简单介绍各类陀螺仪的使用
陀螺仪怎么用
陀螺仪怎么用
陀螺仪原理
陀螺仪是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。
主要部分是一个对旋转轴以极高角速度旋转的转子,转子装在一支架内。
它必需转得够快,或者惯量够大(也可以说是角动量要够大)。
只要一个很小的力矩,也会严重影响到它的稳定性。
陀螺仪怎幺用
陀螺的校准比较简单,一般上电后,自己执行即可,然后保存这个零偏,另每次上电得到的零偏都不同,所以需要每次都校准一次。
PX4原生飞控,这点做得很蠢,在QGC地面站的传感器校准页面中,需要用户自己点击进行校准,不会自动执行,当然这个很好改。
陀螺上电自动校准的话,是需要通电后保持静止的,否则校准得到的是一个错误值,所以最好能识别飞行器是否在静止状态,然后再进行校准。
方法也很简单,就是判定两次采集的数据差的和是否超过一定阈值,超过阈值,说明在运动中,这里就不启用校准,LED红灯提示,飞控代码在此不断循环待机,直至静止状态。
MEMS陀螺仪的简要介绍(性能参数和使用)

MEMS陀螺仪的简要介绍(性能参数和使用)MEMS传感器市场浪潮可以从最早的汽车电子到近些年来的消费电子,和即将来到的物联网时代。
如今单一的传感器已不能满足人们对功能、智能的需要,像包括MEMS惯性传感器、MEMS环境传感器、MEMS光学传感器、甚至生物传感器等多种传感器数据融合将成为新时代传感器应用的趋势。
工欲善其事,必先利其器,这里就先以MEMS陀螺仪开始,简要介绍一下MEMS陀螺仪、主要性能参数和使用。
传统机械陀螺仪主要利用角动量守恒原理,即:对旋转的物体,它的转轴指向不会随着承载它的支架的旋转而变化。
MEMS陀螺仪主要利用科里奥利力(旋转物体在有径向运动时所受到的切向力)原理,公开的微机械陀螺仪均采用振动物体传感角速度的概念,利用振动来诱导和探测科里奥利力。
MEMS陀螺仪的核心是一个微加工机械单元,在设计上按照一个音叉机制共振运动,通过科里奥利力原理把角速率转换成一个特定感测结构的位移。
以一个单轴偏移(偏航,YAW)陀螺仪为例,通过图利探讨最简单的工作原理。
两个相同的质量块以方向相反的做水平震荡,如水平方向箭头所示。
当外部施加一个角速率,就会出现一个科氏力,力的方向垂直于质量运动方向,如垂直方向箭头所示。
产生的科氏力使感测质量发生位移,位移大小与所施加的角速率大小成正比。
因为感测器感测部分的动电极(转子)位于固定电极(定子)的侧边,上面的位移将会在定子和转子之间引起电容变化,因此,在陀螺仪输入部分施加的角速率被转化成一个专用电路可以检测的电子参数---电容量。
下图是一种MEMS陀螺仪的系统架构,,陀螺仪的讯号调节电路可以分为马达驱动和加速度计感测电路两个部分。
其中,马达驱动部分是透过静电引动方法,使驱动电路前后振动,为机械元件提供激励;而感测部分透过测量电容变化来测量科氏力在感测质量上产生的位移。
当然,MEMS陀螺仪还具有其它功能模块,比如自检功能电路,低功耗以及运动唤醒电路等等。
下面主要介绍MEMS陀螺仪的主要性能参数。
陀螺仪的使用方法
陀螺仪,也被称为角速度传感器,是一种用于测量和控制物体在相对惯性空间中的角运动的惯检测性器件。
它的基本操作方法包括:
1. 放置和安装:将陀螺仪放置在稳定的平台上,按照指南进行正确的安装。
2. 连接电源:根据陀螺仪的型号和使用说明,将其连接到适当的电源。
3. 校准:初次使用或长时间未使用后,需要进行校准以确保测量结果的准确性。
4. 启动和停止测量:在准备好后,可以启动陀螺仪进行测量;在测量完成后,记得停止测量以保护设备。
5. 数据处理和分析:收集的数据需要经过处理和分析才能得到有用的信息。
正确操作和使用陀螺仪可以保证其测量结果的准确性和稳定性。
具体的操作步骤和注意事项应根据陀螺仪的型号和使用说明来确定。
此外,要注意的是,陀螺仪的使用并不复杂,但是需要一些基本的理解和维护知识。
陀螺经纬仪操作
陀螺经纬仪操作GAK-1陀螺经纬仪操作说明:GAK-1陀螺经纬仪是上架悬挂式陀螺仪器,由陀螺仪、经纬仪、逆变器(带蓄电池)和三脚架组成。
一、首先进行陀螺仪悬带零位测定:先将经纬仪整平并固定照准部,下放陀螺灵敏部,从读数目镜中观测灵敏部的摆动,在分划板上连续读三个逆转点读数,估读到0.1格。
第一和第三个逆转点取平均后,再和第二个逆转点取平均得到陀螺仪的零位。
同时还需要用秒表测定周期。
二、粗略定向在测定已知边和定向边的陀螺方位角之前,必须把经纬仪望远镜视准轴置于近似北方。
最常用的方法为两个逆转点法。
三、精密定向精密定向就是精确测定已知边和定向边的陀螺方位角。
精密定向一般采用逆转点法或者中天法。
逆转点法:1、严格整置经纬仪,以一个测回测定待定和已知测线的方向值,然后将仪器大致对正北方。
2、锁紧摆动系统,启动陀螺马达,待达到额定转速后,下放陀螺灵敏部,进行粗略定向,再制动陀螺并托起锁紧,将望远镜视准轴转到近似北方位置,固定照准部,把水平微动螺旋调到行程中间位置。
3、打开陀螺照明,下放陀螺灵敏部,进行测前悬带零位观测,同时用秒表记录自摆周期。
零位观测完毕,托起并锁紧灵敏部。
4、启动陀螺马达,达到额定转速后,慢慢下放灵敏部到半脱离位置,稍停数秒,再全部下放。
用水平微动螺旋微动照准部,让光标像与分划板零刻划线随时重合,在摆动到逆转点时,连续读取5个逆转点读数。
然后锁紧灵敏部,制动陀螺马达。
5、进行测后零位观测6、以一个测回测定待定和已知测线的方向值中天法:和逆转点法一样进行粗略定向和零位测定,启动陀螺马达,到达额定转速后下放灵敏部,经限幅,使光标像摆幅不超过目镜视场。
然后按下列顺序观测:、1、灵敏部指标线经过分划板零刻划线时启动专用秒表,读取中天时间2、灵敏部指标线到达逆转点时,在分划板上读取摆幅读数3、灵敏部指标线返回零刻划线时读出秒表上的读数4、灵敏部指标线到达另一逆转点时读取摆幅读数5、灵敏部指标线返回零刻划线时再读取秒表上中天时间重复上述操作,一次定向需连续测定5次中天时间,记录不跟踪摆动周期。
陀仪螺的用法

1、4GPS的惯性导航当汽车行驶到隧道或城市高大建筑物附近,没有GPS讯号时,可以通过陀螺仪来测量汽车的偏航或直线运动位移,从而继续导航5通过动作感应控制游戏这也是目前Steve重点介绍的,也是可以给APP开发者更多创新空。
2、若使用的是vivo手机,陀螺仪又叫角速度传感器,可以对手机转动偏转的动作做很好的测量,从而对手机做相应的操作应用到陀螺仪的有游戏相机防抖导航等配置陀螺仪的机型,是默认开启这个功能的。
3、1在vivoy73手机桌面上找到“设置”一项点击并进入2进入设置界面后,下拉设置选项菜单找到并且点击辅助功能,进入辅助功能界面3进入辅助功能界面后找到并且点击重力感应器和陀螺仪校准按钮4跟具提示点击校准就可以。
4、手机陀螺仪作用如下陀螺仪用于测量物理量的偏转倾斜是的动作角速度可精确的分析判断出使用者的实际动作,通过他收集的这些动作给手机下达一些指令能够对手机的偏转角度速度时间等进行测量,从而实现对游戏视野的变化。
5、上下左右旋转手机进行调整具体操作遇到敌人按钮瞄准敌人大概位置,再使用陀螺仪进行微调瞄准,就是玩家通过旋转手机不同角度,使用手机陀螺仪进行上下左右调整镜头位置,配合准心瞄准,从而进行精确击杀甜瓜游乐场。
6、4在设置里面打开陀螺仪,然后进行调整陀螺仪的参数,根据自己的手机以及各方面的问题,来进行调整陀螺仪,只有调整了陀螺仪之后,才可以让陀螺仪更加灵敏5陀螺仪在使用的时候,需要晃动手机,左右平移,然后才可以瞄准敌人。
7、陀螺仪就是水平的方向体感控制器,陀螺仪压枪比较好用,陀螺仪也是可以开枪的,所以可以用这种陀螺仪进行压枪玩家开准星然后射击,这个时候把手机一直往下压,这样准星就一直往下抬,这样就可以达到压枪的目的了在游戏中当。
8、4GPS的惯性导航当汽车行驶到隧道或城市高大建筑物附近,没有GPS讯号时,可以通过陀螺仪来测量汽车的偏航或直线运动位移,从而继续导航5通过动作感应控制游戏这也是目前Steve重点介绍的,也是可以给APP开发者更多创新。
陀螺全站仪使用方法
陀螺全站仪使用方法
陀螺全站仪是一种用于测量地面控制点坐标的仪器,其使用方法如下:
1. 设定基准点:选择一个已知坐标的控制点作为基准点,并将其坐标输入到陀螺全站仪。
2. 安装仪器:将陀螺全站仪安装在三脚架上,确保仪器水平放置。
3. 定位仪器:使用仪器内置的望远镜和准星,通过观察基准点等标志物,将仪器精确定位到控制点上。
4. 进行测量:通过仪器内置的触摸屏或遥控器,选择测量模式,并根据需要进行相应的测量操作,如测量水平、垂直、角度等。
5. 记录测量结果:测量完成后,将测量结果存储在仪器内部存储器中,或通过连接电脑进行导出和处理。
6. 数据处理:将测量的数据导入到后期处理软件中,进行坐标计算和误差校正等处理操作,得到最终的测量结果。
