电机及其控制器技术规范
非道路电动车辆电机控制器通用技术要求及试验方法
非道路电动车辆电机控制器通用技术要求及试验方法非道路电动车辆电机控制器是非道路推土机、叉车、堆高机等产品的核心部件,其性能和质量直接影响着车辆的动力系统和使用寿命。
因此,制定并遵守一系列通用技术要求及试验方法是非常重要的。
非道路电动车辆电机控制器的技术要求包括但不限于以下几个方面:1. 高效率和变速范围:电机控制器应具备高效能转换能力,以保证车辆具备良好的加速性能和高速驱动能力;同时还应支持多段变速,灵活适应不同工况需求。
2. 高可靠性和稳定性:电机控制器应具备良好的抗干扰能力,能够适应车辆在各种复杂环境和工况下的正常运行;同时还应具备过流、过温、过压等保护功能,以确保车辆及其驾乘人员的安全。
3. 自动识别和系统监测:电机控制器应具备自动识别电机类型和参数的功能,并能根据实际情况自动调整电机工作状态;同时还应具备系统监测功能,及时发现故障并采取相应措施,保证车辆的稳定运行。
针对非道路电动车辆电机控制器的试验方法可以根据以下几个方面进行评估:1. 效能测试:通过对电机控制器的转换效率和输出功率进行测量,评估其能量利用效率和输出性能。
2. 环境适应性测试:在极端气候条件下,检测电机控制器的工作性能和稳定性,评估其在不同温度、湿度和海拔等环境下的适应能力。
3. 故障保护测试:模拟电机控制器可能遇到的过流、过温、过压等故障情况,检验其保护功能的可靠性和响应速度。
制定非道路电动车辆电机控制器通用技术要求及试验方法的目的在于确保电机控制器的质量和性能,为非道路电动车辆的运行提供可靠保障。
只有符合规定要求的电机控制器才能获得认证,并在市场上合法销售和使用。
这将有助于推动非道路电动车辆行业的发展,并提高产品的竞争力和可持续性。
非道路电动车辆电机控制器通用技术要求及试验方法的制定是非常必要的,它能够规范电机控制器的生产和使用,提高产品的质量和可靠性,为用户提供更好的使用体验。
同时,加强监管和执行,确保规范的实施,将为非道路电动车辆行业的可持续发展提供良好保障。
电机控制器检测规范标准

电机控制器检测规范标准电机控制器检测试验标准1、环境条件1.1实验环境条件:1.1.1温度在-20℃-40℃。
1.1.2相对湿度在10%-75%之间。
1.2使⽤环境条件:1.2.1当环境温度在-20℃-80℃时,控制器能按规定的定额运⾏。
1.2.2在相对湿度不超过100%情况下能正常⼯作,即控制器表⾯产⽣凝露时也可正常⼯作。
2、实验检查项⽬2.1机械尺⼨及外观检测2.1.1按照产品的设计图纸,检查控制器外形和安装尺⼨是否符合要求,外观是否整洁⽆损伤,表⾯是否贴有检验标识和铭牌,字迹内容要求清晰⽆误。
2.1.2控制器出线铜排表⾯平整,安装牢固可靠,整齐⽆污渍。
2.2基本性能检测2.2.1控制器可在规定的电压和电流下正常运⾏。
2.2.2控制器应可以使⽆刷直流电机实现怠速、正反转运⾏、调速等基本功能的控制。
2.3各种保护功能及信号输出检测2.3.1过温检测:当控制器在超过规定温度时⾃动停⽌运⾏,并在温度降低到允许值时才可以继续运⾏。
2.3.2过流检测:当控制器的母线或相线电流超过允许值时应能⾃动断电保护并发出报警信号。
2.3.3过压检测:当控制器的输⼊电压超过其最⼤输⼊电压时⾃动发出报警信号。
2.3.4⽋压检测:当控制器的输⼊电压低于其最⼩输⼊电压时⾃动报警信号。
2.3.5堵转检测:在电机堵转超过规定时间时,控制器应停⽌对电机输出电流,并发出报警信号。
2.3.6霍尔故障检测:当电机的位置传感器输出异常信号时,控制器应停⽌对电机输出电流,并发出报警信号。
2.3.7加速器信号异常检测:当控制器检测到加速踏板在上电时的信号异常时禁⽌对电机输出,并发出报警信号。
2.3.8刹车断电:当控制器检测到刹车信号输⼊时停⽌对电机输出。
2.3.9刹车复位:当控制器发⽣过温、过压、⽋压、堵转、霍尔故障、加速器信号异常等故障后,检测到故障消失且有刹车信号输⼊后即可复位。
2.3.10速度输出信号:控制器应能根据电机转速的变化⽽输出对应的脉冲信号。
汽车电动汽车用电机及控制器布置规范
电动汽车用电机及控制器布置规范1范围本蟒准规定了电动汽车用电机及控制器(以下荷称电机及控制器)及其相关附件的布置形式和布置原则°本标准适应于本公司生产的混合动力、纯电动等所有新能源车型.2规范性引用文件下列文件对于本文件的应用是必不“少的。
凡是注日期的引用文件,仪所注日期的版本适用于本文件。
凡是不注日期的引用文件,其量新版本(包括所有的修改单)适用于本文件。
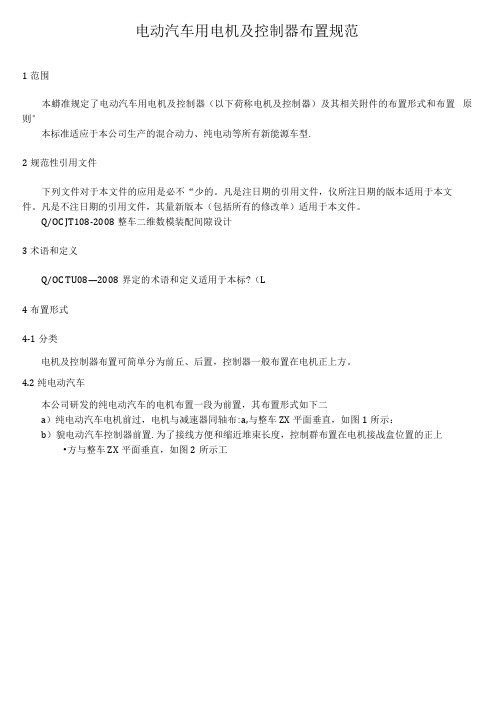
Q/OC JT108-2008整车二维数模装配间隙设计3术语和定义Q/OC TU08—2008界定的术语和定义适用于本标?(L4布置形式4-1分类电机及控制器布置可简单分为前丘、后置,控制器一般布置在电机正上方。
4.2纯电动汽车本公司研发的纯电动汽车的电机布置一段为前置,其布置形式如下二a)纯电动汽车电机前过,电机与减速器同轴布:a,与整车ZX平面垂直,如图1所示:b)貌电动汽车控制器前置.为了接线方便和缩近堆束长度,控制群布置在电机接战盒位置的正上•方与整车ZX平面垂直,如图2所示工图1前置电机布置形式I图2前亘控翻器布克形式]<3混合动力汽车混合动力汽车的电机布置M以前置也可以后置,其布置形式如下,El)混合动力汽车电机前置,电机与发动机同轴布置与整车ZX平面垂直,如图3所示:b)混合动力汽车控制楼而置,为了接线方便和筋短缓束长度,同时要避让发动机及其附件J控制器布置在电机上方与整车ZX平面垂直,如图4所示Fc)混合动力汽车电机及控制器后置,为了实现四强功能,发动机前置,电驱动桥后:B・电机及控制器后置,电机与旗速器同轴布丘修整车ZX平面垂直.图3前五电机布适形式n图4前置控制赤布置形式II图5后置电机布置形式对于电机、控制器及其附件的布置,底保证工作川配J井能灌足整车布置的需要和整车性能的发挥;应保证机舱与发动机、变速器,底盘之间布置和设计的合理也电机及控制器的通风散热.诏音隔热良好,与其他零部件最小间隙合理、拆卸方便F同时还要保证安装T艺性、有足热的刚度和强度.一般从以下几个方面进行布置考出r动、除占间隙要求工装配工艺性要求;雄脩方便性等要求:。
电机控制技术手册

