一种可全方位移动的三轴转台结构设计
设计一个3工位旋转工作台的控制系统

任务书课题十二、设计一个3工位旋转工作台的控制系统1.动作特性其工作示意如图所示。
三个工位分别完成上料、钻孔和卸件。
工位1:上料器推进,料到位后退回等待。
工位2:将料夹紧后,钻头向下进给钻孔,下钻到位后退回,退回到位后,工件松开,放松完成后等待。
工位3:卸料器向前将加工完成的工件推出,推出到位后退回,退回到位后等待。
2.控制要求工位2工作台示意图1)用选择开关来决定控制系统的全自动、半自动运行和手动调整方式。
2)手动调整采用按钮点动的控制方式。
3)系统处于半自动工作方式时,每执行完成一个工作循环,用一个起动按钮来控制进入下一次循环。
4)系统处于全自动运行方式时,可实现自动往复地循环执行。
5)系统运动不很复杂,采用4台电机。
6)对于部分与顺序控制和工作循环过程无关的主令部件和控制部件,采用不进入PLC的方法以节省I/O点数。
7)由于点数不多,所以用中小型PLC可以实现。
3.时间安排第1-2天:根据设计任务查阅相关文献;第3-6天:选择一种合适的设计方法,制定详细的设计方案,设计出满足要求的电器控制系统并验证其正确性;第7-8天:编写课程设计报告;绘制相关电气图纸。
第9-10天:提交课程设计报告;进行课程设计答辩。
4.所需提交的材料1)编写输入输出对照表。
包括信号名称、外部元件号、内部继电器号2)绘制PLC外部接线图3)绘制功能流程图;4)编写、调试梯形图或语句表程序目录任务书 ........................................................................ 错误!未定义书签。
第1章课程设计任务说明 ...................................... 错误!未定义书签。
1.1 课题简介........................................................... 错误!未定义书签。
三轴转台结构介绍

三轴转台结构介绍三轴转台是一种用于控制运动方向和角度的机械装置。
它通常由三个相互垂直的轴组成,分别是水平轴、垂直轴和旋转轴。
三轴转台主要用于航空航天、军事、船舶、机器人等领域的精密定位和追踪操作。
水平轴是三轴转台的基本轴之一,也是最基础的运动轴。
它使转台能够在水平方向上进行平移运动,常用于改变转台的位置。
垂直轴是另一个基本轴,它使转台能够在垂直方向上进行上下运动。
通过控制垂直轴的运动,可以改变转台的高度。
旋转轴是最重要的轴,它使转台能够在水平面内进行旋转运动。
通过控制旋转轴的运动,可以改变转台的方向和角度。
三轴转台的结构设计要考虑到稳定性、精度和可靠性。
为了保证转台的稳定性,常采用重型结构和防震装置来减少外界干扰对转台运动的影响。
为了保证转台的精度,需要采用高精度的轴承和驱动装置,以及精密的控制系统。
为了保证转台的可靠性,需要采用可靠的传感器和执行器,并进行合理的维护和检修。
在航空航天领域,三轴转台广泛应用于卫星地面测试和发射场测试。
在卫星地面测试中,可以使用三轴转台模拟卫星在轨道上的运动,以验证卫星的姿态控制系统和传感器的性能。
在发射场测试中,可以使用三轴转台模拟发射过程中的运动情况,以验证发射车辆和卫星的适应性和可靠性。
在军事领域,三轴转台主要应用于导弹、雷达和光电设备的定位和追踪。