7. 定位下一个控制点:根据需要,移动仪器到下一个控制点,重复以上步骤,继续进行测量。
需要注意的是,使用陀螺全站仪时应注意保持仪器的稳定和精确定位,避免外部干扰和遮挡物的影响,以确保测量结果的准确性。
此外,使用陀螺全站仪需要具备一定的专业知识和技术技能,操作人员应具备相应的培训和资质。
陀螺全站仪使用说明书
陀螺全站仪使用说明书目次1概述1.1功能和用途1.2主要性能参数2仪器组成3工作原理4使用方法4.1三脚架架设4.2陀螺全站仪主机架设4.3维度输入4.4测量程序4.5数据处理4.6仪器撤收5仪器常数标定5.1仪器常数标定方法5.2仪器常数修正方法6电源使用说明7典型故障及故障排除方法8使用注意事项9维护保养10仪器故障及解决方法1概述1.1功能和用途陀螺全站仪是全自动陀螺仪,其主要功能是提供北向方位基准,可为火炮、雷达提供初始方位基准,并可应用于大地测量、工程测量和矿山贯通测量等领域。
1.2主要性能参数仪器主要技术指标见表1。
表1 陀螺全站仪主要技术指标表2仪器组成产品配套情况见表2。
表2 陀螺全站仪产品配套表3工作原理陀螺全站仪的工作原理是用吊丝悬挂重心下移的陀螺灵敏部敏感地球自转角速度的水平分量,在重力作用下,产生一个北向进动的力矩,使陀螺敏感部主轴(即H向量)围绕子午面往复摆动,通过光电传感器将陀螺灵敏部往复摆动的光信号,转换为电信号,传送给控制系统,控制系统自动跟踪陀螺灵敏部的方位摆动,并对灵敏部进行加矩控制,解算出被测目标的北向方位角。
4使用方法陀螺全站仪主机的使用包括全站仪的使用,全站仪的详细使用方法参见相关全站仪的使用说明书。
4.1三脚架架设在测站架设三脚架,架设时应使三脚架的三个脚尖大致与测点标志中心基本等距,并注意脚架的张角和高度,伸缩脚架腿使圆水准器概略居中。
4.2陀螺全站仪主机架设陀螺全站仪主机架设按以下步骤进行操作。
a.取出陀螺全站仪主机。
三脚架架设完毕后,从包装箱中取出主机(切勿大角度倾斜或倒置),然后将其平稳置于三脚架上。
b.陀螺全站仪主机粗对北。
取出包装箱内的磁罗盘,按照其使用说明书规定的方法,确定当地大致北向;将陀螺寻北仪主机粗对北标记置于大致北向(北向可以借助磁罗盘确定,其使用方法见磁罗盘使用说明书);然后顺时针方向旋转锁紧三脚架上的三个对心手轮。
c.取出锂离子电池,放置在三脚架的固定位置上,然后将2芯电源电缆两端分别与主机和电池连接。
陀螺仪模块的原理和使用方法
陀螺仪模块的原理和使用方法
陀螺仪模块的原理是利用角动量守恒定律来测量物体的角速度。
当物体发生旋转时,陀螺仪模块会受到一个与旋转角速度成正比的力矩,通过测量这个力矩的大小和方向,可以得到物体的角速度。
具体来说,三轴陀螺仪模块由三个独立的陀螺仪组成,分别测量物体绕X 轴、Y轴和Z轴的角速度。
通过结合三个方向的角速度测量值,可以得到物体的姿态以及其它与角度相关的信息。
陀螺仪在科学、技术、军事等各个领域有着广泛的应用。
比如:回转罗盘、定向指示仪、炮弹的翻转、陀螺的章动、地球在太阳(月球)引力矩作用下的旋进(岁差)等。
如需更多关于“陀螺仪模块的原理和使用方法”的信息,建议咨询专业技术人员或查看相关技术手册。
陀螺仪测量操作流程

陀螺仪测量操作流程
陀螺仪测量操作流程大致如下:
1. 开启设备:首先启动陀螺仪装置,确保其正常运行并校准零点。
2. 定向设置:确定测量轴向,使陀螺仪的敏感轴对准欲测方向。
3. 数据采集:陀螺仪开始工作时,会连续输出绕各轴转动的速度信息(角速率)。
4. 实时记录:将获取到的角速率数据实时记录,通过内置算法或外部计算设备处理,可转换为角度变化量。
5. 结果分析:整合连续测量得到的数据,可以得出被测物体的绝对姿态、转速或轨迹等信息。
6. 关闭设备:测量结束后,按照规程正确关闭陀螺仪设备,并妥善保存数据。
HGG05型陀螺仪使用说明书

目次1 概述 (2)1.1 功能及用途 (2)1.2 组成 (2)1.3 主要技术指标及使用环境 (7)2 注意事项 (8)3 操作使用 (8)3.1 对使用人员的要求 (8)3.2 操作前准备 (8)3.3 通电及其检查程序 (9)3.4 调整 (10)3.5 操作程序和方法 (12)4 检测 (13)4.1 仪器常数的标定 (13)4.2 经纬仪(全站仪)检校 (13)4.3 激光对中检校 (13)4.4 仪器精度的测量 (14)5 维护与保养 (15)6 24V直流电池组的充电 (15)7 运输和储存 (16)7.1 运输 (16)7.2 储存 (16)8 标装与标配 (16)1概述1.1功能及用途HGG05型陀螺仪(上置经纬仪或全站仪)是一款全自动、全天候的精密定向仪器,可方便快速实现真北方位角的测量。
仪器操作方便、精度高,可广泛应用于矿山、隧道及井下的定向测量。
1.2组成全套仪器由陀螺仪主机、电控箱、电池、三脚架以及连接电缆、电源线和附件组成。
主机上方架设的经纬仪或全站仪标准配置为南方测绘DT-02L型电子经纬仪或南方测绘NTS960型全站仪。
仪器供电方式可选用220V交流或24V直流,采用24V直流供电时,使用配备的电池及相应的电源线与电控箱连接;采用220V交流供电时,使用相应的电源线直接1.主机2.三脚架3.电源线4.电控箱5.电池6.连接电缆图2 仪器外形图(图中上置为标准配置南方测绘DT-02L型电子经纬仪)1.2.1主机主机由陀螺仪和经纬仪(全站仪)组成,构成见图3。
经纬仪(全站仪)用于照准目标读数;脚螺旋用于架设仪器时调平经纬仪(全站仪)上的水泡;主机上的不锈钢标牌指北标记在仪器初始架设时朝北;底部激光对中器激光点架设时对准测站点;电缆插座用于与电缆线连接。
1.经纬仪(全站仪)2.陀螺仪3.电缆插座4.脚螺旋5.激光对中6.仪器标牌图3 陀螺仪主机1.2.2电控箱电控箱是陀螺仪控制、操作和参数设置的主体,主要由控制电路板、操作按键、液晶显示板等组成。
固定翼专用3轴陀螺仪使用说明
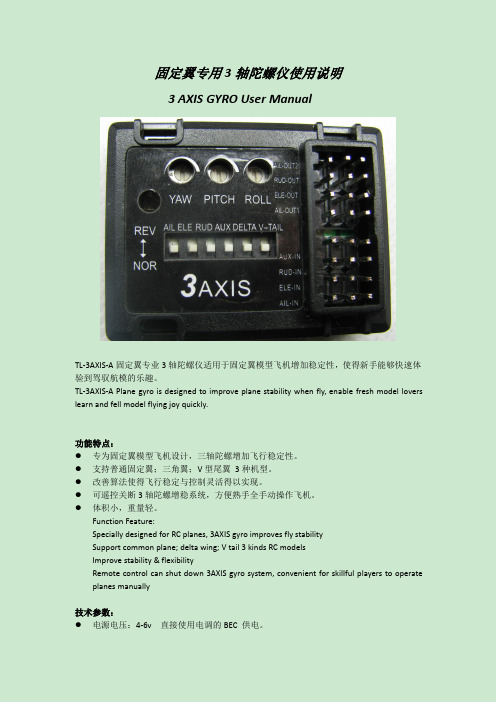
固定翼专用3轴陀螺仪使用说明3AXIS GYRO User ManualTL-3AXIS-A固定翼专业3轴陀螺仪适用于固定翼模型飞机增加稳定性,使得新手能够快速体验到驾驭航模的乐趣。
TL-3AXIS-A Plane gyro is designed to improve plane stability when fly,enable fresh model lovers learn and fell model flying joy quickly.功能特点:●专为固定翼模型飞机设计,三轴陀螺增加飞行稳定性。
●支持普通固定翼;三角翼;V型尾翼3种机型。
●改善算法使得飞行稳定与控制灵活得以实现。
●可遥控关断3轴陀螺增稳系统,方便熟手全手动操作飞机。
●体积小,重量轻。
Function Feature:Specially designed for RC planes,3AXIS gyro improves fly stabilitySupport common plane;delta wing;V tail3kinds RC modelsImprove stability&flexibilityRemote control can shut down3AXIS gyro system,convenient for skillful players to operate planes manually技术参数:●电源电压:4-6v直接使用电调的BEC供电。
●输出信号:普通模拟舵机信号输出。
●外形尺寸:●重量:Technical Parameters:Power voltage:4-6V BEC of ESC supply the power directly.Size:Weight:注意事项:Attention Items:●安装3轴陀螺仪之前需要先确认您的飞机已经正确安装。
Assemble your planes completely before assemble the3AXIS gyro.●关闭遥控器上的V尾混控功能及三角翼混控功能。
陀螺仪使用资料

陀螺仪说明书型号:FT-01一、电路接口接口使用标准5P航空接头,如右图所示。
具体说明如下:接点1:+10V~+15VDC(标准12V)接点2:GND接点3:232信号输出(19200bps、8bit数据位、1bit停止位、无校验)黄接点4:232输入(用于陀螺仪校准,一般情况下不使用,19200bps、8bit数据位、1bit停止位、无校验)绿接点5:复位,低电平有效,正常工作时接3.3V或悬空二、信号输出说明每一帧数据为4个字节,其中内容如下字节数内容意义0 0xff或0xfe 0xff表示正0xfe表示负1 0xXX 角度绝对值乘以10的高8位2 0xXX 角度绝对值乘以10的低8位3 0xXX 字节0、1、2的和校验例如:角度为-385.1°时,收到数据为:FE 0F 0B 18其中:从上往下看,逆时针方向为正三、具体参数测量范围:+-300°/S分辨率:0.1°非线性度:<0.2%零位稳定性:<1°/H频率响应:100Hz四、具体注意事项1、由于陀螺仪上电自检,需要保证在上电或者复位后2S内保证陀螺仪处于静止状态才能正常工作,否则会有较大的零点漂移。