电机控制技术手册第一章:引言电机控制技术是现代工业中不可或缺的一部分。
它能够实现对电机系统的全面控制和管理,提高生产效率和产品质量。
本手册旨在介绍电机控制技术的基本原理和常见应用,帮助读者理解和掌握相关知识。
第二章:电机基础知识2.1 电机的工作原理电机是将电能转换为机械能的设备。
根据不同的原理和结构,电机可以分为直流电机、交流电机和步进电机等多种类型。
本节将详细介绍各种电机的工作原理和特点。
2.2 电机控制的基本原则电机控制的基本原则是根据实际需求对电机进行启动、停止、调速等操作。
常见的电机控制方法包括直接启动、星三角启动、变频调速等。
本节将详细介绍各种电机控制方法的原理和适用范围。
2.3 电机控制系统的组成电机控制系统由电源、控制器、传感器和执行器等组成。
每个组成部分都扮演着关键的角色,确保电机能够按照预定要求工作。
本节将逐一介绍各个组成部分的功能和作用。
第三章:电机控制技术的应用3.1 电动机控制系统电动机控制系统广泛应用于机械制造、能源、交通运输等领域。
本节将通过具体案例,介绍电动机控制系统在驱动各类机械设备中的应用和优势。
3.2 电机控制器的选型与调试电机控制器是电机控制系统中最重要的部分,其选择和调试对于系统的稳定性和性能至关重要。
本节将介绍如何根据实际需求选择合适的电机控制器,并对其进行调试和优化。
3.3 电机控制技术在智能制造中的应用随着工业智能化的发展,电机控制技术在智能制造中的应用越来越广泛。
本节将介绍电机控制技术在智能制造中的典型应用案例,包括自动化装配线、机器人等领域。
第四章:电机控制技术的发展趋势4.1 变频调速技术变频调速技术是当前电机控制技术的主流趋势之一。
本节将介绍变频调速技术的原理和应用优势,并展望其未来发展方向。
4.2 无感矢量控制技术无感矢量控制技术是电机控制技术领域的前沿技术。
本节将介绍无感矢量控制技术的原理和应用,并探讨其对电机控制技术的影响和未来发展方向。
电机控制器技术协议参考样板
电机控制器技术协议参考样板引言电机控制器是电力电子技术在机电系统中的一个重要应用,是电动汽车、电机控制系统等领域的核心部件。
在电机控制系统的设计过程中,技术协议的制定是非常重要的一步。
本文档为电机控制器技术协议参考样板,旨在帮助设计人员和工程师在制定技术协议时提供参考。
术语和缩写•MCU:Micro Control Unit,单片机•MOSFET:Metal-Oxide-Semiconductor Field-Effect Transistor,金属氧化物场效应晶体管•PWM:Pulse Width Modulation,脉宽调制•CAN:Controller Area Network,控制器局域网•SOC:State of Charge,电池剩余电量技术要求1.电机控制器输入电压范围:DC 200V-400V;2.电机控制器的输出电流范围:20A-100A;3.电机控制器的额定输出功率:10kW~50kW;4.采用高性能MCU控制器,运行频率不低于100MHz;5.电机控制器的电源电压范围:DC 12V~48V,工作电流不超过5A;6.控制器内部依据实时电机状态、转速等情况动态调节PWM波形,使其满足电机特性;7.电机控制器的输出电压必须具有流控制功能;8.输出电压采用MOSFET开关,在转速方面采用稳流调节PWM技术;9.电机控制器必须支持CAN总线通信,通信速率不低于1Mbps;10.电机控制器具备电池剩余电量( SOC )检测功能;11.电机控制器具有过流保护功能;12.电机控制器具有短路保护功能;13.电机控制器具有超温保护功能;14.电机控制器具有故障自诊断功能。
硬件要求1.电机控制器采用双面SMT工艺,保证电路可靠性;2.控制器采用铝合金外壳,具有良好的散热性能;软件要求1.控制器上需搭载操作系统,驱动程序、中间件和应用程序等;2.操作系统必须依据保密性要求进行配置;3.软件开发过程需严格遵循工业标准,确保软件质量。
新能源汽车电机控制器生产制造规范

汇报人:XXX 2023-12-14
目 录
• 引言 • 电机控制器生产制造流程 • 电机控制器关键技术要求 • 生产环境与设备要求 • 人员培训与操作规范 • 质量管理体系与持续改进计划
01 引言
背景与目的
• 随着全球能源结构的转变,新能源汽车逐渐成为未来交通出行 的重要趋势。电机控制器作为新能源汽车的核心部件,对于车 辆的性能、安全和环保等方面具有至关重要的作用。因此,制 定一套科学、规范的新能源汽车电机控制器生产制造规范,旨 在提高产品质量、降低生产成本、确保生产过程的安全与环保 ,为新能源汽车行业的快速发展提供有力支撑。
未来发展规划与目标设定
未来发展规划
企业应根据市场趋势和自身发展需求,制定未来发展规划, 明确发展目标、战略和重点。
目标设定
企业应根据未来发展规划,设定具体的、可衡量的、可实现 的、相关性强和时限明确的目标,并制定相应的实施计划。
THANKS FOR WATCHING
感谢您的观看
质量管理体系的运行
企业应确保质量管理体系的有效运行,通过定期内部审核和外部认证,不断完 善和优化质量管理体系。
持续改进计划制定与实施情况介绍
持续改进计划的制定
企业应根据市场需求和产品质量要求,制定持续改进计划,明确改进目标、措施 和时间表。
持续改进计划的实施
企业应按照持续改进计划,采取有效的措施,不断优化生产过程、提高产品质量 和降低成本。
02 电机控制器生产制造流程
原材料采购与检验
01
02
03
供应商选择
选择具有良好信誉和稳定 质量的供应商,确保原材 料的可靠性和稳定性。
原材料检验
对采购的原材料进行严格 的检验,包括外观、尺寸 、性能等方面,确保符合 设计要求和国家标准。
汽车电动汽车用电机及控制器布置规范

电动汽车用电机及控制器布置规范1范禺本标准规定了电劫汽车用电机及揑制器C以下时称电机及拄制器)及茹村关附件的布宣瞪式和布宜本标准适.应于本公司主产的混合动力、纯电动等所有新能源车型“2规范性引用文件下列文件对于本文件的应用足必不町少的.凡足注日期的引用文件,便所注日期的版本适用于本文件。
凡足不注日期的引用文fh英阜新版本(包括所有的修改单)适用于本丈件。
