晶体的对称性
晶体的对称性

对称性与人类思维方式的联系
对称性思维方式是人类认知世界的一 种重要方式。人们习惯于将事物进行 对称性的分类、比较和思考,从而更 好地理解和把握事物的本质和内在规 律。
VS
对称性思维方式在科学研究和工程技 术中也发挥着重要作用。科学家们利 用对称性原理探索自然界的奥秘,解 决各种复杂的科学问题。工程师们则 利用对称性设计各种结构,提高产品 的稳定性和可靠性。
晶体的对称性
• 对称性的基本概念 • 晶体中的对称元素 • 对称性和晶体结构 • 对称性在化学中的运用 • 对称性与生物学的关系 • 对称性的哲学思考
01
对称性的基本概念
Hale Waihona Puke 称性的定义对称性是指一个物体或图形在某种变 换下保持不变的性质。在晶体学中, 对称性是指晶体在空间变换下保持不 变的性质。
对称性可以通过对称操作来描述,对 称操作是指将晶体进行刚性旋转、平 移、反演等变换后仍能恢复原状的操 作。
对称性的分类
晶体可以根据其对称性进行分类,常 见的晶体分类包括立方晶系、四方晶 系、六方晶系等。
VS
不同晶系的晶体具有不同的对称性, 晶体的对称性与其内部原子或分子的 排列方式密切相关。
对称操作的数学表达
对称操作可以用数学矩阵来表示,通过矩阵变换可以描述晶体的对称性。
对称操作的数学表达包括旋转矩阵、平移矩阵、反演矩阵等,这些矩阵可以用来描述晶体在空间中的 变换。
02
晶体中的对称元素
点对称元素
定义
01
点对称元素是晶体中以某一点为中心的对称操作,包括旋转、
反演、反映等。
描述
02
点对称元素在晶体中起着关键作用,它们决定了晶体的空间群
对称性在生物医学中的应用
1-3 晶体对称性
2
1 2 3 4 6 2 2 6 4 6
示
平行 斜插纸 纸面 面
二、宏观对称性的组合关系
1. 如果晶体中有两个或两个以上的镜面相交,则每两 个镜面的交线必定是一个对称轴,而对称轴的转角比 定时镜面夹角的二倍。
镜面夹角 180° 90° 60° 45° 30°
旋转轴转 角
360°
180°
120°
90°
Th
Td
O
Oh
晶类(点群)符号 国际符号(全) 国际符号(缩)
1 I(1)
1 I(1)
m
m
2
2
2/m
2/m
3
3
3
3
3m
3m
32
32
32/m
3m
2mm
mm
222
222
2/m2/m2/m
mmm
23
23
2/m3
m3
43m
43m
432
43
4/m32/m
m3m
全对称要素组合
I m(2)
2 2mI
3 3(3I) 33m 332 3323m(3323mI) 23m
三、平移群、布拉菲点阵 例:四方晶系
C→P
F→I
4
晶系 三斜 单斜
菱形
正交
立方
最低对称要素 无
一根二次旋转轴2 或旋转-反演轴2
一根三次旋转轴3 或旋转-反演轴3
三根相互垂直的旋 转轴32或旋转-反 演轴32
四根三次旋转轴43
熊夫列斯符号
C1 Ci(S2) Cs(C1h)
C2 C2h C3 C3i(S6) C3V D3 D3d C2V D2(V) D2h(Vh) T
晶体的对称性
晶体结构的对称性-董成
从空间群符号确定点群
点群可以从简略H-M符号通过下列变换得出: 1.把所有滑移面全部转换成镜面; 2.把所有螺旋轴全部转换成旋转轴。 例如: 空间群= Pnma 点群= mmm
空间群= I `4c2 点群= `4m2 空间群= P42/n 点群= 4/m
21,31,32,41,42,43,61,62,63,64,65
41
对称要素的符号表示
从晶系到空间群
7个晶系 (按照晶胞的特征对称元素分类)
旋转,反射,反演
32个点群
平移
14种Bravais格子
螺旋轴,滑移面
230个空间群
空间群国际符号LS1S2S3
运用以下规则,可以从对称元素获得H-M空间群符号。
对称方向
三斜 单斜
正交 四方 六角 三角 三角
立方
从空间群符号辨认晶系
1. 立方–第2个对称符号: 3 或 `3 (如: Ia3, Pm3m, Fd3m)
2. 四方–第1个对称符号: 4, `4 , 41, 42 或 43 (如: P41212, I4/m, P4/mcc)
3. 六方–第1个对称符号: 6, `6 , 61, 62, 63, 64 或 65 (如: P6mm, P63/mcm)
立变化。 特殊位置:所有不在一般位置的。 1. 处于一个或多个对称元素上的位置;
2. 其多重性是一般位置多重性的公因子,即比一般位置小(一个整数倍)。
3. 特殊位置的分数座标中必有一个(或多个)是不变的常数。
晶体结构的完整描述
1、晶体化学式 (化学成分)
2、名称
Chem Name Min Name
晶体的对称性