2、五、参考使用程序由于波特率为19200,每帧数据之间几乎无时间间隔,由因为一帧数据为4个字节,及每帧数据占用的发送时间约为2ms,又因为发送帧率为100Hz,两帧数据之间时间间隔为10mS,同时两帧数据之间没有数据发送的时间约为8mS,可做如下处理:申明一个4字节数据缓冲区buffer[4]和一个char型数Readtime=0,每次串口收到数据便将数据写入buffer[Readtime]并将Readtime加1,同时清零并起启动定时器,当定时器计数到t(为了确保定时器中断发生的时间为两帧数据之间的空闲时间,这里t为2mS到8mS 之间的任意数据,为了保险起见取3mS—6mS)时,从buffer[4]中读得的四个数据,再进行校验和正负判断等处理变可得到角度,并且将Readtime清零。
大学实验室JT15型陀螺经纬仪操作规程

大学实验室JT15型陀螺经纬仪操作规程
一、使用须知
1、本仪器防止冲击碰撞。
2、当陀螺灵敏部下放自由摆动时,应进行限幅,使光标象始终在视场内。
不允许光标象跑出视场。
3、必须在托起位置(即锁紧状态)起动或制动陀螺马达。
4、起动陀螺马达后,应注意观察电池电压指示,指针位于红区内,为正常;指针在黑区,表示电池电压不足,应即制动。
待充电后,再行操作。
5、仪器工作时,应避免阳光直射,三脚架应架牢靠。
6、仪器装箱运输时应将止动手轮旋至定位销进入定位孔内,以确保安全。
7、没有陀螺负载时,不得将旋钮扳至起动档,以防损坏电源。
8、段形状的旋钮扳至制动档,制动指示灯即亮,灯灭后,陀螺马达停转。
此时应立即将旋钮扳至关档。
不允许将旋钮长时间扳至制动档,以防损坏逆变器。
二、陀螺经纬仪的操作程序
k严格整置经纬仪,架上陀螺仪,以一个测回测定测线方向值,然后将仪器大致对向北方;
2、仔细下放灵敏部,进行测前零位观测。
下放灵敏部时要严格按说明书进行,操作不当该环节很容易损坏仪器。
3、进行粗略定向,它可由附件粗定向罗盘来完成,也可采用两点逆转点法,四分之一周期法和摆幅法来完成。
4、经纬仪旋转到粗定向方向位置,启动陀螺,待达到额定转速后缓慢的下放陀螺灵敏部,并进行限幅,用微动螺旋跟踪。
跟踪要做到平稳和连续。
5、锁紧陀螺并制动,进行测后零位观测;
6、以一个测回测定测线方向值,前后两测回的互差符合限差时,取其平均值作为测线方向值。
7、观测结束时先托起灵敏部,制动后3-4分钟待陀螺转子停止运转时然后关掉电源,锁紧陀螺。
陀螺仪的应用及原理图
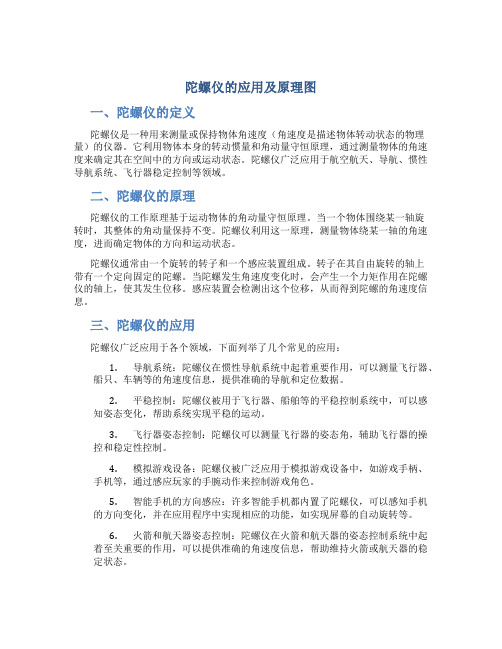
陀螺仪的应用及原理图一、陀螺仪的定义陀螺仪是一种用来测量或保持物体角速度(角速度是描述物体转动状态的物理量)的仪器。
它利用物体本身的转动惯量和角动量守恒原理,通过测量物体的角速度来确定其在空间中的方向或运动状态。
陀螺仪广泛应用于航空航天、导航、惯性导航系统、飞行器稳定控制等领域。
二、陀螺仪的原理陀螺仪的工作原理基于运动物体的角动量守恒原理。
当一个物体围绕某一轴旋转时,其整体的角动量保持不变。
陀螺仪利用这一原理,测量物体绕某一轴的角速度,进而确定物体的方向和运动状态。
陀螺仪通常由一个旋转的转子和一个感应装置组成。
转子在其自由旋转的轴上带有一个定向固定的陀螺。
当陀螺发生角速度变化时,会产生一个力矩作用在陀螺仪的轴上,使其发生位移。
感应装置会检测出这个位移,从而得到陀螺的角速度信息。
三、陀螺仪的应用陀螺仪广泛应用于各个领域,下面列举了几个常见的应用:1.导航系统:陀螺仪在惯性导航系统中起着重要作用,可以测量飞行器、船只、车辆等的角速度信息,提供准确的导航和定位数据。
2.平稳控制:陀螺仪被用于飞行器、船舶等的平稳控制系统中,可以感知姿态变化,帮助系统实现平稳的运动。
3.飞行器姿态控制:陀螺仪可以测量飞行器的姿态角,辅助飞行器的操控和稳定性控制。
4.模拟游戏设备:陀螺仪被广泛应用于模拟游戏设备中,如游戏手柄、手机等,通过感应玩家的手腕动作来控制游戏角色。
5.智能手机的方向感应:许多智能手机都内置了陀螺仪,可以感知手机的方向变化,并在应用程序中实现相应的功能,如实现屏幕的自动旋转等。
6.火箭和航天器姿态控制:陀螺仪在火箭和航天器的姿态控制系统中起着至关重要的作用,可以提供准确的角速度信息,帮助维持火箭或航天器的稳定状态。
四、陀螺仪的类型根据工作原理和结构不同,陀螺仪可以分为以下几种类型:1.旋转陀螺仪:使用一个旋转的陀螺来测量角速度。
常见的有机械陀螺仪和光学陀螺仪。
2.振动陀螺仪:利用振动的原理来进行测量。
陀螺仪设置使用技巧

陀螺仪设置使用技巧陀螺仪是一种用于测量角速度和角度的装置,广泛应用于飞行器、汽车、手机等领域。
正确设置和使用陀螺仪可以提高其测量精度和可靠性,以下是一些陀螺仪设置使用技巧。
首先,正确安装陀螺仪非常重要。
陀螺仪通常有三个轴,分别是俯仰轴、滚转轴和偏航轴。
安装时,必须确保陀螺仪的轴与被测量对象的轴保持一致,这样才能获得准确的测量结果。
同时,陀螺仪应尽量远离干扰源,例如电磁场和振动物体,避免测量误差的产生。
其次,注意校准陀螺仪。
陀螺仪在使用前需要进行校准,以调整其零位和灵敏度。
通常可以通过软件或硬件来进行校准。
在校准时,需要让陀螺仪处于稳定的状态下,以获得准确的校准结果。
同时,还需要根据具体使用场景进行调整,例如对于飞行器来说,可以校准陀螺仪的角速度和加速度,以提高飞行稳定性。
此外,要合理选择陀螺仪的采样率和输出频率。
采样率是指每秒钟陀螺仪获取数据的次数,它决定了陀螺仪的测量精度和响应速度。
较高的采样率可以获得更准确的测量结果,但也会增加数据处理的负担。
输出频率是指陀螺仪向外部设备输出数据的频率,通常通过串口或I2C总线进行数据传输。
合理选择采样率和输出频率可以根据具体应用需求来确定,以平衡精度和性能。
最后,使用陀螺仪时要注意对数据进行滤波和处理。
陀螺仪的测量数据常常会受到噪声的干扰,因此需要使用数字滤波器或卡尔曼滤波器对数据进行处理,以提高测量精度。
此外,还可以使用陀螺仪数据与其他传感器(例如加速度计)的数据进行融合,以获取更准确和可靠的姿态信息。
总之,正确设置和使用陀螺仪是确保其测量精度和可靠性的关键。
安装陀螺仪时要注意轴向一致和避免干扰源,校准时要稳定且根据具体场景调整,选择合理的采样率和输出频率,对数据进行滤波和处理。
只有在综合考虑这些因素的情况下,我们才能充分发挥陀螺仪的优势,并有效应用于不同领域。
陀螺全站仪使用说明书
陀螺全站仪使用说明书目次1概述1.1功能和用途1.2主要性能参数2仪器组成3工作原理4使用方法4.1三脚架架设4.2陀螺全站仪主机架设4.3维度输入4.4测量程序4.5数据处理4.6仪器撤收5仪器常数标定5.1仪器常数标定方法5.2仪器常数修正方法6电源使用说明7典型故障及故障排除方法8使用注意事项9维护保养10仪器故障及解决方法1概述1.1功能和用途陀螺全站仪是全自动陀螺仪,其主要功能是提供北向方位基准,可为火炮、雷达提供初始方位基准,并可应用于大地测量、工程测量和矿山贯通测量等领域。
1.2主要性能参数仪器主要技术指标见表1。
表1 陀螺全站仪主要技术指标表2仪器组成产品配套情况见表2。
表2 陀螺全站仪产品配套表3工作原理陀螺全站仪的工作原理是用吊丝悬挂重心下移的陀螺灵敏部敏感地球自转角速度的水平分量,在重力作用下,产生一个北向进动的力矩,使陀螺敏感部主轴(即H向量)围绕子午面往复摆动,通过光电传感器将陀螺灵敏部往复摆动的光信号,转换为电信号,传送给控制系统,控制系统自动跟踪陀螺灵敏部的方位摆动,并对灵敏部进行加矩控制,解算出被测目标的北向方位角。
4使用方法陀螺全站仪主机的使用包括全站仪的使用,全站仪的详细使用方法参见相关全站仪的使用说明书。
4.1三脚架架设在测站架设三脚架,架设时应使三脚架的三个脚尖大致与测点标志中心基本等距,并注意脚架的张角和高度,伸缩脚架腿使圆水准器概略居中。
4.2陀螺全站仪主机架设陀螺全站仪主机架设按以下步骤进行操作。
a.取出陀螺全站仪主机。
三脚架架设完毕后,从包装箱中取出主机(切勿大角度倾斜或倒置),然后将其平稳置于三脚架上。
b.陀螺全站仪主机粗对北。
取出包装箱内的磁罗盘,按照其使用说明书规定的方法,确定当地大致北向;将陀螺寻北仪主机粗对北标记置于大致北向(北向可以借助磁罗盘确定,其使用方法见磁罗盘使用说明书);然后顺时针方向旋转锁紧三脚架上的三个对心手轮。
c.取出锂离子电池,放置在三脚架的固定位置上,然后将2芯电源电缆两端分别与主机和电池连接。