Q/OC1T108-2008整车二维数模•装配间隙设计3术语和定义Q.OC1T108—2008界定的术语和定义适用于本标孤4布養形式4-1分类电机及控制器布負町简单分为前氐后民揑制器一般布罢在电机疋上方。
4.2纯电动汽车本公司研妊的纯电动汽车的电机布宣一般为丽宣,苴布置形或如下:a)纯电动汽车电机niK,电机与减連辭同轴AB,与整车ZX平而垂去,如图1所示:b)纯电动汽车揑制器前置*为了按线方便和縮垣血束长度,揑制器布置在电机按线盒位贾的正上方与整车ZX平而垂直,如图2所示.图1前置电机布萱形式I图2前査控屈器布直形式I4.3混合动力汽车馄令动力汽车的电机布爲町以前爲也训以后民英布置形式如下,E1)混含动力冼车电机前•置・电机与发动机同軸布置与整车竝平面垂宜,如图3所示:W握合动力汽丰控制器丽置,対了接线方便和術短缓束长度,同时墜进让发动机及苴附件J控制需布置在电机上方与整车ZX平面垂宜.如图4所示「C)混合动力汽车电机及绘制器后巴为了实现四驱功能,发动机E V3,电驱动桥后置.电机及径•制歸后食,电机与减連黑同轴布置与整年ZX平面垂宜.2图3前査电机布直形式FT ZX甲面I I控制器图4繭養控制器布置形式TI图5后重电机布査形式5布壬要求对于电机.控制髀及It附件的布置,应保吐T作町能J并能嵩足整车布置的需墓和整车性能的发挥;虑保证机船与发动机、变逋器.底盘之间布蜀和设计的合理性,电机及揑制器的通凤散热.隔音殊热良好,与直他零部件灵小间隙合理、拆卸方便,同时还亞保证安装工艺性、有圮谚的刚度和强度.一般从以下几个方面进行布置考.L別a)动、静握间隙要求「b)装囱工艺性要求;c)雉條方便性咎要求*d)安全碰攒夏求:e)热力学布置要求:F)NVH性能要求|g)各系统性腌要求"6布査原則6.1前養电机及控制器6-11纯电动汽车6.1.1.1纯电动汽车电机及控制器一般布置在汽车丽枪,空何相对比较宽裕,相关何隙要求见表。
电动汽车用电机控制器设计规范
8.2.10
8.2.10.1
8.2.10.2
8.2.10.3
8.2.10.4
8.2.11
8.2.12
驱动电机控制器的外形和安装尺寸应符合供应商与我司双方之间协定的外形和安装尺寸要求,具体以双方确认的图纸和数据为准。
8.2.13
8.2.14
应不超过双方协商确定的数值。
8.2.15
8.2.16
——增加了机械环境术语定义(见3.2);
——修改了4.2.1(见4.2.1.2,2016年版的4.3.1);
——增加了信号检测精度(见4.2.2);
——修改了电机控制器温升限制(见4.2.3,2016年版的4.2.9);
——修改了控制器对加速踏板信号的响应范围(见4.2.4,2016年版的4.3.2);
表1工频耐压值
最高工作电压Udmax
试验电压(均方根值)
Udmax≤60
60<Udmax≤125
125<Udmax≤250
250<Udmax≤500
Udmax>500
500
1000
1500
2000
2Udmax+1000
8.3
8.4
8.4.1
8.4.2
8.4.2.1
8.4.2.2
通过
注:
8.4.2.3
GB
GB
GB/T 2423.17
GB/T 2900.33
GB/T 4208
GB/T 13422-
GB/T 17619-1998
GB/T 18488.1-2015
GB/T 18488.2-2015
GB/T 19596
GB/T 29307-2012
电机控制技术及应用
电机控制技术及应用电机作为现代工业和生活中不可或缺的动力源,其控制技术的发展对于提高电机的性能、效率和可靠性具有重要意义。
电机控制技术涵盖了从简单的开环控制到复杂的闭环控制,以及先进的智能控制等多个方面,并且在众多领域得到了广泛的应用。
一、电机控制技术概述电机控制技术的核心目标是实现对电机转速、转矩、位置等参数的精确控制,以满足不同应用场景的需求。
常见的电机控制方法包括以下几种:1、开环控制开环控制是最简单的控制方式,它根据给定的输入信号直接控制电机的驱动电路,而不考虑电机的实际运行状态。
这种控制方式结构简单、成本低,但控制精度较差,容易受到电机参数变化和外部干扰的影响。
2、闭环控制闭环控制则通过反馈环节实时监测电机的运行参数,并与给定值进行比较,然后根据偏差来调整控制信号。
常见的闭环控制有速度闭环控制、转矩闭环控制和位置闭环控制。
闭环控制能够有效地提高控制精度和稳定性,但系统结构相对复杂,成本较高。
3、矢量控制矢量控制是一种先进的电机控制技术,它通过将交流电机的定子电流分解为励磁分量和转矩分量,并分别进行控制,实现了对电机磁通和转矩的解耦控制,从而获得了与直流电机相似的控制性能。
矢量控制具有良好的动态性能和调速范围,广泛应用于高性能的交流调速系统中。
4、直接转矩控制直接转矩控制直接对电机的转矩和磁链进行控制,不需要复杂的坐标变换,具有响应速度快、结构简单等优点。
但在低速运行时,转矩脉动较大,限制了其在某些高精度应用中的使用。
二、电机控制技术的关键要素1、传感器传感器在电机控制系统中起着至关重要的作用,用于检测电机的转速、位置、电流、电压等参数。
常用的传感器有编码器、霍尔传感器、电流互感器等。
高精度、高可靠性的传感器能够为控制系统提供准确的反馈信息,从而提高控制性能。
2、控制器控制器是电机控制系统的核心,负责处理传感器反馈信号,并生成控制指令。
常见的控制器有微控制器(MCU)、数字信号处理器(DSP)和可编程逻辑控制器(PLC)等。
超声波电动机及其驱动控制器通用技术条件
超声波电动机及其驱动控制器通用技术条件超声波电动机及其驱动控制器通用技术条件是指超声波电动机及其驱动控制器的技术规范和标准,它们是超声波电动机及其驱动控制器生产和使用的基础。
超声波电动机及其驱动控制器是一种新型的电动机和控制器,它们具有高效、低噪音、低振动、高精度等优点,广泛应用于机器人、医疗设备、精密仪器等领域。
超声波电动机是一种利用超声波振动产生的机械振动来驱动转子旋转的电动机。
它的工作原理是利用超声波振动产生的机械振动来驱动转子旋转,从而实现电动机的转动。
超声波电动机具有高效、低噪音、低振动、高精度等优点,广泛应用于机器人、医疗设备、精密仪器等领域。
超声波电动机的驱动控制器是一种用于控制超声波电动机转速和方向的电子设备。
它的主要功能是控制超声波电动机的转速和方向,从而实现超声波电动机的精确控制。