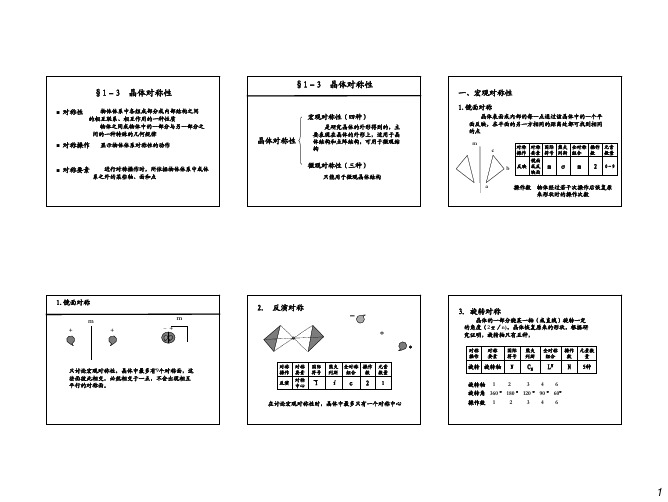
反映出晶体外形和其宏 观性质的对称性 当晶体围绕某一轴回转 若通过晶体作一平面,使 当晶体绕某一轴回转到 若晶体中所有的点在经 而能复原时,此轴即为 晶体的各对应点经此平面 一定角度时,再以轴上 过某一点反演后能复原, 回转对称轴。 反映后都能重合一致,则 的一个中心点做反演之 则该点就称为对称中心, 在回转一周的过程中, 该平面称为对称面,用符 用符号i表示 后能复原时,该轴称为 晶体能复原几次,就称 号 m— 表示 回转 反演轴。 几次对称轴。 晶体中实际可能存在的 对称轴有1、2、3、4和 6种,用国际符号1、2、 3、4、6表示。 5次及高于6次的不可能 存在
微观对称元素
( (2 1)螺旋轴 )滑动面
与宏观对称要素配合运用反映出晶 体中原子排列的对称性
螺旋轴是由回转 它是由一个对 轴和平行于轴的 称面加上沿着 平移所构成。晶 此面的平移所 体结构可借绕螺 组成,晶体结 旋轴回转一定角 构可借此面的 度同时沿此轴平 反映并沿此面 移一定距离而得 平移一定距离 而复原。 到重合,从螺旋 轴称为n次螺旋 轴。
晶 系 对 称 要 素
三 单 斜 斜 1 -1 m 2 2/m
正交 2mm 222 2/m 2/m 2/m
四方 -4 4 4/m -4 2 m 4mm 422 4/m 2/m 2/m 1个4或-4
菱方 3 -3 3m 32 -3 2/m
六方 -6 6 6/m -6 2 m 6mm 622 6/m 2/m 2/m 1个6或-6
点群及空间群
点群:晶体形态中全部对称要素的组合称为该晶体 形态的对称型或点群。
晶体的对称性可通过一些对称要素的运用而体现, 各种晶体因其对称性不同所具有的对称要素也不 同。晶体可能存在的对称类型可通过宏观对称要 素在一点上组合应用而得出,但这些组合并不是 任意的例如对称面不能不能与位于此面以外的对 称中心或任意倾斜的对称轴组合。因此,分析了 各种可能组合情况后确定只有32种点群。点群在 宏观上表现为晶体外形的对称。32种点群见表
07-2.3晶体的对称性
定义:点群是指一个晶体中所有点对称元素的集合。 点对称操作的集合称为点群。
晶体可能存在的对称类型可通过宏观对称元素在一点 上组合运用而得出。
点群在宏观上表现为晶体外形的对称。利用组合定律 可导出晶体外形中只能有32种对称点群。
点群可以用对称元素相结合而导出,在不破坏原有对称的
前提下,结合方式有n/m (表示m⊥n,镜面垂直于n次旋转轴), nm (表示m∥n,镜面包含n次旋转轴), n/mm或n/m m(第
晶体绕某一轴回转能复原n次,就称之为n次对称轴。 晶体中实际可能存在的对称轴有五种,并用符号1,
2,3,4,和6来表示。
旋转角 n名称 符号
360 180 120 90 60 度
1
2 3 4 6 次轴
1
2 356
2. 对称面
立方晶系{100} {110}
晶体通过某一平面作 镜像反映而能复原, 则该平面称为对称面 或镜面,用符号m表示。 对称面通常是晶棱或 晶面的垂直平分面或 者为多面角平分面, 且必定通过晶体几何
晶体基本的对称操作有点对称操作和平移对称操作。
在对称操作过程中保持空间至少有一个不动点的操作 称为点对称操作。在一般的对称操作过程中,空间有许多 点在动,但操作前后状态一样。 如旋转,反演,平面反映 均为点对称操作。
用点对称操作ห้องสมุดไป่ตู้组合可以描述有规则几何外形的单晶 体所具有的点对称性,但许多金属单晶体虽然不一定具备 规则的几何外形,但它们相应的点对称性却仍然存在。
180º与P3点重合,再经O点反 演而与P’重合,则称BB‘为2
次旋转—反演轴。
旋转—反演轴有1,2,3,4
和6次五种,分别以国际符号
_ ____
晶体的对称性
晶体对称性
晶体性质
晶体具异向性,并不排斥在某些特定的方向上性质相同。
这是因为在晶体的格子构造中,这些方向质点的排列是一样的,这就是晶体的对称性,表现在晶体外形上,即相等的晶面、晶棱和角顶有规律地重复出现。
晶体的对称性是晶体极其重要的性质。
中文名称
晶体对称性
英文名称
symmetry of crystal
定义
根据晶体其对称元素进行对称操作,能使其等同部分产生规律性的重合特性。
应用学科
材料科学技术(一级学科),材料科学技术基础(二级学科),材料科学基础(三级学科),材料组织结构(四级学科)
晶体的格子构造是晶体实现最小内能的结果。
由于晶体具有最小的内能,所以处于相对稳定的状态,这就是晶体的稳定性。
晶体只有在得到外来能量时,才能破坏其稳定性,有使之向非晶质转化。
这一点可以从晶体的加热曲线得到证明。
晶体的对称性

21
c
开普勒的老问题:为什么天上不下五角形雪花?