陀螺仪原理及应用
陀螺仪原理及应用一、引言陀螺仪作为一种重要的测量仪器,广泛应用于航空、航天、导航、惯性导航等领域。
它以其高精度、快速响应和稳定性而受到广泛关注。
本文将从陀螺仪的原理开始,介绍其工作原理和应用。
二、陀螺仪的原理陀螺仪的工作原理基于陀螺效应,即旋转物体受到外力作用时会产生力矩,使其保持自身的方向。
陀螺仪利用这一原理,通过测量旋转物体的角速度,来确定物体的方向。
陀螺仪通常由一个旋转的转子和一个固定的支架组成。
当转子旋转时,由于陀螺效应的作用,转子会产生一个力矩,使得支架发生旋转。
通过测量支架的旋转角度,可以确定转子的角速度,从而得到物体的方向。
三、陀螺仪的应用1. 航空航天领域陀螺仪在航空航天领域中有着广泛的应用。
在飞行器中,陀螺仪可以用来测量飞行器的姿态和角速度,从而帮助飞行员掌握飞行器的状态,进行精确的操作。
同时,在导航系统中,陀螺仪也可以用来提供精确的定位和导航信息。
2. 惯性导航系统陀螺仪在惯性导航系统中起到了重要的作用。
惯性导航系统利用陀螺仪测量物体的加速度和角速度,从而确定物体的位置和姿态。
这种系统不受外界环境的影响,具有高精度和稳定性,广泛应用于船舶、飞机、导弹等领域。
3. 移动设备陀螺仪也广泛应用于移动设备中,如智能手机、平板电脑等。
通过陀螺仪的测量,可以实现设备的自动旋转和姿态感知。
这为用户提供了更加便捷和直观的操作体验,例如屏幕自动旋转、重力感应游戏等。
4. 车辆导航系统陀螺仪在车辆导航系统中也有着重要的应用。
通过陀螺仪的测量,可以实时获取车辆的姿态和角速度信息,从而提供更加准确的导航和定位服务。
这对于车辆安全和驾驶体验的提升具有重要意义。
四、总结陀螺仪作为一种重要的测量仪器,具有广泛的应用前景。
它的工作原理基于陀螺效应,通过测量旋转物体的角速度来确定物体的方向。
陀螺仪在航空航天、导航、惯性导航和移动设备等领域都有着重要的应用。
随着技术的不断发展,陀螺仪的精度和稳定性将得到进一步提升,为各个领域带来更多的应用机会。
简单介绍各类陀螺仪的使用

简单介绍各类陀螺仪的使用简单介绍各类陀螺仪的使用最近,被安排调试MPU6050模块,之前从没接触过相关MEMS 传感器,所以感觉一头雾水。
幸好还有网络,还有强大的兄弟团的支持。
不过,很可惜,网上大部分资料只是简单教你如何配置MPU6050并从数据寄存器读出测量值,而之后的数据处理很少涉及。
这使得像我一样的菜鸟们十分抓狂。
所以在此开辟专栏,希望大家集思广益,共同征服MPU6050。
对于那些还不知道MPU6050是啥玩意的童鞋们,百度文科会告诉你。
由于对此传感器的介绍铺天盖地,所以此处就一笔带过,不再详细介绍。
毫无疑问,无论是学习MPU6050,还是其他ICs,大家首先想到的是数据手册。
没错,MPU6050有两个非常重要的数据手册,一个是PS-MPU- 6000A,另一个是RM-MPU-6000A。
其他的都是原厂评估板的相关使用手册,对我们屌丝来说可以不用拜读了。
PS-MPU-6000A是产品说明书,主要介绍了内部的结构、技术参数以及封装等内容;RM-MPU-6000A(*)是寄存器映射和描述文档,里面详细介绍了MPU6050内部各个寄存器的实现功能,对我们用户来说相当重要。
网上虽然有一些翻译的中文资料,但自己还是硬着头皮仔细研读了一下两个手册。
下面就把自己的心得和大家一起分享一下(产品说明书网上已有中文版,这里着重讲一下第二个数据手册)。
RM-MPU-6000A列出了将近100个寄存器,还有一部分寄存器没有列出来,估计是不对用户开放的。
这些寄存器大致上可分为如下几类:自检寄存器、陀螺仪加速度配置寄存器、总线配置相关寄存器、中断配置寄存器、数据寄存器、第三方传感器配置寄存器、FIFO相关寄存器、系统配置寄存器。
第一次看到这么多寄存器时倒吸一口凉气,相信很多网友会跟我有相同的感觉。
其实,仔细分析下来,真正需要你配置的寄存器也就一半左右。
由于我手中的MPU6050模块并没有外接第三方传感器,所以需要配置的寄存器就更少了。
陀螺仪简介及操作

陀螺仪定轴性:陀螺轴在不受外力作用时,它的方向始终指向初始恒定方向;如右下图,左端为一可转动的陀螺,右端为一可移动的悬重。
当调节悬重的位置使杠杆水平时,可以看到陀螺转动后,其轴线的方向始终保持不变,即可验证定轴性。
进动性:陀螺轴在受到外力作用时,将产生非常重要的效应-“进动”。
当将悬重向左移动一小段距离,即相当于陀螺轴受到一个向下的作用力时,陀螺转动后,杠杆将保持水平,但将在水平面上作逆时针方向的转动;陀螺仪各部件作用以及安装方法:(1)全站仪(2)陀螺仪(3)逆变器(4)电池(5)电源电缆NOTE:逆变器灯变绿方可操作,变红必须立刻关机陀螺仪在运输保管时的条件:运输避免震动,保管时防潮NOTE:1、如果运输途中路况很差,需要人员抱住陀螺仪仪器箱子,避免震动2、在矿井下如果陀螺仪上面被滴水,一定要擦干后风干一晚上,不可在潮湿状态放回仪器箱如果遇到定向误差大等问题应如何解决:操作问题产生的误差要及时解决,硬件损伤的问题一定联系维修人员,禁止自行解决高精度对中整平:陀螺仪对整平精度要求很高,避免在震动环境下工作,需要掌握点下对中方法.所谓点下对中,就是利用铅坠指向仪器提手中心的点来达到对中,在全站仪架设好后要进行整平,在陀螺仪架设好后需要进行二次整平,整平精度应尽量优于10秒,如果在测量状态中出现了仪器整平失衡,必须终止测量重新整平.电源系统的正确安装与开机:电源与逆变器、陀螺仪部分的正确安装,锁紧螺旋在完全锁紧状态下开机,逆变器灯变绿方可进行操作等.仪器关机的操作:关机时陀螺锁紧螺旋保证完全锁紧,关闭电源等待15分钟才可拆卸零位检查:开机前与关机后都需下放锁紧螺旋进行零位检核,记录数值判断摆丝状态,零位检查需要左右读数之差不大于一个格,并且必须读数摆幅达到6-10个格内方可读数.如果零位差超过1个格,需要进行摆丝的调整,严禁非维修人员进行.测量过程:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简单介绍各类陀螺仪的使用最近,被安排调试MPU6050模块,之前从没接触过相关MEMS传感器,所以感觉一头雾水。
幸好还有网络,还有强大的兄弟团的支持。
不过,很可惜,网上大部分资料只是简单教你如何配置MPU6050并从数据寄存器读出测量值,而之后的数据处理很少涉及。
这使得像我一样的菜鸟们十分抓狂。
所以在此开辟专栏,希望大家集思广益,共同征服MPU6050。
对于那些还不知道MPU6050是啥玩意的童鞋们,百度文科会告诉你。
由于对此传感器的介绍铺天盖地,所以此处就一笔带过,不再详细介绍。
毫无疑问,无论是学习MPU6050,还是其他ICs,大家首先想到的是数据手册。
没错,MPU6050有两个非常重要的数据手册,一个是PS-MPU- 6000A,另一个是RM-MPU-6000A。
其他的都是原厂评估板的相关使用手册,对我们屌丝来说可以不用拜读了。
PS-MPU-6000A是产品说明书,主要介绍了内部的结构、技术参数以及封装等内容;RM-MPU-6000A(*)是寄存器映射和描述文档,里面详细介绍了MPU6050内部各个寄存器的实现功能,对我们用户来说相当重要。
网上虽然有一些翻译的中文资料,但自己还是硬着头皮仔细研读了一下两个手册。
下面就把自己的心得和大家一起分享一下(产品说明书网上已有中文版,这里着重讲一下第二个数据手册)。
RM-MPU-6000A列出了将近100个寄存器,还有一部分寄存器没有列出来,估计是不对用户开放的。
这些寄存器大致上可分为如下几类:自检寄存器、陀螺仪加速度配置寄存器、总线配置相关寄存器、中断配置寄存器、数据寄存器、第三方传感器配置寄存器、FIFO相关寄存器、系统配置寄存器。
第一次看到这么多寄存器时倒吸一口凉气,相信很多网友会跟我有相同的感觉。
其实,仔细分析下来,真正需要你配置的寄存器也就一半左右。
由于我手中的MPU6050模块并没有外接第三方传感器,所以需要配置的寄存器就更少了。
下面我们就一起来学习一下一些比较重要的寄存器。
系统配置寄存器1、PWR_MGMT_1该寄存器用来配置工作模式和时钟源。
此外,还可以通过配置该寄存器复位整个器件以及禁止使用温度传感器。
偶设置为0x08,处于正常工作模式,禁止使用温度传感器,选用内部8MHZ的时钟源。
2、PWR_MGMT_2该寄存器用来配置加速度计模式下的唤醒频率和待机模式。
3、USER_CTRL该寄存器用来使能或禁止FIFO缓冲、IIC主模式、和IIC接口。
4、MOT_DETECT_CTRL该寄存器用来添加加速度计上电的延迟时间,默认是延时为4ms。
5、SIGNAL_PATH_RESET该寄存器用来复位各个传感器的信号通路。
陀螺仪加速度配置寄存器1、SMPRT_DIV该寄存器用来产生采样率(Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV))。