超声波电动机的驱动控制器具有高效、低噪音、低振动、高精度等优点,广泛应用于机器人、医疗设备、精密仪器等领域。
超声波电动机及其驱动控制器通用技术条件包括以下方面:1. 性能指标:超声波电动机及其驱动控制器的性能指标包括转速、转矩、功率、效率、噪音、振动等。
2. 外观尺寸:超声波电动机及其驱动控制器的外观尺寸应符合国家标准和行业标准。
3. 工作环境:超声波电动机及其驱动控制器的工作环境应符合国家标准和行业标准。
4. 安全性能:超声波电动机及其驱动控制器的安全性能应符合国家标准和行业标准。
5. 可靠性能:超声波电动机及其驱动控制器的可靠性能应符合国家标准和行业标准。
6. 电气性能:超声波电动机及其驱动控制器的电气性能应符合国家标准和行业标准。
7. 环保性能:超声波电动机及其驱动控制器的环保性能应符合国家标准和行业标准。
总之,超声波电动机及其驱动控制器通用技术条件是超声波电动机及其驱动控制器生产和使用的基础,它们的制定和实施对于推动超声波电动机及其驱动控制器的发展和应用具有重要意义。
电动汽车电机及控制标准

电动汽车电机及控制标准全文共四篇示例,供读者参考第一篇示例:随着全球对环境保护意识的不断提高,电动汽车的普及和市场需求也在逐渐增长。
作为电动汽车的核心部件,电机及控制系统的标准化是保证车辆性能和安全的重要保障。
本文将从电动汽车电机及控制标准的制定、内容要求和实施情况等方面进行探讨。
一、电动汽车电机及控制标准的制定随着电动汽车产业的不断发展,各国纷纷制定了相关的电动汽车电机及控制标准。
国际电工委员会(IEC)制定了IEC 61800系列标准,涵盖了电动汽车电机控制系统的基本要求、性能指标和测试方法等内容。
欧洲标准化委员会(CEN)和欧洲电气和电子工程师协会(IEEE)也分别发布了相关的标准规范,为电动汽车电机及控制系统的标准化提供了技术支持。
电动汽车电机及控制标准主要包括以下几个方面的内容要求:1. 电机性能:包括电机功率、转速、效率等性能指标的要求,确保电机能够正常运行并满足车辆性能需求。
2. 控制系统:包括驱动器、控制器、传感器等控制系统的设计、安全性能和通信接口等方面的要求,确保控制系统能够实现对电机的准确控制和保护。
3. 安全性能:包括电机过载保护、电磁兼容性、防火防爆性能等安全性能要求,确保电机及控制系统在各种工况下能够安全可靠地工作。
4. 标准测试方法:包括电机和控制系统的性能测试、环境适应性测试、耐久性测试等标准测试方法的规定,确保电机及控制系统的性能和可靠性得到有效验证。
5. 标准化标识:包括电动汽车电机及控制系统的标准化标识,统一规范产品的型号、规格、技术参数等信息,方便用户选型和使用。
目前,各国对于电动汽车电机及控制标准的实施情况各有不同。
一些发达国家如美国、德国、日本等在电动汽车电机及控制标准化方面较为成熟,相关标准得到了广泛应用,为电动汽车产业的健康发展提供了有力支持。
而一些新兴国家如中国、印度等在电动汽车电机及控制标准化方面还存在一定的滞后和不足,亟需加强标准制定和实施工作,提高产品质量和市场竞争力。
电机控制器国家标准
电机控制器国家标准电机控制器国家标准是指对电机控制器在设计、制造、安装和使用过程中的技术要求和规范的统一规定。
电机控制器作为电机驱动系统的核心部件,其性能稳定与否直接关系到电机的运行效率和安全性。
因此,制定并执行电机控制器国家标准对于保障电机设备的安全可靠运行具有重要意义。
首先,电机控制器国家标准应包括对电机控制器的基本要求,包括但不限于电气性能、机械性能、环境适应性等方面的规定。
在电气性能方面,应明确电机控制器的额定电压、额定电流、额定功率等参数,以及对电机控制器的过载保护、短路保护、过压保护、欠压保护等功能的要求。
在机械性能方面,应规定电机控制器的外观尺寸、安装方式、散热方式等要求。
在环境适应性方面,应规定电机控制器在不同环境温度、湿度、振动等条件下的使用要求,以确保电机控制器在各种复杂环境下都能正常运行。
其次,电机控制器国家标准应包括对电机控制器的性能测试方法和评定标准。
在性能测试方法方面,应明确电机控制器在出厂前需要进行的各项性能测试,包括但不限于静态特性测试、动态特性测试、电磁兼容性测试等。
在评定标准方面,应规定各项性能测试的合格标准,以及对不同性能指标的评定方法和要求。
此外,电机控制器国家标准还应包括对电机控制器的安装、使用和维护的规定。
在安装方面,应规定电机控制器的安装位置、安装方式、接线要求等,以确保电机控制器安装正确、牢固、安全。
在使用方面,应规定电机控制器的操作要求、使用环境要求、故障处理方法等,以确保电机控制器在使用过程中能够稳定可靠地运行。
在维护方面,应规定电机控制器的维护周期、维护方法、维护内容等,以确保电机控制器的寿命和性能。
总之,电机控制器国家标准的制定和执行对于规范电机控制器的生产、安装和使用具有重要意义。
只有制定了科学合理的国家标准,才能够有效地提高电机控制器的质量和可靠性,保障电机设备的安全运行,促进电机行业的健康发展。
因此,各相关部门和企业应加强合作,共同制定和完善电机控制器国家标准,为电机行业的发展做出积极贡献。
原动力电缸直线电机模组及控制器技术要求

原动力电缸直线电机模组及控制器技术要求设备需求数量:1套一、电缸(直线电机)参数详细要求:对于原动力电缸(直线电机)的参数要求:(1)行程约为0.35米以上。
(2)功率为1000W到1500W之间。
(3)输出推力为1500N左右。
二、电缸(直线电机)实现要求:(1)实现力控制(2)实现位移控制(3)要有限位保护等常规的保护措施以下为具体要求:三、原动力电缸(直线电机)实现要求:如下图所示,原动力电缸(直线电机)(直线电机)就是目前我们所需要的电缸(直线电机)。
原动力电缸(直线电机)推动发电电缸运动,希望原动力电缸(直线电机)输出的力和时间呈正弦关系,带动发电电缸做往复运动。
对于发电电缸,相应输出也是一个正弦力。
发电电缸原动力电缸设原动力电缸(直线电机)的输出为单个正弦:1sin E F A t ω= (1)设发电电缸的输出为:2sin()L F A t ωϕ=+ (2)其中,1A 大于2A ,ϕ 为阻抗角。
目前所需除了要求1.就是原动力电缸(直线电机)输出为公式(1)所说的 。
要求2.我们希望在公式(1)的公式上减去一个位移分量,位移分量相当于模拟出一个弹簧力。
