运动控制指令介绍
FANUC工业机器人常用指令

FANUC工业机器人常用指令简介FANUC工业机器人是一种广泛应用于工业生产中的自动化设备,其具有高精度、高效率、高可靠性和高稳定性的特点。
为了控制和操作这些机器人,我们需要了解一些常用的指令。
本文档将介绍一些FANUC工业机器人常用指令,包括运动控制指令、传感器与外部设备的指令和系统控制指令。
运动控制指令PTPPTP(Point to Point)是一种常用的运动控制指令,用于控制机器人从一个点(起始点)到另一个点(目标点)的运动。
指令格式:PTP X, Y, Z, A, B, C, VEL, ACC•X, Y, Z:目标点的坐标值。
•A, B, C:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
LINLIN(Linear)指令用于控制机器人沿直线路径运动,从一个点(起始点)到另一个点(目标点),可以控制线性路径上的速度和加速度。
指令格式:LIN X, Y, Z, A, B, C, VEL, ACC•X, Y, Z:目标点的坐标值。
•A, B, C:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
CIRCCIRC(Circular)指令用于控制机器人沿圆弧路径运动。
圆弧由起始点、目标点和中心点定义。
指令格式:CIRC X1, Y1, Z1, A1, B1, C1, X2, Y2, Z2, A2, B 2, C2, VEL, ACC•X1, Y1, Z1:起始点的坐标值。
•A1, B1, C1:起始点的姿态(角度值)。
•X2, Y2, Z2:目标点的坐标值。
•A2, B2, C2:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
传感器与外部设备的指令READREAD指令用于读取外部设备的输入信号值。
指令格式:READ IN[1], IN[2], IN[3], ...•IN[1], IN[2], IN[3]:外部设备的输入信号编号。
WRITEWRITE指令用于写入外部设备的输出信号值。
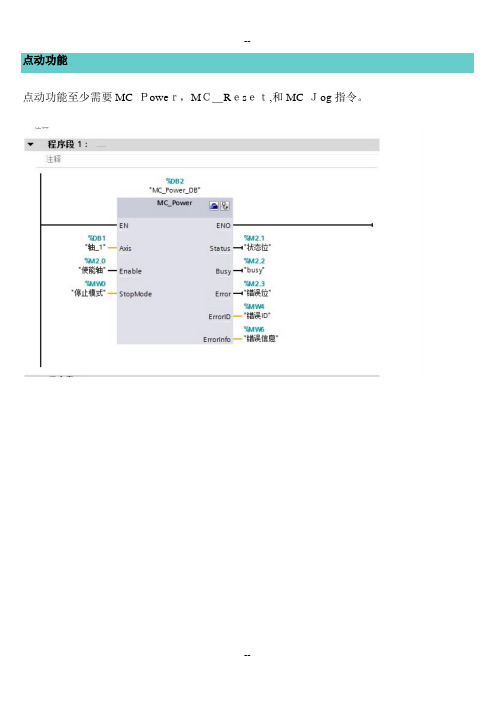
运动控制常见功能所用编程指令
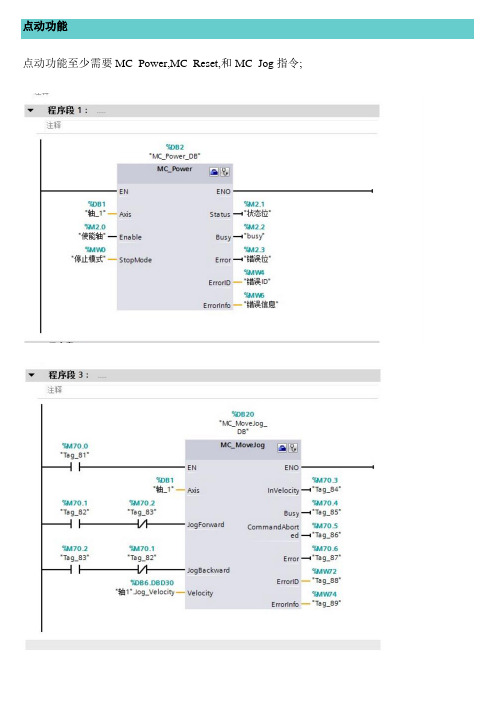
点动功能点动功能至少需要MC_Power,MC_Reset,和MC_Jog指令;相对距离运行相对速度控制功能,需要MC_Power,MC_Reset,和MC_MoveRelative指令;以速度连续运行相对速度控制功能,需要MC_Power,MC_Reset,和MC_MoveVolcity,以及MC_Halt指令; 启用/禁用工艺对象:MC_Power确认报警.重新启动工艺对象Mc_rest相对定位轴:Mc_MoveVelocity暂停轴:MC_haltS7-1200运动控制指令用户组态轴的参数,通过控制面板调试成功后,就可以开始根据工艺要求编写控制程序了;关于运动控制指令有几点需要说明:1. 打开OB1块,在Portal软件右侧“指令”中的“工艺”中找到“运动控制”指令文件夹,展开“S7-1200 Motion Control”可以看到所有的S7-1200 运动控制指令;可以使用拖拽或是双击的方式在程序段中插入运动指令,如下图所示,以MC_Power指令为例,用拖拽方式说明如何添加Motion Control指令;这些Motion Control指令插入到程序中时需要背景数据块,如下图所示,可以选择手动或是自动生成DB块的编号;添加好背景DB后的MC_Power指令如下图所示;『注意』运动控制指令之间不能使用相同的背景DB,最方便的操作方式就是在插入指令时让Portal软件自动分配背景DB块;2. 运动控制指令的背景DB块在“项目树”-->“程序块” --> “系统块”-->“程序资源”中找到;用户在调试时可以直接监控该DB块中的数值,如下图所示;3. 每个轴的工艺对象都一个背景DB块,用户可以通过下面的方式打开这个背景DB块:可以对DB块中的数值进行监控或是读写;以实时读取“轴_1”的当前位置为例,如下图所示,轴_1 的DB块号为DB1,用户可以在OB1 调用MOVE指令,在MOVE指令的IN端输入:,则Portal软件会自动把更新成:“轴_1”.Position;用户可以在人机界面上实时显示该轴的实际位置;。
ABB机器人程序指令详解

[\Off]: 默认轴配置数据。
( switch )
直线运动时,机器人移动至 ModPos 点,
轴配置数据默认为当前最接近值。
2020/3/
运动控制指令-ConfL
应用: 对机器人运行姿态进行限制与调整,程序运 行时,使机器人运行姿态得到控制。系统默 认值为 ConfL\On; 。
实例:
ConfL\On; … ConfL\Off;
p10,外轴不动。
p20,外轴联动 track_motion。
p30,外轴联动 orbit_a。
限制: 不能在指令 StorePath …RestoPath 内使用。 不能在预置程序 RESTART 内使用。
2020/3/
计数指令
Add Incr
Clear Decr
2020/3/
计数指令-Add
2020/3/
运动控制指令-SoftAct
SoftAct [\MechUnit,] Axis, Softness [\Ramp];
[\MechUnit]: Axis: Softness: [\Ramp]:
软化外轴名称。 ( mecunit )
软化转轴号码。 ( num )
软化值 %。
( num )
2020/3/
运动控制指令-PathResol
限制: 机器人必须在完全停止后才能更改路径控制
值,否则,机器人将默认一个停止点,并且 显示错误信息 50146。 机器人正在更改路径控制值时,机器人被强 制停止运行,机器人将不能立刻恢复正常运 行 ( Restart )。 以下情况机器人将自动恢复默认值 100%。 机器人冷启动。 系统载入新的程序。 程序重置 ( Start From Beginning )。
第八部分:ABB机器人运动控制常用指令
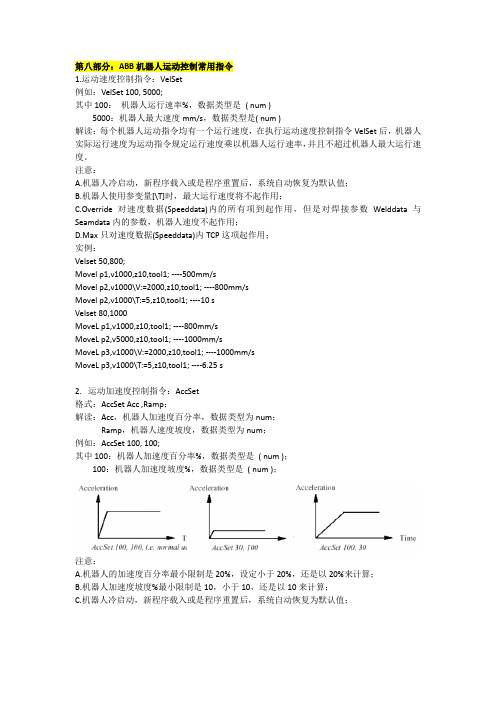