通过控制转台的运动,可以实现对目标的精确定位和持续追踪,提高军事系统的作战效能和战场信息获取能力。
在船舶领域,三轴转台主要应用于船舶导航系统和海洋观测设备的定位和导航。
通过控制转台的运动,可以实现对船舶航向和船首方向的控制,提高航行安全性和导航精度。
同时,通过安装观测设备,可以对海洋环境进行实时监测和数据采集。
在机器人领域,三轴转台主要应用于机器人的运动控制和视觉定位。
通过控制转台的运动,可以实现机器人在三维空间的精确定位和运动控制,提高机器人的运动灵活性和操作精度。
同时,通过安装相机和传感器,可以实现机器人的视觉感知和环境识别,提高机器人的自主导航和任务执行能力。
一种可全方位移动的三轴转台结构设计

一种可全方位移动的三轴转台结构设计摘要:本文介绍了一种适用于一些小型飞行器模拟测试的实验平台,按要求对其结构进行了设计,并制作了实验的样机。
该实验平台实现可以三个旋转自由度和地面的全方位移动,并且该平台不需要驱动元件,结构简便实用。
关键词:三轴转台;全方位移动;结构设计引言三维转台作为航空、航天研究中的关键地面设备是导航制导设备的关键,所以转台的技术研究一直受到发达国家航空航天领域的高度重视。
三轴转台是用于飞机,导弹,飞船等其他飞行器及地面半实物仿真的关键设备,它可在实验室环境内实时地模拟复现飞行器在空中的动力学特性和飞行器在空间进行中滚转、俯仰、偏航等的运动姿态,转台技术广泛应用于航空、航海、国防建设领域中。
目前,各国研究制作的转台都是带有驱动机构的大型控制转台,这些测试转台无论是机械结构还是测量控制系统都极其复杂,转台的制作使用成本昂贵,操作复杂;而且,这些平台大多是不可自由移动的。
这对于一些需要在地面自由移动的小型简易的实验飞行器和其他一些需要低成本半实物仿真的设备,显然是不适合。
而针对这种在地面自由移动,低成本,使用、操作方便的飞行器设备实验仿真测试平台。
本文提出一种新的可全方位移动的三轴转台设计。
1.结构设计1.1整体结构方案设计按照设计要求,本设计具体地说是一种可全方位移动的三轴转台,包括彼此转动连接的转动部分及移动平台,转动部分包括转杆、中环及外环,移动平台包括底座、支杆及万向轮,外环转动安装在底座上,底座上沿周向均布有多个支杆,每个支杆均连接有万向轮,通过万向轮实现水平方向前后、左右两个平移自由度;中环转动安装在外环内,转杆作为被测对象的载体转动安装在中环内,通过转杆相对于中环转动、中环相对于外环转动及外环相对底座转动实现三个旋转自由度,如图1所示。
图1 转台三维模型1.2转动部分结构设计转台的转动部分包括中间转杆、中环及外环,具体情况可以参照图1。
中环和外环采用的正八边形的形状。
三轴测试转台结构设计与分析

三轴测试转台结构设计与分析作者:王晨晨来源:《科学导报·学术》2020年第33期摘要:本文介绍了一种用于天线测试的三轴重载高精度转台,转台各轴均采用双电机驱动的方式实现齿轮消隙,实现较高的定位精度。
文章详细介绍了转台的技术指标及结构组成,并对传动链功率设计进行了计算校核。
使用Hyperworks/optistuct软件有限元建模,对搬运器进行各工况下变形和强度的力学分析。
分析结果表明,整机安全裕度符合设计指标要求。
关键词:三轴测试转台;定位精度;双电机消隙;驱动回差;引言高精度的重载测试转台作为关键设備,在雷达天线内场、外场标定中起着不可替代的作用,其承载能力、测角精度和定位精度直接关系到测试实验的可靠性和置信度。