公式(1)变为:1sin E F A t Ks ω=- (3)K 为系数,s 为电缸位移。
其实Ks 也为一个正弦函数,原动力还是控制为正弦函数。
控制框图如下(实际上是电流闭环完成,但是力曲线还是这样的):**位移指令实时反应当前的实际位置;其中 A 为所需力振幅, ω为可控的角速度(即正弦周期), K 为系数, s 为电缸位移(通过测量获得)通过第一个框公式计算可以获得力的给定。
要求3.为模仿不规则波力的输出,希望电缸(直线电机)输出力为几个正弦函数叠加,公式如下:1122334455sin()sin()sin()sin()sin()F A t A t A t A t A t ωωωωω=++++举个例子:22222500sin()100sin()300sin()50sin()200in()468210F t t t t t πππππ=++++ 则电缸(直线电机)力输出曲线图为:除此之外,这个力也得和要求2.一样,减去位移分量Ks 。
电动汽车用电机及其控制器技术条件

电动汽车用电机及其控制器技术条件本标准在技术内容上非等效采用国际电工委员会IEC 60785:1984《电动道路车辆用旋转电机》和IEC 60786:1984《电动道路车辆用控制器》。
在编写顺序上参照IEC 60034.1:1996《旋转电机定额与性能》。
本标准引用GB 14711-1993《中小型旋转电机安全通用要求》和GB/T 12668-1990《交流电动机半导体变频调速装置总技术条件》中有关电机及控制器的安全要求。
在电磁兼容性方面采用GB14023-2000《车辆、机动船和由火花点火发动机驱动的装置的尤线电骚扰特性的限值和测量方法》中有关电机及控制器的辐射干扰允许值的规定和GB/T 17619-1998《机动车电子电器组件的电磁辐射抗扰性限值和测量方法》中抗扰性限值的规定。
本标准的附录A和附录B是提示的附录。
本标准由国家机械工业局提出。
本标准由全国汽车标准化技术委员会归口。
本标准起草单位:中国科学院电工研究所、清华大学、重庆电机厂、华中科技大学、西北工业大学、信息产业部电子工业标准化研究所。
本标准主要起草人:李世毅、温旭辉、姚若萍、刘林、马志源、季小尹、陈俐。
1 范围2 引用标准下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。
本标准出版时,所示版本均为有效。
所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。
GB 755-200 旋转电机定额和性能GB/T 2423.17-1993 电工电子产品基本环境试验规程试验Ka:盐雾试验方法GB/T 4772.1-1999 旋转电机尺寸和输出功率等级第1部分:机座号56~400和凸缘号55~1080GB/T 4942.1-1985 电机外壳防护分级GB/T 4942.2-1993 低压电器外壳防护等级GB 10068.2-2000 轴中心高为56 mm及以上电机的机械振动—振动的测量、评定及限值GB 10069.3-1988 旋转电机噪声测定方法及限值噪声限值GB/T 12665-1990 电机在一般环境条件下使用的湿热试验要求GB/T 12668-1990 交流电动机半导体变频调速装置总技术条件GB 14023-2000 车辆、机动船和由火花点火发动机驱动的装置的无线电骚扰特性的限值和测量方法GB 1471l-1993 中小型旋转电机安全通用要求GB/T 17619-1998 机动车电子电器组件的电磁辐射抗扰性限值测量方法GB/T 18488.2-2001 电动汽车用电机及其控制器试验方法GB/T 2900.25-1994 电工术语旋转电机GB/T 2900.26-1995 电工术语控制电机GB/T 2900.33-1993 电工术语电力电子技术3 定义本标准除采用GB/T 2900.25、GB/T 2900.26、GB/T 2900.33中的定义外,还增加了下列定义。
电动汽车电机控制器国家标准分析-2022年学习资料

1、电机控制器相关试验准备-仪器:-标准规定实验室采用的电气测量仪器、仪表准确度不低于0.5级(兆欧表-除 ,直流分流器准确度应不低于0.2级-数字式转速测量仪的准确度应不低于0.1±1个字;转矩测量仪及测功机-的 确度应不低于1%(直测效率时应不低于0.5%);温度计的误差在-士1°C以内。-被测值应位于仪表量程20% 95%的范围内。-电源:-标准规定所直流电源应符合车辆用电池的电压和电流特性,电源输-出阻抗要与规定的电池 抗尽可能相等。-布线及冷却装置:-测试中的布线与冷却条件应模拟车辆中具体使用条件。
8、电机控制器EMC要求-标准只对电机及控制器的电磁辐射以及电磁辐射抗扰度进行了要求,-目前长安相关电机控 器的EMC均需满足长安的EMC测试的规范(规范-名,电机控制器需要进行的EMC测试项目如下表所示。
电机控制器相关试验方法-1.试验准备-2.一般性试验项日-3.环境试验-4.温升试验-5.效率测试-6.再 能量回馈试验-7.EMC要求
4、电机控制器防护等级要求-标准规定控制器的防护等级可参考GB/T4942.1-2001和GB/T4942 2-1993的要-求。针对该点,长安根据不同器件以及其不同布置位置情况,对器件的防-护等级进行了规范,详见 2。-器件布置位置-IP等级要求-发动机仓-后备箱-底盘-成员仓内
5、电机控制器温升要求-根据标准要求,电机控制器中各部件的温升应不超过下表规定-部件与器件-材料与被覆层升/K-电力半导体器件及其他-不超过相应标准的规定-电器元件-器件的规格规定适用-温度-紫铜、无被覆层-6 -连接于一般低压电器的-紫铜、搪锡-65-母线连接处的母线-紫铜、镀银-70-铝、超声波搪锡-55-45接于电力半导体器件-的母线连接处的母线-35-与半导体器件相接的塑-料绝缘导线或橡皮绝缘
简述电机控制器的关键技术
简述电机控制器的关键技术
电机控制器是用于控制电机运行的设备,其关键技术包括以下几个方面。
首先,电机控制器需要实现对电机的精确控制。
通过对电机的电流、转速、角度等参数进行调节,可以实现对电机运行状态的准确控制。
因此,精确的电流、速度和位置反馈传感器是电机控制器不可或缺的组成部分。
其次,电机控制器需要实现对电机的启动和停止控制。