第八部分:ABB机器人运动控制常用指令1.运动速度控制指令:VelSet例如:VelSet 100, 5000;其中100:机器人运行速率%,数据类型是( num )5000:机器人最大速度mm/s,数据类型是( num )解读:每个机器人运动指令均有一个运行速度,在执行运动速度控制指令VelSet后,机器人实际运行速度为运动指令规定运行速度乘以机器人运行速率,并且不超过机器人最大运行速度。
注意:A.机器人冷启动,新程序载入或是程序重置后,系统自动恢复为默认值;B.机器人使用参变量[\T]时,最大运行速度将不起作用;C.Override对速度数据(Speeddata)内的所有项到起作用,但是对焊接参数Welddata与Seamdata内的参数,机器人速度不起作用;D.Max只对速度数据(Speeddata)内TCP这项起作用;实例:Velset 50,800;Movel p1,v1000,z10,tool1; ----500mm/sMovel p2,v1000\V:=2000,z10,tool1; ----800mm/sMovel p2,v1000\T:=5,z10,tool1; ----10 sVelset 80,1000MoveL p1,v1000,z10,tool1; ----800mm/sMoveL p2,v5000,z10,tool1; ----1000mm/sMoveL p3,v1000\V:=2000,z10,tool1; ----1000mm/sMoveL p3,v1000\T:=5,z10,tool1; ----6.25 s2.运动加速度控制指令:AccSet格式:AccSet Acc ,Ramp;解读:Acc,机器人加速度百分率,数据类型为num;Ramp,机器人速度坡度,数据类型为num;例如:AccSet 100, 100;其中100:机器人加速度百分率%,数据类型是( num );100:机器人加速度坡度%,数据类型是( num );注意:A.机器人的加速度百分率最小限制是20%,设定小于20%,还是以20%来计算;B.机器人加速度坡度%最小限制是10,小于10,还是以10来计算;C.机器人冷启动,新程序载入或是程序重置后,系统自动恢复为默认值;。
运动控制指令介绍
运动及轴命令ACC类型:轴指令语法: ACC(rate)注意:这个指令用来和旧的Trio控制器兼容。
在新控制程序中加速度率和减速度率可用ACCEL 和DECEL轴参数设定。
说明:同时设定加速度率和减速度率参数:rate:加速率,单位:UNITS/SEC/SEC例子:例1:把轴的加、减速设置成相同的值,在指定的速度下,运行电机ACC(120) ‘ 加减速同时设为 120 units/sec/secSPEED=14.5 ‘ 电机速度设为 14.5 units/secMOVE(200) ‘ 电机走 200个units的增量距离ADD_DAC类型:轴指令语法: ADD_DAC(轴)说明: ADD_DAC指令提供双反馈控制。
允许一个辅助编码器(轴2)反馈到伺服轴(轴1)。
指令使得两个伺服环的输出共同决定伺服轴的速度指令输出。
这个指令通常应用于轧辊反馈系统,需要一个辅助编码器补偿滑动。
当一个运动轴,带两个反馈编码器时,用到这条指令。
实现方法:在虚拟轴上做动作,用ADDAX()或CONNECT()把此动作加到两个轴上,再用ADD_DAC把两个轴的速度指令输出加到同一轴上如果2个反馈装置分辨率的不同,必须注意两个轴所要求的目标位置不一样。
注:在下例中,需要设置辅助编码器轴的ATYPE为伺服轴。
使用ADD_DAC(-1)取消连接参数:轴速度参考输出到基本轴,设置-1取消连接,并返回正常操作。
参阅: AXIS,ADDAX,OUTLIMIT例1:BASE(1)‘使两轴编码器在相同的线性距离反馈回相同的计数ENCODER_RATIO(counts_per_mm2, counts_per_mm1)UNITS AXIS(1) = counts_per_mm1UNITS AXIS(2) = counts_per_mm1 ‘ 单位必须相同ADD_DAC(2) ' 把轴2 的DAC_OUT叠加到轴1上ADDAX(1) AXIS(2) ' 把轴1的轨迹加到轴2上‘到现在,两轴已经准备就绪MOVE(1200)WAIT IDLEADDAX类型:运动控制指令语法: ADDAX(轴号)说明: ADDAX指令将2个或多个的运动叠加形成较复杂的运动轨迹。
ABB机器人常用指令详解-中文(一)
ABB常用指令详解-中文(一)ABB常用指令详解-中文(一)本文档旨在介绍ABB常用指令的详细信息,以帮助用户更好地了解和使用ABB系统。
下面将对各个章节进行详细阐述。
1.运动控制指令1.1.MOVEJ指令MOVEJ指令用于将关节直线移动到目标位置。
可以通过设置目标位置、运动速度和加速度来实现精确的运动控制。
该指令的语法如下:MOVEJ {目标位置},v{速度},a{加速度}其中,目标位置可以用关节角度或者工具坐标系位置进行表示。
1.2.MOVEL指令MOVEL指令用于将工具坐标系下的TCP(工具中心点)位置沿直线移动到目标位置。
通过设置目标位置、运动速度和加速度参数,可以实现精确的运动控制。
该指令的语法如下:MOVEL {目标位置},v{速度},a{加速度}其中,目标位置可以用工具坐标系下的坐标进行表示。
1.3.MOVEC指令MOVEC指令用于沿一条圆弧轨迹将点A移动到点B。
可通过设置起始点和终点的TCP位置,沿圆弧轨迹实现精确的运动控制。
该指令的语法如下:MOVEC {起始点TCP位置},{终点TCP位置},v{速度},a{加速度}2.系统控制指令2.1.SPEED指令SPEED指令用于设置运动的速度和加速度参数。
可以通过设置关节速度、坐标系速度和时间倍率三个参数来控制的运动速度。
该指令语法如下:SPEED v{速度},a{加速度},t{时间倍率}2.2.SETDO指令SETDO指令用于设置数字输出口的状态。
可以通过该指令将数字输出口的状态设置为高(1)或低(0)。
该指令的语法如下:SETDO x{数字输出口号},{状态}2.3.SETTOOL指令SETTOOL指令用于设置工具坐标系。
可以通过该指令将工具坐标系的原点和方向设置为指定的TCP位置。
该指令的语法如下:SETTOOL p{x},{y},{z},{q0},{q1},{q2},{q3}3.数据处理指令3.1.WT指令WT指令用于暂停程序的执行,直到满足指定的条件。
两轴运动控制器指令说明
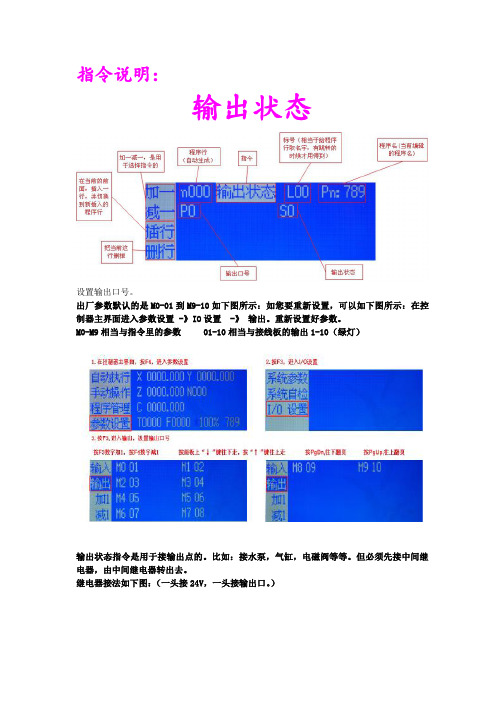
指令说明:输出状态设置输出口号。
出厂参数默认的是M0-01到M9-10如下图所示:如您要重新设置,可以如下图所示:在控制器主界面进入参数设置-》IO设置-》输出。