其中,精密三轴天线测试转台可在实验环境下模拟重型天线实际工作时的各种姿态,复现其不同姿态下的微波场特性,从而对其微波器件的功能和性能反复仿真、测试和标定,是天线近场测量的重要设备之一[1-3]。
随着雷达天线阵面尺寸重量的大型化和高精度化,对测量标定转台设备的性能和精度要求也在不断提高。
因此,高精度重载多轴测试转台的研究和制造,对航空航天及国防建设有重要意义[4]。
本文所述三轴转台主要为位置和随动功能转台,承载较大,为侧重静态稳态性能的角度指示型测试转台。
其可承载较大负载并实现三轴大范围转动,并可在大负载下保持在空间的稳定指向;可接收上位机的控制指令,实现相应的上方位、俯仰和下方位任意位置定位或随动运动,引导被测天线精确指向目标,并可长时间锁定在该位置,以满足标校测试要求。
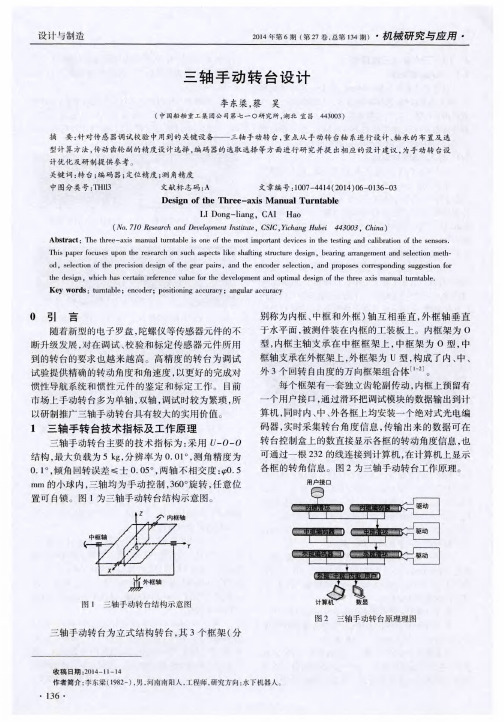
1.技术指标及结构系统组成三轴测试转台由上、下方位轴和俯仰轴组成,各轴均具有定位锁定及掉电位置锁定功能。
其中上、下方位轴配置导电滑环,可360︒连续旋转,其它基本技术指标如下:三轴转台主要由上方位转台、俯仰轴系和下方位转台三大部分组成。
上方位转台由上台面、上回转支承、精密减速机、驱动齿轮、汇流环、双级旋变和上底座等组成;俯仰框架主要由主齿轮、中心主轴、轴承组、二级减速齿轮、限位开关、双级旋变、俯仰框架和限位挡块组成;下方位转台由下台面、下回转支承、精密减速机、驱动齿轮、汇流环、双级旋变和下底座等组成。
三轴转台台体结构设计说明
[7] 陈时锦、张龙江、蔡鹤皋.三轴转台框架的形状优化设计.中国惯性技术学报1996
[8] A Louis. Design Study for a High Accuracy Three-Axis Test Table. AIAA
[17]陈兴林.三轴飞行仿真转台控制系统设计与研究[D]. 哈尔滨:哈尔滨工业大学, 1994
[18] Louis. A. Demove. Design Study for High Accuracy Three-axis Test Table.AIAA. Guidance and Control Conference, 1985.
仿真转台性能的优劣直接关系到仿真试验可靠性和置信度,是制导回路精度的关键。这给兼顾岸舰和舰空导弹导引头仿真的三轴仿真转台高实时、高精度和高频响等技术指标提出了很高要求,这给仿真转台的总体方案确定和研制提出了新的课题,也给转台测控系统设计与实现提出了更高的要求。世界上一些军事大国,如美国、俄罗斯、德国、法国等都特别重视仿真系统的研究开发,投入大量的人力、物力。美国是世界上最早研制和使用转台的国家,它的第一台转台于1945年诞生于麻省理工学院(MIT)。至今为止,美国转台的研制和使用,无论在数量、种类,还是在精度和自动化程度上都居于世界领先地位,代表了当今世界转台的发展水平和方向。英、法、德等国也从事转台的研制工作,但无论投入的人力和财力,还是所达到的水平都不如美国。俄罗斯的惯性技术水平也较高,但由于保密性强,对其具体情况了解不多。美国60年代开始,对转台的主要部件如轴承、驱动元件、角度传感器和检测仪器进行了系统的改进,研制成功了专用于转台的空气轴承,大调速比、高精度液压马达和高分辨率的角度传感器,并开发了宇航专用飞行仿真软件,实现了系统仿真由模拟系统向数字仿真系统的转变,由部分功能仿真向全弹道仿真的转变,代表了目前国际的先进水平。