……从瓷砖铺 地的二维问题 来联想一下:
AB = 2acos = n a 由于-1cos1,所以,n = 0,±1,±2 所以,cos = 0,±1/2,±1; 得到基转角为90o,180º;60º,120º,360º 对应的旋转轴为 1,2,3,4,6对称轴。
晶体中存在3,6;不存在5,7,8
晶体的宏观对称元素
晶体的理想外形及其在宏观观察中表现出来的对称性称 为晶体的宏观对称性.
32个晶体学点群
将宏观对称元素合理组合得到32个宏子点群与晶体点群的区别: 水 C2V 冰 D6h 苯 D6h 苯晶体 D2h
晶体结构的对称性
晶体结构的对称性
晶体对称性的两个定理
1. 晶体中的对称轴(旋转轴、反轴、螺旋轴)必与一组 直线点阵平行, 除一重轴外, 对称轴必与一组平面点阵垂直; 晶体中的对称面(镜面、滑移面)必与一组平面点阵平行, 而 与一组直线点阵垂直.
2. 轴次定理: 晶体中的对称轴(旋转轴、反轴、螺旋轴) 的轴次只有1、2、3、4、6.
晶体的对称性
(5)n度螺旋轴:若绕轴旋转2/n角以后,再沿轴方向平
移l(T/n),晶体能自身重合,则称此轴为n度螺旋轴。其中T是
轴方向的周期, l是小于n的整数。 n只能取1、2、3、4、6。 (6)滑移反映面:若经过某面进 行镜象操作后,再沿平行于该面的某 个方向平移T/n后,晶体能自身重合,
则称此面为滑移反映面。 T是平行
B1
A1
A
B
1 cos 0, ,1 2
θ
π 2π , ,π 2 3
θ
2π 2π 2π , , 4 3 2
2π , n 1, 2, 3, 4, 6 综合上述证明得: θ n
晶体中允许的旋转对称轴只能是1,2,3,4,6度轴。
1
2
3
4
6
正五边形沿竖直轴每旋转720恢 复原状,但它不能重复排列充满一个 平面而不出现空隙。因此晶体的旋转
高 立 立方的 方 体对角 线方向
29
23 43,32 2 43,32,3m, i m3
432 43,34,62
43m 2 4
(4)旋转--反演对称
( x1 , x2 , x3 )
1 0 0 A 0 1 0 0 0 1
A 1
2π 以后,再经过中心反演,晶体自 n 身重合,则此轴称为n次(度)旋转--反演对称轴。
若晶体绕某一固定轴转
旋转--反演对称轴只能有1,2,3,4,6度轴。
旋转--反演对称轴用 1, 2, 3, 4, 6 表示。 旋转--反演对称轴并不都是独立的基本对称素。如:
1 0 0 A 0 1 0 0 0 1
A 1
(3)镜象(m,对称素为面) 如以x3=0面作为对称面,镜象是将图形的任何一点
固体物理学-晶体对称性

轴为n度旋转—反演轴,又称为n度象转轴。只有1,2,3,4,6。
(2)符号表示
1,2,3,4,6
2.n度象转轴简析
n度象转轴实际上并不都是独立的,通过下面的分析,可以
得到象旋转轴只有 4 是独立的。
Solid State Physics
(1) 1 象转轴—实际上就是对称心i
z ( u轴 )
A
A 点 绕 旋 转 轴 (z 轴 ) 旋
于不同的群。由旋转、中心反演、镜象和旋转--反演点对称操作构成的群,
称作点群。
理论证明,所有晶体只有32种点群,即只有32种不同的点对称操作类型。
这种对称性在宏观上表现为晶体外形的对称及物理性质在不同方向上的对称性。
所以又称宏观对称性。
**在数学分析中需要考虑晶体结构周期性重复的制约。当晶体具有一个以上
如图所示,A和A'等同,如同镜子一样。
2.表示方式
(1)熊夫利符号表示— ;
(2)国际符号表示—m。
z
A
A
y
O
x
x , y, z
A
A
x , y, z
O-xy 相当于镜面。
Solid State Physics
镜面操作的数学描述
如以x3=0面作为对称面,镜象是将图形的任何一点
0 0
0
0
1
|A|=1 or -1
单位矩阵
Solid State Physics
基本对称操作
平移(Translation)
中心反演(Inversion)—具有对称中心
转动(Rotation)—具有对称轴
镜面(Reflection)—具有对称面
平移是一切晶体的内部结构都具有的对称性
晶体对称性