重新设置好参数。
M0-M9相当与指令里的参数01-10相当与接线板的输出1-10(绿灯)输出状态指令是用于接输出点的。
比如:接水泵,气缸,电磁阀等等。
但必须先接中间继电器,由中间继电器转出去。
继电器接法如下图:(一头接24V,一头接输出口。
)参数:P(输出口号),S(输出状态)取值范围:P(0-9),S(0:关,1:开)(特殊指令)输入控制输出在参数设置画面下(主画面进入“参数设置”),按“空格”键进入此设置。
显示“入00态00出00态00类00”共四行。
入:指输入口号(1-10)态:指相应的输入口为0/1时有效出:批输出态号(0-9),对应于M0-M9态:指相应的输出态为0/1类:0:电平状态:相应的输入口与其态相符时使输出态置为相应的输出状态1:脉冲方式:相应的输入口触发一次使输出态置为相应的输出状态注:输入口为零时无效最多可设置四个延时等待延时相应时间。
时间单位0.1/0.01秒参数:T(延时的时间)。
取值范围:(0-99999)当T为0时执行暂停功能,暂停后按面板上的启动键继续。
时间单位:0.1秒默认的是0.1秒,如需时间更精确的话,在控制器界面进入参数设置-》系统参数-》选项(0.01秒)如下图时间单位:0.01秒直线插补沿直线,以F速度×速度倍率,运动给定的增量值。
此运动受速度倍率的影响,且与当前F速度有关。
参数:X,Y,Z,C(向运动增量)F(运动速度,如F速度为0,默认速度300,数值越大速度越高)注:F为0,受上直线插补、测位运动、圆弧指令速度的影响参数:P(输入口号)S(输入口状态)取值范围:P(1-10)S(0,1)P参数(非0)选择的输入口S状态为(0/1)时等待。
(用与常开、常闭)常开常闭接法:(三线传感器:一头接输入点,另外两头分别接24V,24G)(二线传感器:一头接输入点,另外一头接24G)当P为0,S为1时,执行无限运动。
7-6 S7-1200 PLC运动控制的指令解读

1. MC_Power使能指令
轴在运动之前,必须运行使能指令,且一直处于激活状态,此指令是运动控制时, 必须要使用的指令。
LAD
输入/输出
参数的含义
EN
使能
Axis
已配置好的工艺对象名称,是一个数据块
StopMode 轴停止模式,有三种模式
Enable
为1时,轴使能;为0时,轴停止(不是上升沿)
Busy
标记MC_Powe指令是否处于活动状态
Error
标记MC_Power指令是否产生错误
ErrorID 错误ID码
ErrorInfo 错误信息
2.MC_MoveRelative相对定位轴指令
相对定位轴指令
MC_MoveRelative相对定位轴指令块的执行不需要建立参考点,只需要定义距离、 速度和方向即可。当上升沿使能Execute后,轴按照设定的速度和距离运行,其方向由 距离中的正负号(+/-)决定。以当前停止的位置作为起点,指定移动方向和移动量(相 对地址)进行定位动作。与参考点(参考点)无关。
3. MC_MoveAbsolute绝对定位轴指令
LAD
输入/输出
参数的含义
EN
使能
Axis
已配置好的工艺对象名称,是一个数据块
Execute
上升沿使能
Position
绝对目标位置
Velocity
定义的速度 要求为启动/停止速度 ≤ Velocity ≤ 最大速度
Doห้องสมุดไป่ตู้e
1:已达到目标位置
Busy
1:正在执行任务
CommandAborted 1:任务在执行期间被另一任务中止
1500运动控制常见功能所用编程指令
点动功能点动功能至少需要MC_Power,MC_Reset,和MC_Jog指令。
相对距离运行相对速度控制功能,需要MC_Power,MC_Reset,和MC_MoveRelative指令。
以速度连续运行相对速度控制功能,需要MC_Power,MC_Reset,和MC_MoveVolcity,以及MC_Halt 指令。
启用/禁用工艺对象:MC_Power确认报警.重新启动工艺对象Mc_rest相对定位轴:Mc_MoveVelocity暂停轴:MC_haltS7-1200运动控制指令用户组态轴的参数,通过控制面板调试成功后,就可以开始根据工艺要求编写控制程序了。
关于运动控制指令有几点需要说明:1. 打开OB1块,在Portal软件右侧“指令”中的“工艺”中找到“运动控制”指令文件夹,展开“S7-1200 MotionControl”可以看到所有的S7-1200运动控制指令。
可以使用拖拽或是双击的方式在程序段中插入运动指令,如下图所示,以MC_Power指令为例,用拖拽方式说明如何添加Motion Control指令。
这些Motion Control指令插入到程序中时需要背景数据块,如下图所示,可以选择手动或是自动生成DB块的编号。
添加好背景DB后的MC_Power指令如下图所示。
『注意』运动控制指令之间不能使用相同的背景DB,最方便的操作方式就是在插入指令时让Portal软件自动分配背景DB块。
2. 运动控制指令的背景DB块在“项目树”-->“程序块”--> “系统块”-->“程序资源”中找到。
用户在调试时可以直接监控该DB块中的数值,如下图所示。
3. 每个轴的工艺对象都一个背景DB块,用户可以通过下面的方式打开这个背景DB块:可以对DB块中的数值进行监控或是读写。
以实时读取“轴_1”的当前位置为例,如下图所示,轴_1的DB块号为DB1,用户可以在OB1调用MOVE指令,在MOVE指令的IN端输入:DB1.Position,则Portal软件会自动把DB1.Position更新成:“轴_1”.Position。
1200运动控制指令

1200运动控制指令1.引言1.1 概述概述部分:运动控制指令是一种用于控制运动系统的命令集合,它们能够指导运动控制器执行特定的动作和运动任务。
近年来,随着信息技术的快速发展和自动化需求的增加,运动控制技术在工业生产、机器人控制、航天航空等领域中得到了广泛应用。
运动控制指令包括各种运动参数、目标位置和速度等控制信息,通过与运动控制器交互,将这些指令传达给执行器或伺服系统,从而实现精确的运动控制和定位。
这些指令可以用于控制各种类型的运动,如直线运动、旋转运动、加减速过程、多轴协同运动等。
在工业生产中,运动控制指令被广泛应用于生产线的自动化控制中。
通过编写和发送控制指令,可以实现机器人的准确定位、高速运动以及复杂路径规划等功能,从而提高生产效率和生产质量。
在机器人控制领域,运动控制指令是实现机器人各种动作和任务的基础。