1969年之后,美国的转台设计和制造进入了系列化阶段:位于宾夕法尼亚匹兹堡的康特维斯-戈尔兹公司(Conirvs- Goez Cooperatio,简称CGC)成为美国制造惯性导航测试设备和运动模拟系统的主要厂商,并一直代表着美国乃至世界惯性设备,尤其是转台的发展水平。从70年代初开始,CGC着手研制并生产系列多轴陀螺测试转台, 1972年为DraPer实验室的第三代陀螺仪和 Honeywen公司的静电支撑陀螺仪研制成功了53D型和53E型转台,1978年为西德航空航天研究试验院研制成功了53G一型转台。53系列转台台体的形式均为多轴,其中53B型为四轴惯性制导测试系统,53D型、53E型、53G型、53W型为三轴转台,普遍采用了气浮轴承,轴系回转精度和正交精度均达到角秒级,使用感应同步器作测角元件,测角精度和定位精度均达到1角秒。1984年CGC公司开始研制“高精度三轴测试台ITATT'',ITATT''是超精密三轴测试设备,其三轴的综合指向精度小于1’’,0.001~200°/s下的瞬时速率误差<=10^-6。ITATT在轴承、台体结构、驱动装置、测角系统、控制方法、电气系统和信号传输与处理方面都有许多新技术得以应用,比如采用有源磁悬浮轴承。随着寻的制导半实物仿真的需要,国外还研制出五轴转台。美国卡坷公司生产的5一450R.5型转台,其内面三轴模仿导弹的姿态角运动,外面两轴用于目标仿真。仿真系统进入了实用化和商业化阶段,对高精度导航控制系统的研发起了极大的促进作用。由于仿真转台在军事和国防上的敏感性,国外一直对我国进行技术封锁和禁运。
三轴手动转台设计
外 框 轴承 间距 L 外:5 0 m m, 中框 轴 承 间距 L 中= 4 1 0 m m, 内框 轴承 问 L 内= 3 6 0 m m,
2 . 3 光 电轴角 编码 器 的选取
光 电轴角 编码 器 的精 度 直 接 影 响 到 系统 的控 制
令轴承内圈跳动量为 6 , 转台工作 台中心到外框
2 三轴手动转 台的结构设计
2 . 1 总体 结 构 的设计
根 据三轴 手 动转 台 的设 计要 求 , 转 台采用 U - O 一 0结 构 , 外框为音 叉 ( U型 ) 结构 , 中环 为 封 闭 的 0 型, 内环平 面 载 物 台 为 0结 构 。采 用 高精 度 齿 轮 传 动 和增 量式 光 电编 码 器 作 为 角度 传 感 器 。三 个 框 架 设 计应遵循 提 高刚度 减少 转动 惯量 的原 则 , 同时要 考 虑加 工工 艺性 和后 期 的可 维 护性 。设计 时需 要 从
键部件 , 并要有尽可能小的摩擦力矩 , 所选用 的轴承
都应 是 高精 度 的轴 承 , 为保 证 轴 承 的精 度 , 主轴 的结 构 如 图 4所示 。轴承 与轴 、 轴承 座 的配合 必须 松 紧适 度, 并加 预 紧力 以提 高 轴 承 刚度 , 使 轴在 轴 向 和径 向
正确定位 , 减少轴承振动和噪音 , 减少滚动体 的空转
打滑 , 提 高 轴承 的寿命 。 转 台 中各框 轴 系结 构基 本 确 定后 J , 根 据技 术 要 求 中倾 角 回转 误 差 ≤士 0 . 0 5 。 , 两轴不相交 度 : 0 . 5 m m 的小球 内 , 选 取 轴 承 精 度 来保 证 三 轴仿 真 转