晶体对称性晶体对称性是晶体学研究的一个重要组成部分,它是晶体结构的关键,可以解释晶体的外观、性质以及界面问题。
其中,最常见的是空间群,它用数学表示法确定变换的形式。
接下来,让我们来更多地了解晶体对称性:一、空间群1. 什么是空间群:空间群是一种变换群,也是对称性理论的基础,可以描述物体在特定坐标系中的集合子空间上的空间操作。
举个例子,如果一个物体只可以在空间系中做180°旋转,那么它就只具有一种(即旋转)拓扑群。
2. 空间群划分:空间群可以根据对称性来划分,主要包括有限对称群、无限对称群和单调对称群三类。
其中,有限对称群表示法子群的形状、大小或空间构造不变;无限对称群指的是无限种变换,其轴心、空间点或空间构造不变;而单调的对称群是单一的元素组成的,在该空间群中任何对称性都不变。
二、对称性1. 什么是对称性:对称性是空间群的基础,一般来说,它表示物体在某种坐标下有特定形状和空间操作的属性,也可以用数学表示法来表达这种特征。
2. 对称性的类型:对称性的类型可以分为四大类,分别是正交对称性、立体对称性、平面对称性和点对称性。
其中,正交对称性主要涉及空间中的空间坐标变换,立体对称性是指物体在立体坐标系下的操作,而平面对称性是指物体在平面坐标系下的操作,而点对称性则是指物体在特定空间构造下的操作。
三、晶体对称性1. 晶体对称性是什么:晶体对称性是晶体学研究的一个重要组成部分,它涉及到晶体结构的外观、性质以及界面问题的解释。
2. 晶体对称性的应用:晶体对称性可以用来研究和设计多种材料,如金属、半导体、有机分子晶体、生物晶体等,它们是将材料化学性质同物理性质关联起来,从而更好地理解材料的特性。
此外,晶体对称性也可用于分类、指导结构分析以及材料的设计和合成等。
四、总结从上文可以看出,晶体对称性是一个非常重要的概念,它不仅仅可以用来描述物体的形状、大小和空间结构,而且可以应用于许多不同的领域,如材料的研究与设计等。
浅谈晶体物理性质的对称性

浅谈晶体物理性质的对称性
晶体是由规则排列的离子、原子或分子构成的大规模分子结构,具有明显的晶体物理性质的对称性。
这种对称性可分为三种:空间对称性、光学对称性和门梁对称性。
一、空间对称性:
晶体的对称性决定了其外形,因此可以称之为“空间对称性”。
晶体的空间对称性可分为几何对称、点对称和面对称。
几何对称就是晶体位形,由多个元素平面和角组合而成,每一个元都可折叠到一个点。
点对称是指晶体的外形,在任意一整面可看做有规律的点状外形,由来自同一点的元素折叠而成,因此,其空间对称性也可以说是点对称。
面对称是由两个对面的元素折叠而成,因此,其空间对称性也可以说是面对称。
二、光学对称性:
大部分物质都具有双折射特性,即晶格结构中的离子、原子或分子可以阻挡透过去的光线,从而诞生出某种对称的折射现象,这种特性被称为“光学对称性”。
晶体的光学对称性可以表示为反射、折射、旋转等,反射和折射是典型的光学对称现象,旋转则是在一定范围内把光线转动,而不会影响其它属性。
三、门梁对称性:
也叫等值线对称性,指晶体内测得的各种基态的能量在某些轴向上有对称性,即在垂直于该轴的某条波前,能量均为相等的值,而不会随外部环境的变化而而变化,这种对称现象被称为“门梁对称性”。
4、晶体的对称性
(c) n度旋转反演轴
§1.6晶体的对称性
晶体经绕轴作n度旋转与中心反演的复合操作后与自身 重合则称其具有n度旋转反演轴对称。
晶体由于受周期性的制约,也只可能有2、3、4、与6度 旋转反演轴,分别用数字符号 2346 表示。
第 26 页
§1.6晶体的对称性
n 度旋转反演轴的对称性(操作的总效果一样)。
x~ ' x'
x2' 2 x3' 2 x12 x~A~Ax x~x
x22
x32
x~
'x'
x1'
x
' 2
x1'
x3' x2'
x3'
x~ ' 为转置矩阵,即行列互换所得矩阵。因此要求
第5页
即A为正交矩阵。
A ~ A I A ~ A1
第 45 页
§1.7 晶体结构的分类 我们已经知道布喇菲格子可以由
的格矢表示。
Rn n1a1 n2a2 n3a3
基矢a、b、c之间的关系,即其长度的异同和彼此间夹角 决定了不同的布喇菲格子的类型。
第 46 页
§1.7 晶体结构的分类