通过编写和发送指令,可以精确控制机器人的关节运动、末端执行器的姿态和位置等,实现机器人的灵活操作和高效工作。
航天航空领域对于运动控制的要求尤为严格和复杂。
运动控制指令在导航、姿态控制、轨迹规划等方面起着关键作用。
航天器、飞机等飞行器的控制精度和实时性要求较高,因此需要设计和应用高性能的运动控制指令,确保飞行器的安全和稳定。
本文将详细介绍1200种运动控制指令的功能和应用场景,以及它们在不同领域中的作用和优势。
通过了解和学习这些指令,读者可以更好地理解运动控制技术的原理和应用,为实际工程项目的运动控制设计和开发提供参考和借鉴。
同时,本文还将展望未来运动控制指令发展的趋势和前景,为读者了解未来运动控制技术的发展方向提供一定的参考。
1.2文章结构文章结构部分主要是对整篇文章的组织结构进行介绍和解释。
本文的结构可以分为引言、正文和结论三个主要部分。
在引言部分,我们首先概述了本文的主题——"1200运动控制指令",指出了本文所要探讨的内容,即关于运动控制指令的相关知识。
接着介绍了文章的结构和组织方式,以让读者对整篇文章有一个整体的把握。
ABB机器人标准指令详解
500 mm/s 800 mm/s 10 s
800 mm/s 1000 mm/s 1000 mm/s 6.25 s
2023/10/21
运动控制指令-VelSet
限制: 机器人冷启动,新程序载入与程序重置后,
系统自动设置为默认值。 机器人运动使用参变量 [\T] 时,最大运行速
度将不起作用。 Override 对速度数据 (speeddata) 内所有项
在一个数字数据值上增加 1,可以用赋值指 令替代,一般用于产量计数。
实例:
Incr reg1;
等同于
reg1:=reg1+1;
2023/10/21
计数指令-Decr
Decr Name;
Name: 数据名称。
实例:
ConfJ\On; … ConfJ\Off;
限制: 机器人冷启动,新程序载入与程序重置后,
系统自动设置为默认值。
2023/10/21
运动控制指令-ConfL
ConfL [\On]|[\Off];
[\On]: 启用轴配置数据。
( switch )
直线运动时,机器人移动至绝对 ModPos
点,如果无法到达,程序将停止运行。
2023/10/21
运动控制指令-SingArea
限制: 以下情况机器人将自动恢复默认值
SingArea\Off。 机器人冷启动。 系统载入新的程序。 程序重置 ( Start From Beginning )。
2023/10/21
运动控制指令-PathResol
PathResol PathSampleTime;
p10,外轴不动。
p20,外轴联动 track_motion。
p30,外轴联动 orbit_a。
movel运动指令的主要参数
movel运动指令的主要参数【原创版】目录一、MoveJ 运动指令二、Movel 运动指令三、MoveC 运动指令四、MoveAbsj 运动指令五、应用范围及特点总结正文在这篇文章中,我们将详细介绍四个运动指令:MoveJ、Movel、MoveC 和 MoveAbsj。
这四个指令在动画制作和编程中都有广泛应用,它们分别具有不同的特点和应用范围。
一、MoveJ 运动指令MoveJ 是一种关节运动指令,用于控制角色的关节进行弯曲和伸展。
它的主要参数包括关节名称、关节角度和关节方向。
在动画制作中,MoveJ 指令可以用于制作复杂的动作,如跳跃、跑步和攀爬等。
在编程中,MoveJ 指令可以用于控制机器人的关节运动,实现各种功能。
二、Movel 运动指令Movel 是一种线性运动指令,用于控制角色的直线运动。
它的主要参数包括目标位置、运动速度和运动方向。
在动画制作中,Movel 指令可以用于制作角色的平移、滑动和滚动等动画。
在编程中,Movel 指令可以用于控制机器人的直线运动,如移动和跟踪目标等。
三、MoveC 运动指令MoveC 是一种圆周运动指令,用于控制角色的圆周运动。
它的主要参数包括圆心位置、半径和运动方向。
在动画制作中,MoveC 指令可以用于制作角色的旋转、扭动和摆动等动画。
在编程中,MoveC 指令可以用于控制机器人的圆周运动,如旋转和扫描等。
四、MoveAbsj 运动指令MoveAbsj 是一种绝对关节运动指令,用于控制角色的关节进行绝对角度的弯曲和伸展。
它的主要参数包括关节名称、关节角度和关节方向。
在动画制作中,MoveAbsj 指令可以用于制作角色的特殊动作,如瞬间爆发力和夸张的动作等。
在编程中,MoveAbsj 指令可以用于控制机器人的关节运动,实现各种功能。
总结这四个运动指令,它们在不同领域有着各自的特点和应用范围。
在动画制作中,MoveJ、Movel 和 MoveC 指令可以用于制作复杂的角色动画,而 MoveAbsj 指令则可以用于制作特殊的动作效果。
运动控制指令
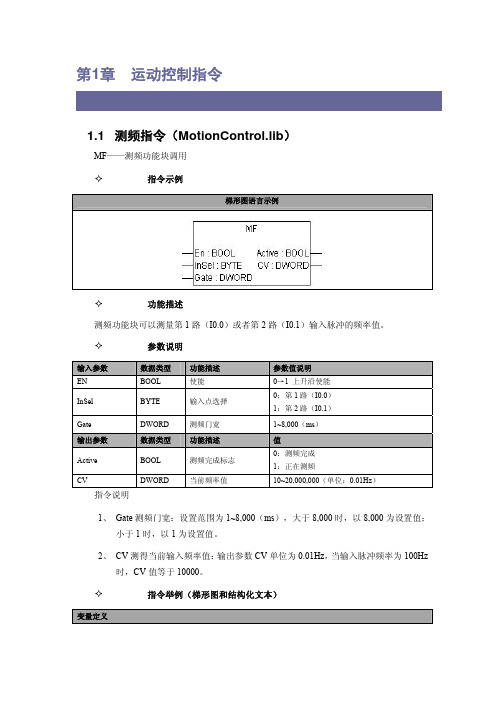
第1章 运动控制指令1.1 测频指令(MotionControl.lib )MF ——测频功能块调用指令示例梯形图语言示例功能描述测频功能块可以测量第1路(I0.0)或者第2路(I0.1)输入脉冲的频率值。
参数说明输入参数数据类型功能描述参数值说明 EN BOOL 使能 0→1 上升沿使能 InSel BYTE 输入点选择0:第1路(I0.0) 1:第2路(I0.1)Gate DWORD 测频门宽 1~8,000(ms ) 输出参数数据类型功能描述值Active BOOL 测频完成标志0:测频完成 1:正在测频CV DWORD 当前频率值 10~20,000,000(单位:0.01Hz )指令说明1、 Gate 测频门宽:设置范围为1~8,000(ms ),大于8,000时,以8,000为设置值;小于1时,以1为设置值。
2、 CV 测得当前输入频率值:输出参数CV 单位为0.01Hz ,当输入脉冲频率为100Hz时,CV 值等于10000。
指令举例(梯形图和结构化文本)变量定义编程语言程序梯形图(LD)结构化文本(ST)程序说明:¾En由False变为True并保持时,I0.0通道接收脉冲,测频指令测量当前输入脉冲的频率,dwCV显示当前接收到脉冲的频率,Active等于1并保持。
¾En由True变为False时,Active等于0,dwCV等于0。
1.2 高速计数指令(MotionControl.lib)COUNT——高速计数功能块调用指令示例梯形图语言示例功能描述高速计数功能块可以实现A、B相计数和单相计数,可选择为增计数或者减计数,计数值达到设定值后可以选择是否启动中断。