台 的回转精 度 。
三轴伺服移动平台控制系统的设计
金华职业技术学院J I N H U A P O L Y T E C H N I C毕业教学环节成果(2014届)题目三轴伺服移动平台控制系统的设计学院信息工程学院专业电气自动化班级自动化111学号201131010350102姓名指导教师2014年5月30日金华职业技术学院毕业教学成果目录摘要 (3)英文摘要 (3)引言 (4)1 三轴伺服移动平台控制系统简介 (5)2 控制系统结构及工作原理................................. 错误!未定义书签。
3 主要器件选型 (6)3.1 可编程控制器的选型 (7)3.2 触摸屏的选型 (7)4 I/O口分配表 ........................................... 错误!未定义书签。
5 控制系统电路设计 (8)5.1 PLC外围接线图 (8)5.2 伺服电机控制电路图 ............................... 错误!未定义书签。
5.3 横移电机控制电路图 ............................... 错误!未定义书签。
6传感器................................................. 错误!未定义书签。
6.1 左右移动位置传感器 ............................... 错误!未定义书签。
6.2上下移动位置传感器................................ 错误!未定义书签。
6.3 车位检查传感器 ................................... 错误!未定义书签。
7安装................................................... 错误!未定义书签。
7.1控制系统接线图 (9)7.2 控制柜电气元件布局图 ............................. 错误!未定义书签。
三自由度精密转台设计
电 子 机 械 工 程
2005年第 21卷第 5期
Electro - M echan ica l Eng ineer ing
2005. Vol. 21 No. 5
三自由度精密转台设计 3
袁海平 (中国电子科技集团公司第十四研究所 , 江苏 南京 210013)
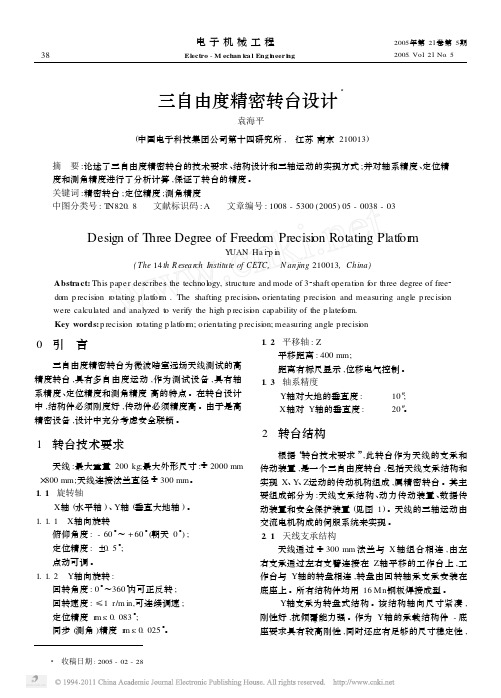
摘 要 :论述了三自由度精密转台的技术要求 、结构设计和三轴运动的实现方式 ;并对轴系精度 、定位精 度和测角精度进行了分析计算 ,保证了转台的精度 。 关键词 :精密转台 ;定位精度 ;测角精度 中图分类号 : TN820. 8 文献标识码 : A 文章编号 : 1008 - 5300 (2005) 05 - 0038 - 03
4 结 论
该三自由度精密转台的设计 ,结构紧凑 ,刚度好 , 精度高 ,满足使用要求 。该高精度转台的设计成功可 为同行借鉴 。
参考文献 :
[ 1 ] 吴风高. 天线座结构设计 [M ]. 西安 :西北电讯工程学院 出版社 , 1986.
[ 2 ] 王生洪 ,龚振邦 , 王世萍编. 电子设备机械设计 [M ]. 西 安 :西北电讯工程学院出版社 , 1986.