电机的启动过程需要提供足够的电流来克服电机的惯性和阻力,而停止过程需要通过减小电流或者制动来使电机停下来。
因此,电机控制器需要具备启动和停止控制算法,以确保电机的安全运行。
另外,电机控制器需要实现对电机的速度和位置控制。
速度控制常用的方法包括调整电机的电流、电压和频率,以控制电机转速;而位置控制则可以通过使用位置传感器来实现,通过控制电机的角度来实现对位置的精确控制。
此外,电机控制器还需要实现对电机的保护措施。
电机在工作过程中可能会出现过载、过热、欠压等故障情况,因此电机控制器需要具备故障检测和保护机制,及时采取措施避免电机损坏。
最后,电机控制器还需要考虑节能和噪音控制。
通过优化电机的控制算法和调整参数,可以减少电机的能耗和噪音产生,提高电机的效率和性能。
总结起来,电机控制器的关键技术主要包括精确控制、启动和停止控制、速度和位置控制、保护措施以及节能和噪音控制。
这些技术的应用和优化可以提高电机控制器的性能和可靠性,满足不同场景下的电机控制需求。
V200电机控制器技术数据手册说明书
V200, V210, V250, NEMA SIZE 5 VACUUM MOTOR CONTROLLER 1.L. 17263Kickout Spring AdjustmentThe kickout spring is not disturbed by any maintenance described in this leaflet, and it should not need to be adjusted. However, when the contactor is in the de-energized, open position, the crossbar should be solidly against the frame, so that it cannot move any further open even when pulled. If it can be moved, the kickout spring must be stretched to hold the crossbar firmly against the frame. Refer to Figure 10. Loosen the lock nuts and tighten the adjusting screws alternately (to keep the spring on centerline) until the force from the spring holds the crossbar properly open. Lock the two lock nuts again.0 0 (J 0 0 00 0@ @0 0LockNuts 0 AdjustingScrewFig. 10 Kickout SpringInspection After Short CircuitThe V200 motor controller is intended to be protected by power fuses and/or a circuit breaker in accordance with the NEC. However, the magnitude of a short circuit may exceed the damage threshold of the vacuum bottles. After a short circuit, the unit should be examined for any apparent physical damage, or deformation of conductor bars and cables. If there is any evidence of severe stress, it is recommended that the unit be replaced. If the overtravel has changed significantly (from the last inspection) on one or more bottles, the unit should be replaced.A dielectric test would not by itself confirm that the unit should be returned to service after a fault. However, if there is no physical evidence of stress, and if the overtravel exceeds the .020 in. minimum, the bottles can then be dielectrically tested as outlined previously. If physical stress, overtravel, and dielectric are O.K., it is reasonable to return the unit to service after a fault.Insulation LevelRefer to the insulation resistance measurements between poles and from each pole to ground that were recorded at start-up and subsequent intervals. Measure the same points in the same manner and record. Investigate any sudden reduction in resistance or any unusually low reading.Dust and moisture are detrimental to electrical equipment. Industrial equipment is designed to tolerate a less-than-perfect environment. However, excessive