在A、B相计数时,可接收90º±60º范围的相差。
计数值范围要求在-2147483648~2147483647。
参数说明输入参数数据类型功能描述参数值说明EN BOOL 使能 0→1 上升沿使能 Clr BOOL 清零0→1 上升沿使能InSel BYTE 输入点选择0:第1路(I0.0)单相计数,计数方向对应I0.41:第2路(I0.1)单相计数,计数方向对应I0.52:第3路(I0.2)单相计数,计数方向对应I0.63:第4路(I0.3)单相计数,计数方向对应I0.74:第1路(A相I0.0和B 相I0.1)双相计数 5:第2路(A 相I0.2和B 相I0.3)双相计数Mode BYTE 倍频模式 单相计数可为1和2,双相计数可为1、2和4PV DINT 设定计数值-2147483648~2147483647UpDn BYTE 计数方向控制 双相计数设置该项无效,单相计数设置该项有效。
运动控制向导的配置和运动控制指令的使用方法
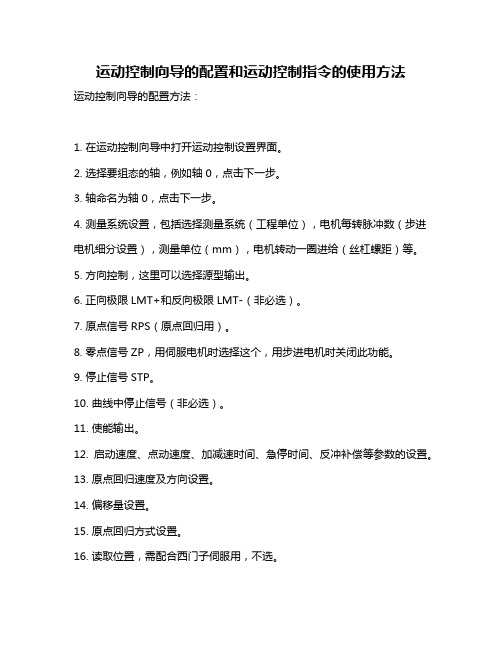
运动控制向导的配置和运动控制指令的使用方法运动控制向导的配置方法:1. 在运动控制向导中打开运动控制设置界面。
2. 选择要组态的轴,例如轴0,点击下一步。
3. 轴命名为轴0,点击下一步。
4. 测量系统设置,包括选择测量系统(工程单位),电机每转脉冲数(步进电机细分设置),测量单位(mm),电机转动一圈进给(丝杠螺距)等。
5. 方向控制,这里可以选择源型输出。
6. 正向极限LMT+和反向极限LMT-(非必选)。
7. 原点信号RPS(原点回归用)。
8. 零点信号ZP,用伺服电机时选择这个,用步进电机时关闭此功能。
9. 停止信号STP。
10. 曲线中停止信号(非必选)。
11. 使能输出。
12. 启动速度、点动速度、加减速时间、急停时间、反冲补偿等参数的设置。
13. 原点回归速度及方向设置。
14. 偏移量设置。
15. 原点回归方式设置。
16. 读取位置,需配合西门子伺服用,不选。
17. 曲线,这里可以添加自定义的运动轨迹。
18. 存储区为系统存储上面参数的地址,注意不要和其它地址冲突,这里选择VD1000开始。
19. 自动生成的了函数,可以根据需要进行选择,这里全选。
20. IO映设表,前面选择的IO点。
21. 最后一页,选择完成。
运动控制指令的使用方法:运动控制指令的使用需遵循一些准则:必须确保在同一时间仅有一条运动指令激活。
可在中断例程中执行AXISx_RUN和AXISx_GOTO。
但是,如果运动轴正在处理另一命令时,不要尝试在中断例程中启动指令。
如果在使用中断程序中启动指令,则可使用AXISx_CTRL指令的输出来监视运动轴是否完成移动。
对于脉冲,这些参数为DINT值。
有些特定位置控制任务需要以下运动指令:要在每次扫描时执行指令,请在程序中插入AXISx_CTRL指令并使用触点。
要指定运动到绝对位置,必须首先使用AXISx_RSEEK或AXISx_LDPOS指令建立零位置。
要根据程序输入移动到特定位置,请使用AXISx_GOTO指令。
ABB机器人高级编程指令
運動控制指令-ConfJ
應用﹕ 對機器人運行姿態進行限製與調整﹐程序運行 時﹐使機器人運行姿態得到控制﹐系統默認值 為﹕ConfJ\On;
實例﹕ ConfJ\On; ….. ConfJ\Off;
限製﹕ 機器人冷啟動﹐新程序載入與程序重置後﹐系統
自動設置為默認值
2023/12/29
2023/12/29
運動控制指令-PathResol
限製﹕ 機器人必須在完全停止後才能更改路徑控制值﹐
否則﹐機器人將默認一個停止點﹐并且顯示錯誤 信息50146﹔ 機器人在更改路徑控制值時﹐機器人被強製停止 運行﹐機器人將不能立刻恢復正常運行(Restart) 以下情況機器人將自動恢復默認值100% -機器人冷啟動 -系統載入新的程序 -程序重置(Start From Beginning)
2023/12/29
運動控制指令-SoftAct
SoftAct[\MechUnit],Axis,Softness[\Ramp]
[\MechUnit]﹕ 軟化外軸名稱 (mechunit)
Axis:
軟化外軸號碼 (num)
Softness:
軟化值%
(num)
[\Ramp]:
軟化坡度%
(num)
應用﹕
2023/12/29
运动控制指令-AccSet
实例﹕
acceleration
acceleration
acceleration
AccSet 100,100﹐i.e.normal
限制﹕
AccSet 30,100
AccSet 100,30
Time
机器人加速度百分率最小值为20﹐小于20﹐以20 计﹐机器人加速度坡度最小值为10﹐小于10以10 计﹔
ABB全部编程指令详解
ABB全部编程指令详解ABB编程指令是ABB机器人控制系统的一部分,它是指示机器人执行特定操作的指令集。
ABB编程指令非常丰富,包括运动指令、逻辑指令、传感器指令等等。
下面我们将对ABB编程指令进行详细的介绍。
1. 运动指令ABB运动指令用于控制机器人的运动,包括直线运动、圆弧运动、旋转运动等等。
其中比较常见的运动指令包括:(1) MOVEJ:用于控制机器人进行关节运动,即指定机器人的每个关节移动到特定的位置。
(2) MOVEL:用于控制机器人进行直线运动,即指定机器人从当前位置移动到目标位置,并沿着一条直线路径到达目标位置。
(3) MOVEC:用于控制机器人进行圆弧运动,即指定机器人从当前位置移动到目标位置,并在目标位置旋转到指定的方向上。
(4) MOVER:用于控制机器人进行旋转运动,即指定机器人绕着某个轴旋转到特定的位置。
2. 逻辑指令ABB逻辑指令用于控制机器人的逻辑操作,包括条件判断、循环结构等等。
其中比较常见的逻辑指令包括:(1) IF-ELSE:用于进行条件判断操作,即如果某个条件成立,则执行特定的操作,否则执行另外的操作。
(2) WHILE-DO:用于进行循环结构操作,即指定某个操作重复执行直到满足某个条件。
(3) SWITCH-CASE:用于进行多分支判断操作,即如果某个条件成立,则执行对应的操作,否则执行默认操作。
3. 传感器指令ABB传感器指令用于控制机器人的感知操作,包括传感器读取、数据处理等等。
其中比较常见的传感器指令包括:(1) READ:用于读取传感器数据,即获取传感器传回的信息。