偶设置为0x07,典型值。
2、CONFIG该寄存器用来配置FSYNC管脚采样率和数字低通滤波器。
3、GYRO_CONFIG该寄存器用来启动陀螺仪自检和设置陀螺仪测量范围(用户可根据自己的要求进行设置)。
4、ACCEL_CONFIG该寄存器用来启动加速度计自检和设置加速度计测量范围(用户可根据自己的要求进行设置)。
手册上说也能配置高通滤波器,但剩余的低三位没用到,不知如何设置?I2C配置相关寄存器INT_PIN_CFG寄存器I2C_BYPASS_EN位置1,USER_CTRL寄存器I2C_MST_EN置0,使得主控制器的I2与 MPU6050的AUXI2C 直通。
中断配置寄存器1、INT_PIN_CFG该寄存器用来配置INT管脚的中断行为。
偶设置为0x30,推挽输出,高电平有效,发生中断时INT管脚被拉高,任何读操作都会清除中断。
2、INT_ENABLE该寄存器用来使能各种中断源。
偶设置为0x01,使能数据准备好中断。
当此中断产生时,可以读取传感器的数据寄存器来获取测量值(手册上说当完成写操作时会触发此中断,不知道是怎么回事,偶这样设置也能正常工作)。
3、INT_STATUS中断状态寄存器,可以通过读取相应中断标志位来清除中断。
上面所介绍的寄存器主要是初始化MPU6050时大概用到的寄存器,按如上配置,MPU6050可正常工作。
对于手册上的一些内容依然迷茫,望解答。
********************************************************************* **********// 陀螺仪 MPU6050 IIC测试程序********************************************************************* **********/#include "stm32f10x_lib.h"#include //Keil libraryGPIO_InitTypeDef GPIO_InitStructure;ErrorStatus HSEStartUpStatus;#define uchar unsigned char#define uint unsigned int// 定义MPU6050内部地址//****************************************#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)#define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)#define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz)#define ACCEL_XOUT_H 0x3B#define ACCEL_XOUT_L 0x3C#define ACCEL_YOUT_H 0x3D#define ACCEL_YOUT_L 0x3E#define ACCEL_ZOUT_H 0x3F#define ACCEL_ZOUT_L 0x40//#define TEMP_OUT_H 0x41//#define TEMP_OUT_L 0x42//#define GYRO_XOUT_H 0x43#define GYRO_XOUT_L 0x44#define GYRO_YOUT_H 0x45#define GYRO_YOUT_L 0x46#define GYRO_ZOUT_H 0x47#define GYRO_ZOUT_L 0x48#define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)//#define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读)/****************************#define MPU6050_Addr 0xD0 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改unsigned char TX_DATA[4]; //显示据缓存区unsigned char BUF[10]; //接收数据缓存区char test=0; //IIC用到short T_X,T_Y,T_Z,T_T; //X,Y,Z轴,温度//************************************/*模拟IIC端口输出输入定义*/#define SCL_H GPIOB->BSRR = GPIO_Pin_6#define SCL_L GPIOB->BRR = GPIO_Pin_6#define SDA_H GPIOB->BSRR = GPIO_Pin_7#define SDA_L GPIOB->BRR = GPIO_Pin_7#define SCL_read GPIOB->IDR & GPIO_Pin_6#define SDA_read GPIOB->IDR & GPIO_Pin_7/* 函数申明 -----------------------------------------------*/ void RCC_Configuration(void);void GPIO_Configuration(void);void NVIC_Configuration(void);void USART1_Configuration(void);void WWDG_Configuration(void);void Delay(u32 nTime);void Delayms(vu32 m);/* 变量定义 ----------------------------------------------*//*******************************/void DATA_printf(uchar *s,short temp_data){if(temp_data<0){temp_data=-temp_data;*s='-';}else *s=' ';*++s =temp_data/100+0x30;temp_data=temp_data%100; //取余运算*++s =temp_data/10+0x30;temp_data=temp_data%10; //取余运算*++s =temp_data+0x30;/******************************************************************** ************ Function Name : I2C_GPIO_Config* Description : Configration Simulation IIC GPIO* Input : None* Output : None* Return : None********************************************************************* ********* */void I2C_GPIO_Config(void){GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_Init(GPIOB, &GPIO_InitStructure);}/******************************************************************** ************ Function Name : I2C_delay* Description : Simulation IIC Timing series delay* Input : None* Output : None* Return : Nonevoid I2C_delay(void){u8 i=30; //这里可以优化速度,经测试最低到5还能写入while(i){i--;}}void delay5ms(void)int i=5000;while(i){i--;}}/******************************************************************** ************ Function Name : I2C_Start* Description : Master Start Simulation IIC Communication* Input : None* Output : None* Return : Wheather Start********************************************************************* ********* */bool