3 收稿日期 : 2005 - 02 - 28
第 5期
袁海平 :三自由度精密转台设计
39
图 1 三自由度精密转台
为此设计成圆筒形结构 ,内壁两层和若干辐射筋 ,提高 其抗弯 ,抗扭刚度 。底座内上层安装轴承 ,中层安装旋 转变压器 ,在底座外有一安装减速机的托架 。为方便 接插电缆和便于旋转变压器的装拆及维护调整 , 底座 开窗孔 ,窗孔四周加凸缘 , 以加强此局部的结构刚度 , 并便于安装盖板 。转台底部中心部位装有方位主轴 , 联结于转盘底部 , 方位主轴通过联轴节带动旋转变压 器工作 。
三轴转台结构设计
三轴转台结构设计主要包括以下部分:机械结构:三轴转台机械结构主要包括底座、转台台体、中心轴、轴承等部分。
其中,底座是整个转台的基础,必须具有足够的刚性和稳定性,以支撑整个转台台体的重量和转动时的动态载荷。
转台台体是实现转动的主要部件,其设计应考虑到加工精度、转动惯量、负载能力等因素。
中心轴是连接底座和转台台体的关键部件,需要具有足够的刚性和耐磨性,以承受转动时的动态载荷和摩擦力。
轴承是实现转动的关键部件,需要选择适合的轴承类型和规格,以保证转台的转动精度和使用寿命。
控制系统:三轴转台控制系统包括控制系统硬件和软件两部分。
控制系统硬件主要包括控制器、驱动器、传感器等部分,用于实现转台的精确控制和监测。
控制器是控制系统的核心部分,可以接收来自上位机的指令,并根据指令控制驱动器的输出,以实现转台的精确转动。
驱动器是控制系统的执行机构,可以根据控制器的指令输出合适的电压或电流,以驱动电机转动。
传感器是控制系统的反馈机构,可以实时监测转台的位置、速度等参数,并将参数反馈给控制器,以实现闭环控制。
控制系统软件是实现精确控制的核心部分,可以采用各种控制算法和策略,以实现转台的快速、稳定、精确的转动。
负载结构:三轴转台负载结构主要包括负载安装板、负载支撑架等部分。
负载安装板是用于安装各种测试设备和仪器的部件,必须具有足够的刚性和平整度,以确保测试设备的稳定性和测试精度。
负载支撑架是用于支撑负载安装板的部件,必须具有足够的承载能力和稳定性,以承受各种测试设备和仪器的重量和动态载荷。
总之,三轴转台结构设计需要综合考虑机械结构、控制系统和负载结构等方面的因素,以确保转台的精度、稳定性和可靠性。
同时,还需要根据实际应用需求进行优化和改进,以满足特定的测试要求和使用场景。
毕业设计(论文)-三轴雷达仿真转台机械结构设计(含全套CAD图纸)

全套CAD图纸,联系153893706第1章绪论1.1 课题背景远古时代,人类的祖先面对着充满神秘色彩的天空,编织出许多美丽、动人的神话、传说故事。
这些故事经过无数代人的流传,便真有了冒险者,不惜生命代价尝试原始的飞行探险。
1903年12月17日,莱特兄弟第一架动力飞机的试飞成功,使人类飞行的梦想变为现实。
但是人类并没有为此而满足,他们将眼光瞄准了更遥远的宇宙空间。
1926年3月16日,美国人戈达德制成了世界首枚液体火箭。
1957年苏联卫星首次进入太空。
1969年7月20日,阿波罗11号飞船登月成功。
1981年4月12日,世界上第一架航天飞机哥伦比亚号发射。
从此人类进入了宇宙探险时代。
最早,飞行器上天之前要用许多实物进行实验研究,这样不仅造成许多财力、物力、和人力的浪费,而且有限的实验所获得的规律也不是十分的准确,其中存在很大的偶然性。
随着人类航天活动的越来越频繁,对设备的可靠性及经济性的要求也越来越高。
尤其是近几年来几次重大的航天飞行事故促使人们对以往的实验手段进行了深刻的反省,开始了仿真测试设备的研究,仿真转台就是在这样的背景下产生和发展起来的。
二十世纪七十年代后,计算机尤其是数字计算机的发展为仿真技术提供了更高的技术基础。