(2) FILTER:用于对传感器数据进行滤波操作,即去除噪声和干扰。
(3) CALC:用于对传感器数据进行计算操作,即对传感器数据进行处理,得出特定的结果。
4. 其他指令除了上述三类指令外,ABB编程指令还包括其他指令,比如:(1) WAIT:用于控制机器人等待一段时间,直到时间到达才继续执行下一个操作。
S7-1200运动控制指令-12

谢谢观看
运动控制指令
轴预设速度指令
轴按照设定的速度和方向运行,直到MC_Halt轴 停止指令使能。 如果设定“Velocity”数值为0.0,触发指令后轴会 以组态的减速度停止运行,相当于MC_Halt指令。
运动控制指令
轴点动指令
轴在 手动模式下点动运行指令块,在正向点动置1 后,轴以设定的速度运行,直到正向点动为置0, 轴运行停止,反转同理。 正向点动和反向点动不能同时触发,在执行点动指 令时,用互锁逻辑。
ቤተ መጻሕፍቲ ባይዱ动控制指令
启动/禁用轴指令
功能:使能轴或禁用轴。 使用要点:在程序里一直调用,并且在其他运动 控制指令之前调用并使能。 当Enable值1后,轴使能。
运动控制指令
轴故障确认指令
用来确认“轴运行和轴停止出现的运行错误”和“组 态错误”。必须调用复位指令块进行复位,Execute 用上升沿触发。
运动控制指令
S7-1200运动控制指令
运动控制指令
指令综述
序号
1 2 3 4 5 6 7 8
指令名称
MC_Power MC_Reset MC_Home MC_Halt MC_MoveAbsolute MC_MoveRelative MC_MoveVelocity MC_MoveJog
功能
轴启用、禁用 轴错误确认、复位 设置轴回参考点 轴停止 轴的绝对定位 轴的相对定位 轴以预设的速度运动 轴在手动模式下点动
运动控制指令
轴绝对定位指令
它的执行需要建立参考点,通过定义速度、距离和方 向,当上升沿使能Execute后,按照设定的速度和方 向运行到定义好的绝对位置处。 使能绝对位置指令之前,轴必须回原点,因此 MC_MoveAbsolute指令之前必须有MC_Home指令。
运动控制指令2-4,5,6,7,8
5 刀具半径补偿C指令
B刀补----尖角用圆弧过渡 C刀补----尖角用折线过渡
偏移矢量
取消刀补
建立刀补
6.拐角圆弧插补指令 G39:
N1 Y10.0 N2 G39; N3 X-10;
N1 0,10
偏移矢量 N2
编程轨迹
X N3
Y 刀具中心轨迹
-10,10
%0100
G92 X0 Y0 Z0;设定绝对坐标系,刀具位于开始位置(X0,Y0,Z0);
数控装置能使刀具中心从零件实际轮廓上偏离 一个指定的刀具半径值(补偿值)并使刀具中 心在这一被补偿的轨迹上运动,从而把工件加 工成图纸上要求的轮廓形状。
2、刀具半径补偿的过程
分为三步:
1、刀补的建立:在刀具从起点 接近工件时,刀心轨迹从与编 程轨迹重合过度到与编程轨迹 偏离一个偏置量的过程。
具
前 进
前
方
进 方 向
在前进方向 右侧补偿
向
补偿量
顺铣
(a) 刀具补偿方向
(a)左刀补 (b)右刀补
(b) 逆铣
(2)、在进行刀径补偿前,必须用G17或G18、G19指定 刀径补偿是在哪个平面上进行。平面选择的切换必须在补 偿取消的方式下进行,否则将产生报警。
(3)、刀补的引入和取消要求应在G00或G01程序段 , 不要在G02/G03程序段上进行。
G43 Z-- H--- ; G44
Z– 程序给定的坐标值
H– 刀具长度补偿值寄存器的地址码, 该寄存器中存放着补偿值。
三 刀具补偿指令:
3、刀具位置偏移指令(G45~48):
G45 IP- D - ; 增加一个刀具偏移量的移动距离 G46 IP- D - ; 减少一个刀具偏移量的移动距离 G47 IP- D - ; 增加二个刀具偏移量的移动距离 G48 IP- D - ; 减少二个刀具偏移量的移动距离 P30图2.2.8
S7-200Smart运动控制指令讲解
S7-200Smart运动控制指令讲解S7-200Smart是西门子的一款小型PLC,价格便宜,功能强大,从而爱到大家的喜爱,今天给大家讲解一下运动控制方面的设置,直接上干货:PS:小编这里用的软件版本为2.4一、运动控制向导设置如下1、在运动控制向导中打开运动控制设置界面2、选择要组态的轴,这里选择轴0,点击下一步3、轴命名为轴0,点击下一步4、测量系统设置,分别为选择测量系统:工程单位电机每转脉冲数:800(步进电机细分设置)测量单位:mm电机转动一圈进给(丝杠螺距):5.05、方向控制,这里是源型输出6、正向极限LMT+(非必选)7、反向极限LMT-(非必选)8、原点信号RPS(原点回归用)9、零点信号ZP,用伺服电机时选择这个,用步进电机时关闭此功能10、停止信号STP11、曲线中停止信号(非必选)12、使能输出13、启动速度14、点动速度15、加减速时间16、急停时间17、反冲补偿18、参考点功能(回原点用,必选)19、原点回归速度及方向设置20、偏移量设置21、原点回归方式设置,其中3、4项需要ZP点,需伺服电机用,这里我们选122、读取位置,需配合西门子伺服用,不选23、曲线,这里可以添加自定义的运动轨迹24、存储区为系统存储上面参数的地址,注意不要和其它地址冲突,这里选择VD1000开始25、自动生成的了函数,可以根据需要进行选择,这里全选26、IO映设表,前面选择的IO点27、最后一页,选择完成二、设置完成后,了例程中出现如下例程,这里就可以直接调用了。
三、刚才生成的子例程的功能如下,我们逐一进行讲解1、AXISx_CTRL 子例程(控制)启用和初始化运动轴,方法是自动命令运动轴每次 CPU 更改为 RUN 模式时加载组态/曲线表。
在您的项目中只对每条运动轴使用此子例程一次,并确保程序会在每次扫描时调用此子例程。
使用SM0.0(始终开启)作为EN 参数的输入。
2、AXISx_MAN 子例程(手动模式)将运动轴置为手动模式。
欧姆龙movefeed指令
欧姆龙movefeed指令
欧姆龙(Omron)是一家知名的自动化控制设备制造商,其产品广泛应用于各种工业自动化领域。
在欧姆龙的自动化控制系统中,MOVEFEED指令是一种常用的运动控制指令,用于控制机器或设备的运动轨迹。
MOVEFEED指令的基本作用是控制轴的运动,包括直线和圆弧插补等。
通过使用MOVEFEED 指令,可以精确地控制轴的位置、速度和加速度等参数,从而实现精确的运动控制。
使用MOVEFEED指令需要提供一系列参数,包括目标位置、速度、加速度、减速度等。