前面我们已经看到晶体在宏观对称操作作用下,其空 间格子必相应地变动。
分别为
0,60,90,120,180
第 21 页
§1.6晶体的对称性
即,晶体绕固定轴转动对称操作的转角只可能是
i 2
n
而n 必须是1、2、3、4、和6, i为任意整数。 常将这一类转动对称轴称作n度旋转轴,晶体周期性结构限制了只能
高中化学竞赛【晶体的对称性】

晶面3
c
晶面2
晶面1
b a
晶面指标示例
例题: 1. 某一立方晶系晶体,晶胞的顶点位置全为
A占据,棱心为B占据, 体心为C占据。①写
出此晶体的化学组成; ②写出A、B、C的
(4)十四种空间点阵形式 立方晶系有立方简单点阵P (立方P ) 、立方
体心点阵I (立方I ) 、立方面心点阵F (立方F );四 方晶系只有四方简单点阵P (四方P ) 、四方体心 点阵I (四方I ); 正交晶系有正交P 、正交I 、正交 F 、正交C (或侧心A和B); 单斜晶系有单斜P 、 单斜C ; 三方、六方、三斜都只有素格子。可见, 晶体只有14种空间点阵型式。见下图。
晶体的对称性
1.晶体的宏观对称性 晶体的宏观对称性就是晶体外型的对称性。
也就是有限物体的对称性。
方铅矿
金绿宝石
(1)晶体的宏观对称元素: 由于习惯原因, 晶体宏观对称元素与分
子对称性中的对称元素名称、符号都不完全 相同。
对称元素 旋转轴n 反映面或镜面m 对称中心i
反轴 n
对应对称操作 旋转L(α) 反映M 倒反I 旋转倒反L(α) I
3.晶面和晶面指标 晶面:晶体中平面点阵所在的平面。 晶面指标: 晶面在三个晶轴上的倒易
截数的互质整数之比。记为: (h*k*l*) 晶面与晶面的交线称为晶棱, 晶棱与
直线点阵对应。
例如, 右图中晶面 1在3个晶轴上的截数 分别:1/2,∞,∞, 因此倒 易截数:2,0,0, 划成互质 整数比后成为: 1:0:0, 因此晶面1的晶面指标 是: (100)。
晶体的对称性

点群的Schönflies符号:
主轴:Cn、Dn、Sn、T和O Cn:n次旋转轴; Sn : n次旋转-反映轴; Dn:n次旋转轴加上一个与之垂直的二次轴 T: 四面体群; O: 八面体群。
脚标:h、v、d h:垂直于n次轴(主轴)的水平面为对称面; v:含n次轴(主轴)在内的竖直对称面; d:垂直于主轴的两个二次轴的平分面为对称面。
用的几何变换(旋转和反射)都是正交变换——保持
两点距离不变的变换: ⎛ x ' ⎞ ⎛ a11 a12 a13 ⎞ ⎛ x ⎞
数学上可以写作:
⎜ ⎜⎜⎝
y z
' '
⎟ ⎟⎟⎠
=
⎜ ⎜⎜⎝
a21 a31
a22 a32
a23 a33
⎟⎟⎟⎠i⎜⎜⎜⎝
y z
⎟ ⎟⎟⎠
其中 Aij 为正交矩阵
从解析几何知道,符合正交 变换的是:绕固定轴的转动 (Rotation about an axis)
准晶态结构特点:具有长程取向序,没有长程平移对 称性。
其实准晶可以看作是具有平移对称性的六维超空间在三维真实 空间的投影
黄昆书 47-48 陈长乐书 20-22
1974年Penrose提出的数学游戏
五次对称的黄金分割无理数
边长有两种取值:1, 1+ 5 = 1.618
2
二十面体AlPdMn表面的STM图像
D2、C2V、D2h
C3、S6、D3 C3V、D3d
C4、S4、C4h、D4 C4V、D2d、D4h C6、C3h、C6h、 D6、C6V、D3h、
D6h T、Th、Td
O、Oh
P、C P、C、I、
F R P、I
H
晶体化学(晶体对称性)

划分正当晶胞或单位的原则中,主要做了两方
面的规定:
划分了七个晶系
一、应当尽量选取较规则的形状;
二、应当尽量选取含点阵点少的.
划分出十四种空间 点阵型式
立方 P, I, F
六方 H
晶 三方 R 系 四方 P,I
简单P 型 底心C 式 体心I
正交 P,C(或侧心),I,F
面心F
单斜 P,C
侧心A或B
三斜 P
∴3垂直一平面点阵
3
b3 T3
T1
a1b1
b2 a2
T2
a3
3. 晶体中对称轴的轴次 A
设晶体中有一轴次为 n 的旋转轴,通
过点阵点O垂直纸面
B
则在晶体的空间点阵中,必有一平 面点阵与 n 垂直.
