=0;
min_bound2=0;
max_bound2=0;
H=0;
word=0;
Gr = linspace(-1,1.01:.01:.2],[.22:.02:.5],[.55:.05:1],[1.1:.1:2],[2.2:.2:5],[6:10],[12:2:20],[30:10:50]];
% Plots a smith chart, along with the reflection coefficient circle
% and the line of intersection with resistive component equal to 1.
% plotsmithchart
% Without any parameters draws a blank smith chart.
% Wavelengths toward the generator are labeled around the perimeter
%
%For example: plotsmithchart(25,50)
elseif(R==50)
max_bound = 1;
elseif(R<20)
max_bound = (-1+20^2+R^2)/(20^2+R^2+2*R+1);
else
max_bound = (-1+50^2+R^2)/(50^2+R^2+2*R+1);
min_bound2 = (-1+.5^2+R^2)/(.5^2+R^2+2*R+1);
max_bound2 = (-1+1^2+R^2)/(1^2+R^2+2*R+1);
end
end
elseif(R<1)
if(mod(R,.2)==0)
max_bound = (-1+5^2+R^2)/(5^2+R^2+2*R+1);
elseif(mod(R,.1)==0)
max_bound = (-1+2^2+R^2)/(2^2+R^2+2*R+1);
r_L_b2=-1/(R+1)*(-(R+1)*(R-2*R.*Gr(MIN2:MAX2)+R.*Gr(MIN2:MAX2).^2-1+Gr(MIN2:MAX2).^2)).^(1/2);
r_L_a3=1/(R+1)*(-(R+1)*(R-2*R.*Gr(MIN2:index)+R.*Gr(MIN2:index).^2-1+Gr(MIN2:index).^2)).^(1/2);
interval2= [[.01:.01:.5],[.55:.05:1],[1.1:.1:2],[2.2:.2:5],[6:10],[12:2:20],[30:10:50]];
%plot real axis
plot(Gr, zeros(1,length(Gr)),'r');
%equations were derived using the symbolic toolbox as follows
elseif(R>2)
max_bound = (-1+5^2+R^2)/(5^2+R^2+2*R+1);
else
if(mod(R,.2)==0)
max_bound = (-1+5^2+R^2)/(5^2+R^2+2*R+1);
else
max_bound = (-1+10^2+R^2)/(10^2+R^2+2*R+1);
end
else
if(R==10|R==20)
max_bound = (-1+50^2+R^2)/(50^2+R^2+2*R+1);
r_L_b=-1/(R+1)*(-(R+1)*(R-2*R.*Gr(MIN:index)+R.*Gr(MIN:index).^2-1+Gr(MIN:index).^2)).^(1/2);
r_L_b(1)=0;
r_L_a(1)=0;
r_L_a2=1/(R+1)*(-(R+1)*(R-2*R.*Gr(MIN2:MAX2)+R.*Gr(MIN2:MAX2).^2-1+Gr(MIN2:MAX2).^2)).^(1/2);
elseif(R<5)
if(mod(R,2)==0)
max_bound = (-1+20^2+R^2)/(20^2+R^2+2*R+1);