这些参数可以根据实际需求进行设置,以满足不同的运动控制要求。
在欧姆龙的自动化控制系统中,MOVEFEED指令通常与轴配置、驱动器设置等其他指令一起使用。
例如,在执行MOVEFEED指令之前,需要先配置轴的参数,如最大速度、最小速度、加速度等。
同时,还需要根据实际需求选择合适的驱动器和电机,以确保运动的平稳性和准确性。
除了MOVEFEED指令外,欧姆龙还提供了一系列其他运动控制指令,如SETPOS、SETSPEED 等。
这些指令可以单独使用,也可以组合使用,以实现更加复杂的运动控制需求。
总之,MOVEFEED指令是欧姆龙自动化控制系统中常用的运动控制指令之一。
通过合理使用该指令和其他相关指令,可以实现对机器或设备的精确运动控制,提高生产效率和产品质量。
在实际应用中,需要根据具体需求选择合适的参数和指令,并进行充分的测试和验证,以确保运动的准确性和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运动及轴命令ACC类型:轴指令语法: ACC(rate)注意:这个指令用来和旧的Trio控制器兼容。
在新控制程序中加速度率和减速度率可用ACCEL 和DECEL轴参数设定。
说明:同时设定加速度率和减速度率参数:rate:加速率,单位:UNITS/SEC/SEC例子:例1:把轴的加、减速设置成相同的值,在指定的速度下,运行电机ACC(120) ‘ 加减速同时设为 120 units/sec/secSPEED=14.5 ‘ 电机速度设为 14.5 units/secMOVE(200) ‘ 电机走 200个units的增量距离ADD_DAC类型:轴指令语法: ADD_DAC(轴)说明: ADD_DAC指令提供双反馈控制。
允许一个辅助编码器(轴2)反馈到伺服轴(轴1)。
指令使得两个伺服环的输出共同决定伺服轴的速度指令输出。
这个指令通常应用于轧辊反馈系统,需要一个辅助编码器补偿滑动。
当一个运动轴,带两个反馈编码器时,用到这条指令。
实现方法:在虚拟轴上做动作,用ADDAX()或CONNECT()把此动作加到两个轴上,再用ADD_DAC把两个轴的速度指令输出加到同一轴上如果2个反馈装置分辨率的不同,必须注意两个轴所要求的目标位置不一样。
注:在下例中,需要设置辅助编码器轴的ATYPE为伺服轴。
使用ADD_DAC(-1)取消连接参数:轴速度参考输出到基本轴,设置-1取消连接,并返回正常操作。
参阅: AXIS,ADDAX,OUTLIMIT例1:BASE(1)‘使两轴编码器在相同的线性距离反馈回相同的计数ENCODER_RATIO(counts_per_mm2, counts_per_mm1)UNITS AXIS(1) = counts_per_mm1UNITS AXIS(2) = counts_per_mm1 ‘ 单位必须相同ADD_DAC(2) ' 把轴2 的DAC_OUT叠加到轴1上ADDAX(1) AXIS(2) ' 把轴1的轨迹加到轴2上‘到现在,两轴已经准备就绪MOVE(1200)WAIT IDLEADDAX类型:运动控制指令语法: ADDAX(轴号)说明: ADDAX指令将2个或多个的运动叠加形成较复杂的运动轨迹。
ADDAX指令把指定轴的目标位置(DPOS)的变化,附加到指令指向的轴(基准轴)的任意运动上。
指定轴可以是任一轴,不一定在系统里物理存在。
ADDAX指令发出后两轴的链路保持连接。
直到断开。
指定轴上的进一步运动被附加到基准轴上。
使用ADDAX(-1)取消轴的连接。
ADDAX允许执行两轴叠加运动。
当带有编码器接口的伺服轴的轴参数SERVO 设置到OFF也就是开环,所测位置MPOS被复制到需求位置DPOS。
可以使用ADDAX统计编码器输入。
参数:轴号:指定轴注意:ADDAX指令在做运动叠加时,是在轴参数units下计算的。
例1UNITS AXIS(0)=1000UNITS AXIS(1)=20' 把轴1叠加到轴0ADDAX(1) AXIS(0)MOVE(1) AXIS(0)MOVE(2) AXIS(1)' 轴0将运动1*1000+2*20=1040个边沿例2 物体放置在连续运动的同步带上,并在不远处拾起。
传感器给出信息物体在需要位置之前还是之后,有多远的距离。
在以下例子中,轴0假设为基本轴并连续正向运动,叠加轴2依据子程序计算出的偏移运动到轴0。
FORWARD AXIS(0) ‘设置连续运动ADDAX(2) ‘叠加轴2的偏移运动到轴0REPEATGOSUB getoffset ‘计算偏移MOVE(offset) AXIS(2)在轴2上作偏移的运动UNITL IN(2)=ON ‘直到校正结束例3 有一个cambox运动,用一个编码器输入轴(可以是手轮)作主轴,其实现方法:用一个虚拟轴做主轴,执行cambox运动。
把编码器输入的脉冲输入加到这个虚拟轴上。
' 轴0执行凸轮运动,轴2做主轴' 轴1有一个编码输入子板' 轴2是虚拟轴SERVO AXIS(1)=OFFADDAX(1) AXIS(2) ’把编码器输入的脉冲输入加到这个虚拟轴上。
...CAMBOX(1000,1100,4,600,2) AXIS(0) ’ 轴0执行凸轮运动,轴2做主轴AXIS类型:修改指令语法: AXIS(轴号)说明: AXIS修改设置单轴运动指令或单轴参数读写。
AXIS参数在命令行或程序行特别有效。
注意:如果需要修改下面的所有指令的作用轴应该用BASE指令参数:轴号任何有效的BASIC表达式,指定轴号。
注意:AXIS指令可用于修改以下指令的轴参数:ADDAX,CAM,CAMBOX,CANCEL,CONNECT,DATUM,DEFPOS,FORWARD,MOVEABS,MOVECIRC,MOVELINK,MOVE,MOVEMODIFY,REVERSE,REGIST,WAIT IDLE,WAIT LOADED。
参阅: BASE()例子:例子1>> PRINT MPOS AXIS(3)例子2MOVE(300) AXIS(2)例子3REPDIST AXIS(3)=100注意:请注意上面例子中执行动作和参数读写时在写法上的区别。
BASE类型:运动控制指令语法: BASE(轴1,轴2,轴3)说明: BASE指令用于导向下一个运动指令轴的参数读/写入特定轴或轴组,设置的缺省值依次为:0,1,2…每一个过程有其自己的BASE基本轴组,每个程序能单独赋值。
Trio Basic 程序与控制轴运动的运动发生器分开。
