车辆动力学模型
vtd 动力学模型

vtd 动力学模型VTD 动力学模型是一种用于描述和分析车辆运动行为的数学模型。
它基于车辆动力学原理,通过考虑车辆的质量、惯性、摩擦力等因素,来预测车辆在不同驾驶条件下的运动状态和行驶性能。
本文将详细介绍 VTD 动力学模型的原理和应用。
一、VTD 动力学模型的原理VTD(Vehicle Test Dynamic)动力学模型是一种基于物理原理的模型,它通过对车辆的力学特性进行建模,来模拟车辆的运动行为。
VTD 模型的核心是基于牛顿第二定律和运动学方程,结合车辆的质量、惯性、车轮力等参数,来描述车辆的加速度、速度和位置变化。
1. 车辆的加速度模型VTD 模型中,车辆的加速度可以通过考虑各种力的作用来计算。
其中,牵引力、阻力、制动力、侧向力等是影响车辆加速度的重要因素。
牵引力主要由车辆的发动机输出扭矩和传动系统的效率决定;阻力包括空气阻力、滚动阻力等,它们与车辆的速度和行驶状态有关;制动力与刹车系统的性能相关;侧向力主要由车辆的操控性能和轮胎的附着力决定。
2. 车辆的速度和位置模型在 VTD 模型中,车辆的速度和位置可以通过车辆的加速度和初始条件来计算。
根据牛顿第二定律和运动学方程,可以得到车辆速度和位置的变化规律。
通过积分计算,可以得到车辆在不同时间段内的速度和位置。
二、VTD 动力学模型的应用VTD 动力学模型在车辆工程领域有着广泛的应用。
下面将介绍几个典型的应用场景。
1. 车辆性能评估VTD 动力学模型可以用于评估车辆的加速性能、制动性能、悬挂系统性能等。
通过模拟车辆在不同驾驶条件下的运动行为,可以分析车辆的动力学特性,评估车辆的性能指标,并为改进车辆设计提供依据。
2. 驾驶辅助系统开发VTD 动力学模型可以用于开发和测试驾驶辅助系统,如车道保持系统、自适应巡航系统等。
通过模拟车辆的运动行为,可以评估驾驶辅助系统的控制策略和性能,验证系统的可靠性和安全性。
3. 燃料经济性分析VTD 动力学模型可以用于分析车辆的燃料经济性。
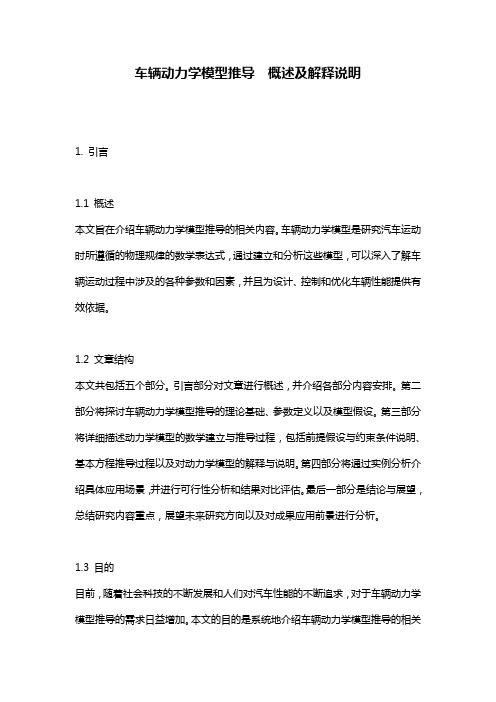
图一.七自由度车辆动力学模型

图一.七自由度车辆动力学模型纵向力平衡方程:()()cos ()sin x y xfl xfr yfl yfr xrl xrr m V r V F F F F F F δδ•-⋅=+-+++ ①侧向力平衡方程:()()sin ()cos y x xfl xfr yfl yfr yrl yrr m V r V F F F F F F δδ•+⋅=+++++ ②绕Z 轴力矩平衡方程:12[()sin ()cos ][()cos ()sin ]2()()2w z xfl xfr yfl yfr xfr xfl yfl yfr w xrr xrl yrl yrr t I r F F F F a F F F F t F F F F b δδδδ•⋅=++++-+-+--+ ③四个车轮的力矩平衡方程:tw w xi bi di I R F T T i w •⋅=-⋅-+ ④上述方程中:δ为前轮转角;Vx ,Vy 分别为纵向、横向车速;β为质心侧偏角;γ为横摆角速度;Fxi 、Fyi 、Fzi 分别为轮胎纵向力、侧向力、垂向力;i=左前轮fl 、右前轮fr 、左后轮rl 、右后轮rr ,为分别对应的车轮;m 为整车质量;ms 为悬挂质量;a 、b 为前后轴到质心的距离;l=a+b 为前后轴距;tw1为前轴轮距;tw2为后轴轮距; Iz 为整车绕Z 轴的转动惯量;hg 为质心到地面的距离;各轮胎垂向载荷公式:_1_1_1_122222222gg z fl x y w gg z fr x y w gg z rl x y w gg z rr x y w h h b b F mg mV mV l l t l h h b b F mg mV mV l l t lh h aa F mg mV mV l l t lh h a a F mg mV mV l l t