取直线点阵Tm=ma,并设素向量为 a
根据点阵与平移群的关系:
点阵点
平移群
a作用于O必得A点(为点阵点),-a作用于O 得 A'
4
对称操作
倒反
I
反映
M
旋转 旋转 旋转 旋转 旋转 旋转倒反
L(0 ) L(180 ) L(120 ) L(90 ) L(60 ) L(90 )I
二、宏观对称元素的组合和32个点群
晶体宏观对称元素的组合 晶体的独立的宏观对称元素只有八种,但在某一晶体中可以只存在 一个独立的宏观对称元素,也可能有由一种或几种对称元素按照 组合程序及其规律进行合理组合的形式存在。 晶体中,宏观对称元素组合时,必受以下两条的限制:
为什么要考虑带心格子?
立方面心格子,若按左图取素格子只能表现三方对称性;若取右图 所示的复格子就表现出立方对称性(格子选取方式不能改变点阵结构的对 称性,但点阵固有的较高对称性在素格子上可能被掩盖):
晶体的对称性

一个具有21的图形
21所对应的对称操作群为:
L(π )T (t ),[ L(π )T (t )]2 = T (2t ),[ L(π )T (t )]3 = L(π )T (3t ) ⋅ ⋅ ⋅
τ = a = 2t 是基本向量。对称操作有无穷多个。 螺旋轴中的一些对称操作包括在平移群T内。
续表:
特征对 晶胞类型 称元素 序 号 13 14 15 菱面体晶胞 点 熊夫里 斯记号 群 国际记号 对称元素
对称 晶 性的 高低 系 四 方
4
a=b≠c α = β = γ = 90 o
D2d
c4 v
4 mm
42m 422 mmm
4 ,4 m
4 ,2 2 ,2 m
4 , 4 2 ,5 m , i
3 + i = 3, 3 + mh = 6
4
2.晶体的宏观对称元素的组合与32个晶 体学点群
由上述的 8种独立的宏观对称元素按一定的规则 (即对称元素至少要通过一个公共点;组合时不能 出现 5次轴及大于6的对称轴)进行组合,总共有32 种组合形式,称为32个晶体学点群。晶体的宏观外 形不论形状如何,必属于这32个晶体学点群中的某 一个。
描述分子对称性与晶体宏观对称性所常用的对称 元素及相应的对称操作对照表
分子对称性 对称元素 符号 对称轴 Cn 对称面 对称操作 符号 晶体宏观对称性 对称元素 符号 旋转轴 n 反映面 或镜面 对称操作 符号 旋转 反映 倒反
ˆ 旋转 C
n
L(α )
M I
σ
反映 反演
ˆ σ
ˆ i
n
m
对称中心 i 象转轴
7.2 晶体的对称性
晶体的对称性有宏观对称性和微观对称系之 分。前者是指晶体的外形对称性,后者指晶体微 观结构对称性。
晶体对称性

r F ( r ′) 不变 对称物体 r r r 物体 F ( r ′ ) 的一个对称变化 g X = X ′ 相同
[ ]
对称变换的两种理解方法存在着内在的本质上的 联系。分析结构模型时,第一种较为方便; 在进行理论处理时,第二种更为适用。 推论: 1)对称物体必然包含等同部分(包括镜像等同 ); 2)对称变换的反变换也是对称变换。
第四章:晶体的对称性 § 4.2 空间变换
对应于两类四面体的重合过程就是两类基本的度规不变变换。 第一类变换(本征运动): 两个迭合等同四面体的重合过程。 定理一:任何第一类变换都可分解为平移和与之垂 直的转动的迭加(螺旋转动)。 第二类变换(非本征运动): 两个镜象等同四面体的重合过程。 定理二:任何第二类变换都可分解为镜象反射和与 之垂直的转动的迭加(反射转动)。
ABCD 的 A 沿 q 平移至 A ′′′,然后绕 N s转动α ,就与 A ′ B ′C ′D ′ 重合(位向相同,一点重合)。 q D A t s = 0 →简单转动 特例: C α = 0 →平移 Ns B t
s
O
A ′′′ p
α
A′ B′
D′
C′
定理二:总有一个反射转动能使镜像等同四面体重合
′ C C ′的中点作反射面m ; i) 过 A A ′、 BB、
ii)
A ′ B ′C ′D ′ 以 m 为镜面反射至 A ′′ B ′′C ′′D ′′,则 ′ C ′′ 到 m 面的距离相等; B ′、 A、 B、 C 到 m 面的距离分别与 A ′′、 D ′′ D C
A
B
C ′′ A ′′
D
C
A
B
第四章:晶体的对称性 § 4.2 空间变换
§1.5 晶体的对称性

(3)中心反映: 。 (3)中心反映:i。 中心反映
(4)镜象反映: 。 (4)镜象反映:m。 镜象反映
独立的对称操作有8种,即1,2,3,4,6,i,m, 4 。
或C1,C2,C3,C4,C6 ,Ci,Cs,S4。
三维实例: 三维实例:立方晶格
+中心反演 操作(24个) =48个对称 操作。