每个轴的运动发生器有其独立的功能,因此每个轴能以自己的速度、加速度等进行编程,单独运动,同时运动,或者通过插补或链接运动链接在一起。
AXIS()命令只要应用正在进行的单命令可以重新导向不同的轴。
而BASE()指令,导向接下来的所有指令,除非用AXIS规定轴号参数:轴号:轴号或轴组号成为新的基准轴排列,即轴号或轴组发送运动指令给多轴指令里的第一个轴。
基本轴的轴数和顺序轴在轴组用于多轴运动。
例子:例子1BASE(1)UNITS=2000 ‘设置轴1的转换因子。
SPEED=100 ‘设置轴1的速度ACCEL=5000 ‘设置轴1的加速度BASE(2)UNITS=2000 ‘设置轴2 的转换因子SPEED=125 ‘设置轴2的速度ACCEL=10000 ‘设置轴2的加速度例子2BASE(0,4,6)MOVE(100,-23.1,1250)注意:轴0移动100单位,轴4移动-23.1单位,轴6移动1250单位。
这些轴会轴0的速度,加速度运动到特定位置。
注意:BASE指令为每一个过程设置一个内部轴队列。
默认值为:0,1,2一直到控制器上的最大轴号。
如果BASE没有指定所有轴,则自动把其他值填入。
首先填入的是比最后制定的轴号大的轴,然后按顺序填入其他轴:例子3在MC216控制器上设置16轴的基本排列。
BASE(2,6,10)设置16轴的内部排列2,6,10,11,12,13,14,15,0,1,3,4,5,7,8,9注意:在命令行处理过程中,通过输入>>BASE(0,2,3,1,4,5,6,7)>>例子是8轴控制器MC206CAM类型:轴指令语法: CAM (start point,End point,Table multiplier,distance)说明: CAM指令按存储在TABLE变量中数组的位置曲线来运动。
Table数组由TABLE指令定义。
Table值是相对于cam运动起始点的绝对位置,并特指编码器的边沿。
运动可由TABLE数组中3到数组容许的任意个点来定义。
运动控制器根据table里的运动曲线通过插补控制电机做出圆滑的运动。
参数: start pointTable数组中使用的第一个元素的地址。
允许Table数组保留多个轨迹或其它信息。
End pointTable数组中最后一个元素的地址。
注意:2个或2个以上CAM()指令同时执行时可以用数组中的相同一组值。
Table multiplierTable倍乘值用于成比例的放缩Table里存储的数值。
因为Table值特定为编码器的沿。
控制运动轨迹的幅值。
Distance用户定义的单位控制整个运动速度。
执行CAM依据当前轴的速度和距离。
控制频率例如:假定程序单位为mm同时速度设置成10mm/s,加速度足够高。
如果定义距离100mm,CAM的执行需要10秒。
速度可以由其他控制指令随时更改。
加速度为当前指定的ACCEL值。
注意为了跟随CAM轨迹,ACCEL参数必须比SPEED参数大1000倍。
(假设默认SERVO_PERID是1ms )参阅: ACCEL,AXIS,CAMBOX,SPEED,TABLE例子:假定运动需要遵循以下位置等式:T(x)=x*25+10000*(1-cos(x))上等式中,X是角度。
客户在利用这个例子时应注意上面的算式,在给table赋值时,cos(x)里的x要换算成弧度。
这个例子提供简单的常速摆动。
循环执行需要以下代码。
FOR deg=0 TO 360 STEP 20 ‘用来给table赋值的循环rad = deg * 2 * PI/360 ‘角度转化为弧度x = deg * 25 + 10000 * (1-COS(rad))TABLE(deg/20,x) ‘table赋值NEXT degWHILE IN(2)=ON ‘input 2 为on时,CAM循环CAM(0,18,1,200)WAIT IDLEWEND注:子程序camtable加载以下数据到table数组。
Table位置角度值1 0 02 20 11033 40 33404 60 65005 80 102636 100 142367 120 180008 140 211609 160 2339610 180 2450011 200 2439612 220 2316013 240 2100014 260 1823615 280 1526316 300 1250017 320 1034018 340 910319 360 9000注意:当CAM指令执行时,ENDMOVE参数设成上一运动的结束位置。
例2:电机上安转一个打印模版,上面有0到9十个数字,激光射到哪个数字,哪个数字就会被打印。
需要打印的数字来自PORT1,ASCII码。
编码器是4000个边沿每转,所以数字与数字之间是400。
Camtable从0到1,这样,cammultiplier应该是400的整数倍,这样才能保证在每个位置之间运动。
速度设为10000 边沿/s,每个cam运动周期设为固定0.25s,这样distance参数应该是10000*0.25=2500程序如下:GOSUB profile_genWHILE IN(2)=ONWAIT UNTIL KEY#1 '等待来自port1的数字GET#1,kIF k>47 AND k<58 THEN '是否有效position=(k-48)*400 '转化为绝对位置multiplier=position-offset '计算相对运动'检查反方向运动是否更近IF multiplier>2000 THENmultiplier=multiplier-4000ELSEIF multiplier<-2000 THENmultiplier=multiplier+4000ENDIFCAM(0,200,multiplier,2500) '做cam运动WAIT IDLEOP(15,ON) '触发激光WA(20)OP(15,OFF)offset=(k-48)*400 '计算当前位置ENDIFWENDprofile_gen:num_p=201scale=1.0FOR p=0 TO num_p-1TABLE(p,((-SIN(PI*2*p/num_p)/(PI*2))+p/num_p)*scale)NEXT pRETURNCAMBOX类型:运动控制指令语法:CAMBOX(start point, end point, table multiplier, link distance ,link axis<,link options><, link pos>)说明: CAMBOX指令按存储在TABLE变量中数组的位置曲线来运动。