I2C_Start(void){SDA_H;SCL_H;I2C_delay();if(!SDA_read)return FALSE; //SDA线为低电平则总线忙,退出SDA_L;I2C_delay();if(SDA_read) return FALSE; //SDA线为高电平则总线出错,退出SDA_L;I2C_delay();return TRUE;}/******************************************************************** ************ Function Name : I2C_Stop* Description : Master Stop Simulation IIC Communication* Input : None* Output : None* Return : None********************************************************************* ********* */void I2C_Stop(void){SCL_L;I2C_delay();SDA_L;SCL_H;I2C_delay();SDA_H;I2C_delay();}/******************************************************************** ************ Function Name : I2C_Ack* Description : Master Send Acknowledge Single* Input : None* Output : None* Return : None********************************************************************* ********* */void I2C_Ack(void){SCL_L;I2C_delay();SDA_L;I2C_delay();SCL_H;I2C_delay();SCL_L;I2C_delay()}/******************************************************************** ************ Function Name : I2C_NoAck* Description : Master Send No Acknowledge Single* Input : None* Output : None* Return : None********************************************************************* ********* */void I2C_NoAck(void){SCL_L;I2C_delay();SDA_H;I2C_delay();SCL_H;I2C_delay();SCL_L;}/******************************************************************** ************ Function Name : I2C_WaitAck* Description : Master Reserive Slave Acknowledge Single* Input : None* Output : None* Return : Wheather Reserive Slave Acknowledge Single********************************************************************* ********* */bool I2C_WaitAck(void) //返回为:=1有ACK,=0无ACK{SCL_L;I2C_delay();SDA_H;I2C_delay();SCL_H;I2C_delay();if(SDA_read){SCL_L;I2C_delay();return FALSE;}SCL_L;I2C_delay();return TRUE;}/******************************************************************** ************ Function Name : I2C_SendByte* Description : Master Send a Byte to Slave* Input : Will Send Date* Output : None* Return : None********************************************************************* ********* */void I2C_SendByte(u8 SendByte) //数据从高位到低位//{u8 i=8;while(i--){SCL_L;if(SendByte&0x80)SDA_H;elseSDA_L;SendByte<<=1;I2C_delay();SCL_H;I2C_delay();}SCL_L;}/******************************************************************** ************ Function Name : I2C_RadeByte* Description : Master Reserive a Byte From Slave* Input : None* Output : None* Return : Date From Slave********************************************************************* ********* */unsigned char I2C_RadeByte(void) //数据从高位到低位//{u8 i=8;u8 ReceiveByte=0;SDA_H;while(i--){ReceiveByte<<=1;SCL_L;I2C_delay();SCL_H;I2C_delay();if(SDA_read){ReceiveByte|=0x01;}}SCL_L;return ReceiveByte;}//ZRX//单字节写入*******************************************bool Single_Write(unsigned char SlaveAddress,unsigned charREG_Address,unsigned char REG_data) //void{if(!I2C_Start())return FALSE;I2C_SendByte(SlaveAddress); //发送设备地址+写信号//I2C_SendByte(((REG_Address & 0x0700) >>7) | SlaveAddress & 0xFFFE);//设置高起始地址+器件地址if(!I2C_WaitAck()){I2C_Stop(); return FALSE;}I2C_SendByte(REG_Address ); //设置低起始地址I2C_WaitAck();I2C_SendByte(REG_data);I2C_WaitAck();I2C_Stop();delay5ms();return TRUE;}//单字节读取*****************************************unsigned char Single_Read(unsigned char SlaveAddress,unsigned char REG_Address){ unsigned char REG_data;if(!I2C_Start())return FALSE;I2C_SendByte(SlaveAddress); //I2C_SendByte(((REG_Address & 0x0700) >>7) | REG_Address & 0xFFFE);//设置高起始地址+器件地址if(!I2C_WaitAck()){I2C_Stop();test=1; return FALSE;}I2C_SendByte((u8) REG_Address); //设置低起始地址I2C_WaitAck();I2C_Start();I2C_SendByte(SlaveAddress+1);I2C_WaitAck();REG_data= I2C_RadeByte();I2C_NoAck();I2C_Stop();//return TRUE;return