体对角线C (a)绕立方轴 4: (b)体对角线 3: (c)面对角线 2: (d)不动, a)绕立方轴C : 绕立方轴 体对角线 面对角线C 面对角线 )不动, 4个3度轴; 个 度轴; 度轴 个立方轴; 3个立方轴; 6个2度轴;有6 一个对称操 度轴; 个 度轴 作。 个对称操作。 个对称操作。 个对称操作。 个对称操作。 个对称操作 共9个对称操作。 8个对称操作。 个旋转对称操作。 共24个旋转对称操作。 个旋转对称操作
( x1 , x2 , x3 ) 变为 (− x1 ,− x2 ,− x3 )
′ x1 − x1 x′ x 2 = − 2 x′ − x 3 3
−1 0 0 A = 0 −1 0 0 0 − 1
A = −1
等腰梯形
不规则四边形
外的任何旋转都不能保持不变, 除2 π外的任何旋转都不能保持不变, 不存在反演不变的线。 不存在反演不变的线。
2.几何变换均为正交变换(保持两点距离不变) 2.几何变换均为正交变换(保持两点距离不变) 几何变换均为正交变换 经过某一对称操作,把晶体中任一点 X ( x1 , x2 , x3 ) 变为 经过某一对称操作,
1− 2cosθ=m,
2π θ = , n = 1, , , , 2346 n
晶体中允许的旋转对称轴只能是1, , , , 度轴 度轴。 晶体中允许的旋转对称轴只能是 ,2,3,4,6度轴。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x1
a11 a12 a13
A= a21 a22 a23
a31
a32
a33
(x1’,x2’,x
3’)
θ (x1,x2,x3)
α
x2
由于操作前后,两点间的距离保持不变,即
x1' 2 x2' 2 x3' 2 x12 x22 x32
而 x1'2 x2' 2 x3' 2 x2' x2' AxAx x AAx x12 x22 x32 xx
立方晶系:在立方晶胞4个方向体对角线上均有三重旋转轴 (a=b=c, α=β=γ=90)
六方晶系:有1个六重对称轴(a=b, α=β=90;, γ=120;)
四方晶系:有1个四重对称轴(a=b, α=β=γ=90;)
三方晶系:有1个三重对称轴(a=b, α=β=90;, γ=120;)
正交晶系:有3个互相垂直的二重对称轴或2个互相垂直的对 称面(α=β=γ=90;)
晶体中对称轴的度数常用不同的符号代表,如下表所示
对称轴度数的符号表
对称轴
2
3
4
6
的度数n
符号
▼
(b)n度旋转-反演轴 若绕某一固定轴u旋转2π/n角度以后,再经过中心反演(即x→ -x ,y → -y,z → -z),晶体能够自身重合,则称u为n度旋转-反演 轴 这。样的对称轴只有1,2,3,4,6度。为了区别于转轴,在轴的
1 0 0 A 0 1 0
0 0 1
(x1,x2,x3)
x2
(x1,x2,-x3)
A 1
2)基本的对称操作 (a)n度旋转对称轴
如果晶体绕某一对称轴旋转θ=2π/n以后自身能重合,则称 该轴为n度旋转对称轴。由于晶格周期性的限制,晶体可能的转 动讨论如下。
由于晶格的对称操作并不涉及到
单斜晶系:有1个二重对称轴或对称面(α=γ=90;)
三斜晶系:没有特征对称元素
设经过某个操作,把晶体中任一点x变为x´ ,该操作可以表 示为线性变换:
x3
x´j=∑ ajixi,(i,j=1,2,3)
式中
x=ix1+jx2+kx3
x´= ix1´+jx2´+kx3
若采用矩阵表示:
x´=Ax
其中
x’=
xx12''源自 x3'
x=
xx12
x3
x2 (sin
cos cos cos
sin )
x2 sin x2tg cos x2 sin x3 cos
则正交变换
xx12''
1 0
x3'
0
0
c os s in
0 sin
x1 x2
n = 1,|cosθ|=1/2, θ= π /3,2π/3,4 π /3,5 π /3;
n = 0, |cosθ|=0, θ= π /2,3π/2
因为顺时(或逆时)针转动4 π /3, 3π/2 ,5 π /3分别等价于 逆时(或顺时)针转动2 π /3, π/2 , π /3,所以晶格转动的 独立转角为: 2π ,π , 2π/3, π /2 , π /3 ;
度次上加“-”来表示旋转-反演轴。即1, 2, 3, 4, 6 。
1i 1
2
2m
1
1
2
3 3i
3
5
1 4
6 2
6=3+m
3 3
5 5
1
1
6
2' 2
6 4
4
4
3 1 3
1
2
4
2 4
A B
D C
H G
E
F
D
C
A
B
G
F
H
E
正四面体既无四度轴也无对称心,4 是基本的对称操作。
总上所述,晶体的宏观对称性中有以下八种的基本对称操作,即
1,2,3,4,6,i,m, 4 。