现在仿真转台已应用到航空、航天设备的研制和测试的各个环节。
1.2 仿真转台的国内外发展状况1.2.1 国外仿真转台的发展状况美国是世界上最早研制和使用转台的国家,它的第一台转台于1945年诞生于麻省理工学院。
从那时起直到现在,美国的转台研制和使用,无论在数量、种类,还是在精度和自动化程度上都居于世界领先水平,代表了当今世界转台的发展水平和方向。
此外,英、法、德、俄等国也投入了大量的人力、财力进行仿真转台的研究。
但是以美国最为典型,下面主要以美国的转台研究和发展为例进行介绍。
回顾美国转台的发展过程,大体可以分为以下几个阶段:第一阶段的主要标志:用机械轴承支撑台轴,轴的驱动采用交流力矩电机。
三轴转台结构介绍

三轴转台结构介绍
三轴转台是一种用于控制物体运动的机械结构,主要由三个轴线组成。
每个轴线都有自己的旋转方向和角度范围,通过控制这些轴线的运动,可以实现物体在三维空间中的任意姿态变换。
三轴转台的结构通常由底座、旋转平台和控制系统组成。
底座是整个转台的支撑部分,通常采用坚固的金属材料制成,以确保结构的稳定性和承重能力。
旋转平台是转台上的工作台面,可以绕三个轴线进行旋转。
控制系统则是用于控制转台运动的电子设备。
三轴转台的三个轴线分别是水平轴、俯仰轴和横滚轴。
水平轴允许物体在水平方向进行360度的旋转,俯仰轴允许物体在垂直方向上进行上下旋转,而横滚轴则允许物体在垂直方向上进行左右旋转。
在实际应用中,三轴转台可以用于各种领域,如航空航天、机器人技术、摄影摄像等。
在航空航天领域,三轴转台可以用于模拟飞行器的姿态变化,从而测试飞行器的稳定性和控制性能。
在机器人技术中,三轴转台可以用于控制机器人的头部或手臂的运动,实现更精确的操作。
在摄影摄像领域,三轴转台可以用于控制相机的姿态,拍摄出更稳定、流畅的画面。
三轴转台的控制方式通常有两种,一种是手动控制,即由操作人员通过控制面板或遥控器来控制转台的运动。
另一种是自动控制,即通过预先设定的程序来控制转台的运动。
自动控制可以实现更精确
的控制,避免了人为操作的误差。
总的来说,三轴转台是一种功能强大的机械结构,可以实现物体在三维空间中的姿态变换。
它在各个领域都有着广泛的应用,为相关行业的发展和研究提供了重要的支持。
未来随着科技的不断进步,三轴转台的性能和功能还将不断提升,为人们带来更多的便利和创新。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种可全方位移动的三轴转台结构设计
摘要:本文介绍了一种适用于一些小型飞行器模拟测试的实验平台,按要求对其结构进行了设计,并制作了实验的样机。
该实验平台实现可以三个旋转自由度和地面的全方位移动,并且该平台不需要驱动元件,结构简便实用。
关键词:三轴转台;全方位移动;结构设计
引言
三维转台作为航空、航天研究中的关键地面设备是导航制导设备的关键,所以转台的技术研究一直受到发达国家航空航天领域的高度重视。
三轴转台是用于飞机,导弹,飞船等其他飞行器及地面半实物仿真的关键设备,它可在实验室环境内实时地模拟复现飞行器在空中的动力学特性和飞行器在空间进行中滚转、俯仰、偏航等的运动姿态,转台技术广泛应用于航空、航海、国防建设领域中。
目前,各国研究制作的转台都是带有驱动机构的大型控制转台,这些测试转台无论是机械结构还是测量控制系统都极其复杂,转台的制作使用成本昂贵,操作复杂;而且,这些平台大多是不可自由移动的。
这对于一些需要在地面自由移动的小型简易的实验飞行器和其他一些需要低成本半实物仿真的设备,显然是不适合。
而针对这种在地面自由移动,低成本,使用、操作方便的飞行器设备实验仿真测试平台。
本文提出一种新的可全方位移动的三轴转台设计。
1.结构设计
1.1整体结构方案设计