REG_data;}/********************************************************************** ************* 函数名称: RCC_Configuration(void)** 函数功能:时钟初始化** 输入:无** 输出:无** 返回:无void RCC_Configuration(void){/* RCC system reset(for debug purpose) */RCC_DeInit();/* Enable HSE */RCC_HSEConfig(RCC_HSE_ON);/* Wait till HSE is ready */HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus == SUCCESS){/* HCLK = SYSCLK */RCC_HCLKConfig(RCC_SYSCLK_Div1);/* PCLK2 = HCLK */RCC_PCLK2Config(RCC_HCLK_Div1);/* PCLK1 = HCLK/2 */RCC_PCLK1Config(RCC_HCLK_Div2);/* Flash 2 wait state */FLASH_SetLatency(FLASH_Latency_2);/* Enable Prefetch Buffer */FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);/* PLLCLK = 8MHz * 9 = 72 MHz */RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);/* Enable PLL */RCC_PLLCmd(ENABLE);/* Wait till PLL is ready */while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET) {}/* Select PLL as system clock source */RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);/* Wait till PLL is used as system clock source */while(RCC_GetSYSCLKSource() != 0x08){}}/* Enable GPIOA, GPIOB, GPIOC, GPIOD, GPIOE, GPIOF, GPIOG and AFIO clocks */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB , ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD , ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE | RCC_APB2Periph_GPIOF , ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG | RCC_APB2Periph_AFIO , ENABLE);}/********************************************************************** ************* 函数名称: GPIO_Configuration(void)** 函数功能:端口初始化** 输入:无** 输出:无** 返回:无********************************************************************* ************/void GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD, ENABLE );/* Configure USART1 Tx (PA.09) as alternate function push-pull */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // 选中管脚9GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 最高输出速率50MHz GPIO_Init(GPIOA, &GPIO_InitStructure); // 选择A端口/* Configure USART1 Rx (PA.10) as input floating */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //选中管脚10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure); //选择A端口}/********************************************************************** ************* 函数名称: USART1_Configuration(void)** 函数功能:串口1初始化** 输入:无** 输出:无** 返回:无********************************************************************* ************/void USART1_Configuration(void){USART_InitTypeDef USART_InitStructure;USART_ClockInitTypeDef USART_ClockInitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1 |RCC_APB2Periph_USART1, ENABLE );USART_ART_Clock = USART_Clock_Disable; // 时钟低电平活动USART_ART_CPOL = USART_CPOL_Low; // 时钟低电平USART_ART_CPHA = USART_CPHA_2Edge; // 时钟第二个边沿进行数据捕获USART_ART_LastBit = USART_LastBit_Disable; // 最后一位数据的时钟脉冲不从SCLK输出/* Configure the USART1 synchronous paramters */USART_ClockInit(USART1, &USART_ClockInitStructure); // 时钟参数初始化设置USART_ART_BaudRate =9600; // 波特率为:115200 USART_ART_WordLength = USART_WordLength_8b; // 8位数据USART_ART_StopBits = USART_StopBits_1; // 在帧结尾传输1个停止位USART_ART_Parity = USART_Parity_No ; // 奇偶失能USART_ART_HardwareFlowControl =USART_HardwareFlowControl_None; // 硬件流控制失能USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 发送使能+接收使能/* Configure USART1 basic and asynchronous paramters */USART_Init(USART1, &USART_InitStructure);/* Enable USART1 */USART_ClearFlag(USART1, USART_IT_RXNE); //清中断,以免一启用中断后立即产生中断USART_ITConfig(USART1,USART_IT_RXNE, ENABLE); //使能USART1中断源USART_Cmd(USART1, ENABLE); //USART1总开关:开启}/********************************************************************** ************* 函数名称: NVIC_Configuration(void)** 函数功能:中断初始化** 输入:无** 输出:无** 返回:无********************************************************************* ************/void NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);NVIC_InitStructure.NVIC_IRQChannel = WWDG_IRQChannel;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_Init(&NVIC_InitStructure);}/********************************************************************** ************* 函数名称: WWDG_Configuration(void)** 函数功能:看门狗初始化** 输入:无** 输出:无** 返回:无********************************************************************* ************/void WWDG_Configuration(void){RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE);WWDG_SetPrescaler(WWDG_Prescaler_8); // WWDG clock counter = (PCLK1/4096)/8 = 244 Hz (~4 ms)WWDG_SetWindowValue(0x41); // Set Window value to 0x41WWDG_Enable(0x50); // Enable WWDG and set counter value to 0x7F, WWDG timeout = ~4 ms * 64 = 262 msWWDG_ClearFlag(); // Clear EWI flagWWDG_EnableIT(); // Enable EW interrupt}/********************************************************************** ************* 函数名称: Delay(vu32 nCount)** 函数功能:延时函数** 输入:无** 输出:无** 返回:无********************************************************************* ************/void Delay(vu32 nCount){for(; nCount != 0; nCount--);}/********************************************************************** ************* 函数名称: void Delayms(vu32 m)** 函数功能:长延时函数 m=1,延时1ms** 输入:无** 输出:无** 返回:无********************************************************************* ************/void Delayms(vu32 m){u32 i;for(; m != 0; m--)for (i=0; i<50000; i++);}/********************************************************************** ************* 函数名称: WWDG_IRQHandler(void)** 函数功能:窗口提前唤醒中断** 输入:无** 输出:无** 返回:无void WWDG_IRQHandler(void){/* Update WWDG counter */WWDG_SetCounter(0x50);/* Clear EWI flag */WWDG_ClearFlag();}//************************************************void USART1_SendData(uchar SendData){USART_SendData(USART1, SendData);Delayms(1);}//初始化MPU6050,根据需要请参考pdf进行修改************************ void Init_MPU6050(void){Single_Write(MPU6050_Addr,PWR_MGMT_1, 0x00); //解除休眠状态Single_Write(MPU6050_Addr,SMPLRT_DIV, 0x07);Single_Write(MPU6050_Addr,CONFIG, 0x06);Single_Write(MPU6050_Addr,GYRO_CONFIG, 0x18);Single_Write(MPU6050_Addr,ACCEL_CONFIG, 0x01);}//******读取MPU6050数据**************************************** void READ_MPU6050(void){BUF[0]=Single_Read(MPU6050_Addr,GYRO_XOUT_L);BUF[1]=Single_Read(MPU6050_Addr,GYRO_XOUT_H);T_X= (BUF[1]<<8)|BUF[0];T_X/=16.4; //读取计算X轴数据BUF[2]=Single_Read(MPU6050_Addr,GYRO_YOUT_L);BUF[3]=Single_Read(MPU6050_Addr,GYRO_YOUT_H);T_Y= (BUF[3]<<8)|BUF[2];T_Y/=16.4; //读取计算Y轴数据BUF[4]=Single_Read(MPU6050_Addr,GYRO_ZOUT_L);BUF[5]=Single_Read(MPU6050_Addr,GYRO_ZOUT_H);T_Z= (BUF[5]<<8)|BUF[4];T_Z/=16.4; //读取计算Z轴数据// BUF[6]=Single_Read(MPU6050_Addr,TEMP_OUT_L);// BUF[7]=Single_Read(MPU6050_Addr,TEMP_OUT_H);// T_T=(BUF[7]<<8)|BUF[6];// T_T = 35+ ((double) (T_T + 13200)) / 280;// 读取计算出温度}//********串口发送数据***************************************void Send_data(uchar axis){uchar i;USART1_SendData(axis);USART1_SendData(':');for(i=0;i<4;i++)USART1_SendData(TX_DATA[i]);USART1_SendData(' ');USART1_SendData(' ');}/********************************************************************** ************* 函数名称: main(void)** 函数功能:主函数** 输入:无** 输出:无** 返回:无********************************************************************* ************/int main(void){RCC_Configuration(); //配置RCCGPIO_Configuration(); //配置GPIOUSART1_Configuration(); //配置串口1I2C_GPIO_Config(); //配置IIC使用端口Delayms(10); //延时Init_MPU6050(); //初始化MPU6050while(1){READ_MPU6050(); //读取MPU6050数据DATA_printf(TX_DATA,T_X);//转换X轴数据到数组Send_data('X'); //发送X轴数DATA_printf(TX_DATA,T_Y);//转换Y轴数据到数组Send_data('Y'); //发送Y轴数DATA_printf(TX_DATA,T_Z);//转换Z轴数据到数组Send_data('Z'); //发送Z轴数// DATA_printf(TX_DATA,T_T);//转换温度数据到数组// Send_data('T'); //发送温度数据USART1_SendData(0X0D); //换行USART1_SendData(0X0A); //回车Delayms(5); //延时}}/*************结。