所有点对称操作都可由这8种操作或它们的组合来完成。一 个晶体的全部对称操作构成一个群,每个操作都是群的一个元素。 对称性不同的晶体属于不同的群。由旋转、中心反演、镜象和旋 转--反演点对称操作构成的群,全部对称要素相交于一点(晶体 中心),在进行对称操作时至少有一点不移动,称之为点群。
x3
(x1’,x2’,x
3’)
θ (x1,x2,x3)
α
x2
x1’= x1
x1
x2’=
c
x2
os
cos(
)
x2 (cos
cos sin cos
sin )
x2 cos x2tg sin x2 cos x3 sin
x3’=
x2
cos
sin(
)
cos x3
正交矩阵A为
1 0
0
A 0 cos sin
0 sin cos
A 1
(c)中心反演
取中心为原点,经过中心反演后,图形中任一点(x1,x2,x3) 变 为另一点( -x1,-x2,-x3),则变换关系如下
x1’= -x1, x2’=- x2, x3’ =- x3
(x1,x2,x3) 变为另一点( x1,x2,x3),即以x3=0面作为镜面。 则变换关系如下:
x1’= x1, x2’=x2, x3’ =- x3
x1
则正交变换
x1'
x
' 2
x3'
正交矩阵A为
1 0 0 1
0 0
x1
x2
0 0 1 x3
晶体的对称性
重点: 1)基本的对称操作; 2)宏观对称类型; 3)微观对称类型;
1.对称的概念 对称就是物体相同部分有规律的重复。此外,对称的图形还
必须符合另一个条件,那就是这些相同的部分,通过一定的对称 操作(如旋转、反映、镜面)可以发生重复;换句话说也就是相同的 部分通过一定的操作彼此可以重合起来,使图形恢复原来的形象。
则正交变换
xx12''
1 0
x3'
0
0 1 0
0 0 1
xx12
x3
正交矩阵A为
1 0 0 A 0 1 0
0 0 1
A 1
(d)镜像
x3
镜像对称操作是将图形的任一点
理论证明,所有晶体只有32种点群,即只有32种不同的点对 称操作类型。这种对称性在宏观上表现为晶体外形的对称及物理 性质在不同方向上的对称性。所以又称宏观对称性。
如果考虑平移,多出以下两类微观对称操作类型: n度 螺旋轴和滑移反映面。
根据晶体的对称性,按有无某种特征对称元素为标准,将晶体分 成7个晶系:
综合上述证明得: θ 2π ,n 1,2,3,4,6 n
晶体中允许的旋转对称轴只能是1,2,3,4,6度轴。
1
2
3
4
6
晶体中不存在5度或6度以上的转轴。 上述结果也可以直观的理解为:长方 形、正三边形、正方形、正六边形可 以在平面内周期性的重复排列,而不 留空隙,但正五边形却不能相互紧密 排列做重复排列而不留空隙,因此晶 体中不存在5度的转轴。
对称操作是指凭借对称要素能够使对称物体中的各个相同部分, 作有规律重复的变换动作。而对称要素则是指在进行对称操作时 所凭借的几何要素——点、线、面等。 2.晶体对称性的判定
由于晶体的自限性,使得晶体内部的原子的规则排列反映 在晶体的宏观形态上,晶体表现出对称性。
对于外表具有很多晶面的晶体,往往不能直接判别它的对 称特征,必须经过测角和投影以后,才可对它的对称规律进行 分析研究。通过对大量晶体进行测角和投影,归纳成32种典型 的宏观对称类型。由于在宏观对称类型,全部对称要素相交于 一点(晶体中心),在进行对称操作时至少有一点不移动,因此 称之为点群。
所以 x AAx xx
AA I
其中I是单位矩阵,所以得出A为正交矩阵。 如令 A 代表矩阵A的行列式,则得到
A A 1
又
A A
所以 A 2 1
A 1
(b)转动
将某一图形绕x1转过θ角,该图形 中任一点(x1,x2,x3)变为另一点 (x1’,x2’,x3’),则变换关系如下:
该点群中的对称操作中不包括平移。而若对称操作中包括平移, 共构成了230中微观的对称类型。所有以上的对称类型都源于以 下基本对称操作的组合。
3.基本的对称操作 1)简单对称操作的变换关系 (a)线性变换:
和刚体一样,晶格中任何两点间的距离,在操作前后应保 持不变,在数学上表示,这些操作就是熟知的线性交换。注意: 在讨论晶体问题时,一般应采用斜坐标系,但为方便起见,这里 采用直角坐标系,并不会影响结论的正确性。
晶体恢复到未转动时的状态,但此时B处格点转到B1点,则B1
处必为一格点。可以知道AB//A1B1,平行晶列具有相同的周期,
则 A1B1 na 2a | cos | A1
B1
| cos | n / 2 1
其中n为正整数或零 n = 2,|cosθ|=1, θ= π ,2π; A
θ
θ
O
B
B
晶格的平移,在操作时应至少保
A
持一点不同,所以采用双转轴来 推导晶体的旋转对称轴,存在一 定的局限性,应采用单转轴推导