dust can cause trouble, and should be wiped or blown off at appropriate intervals. If the contactor is wet for any reason, it must be dried until insulation resistance between poles and from each pole to ground has returned to normal.TABLE VIII -ACCESSORIESFuse Block Kits ...:.... Meet requirements ofNEC concerning common control fusing.Cat. No.Order Qty. DescriptionF56 2 Contactor mounted Fuse Holderfor 1 600 volt Bussman KTK Fuse FKR Panel mounted Fuse Holder for 2Class CC (Bussman KTKR) Fuses* *Use when available fault current exceeds 10,000 amperes Order Fuses Separately By Ampere Rating. Controller Minimum Wire SuggestedSize Size in Control Circuit Fuse Sizet5 #16 AWG 10 AMPt When using a control transformer,select fuse sizeper the National Electrical Code.Effective 9/89 Printed inUSAPowering Business Worldwide。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机及其控制器技术规范1总则1.1电动汽车是一种道路车辆,工作条件恶劣,工作负荷与转速变化范围大,且变化剧烈,空间受到很大限制。
对电机及控制器的比功率和性能要求严格,对安全性和可靠性要求高。
同时,实现电机及其控制器的最佳匹配与整合,将两者作为一个系统来考核、检验和评价是必要的。
电机及其控制器除了遵守和满足现有的相关标准和法规外,提出以下技术规范,便于科学、准确、全面地对电动汽车电机及其控制器进行评价和性能对比。
本技术规范作为电机及其控制器的产品型式试验和验收的依据。
1.2本规范适用于蓄电池电动汽车、混合动力电动汽车、燃料电池电动汽车的驱动电机及其控制器。
其它电动道路车辆的驱动电机及其控制器也可参考使用。
1.3辅助电机在电动汽车上用于驱动空气压缩机、转向液压泵、雨刷等辅助机械,本规范也可参照使用。
2引用标准GB/T18488.1-2001GB/T2423.17-93TB/T3001-2000GB/T4942.1-1985GB/T4942.2-1993GB/T12665-1999GB/T12668-1990GB/T14023-2000GB/T18387-2001JT/T325-2002电动汽车用电机及其控制器技术条件电工电子产品基本环境试验规程试验Ka:盐雾试验方法铁路机车车辆用电子变流器供电的交流电动机电机外壳防护分级低压电器外壳防护等级电机在一般环境下使用的湿热试验要求变流电动机半导体变频调速装置总技术条件车辆、机动船和火花点火发动机驱动的装置的无线电骚扰特性的限制和测量电动汽车电磁场辐射强度的限值和测量方法宽带9kHz~30kHz营运客车类型划分及等级评定轴中心高为56mm及以上电机机械振动一振动测量、评定与限值机动车电子电器组件的电磁辐射抗扰性限值和测量方法GB/T18488.2-2001电动汽车用电机及其控制器试验方法GB10068-2000GB/T17619-1998GB/T10069.1-1988旋转电机噪声测定方法及限值噪声工程测定方法GB/T10069.2-1988旋转电机噪声测定方法及限值噪声简易测定方法GB10069.3-19883技术文件3.1电机及其控制器研制产品应按照合同要求提供技术文件及相应的图样制造,出厂时应出具研制产品合格证。
旋转电机噪声测定方法及限值噪声限值3.2电机及其控制器研发单位应在检查验收试验一周前向车辆总体组及验收试验单位提交电机、控制器的设计说明、技术条件、电路原理图、安装位置尺寸图、接线线路图以及使用说明书等完整的技术文件。
3.3根据合同与接口协议的规定,以书面报告和图样提交样机的外形尺寸、接口尺寸及安装尺寸、单机(含附件)总重量,计算出体积比功率与重量比功率等指标,并符合合同的要求。
3.4M查电机及其控制器冷却方式与冷却部件安装尺寸,必须符合合同或技术协议的要求。
4使用环境条件4.1温度在一25七~+60。
C条件下,在正常负荷下,电机及其控制器按合同规定的定额可靠运行,温升符合表1中规定的限值。
4.2相对湿度在100%的相对湿度条件下,电机及其控制器能正常工作。
4.3城市工况和市郊工况具体要求见GB/T18488.1-2001附录B o4.4盐雾电机及其控制器应具有一定的抗盐雾能力,并能满足GB/T2423.17-93中的规定。
4.5机械强度在控制器壳体的30X30cm2面积上加K)Okg重力,不发生明显的机械变形。
4.6承受振动根据电机及其控制器的安装部位,按照GB/T18488.2-2001中5.12的规定,承受上下方向的定频振动和扫频振动检验,试验后不会有机械损坏、变形和紧固部分的脱落现象,通电流后能正常工作。
4.7碰撞安全电动汽车发生碰撞后,电机及其控制器不致因损坏或短路引起二次破坏,危及乘客及设备安全。
5特性与特征值5.1特性5.1.1连续额定特性电机及控制器连续额定特性是指在动力蓄电池组电源或者相当于动力蓄电池组电源时,在额定条件下,整个工作转速范围内(每200r∕min一个测试点),测试控制器的输入电压、输入电流、电机输出轴的转矩、效率、功率与转速的函数关系或特性曲线。
5.1.2有制动工况的电机及其控制器对于有制动工况的电机,应表示出输入转矩、输出电压、输出电流、输出功率与转速的函数关系及其曲线。