按照设计要求,本设计具体地说是一种可全方位移动的三轴转台,包括彼此转动连接的转动部分及移动平台,转动部分包括转杆、中环及外环,移动平台包括底座、支杆及万向轮,外环转动安装在底座上,底座上沿周向均布有多个支杆,每个支杆均连接有万向轮,通过万向轮实现水平方向前后、左右两个平移自由度;中环转动安装在外环内,转杆作为被测对象的载体转动安装在中环内,通过转杆相对于中环转动、中环相对于外环转动及外环相对底座转动实现三个旋转自由度,如图1所示。
图1 转台三维模型
1.2转动部分结构设计
转台的转动部分包括中间转杆、中环及外环,具体情况可以参照图1。
中环和外环采用的正八边形的形状。
中间的转杆作为被测对象的载体,主要是方便固定安装飞行器和转台连接,也可以用其他构件代替。
转杆的两端分别通过转轴转动连接于中环内,中环的两侧分别通过转轴转动连接于外环内,转杆和中环之间
的两转轴之间的连线与中环和外环之间的两转轴之间的连线垂直且共面。
外环与转轴之间为过盈配合,中环与转轴之间为间隙配合,中环与转杆之间转轴的配合与之相同,这样保证了转台部分的灵活转动。
转杆与中杆之间的转轴上设有轴用卡簧卡紧固定,防止转轴脱落,中环与外环之间的转轴上也同样安装有轴用卡簧卡紧固定,保证转台的转动平稳。
1.3移动部分结构设计
移动平台包括底座、支杆、连接块及万向轮,具体情况可以参照图1。
底座的侧表面上沿周向均布有四个支杆,本设计中在底座的四个侧面连接一个支杆;每个支杆的一端分别通过销钉固接于底座的侧表面上,支杆的另一端通过螺钉固接于万向轮的连接块上。
连接块上开有四个螺纹孔,通过螺钉实现与万向轮的连接,带有刹车的万向轮可以固定转台。
连接块上可以连接其他类型的万向轮,如牛眼轮等。
1.4移动和移动连接处结构设计
移动和移动连接处结构设计影响整个转台的性能和可靠性。
本文采用如图2所示的结构设计。
(图中3为外环,7为支杆,11为销钉,12为底座,13为角接触轴承,14为孔用卡簧,15为底轴,16为外环固定螺钉,21为轴用卡簧)。
图2 底轴连接处剖视图
在外环的底部开有供底轴一端插接的通孔,并在通孔的两侧分别开有用于实现与底轴连接的螺纹孔,底轴的一端通过螺钉与外环的底部固接。
底轴的另一端与底座之间安装两个角接触轴承支撑连接,保证转台部分平稳灵活的转动;两个角接触轴承采用背对背的安装方式,该安装方式下的两个角接触轴承的接触线交点在轴承外侧,稳定性好,可以承受倾覆力矩。
两个角接触轴承通过孔用卡簧及轴用卡簧固定,两个角接触轴承实现了底轴的灵活转动,并有效地防止了晃动。
2.工作原理
转杆可以和四旋翼飞行器通过固定螺钉实现固定连接,四旋翼飞行器可以在转台中自由旋转,通过传感器可以采集飞行器的姿态等数据。
考虑试验对象的多样性,可以把转杆取下,被测对象也可以直接通过转轴与中环连接在一起或者更换其他合适零部件。
3.结论
根据上述设计的全方位移动的三轴转台结构模型,加工安装实验样机。
从制作的样机中看出该平台的结构简便紧凑牢靠。
不需要驱动机构,没有复杂的控制系统,使用操作方便,制作成本低。
本平台适用性强,适合各种小型飞行器。
实验对象可以和转杆连接,也可以借助转轴与中环直接连接或者增加零部件,可实现三个旋转自由度和两个移动自由度调节,底部万向轮可以锁死,也可以根据需
要更换各种类型的万向轮。
参考文献:
[1]石金彦,李旻辰.某光电跟踪引导系统转台结构设计[J].水利电力机械,2006.27(5):45-47.
[2]蒋蓁,李海兴,龚振邦.微型三轴转台的研究[J].机电一体化,2004.10(3):17-20.
[3]向熠,胡长明.某发射转台的结构设计仿真与验证[J].电子机械工程,2008.24(5):39-42.
[4]胡细娟.飞行器三轴仿真转台动力学分析与实验研究[D].武汉工程大学,2012.。