l••••••••=--⋅=-+⋅=+-⋅=++⋅⑤各轮胎侧偏角公式:11222222arctan()arctan()arctan()arctan()wwww y fl t x y fr t x y rl t x y rr t x V arV rV arV rV brV rV br V rαδαδαα+=--+=-+-=---=-+ ⑥各车轮轮心在车轮坐标系下的纵向速度:1_1_2_2_()cos ()sin 2()cos ()sin 222w t fl x y w t fr x y w t rl x w t rr x t V V r V ar tV V r V ar t V V rtV V rδδδδ=-++=+++=-=+ ⑦其中_t fl V 、_t fr V 、_t rl V 、_t rr V 为轮胎坐标系下的轮胎纵向速度。
汽车二自由度动力学模型

汽车二自由度动力学模型
汽车二自由度动力学模型是一种用于描述汽车运动的简化模型。
它考虑了两个自由度,通常是车辆的纵向(前进方向)和侧向(横向)运动。
在这个模型中,车辆被视为一个质量集中的刚体,通过两个自由度来描述其运动状态。
这两个自由度通常是车辆的速度(纵向)和横摆角速度(侧向)。
汽车二自由度动力学模型的建立基于一些基本的物理原理,如牛顿第二定律、动量守恒定律和刚体动力学。
通过对这些原理的应用,可以得到描述车辆运动的微分方程。
这些方程通常包括车辆的加速度、驱动力或制动力、转向力矩以及车辆的惯性参数等。
通过求解这些微分方程,可以预测车辆在不同工况下的运动响应,例如加速、制动、转弯等。
汽车二自由度动力学模型在车辆动力学研究、驾驶模拟器、自动驾驶系统等领域有广泛应用。
它可以帮助工程师和研究人员了解车辆的基本运动特性,评估车辆的操控稳定性、行驶安全性等方面的性能。
然而,需要注意的是,二自由度模型是一种简化的模型,它忽略了许多实际情况中的复杂因素,如悬挂系统、轮胎特性、空气动力学等。
在实际应用中,可能需要使用更复杂的多自由度模型或考虑更多的因素来更准确地描述汽车的运动。
总的来说,汽车二自由度动力学模型提供了一个简单而有用的工具,用于初步研究和理解汽车的运动行为,但在具体应用中,需要根据实际需求进行适当的修正和扩展。
如果你对汽车动力学模型有更深入的问题或需要进一步的讨论,我将很愿意提供帮助。
车辆动力学模型推导__概述及解释说明
车辆动力学模型推导概述及解释说明1. 引言1.1 概述本文旨在介绍车辆动力学模型推导的相关内容。
车辆动力学模型是研究汽车运动时所遵循的物理规律的数学表达式,通过建立和分析这些模型,可以深入了解车辆运动过程中涉及的各种参数和因素,并且为设计、控制和优化车辆性能提供有效依据。
1.2 文章结构本文共包括五个部分。
引言部分对文章进行概述,并介绍各部分内容安排。
第二部分将探讨车辆动力学模型推导的理论基础、参数定义以及模型假设。
第三部分将详细描述动力学模型的数学建立与推导过程,包括前提假设与约束条件说明、基本方程推导过程以及对动力学模型的解释与说明。
第四部分将通过实例分析介绍具体应用场景,并进行可行性分析和结果对比评估。
最后一部分是结论与展望,总结研究内容重点,展望未来研究方向以及对成果应用前景进行分析。
1.3 目的目前,随着社会科技的不断发展和人们对汽车性能的不断追求,对于车辆动力学模型推导的需求日益增加。
本文的目的是系统地介绍车辆动力学模型推导的相关理论和方法,以帮助读者更好地理解和应用这些模型。
此外,通过实例分析与应用场景探讨,也旨在展示动力学模型在实际问题中的应用价值,并提供未来研究方向和成果应用前景的思考。
2. 车辆动力学模型推导:2.1 理论基础:车辆动力学是研究车辆在不同路况条件下的运动规律的一门学科。
它主要涉及到车辆的加速度、速度和位移等运动参数。
在车辆动力学模型推导中,我们需要建立一组数学方程来描述车辆运动的规律性和物理特性。
2.2 动力学参数定义:在推导车辆动力学模型之前,首先需要定义一些重要的参数。
这些参数包括车辆质量、惯性矩阵、轮胎摩擦系数以及驱动力等。