5.1.3连续额定特性曲线在额定转速以下负载转矩为等转矩运行,在额定转速以上,负载为等功率运行。
特性曲线在实际使用的冷却条件和环境条件下,电机及其控制器连续工作2h,温度不超过表1给出的限值。
表1连续定额特性和其他定额的温度最高限值电机部件定子绕组、转子绕组滑环、换向器测量方法B电阻法电温度计法130℃120℃F155℃12O℃绝缘等级H180℃120℃200 200( 120℃3.2特征值电机及其控制器特性的参数按照运行条件和性能要求的合同规定值称为电机特性的特征值。
下列特征值应满足厂商与委托单位协商的合同规定。
5.2.1额定电压在额定运行条件下,电机运转时,在电机、控制器端子间电压。
5.2.2额定转速电机在额定运行条件下,输出轴的转速。
5.2.3额定转矩和额定功率在规定的运行条件下,电机在额定转速时输出额定功率的转矩为额定转矩。
额定转矩与额定转速的乘积为额定功率,由下式计算:MNPe=ee9549式中:Pe一电机额定功率kWMe—电机额定转矩N-mNe—电机额定转速r/min5.2.4电机及控制器整体额定效率n在额定条件下,电机在额定转速工作时,电机转轴的输出功率Pe除以控制器的输入功率PCI,或等于电机效率与控制器效率乘积,称为电机及其控制器的整体效率。
η=Pe=T11nηcPCI式中:nm—电机效率;T1C一控制器效率。
5.2.5超速试验额定电压下,电机空载运行的最高转速。
应在约12倍最大工作转速下运行2πIin,再在额定情况下运行Ih,未出现异常。
5.2.6最大工作转速引用GB/T18488.1-2001中5.22节要求,并持续运转时间不应小于3min。
5.3高效区特性在5.1相同条件下,电机及其控制器的整体效率大于85%的效率特性曲线范围内的连续额定特性列为高效区特性及其曲线区(每200r∕min一个测试点)。
条件允许时,最好在转矩与转速坐标上绘制等效率曲线,含效率T1=O.75至0.95在内的五条等效率曲线取代高效区特性。
5.4短时过载特性在做下列两项试验前,电机及其控制器为冷态。
5.4.1最大过载转矩电机及其控制器在最大过载电流条件下,电机转速小于等于额定转速运行时,持续时间为5min,电机的最大负载转矩,称为最大过载转矩。
绘制不同转速下的最大过载转矩特性曲线,同时检查温升不超过表2给出的限值。
5.4.2最大过载功率电机及其控制器在最大过载电流条件下,电机转速大于等于额定转速运行,持续3min以上,电机的输出功率达到最大过载功率,绘制不同转速下的最大过载功率特性曲线,同时检查温升不超过表2给出的限值。
表2短时过载特性的温度最高限值绝缘等级电机部件B试验初始值定子绕组、转子绕组试验最终值130℃255℃i8or3OO℃85X2F1OO℃H12O℃20013O℃5.5堵转特性为保证电动汽车具有足够的起步转矩。
电机及其控制器要达到合同规定的堵转特性,堵转电流不应超过规定的最大电流。
堵转试验在电机及其控制器接近实际冷却状态下进行。
试验时,将转子堵住,施加的堵转电流不超过规定的最大电流,测试转子在各个不同的角位(沿转子周围均匀分布取5个点)堵住时产生的转矩值,取其最小值,即为堵转转矩,堵转转矩的持续时间为20s,电机和控制器的温升不超过表2规定的限值。
6回馈制动特性6.1电动汽车减速或下坡行驶时,电机处于惯性旋转或被拖动,电动机转换为发电机工作状态。
发电机通过控制器应能给出125%的额定电源电压,给动力蓄电池组充电。
6.2测试回馈制动特性时,充电的最大电流幅值能达到电机及其控制器驱动时电源提供的额定电流值的50%,回馈时间为Imino7绝缘电阻7.1安全接地电机及其控制器中能触及的金属部件与外壳接地点处的电阻不应大于0.1Q,接地导线必须用黄/绿相间的双色线,接地点应有明显的接地标志。
7.2冷态绝缘电阻电机定子绕组对机壳的冷态绝缘电阻应大于20MΩo7.3热态绝缘电阻电机在室温、热态和受潮后都应有足够的绝缘电阻值。
额定功率在20OkW以下的电机,在湿热实验后,其热态绝缘电阻应不低于0.5MΩo7.4控制器中各带电电路与地(外壳)之间的绝缘电阻在环境温度40七和相对湿度95%时,应大于等于IMΩo7.5控制器中带电电路之间及带电零部件与导电零部件或接地零部件之间的电气间隙与爬电距离应符合GB/T12668.2—2000中4.3.13的规定。
7.6电机绕组的匝间绝缘应达到GB/T14711-1993中9.2.1的要求。
7.7接触电流电机及控制器应具有良好的绝缘性能,在正常工作时,其热态接触电流<2mAo7.8绕组对地耐电压耐电压试验通常使用工频正弦交流电(也可采用近似正弦波的交流电,频率为25~10OHz)o如果定货前经用户和制造厂双方同意,也可以使用直流电。
应在被试绕组和机座之间轮流施加试验电压,而非被试绕组均与机座相连,仅对所有部件安装到位的新造电动机才施加满值电压。
试验应在上述各项例行试验完成后,且电动机处于热态时立即进行。
根据所选用的试验方法,试验电压为表3所列出电压值的最大值。
试验电压应逐渐地施加上去。
初始电压不应超过最终值的1/3,达到最终值后,应保持6Oso如果直流环节和电动机绕组都没有正规接地点,那么,UdCU门)和Ue应取为:假如电路的任一点接地时,在各个电路上可能出现的最高对地电压。
7.9匝间耐电压可在该电动机的产品技术条件中要明确规定。
其电压脉冲幅值一般不低于2倍对地试验电压值,或者在半成品的检验中规定。
脉冲电压施加的时间一般不低于60s。
8振动与噪声电动汽车的优点之一是噪声低,JT/T325-1999规定大客车车内最高噪声限值70-8OdB(A)三个级别,交通部2002年新标准JT/T325-2002将高三级大客车车内噪声限值由7OdB(A)减低到68dB(A)o欧洲大客车车外噪声限值从目前的8OdB(A)降低到78dB(A)o最近国家正在修订新的机动车噪声标准,对噪声限值的要求越来越高O 电机及其控制器在启动、加速、最大工作转速和最大过载转矩工况下,产生的噪声应在标准GB10069.3-1988所规定限值基础上再降低3dBo8.2电机及其控制器在启动、加速、最大工作转速和最大过载转矩工况下运行时,产生的振动应符合GB10068.2的振动限值。
9电磁场辐射与抗干扰8.1电机及其控制器在运行中产生的电磁辐射不超过GB14023—2000中第4章规定的辐射干扰的允许值。