这些参数对于建立准确的车辆动力学模型非常重要,并且可以通过实验或者工程估算得到。
2.3 模型假设:在推导车辆动力学模型时,通常会做出一定的假设,以简化问题并减少计算复杂度。
例如,我们可能会假设车辆是刚体、忽略空气阻力、平均考虑轮胎与地面之间的接触等。
商用车车辆开发动力学模型

商用车车辆开发动力学模型1. 引言随着科技的进步和交通运输行业的发展,商用车车辆的开发与设计面临着越来越高的要求。
为了满足这些要求,开发出更加高效、安全和环保的商用车,动力学模型在车辆设计中的作用越来越重要。
本文将深入探讨商用车车辆开发动力学模型的基本原理、特性、开发流程、验证与评估以及应用场景与优势。
2. 动力学模型的基本原理动力学模型是一种数学模型,用于描述物体运动的状态和行为。
在车辆动力学中,这种模型被用来模拟和分析车辆在不同工况下的运动特性,包括纵向、横向和横摆运动等。
基于牛顿第二定律和相关运动学关系,动力学模型能够预测车辆在不同路面条件、行驶状态和外部干扰下的响应。
3. 商用车车辆动力学特性商用车,如重型卡车和大型客车,具有独特的动力学特性。
这些特性包括较大的质量、较高的重心位置、复杂的悬挂系统和特定的驾驶室布局等。
这些因素都显著影响着商用车在行驶过程中的稳定性、操纵性和乘坐舒适性。
因此,在建立商用车动力学模型时,必须充分考虑这些特性。
4. 模型的开发流程开发商用车车辆动力学模型通常遵循以下步骤:首先,通过实验和测量获取车辆的详细参数,包括质量、质心位置、转动惯量等;其次,基于这些参数和车辆的运动方程建立数学模型;随后,通过编程实现模型,并进行初步验证;最后,通过实车试验对比模型预测与实际表现,进行必要的调整和优化。
5. 模型的验证与评估模型的验证与评估是确保其准确性和可靠性的关键环节。
这通常涉及到对比模型的预测结果与实际测试数据。
评估指标包括预测的准确性、稳定性以及与实际工况的符合程度等。
在评估过程中,还需要对模型在不同工况下的表现进行充分测试,以确保其在各种情况下的可靠性。
6. 模型的应用场景与优势商用车车辆开发动力学模型的应用场景广泛,主要包括新车型的开发与设计、现有车型的改进与优化以及智能化控制等。
在开发阶段,模型能够预测新车型的性能表现,为设计决策提供依据;在优化阶段,通过对模型的调整和改进,可以显著提高现有车型的性能;在智能化控制方面,动力学模型为自动驾驶、智能导航和车辆协同提供了强大的支持。
车辆动力学模型 python

车辆动力学模型python车辆动力学模型是描述车辆运动状态变化的数学模型。
在车辆动力学模型中,常见的模型包括简化的自行车模型、单轮模型、两轮车模型、四轮车模型等。
以下是一个简化的两轮车辆动力学模型的Python示例代码:pythonimport mathimport numpy as npimport matplotlib.pyplot as plt# 车辆参数m = 1000 # 质量(kg)Iz = 1000 # 车辆绕Z轴的转动惯量(kg*m^2)lf = 1.1 # 车辆重心到前轴的距离(m)lr = 1.2 # 车辆重心到后轴的距离(m)Caf = 80000 # 前轴轮胎的纵向刚度(N/rad)Car = 120000 # 后轴轮胎的纵向刚度(N/rad)Vx = 10 # 车辆前进速度(m/s)# 初始状态X0 = 0Y0 = 0Psi0 = 0del0 = 0beta0 = 0def two_wheeled_vehicle_model(x, t):# 状态变量X, Y, Psi, del_, beta = x# 计算车辆参数Faf = Caf * math.atan2((beta + lf * Psi), Vx)Far = Car * math.atan2((beta - lr * Psi), Vx)# 计算状态变化率X_dot = Vx * math.cos(Psi + beta)Y_dot = Vx * math.sin(Psi + beta)Psi_dot = Vx * math.sin(beta) / lrdel_dot = 0 # 假设方向盘转角保持不变beta_dot = (lf * Faf * math.cos(del_) - lr * Far) / (m * Vx) - Psi_dot return [X_dot, Y_dot, Psi_dot, del_dot, beta_dot]# 模拟车辆运动T = np.arange(0, 10, 0.01) # 时间范围X = np.zeros(len(T)) # X坐标Y = np.zeros(len(T)) # Y坐标Psi = np.zeros(len(T)) # 车辆航向角del_ = np.zeros(len(T)) # 方向盘转角beta = np.zeros(len(T)) # 滑移角# 设置初始条件X[0] = X0Y[0] = Y0Psi[0] = Psi0del_[0] = del0beta[0] = beta0# 模拟车辆运动for i in range(1, len(T)):# 使用Euler方法(欧拉方法)进行数值积分x = [X[i-1], Y[i-1], Psi[i-1], del_[i-1], beta[i-1]] dx = two_wheeled_vehicle_model(x, T[i-1])X[i] = X[i-1] + dx[0] * (T[i] - T[i-1])Y[i] = Y[i-1] + dx[1] * (T[i] - T[i-1])Psi[i] = Psi[i-1] + dx[2] * (T[i] - T[i-1])del_[i] = del_[i-1] + dx[3] * (T[i] - T[i-1])beta[i] = beta[i-1] + dx[4] * (T[i] - T[i-1])# 绘制车辆轨迹plt.plot(X, Y)plt.xlabel('X')plt.ylabel('Y')plt.title('Vehicle Trajectory')plt.axis('equal') # 保持坐标轴比例一致plt.show()这个示例代码使用欧拉方法对车辆动力学模型进行数值积分,模拟车辆在一段时间内的运动轨迹,并绘制出车辆的轨迹图。
二自由度车辆动力学模型
二自由度车辆动力学模型一自由度车辆动力学模型和二自由度车辆动力学模型是当前车辆动力学研究的重要部分。
一自由度车辆动力学模型只有一个转动扭矩,而二自由度车辆动力学模型则是加入了驱动车辆惯性转动扭矩和启动车辆非惯性转动扭矩。
在安全驾驶领域,二自由度车辆动力学模型可以更准确地模拟真实车辆的驾驶行为,这在事故分析和行车安全方面具有重要意义。
二自由度车辆动力学模型描述了建立汽车动力学模型所必需的参数,这些参数表征了汽车的运动特性。
根据不同的车辆结构,二自由度车辆动力学模型可以分为简化模型和综合模型,其中简化模型只包括车辆惯性特性和质量结构,而综合模型则需要将不同的惯性项和质量参数、转向设置参数和车轴系数包含在动力学模型中。
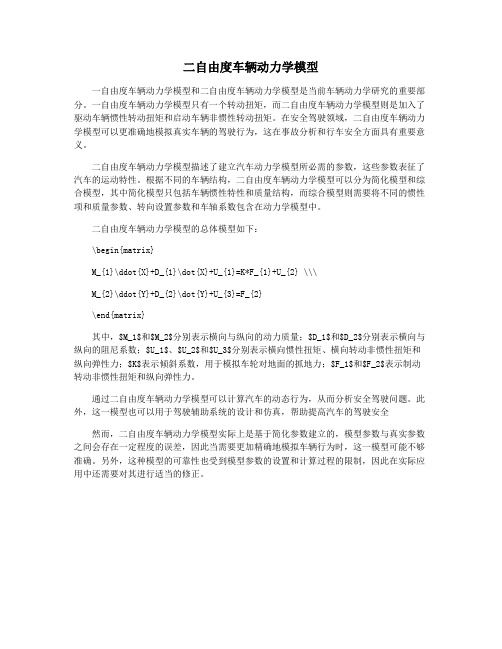
二自由度车辆动力学模型的总体模型如下:\begin{matrix}M_{1}\ddot{X}+D_{1}\dot{X}+U_{1}=K*F_{1}+U_{2} \\\M_{2}\ddot{Y}+D_{2}\dot{Y}+U_{3}=F_{2}\end{matrix}其中,$M_1$和$M_2$分别表示横向与纵向的动力质量;$D_1$和$D_2$分别表示横向与纵向的阻尼系数;$U_1$、$U_2$和$U_3$分别表示横向惯性扭矩、横向转动非惯性扭矩和纵向弹性力;$K$表示倾斜系数,用于模拟车轮对地面的抓地力;$F_1$和$F_2$表示制动转动非惯性扭矩和纵向弹性力。
通过二自由度车辆动力学模型可以计算汽车的动态行为,从而分析安全驾驶问题。
此外,这一模型也可以用于驾驶辅助系统的设计和仿真,帮助提高汽车的驾驶安全然而,二自由度车辆动力学模型实际上是基于简化参数建立的,模型参数与真实参数之间会存在一定程度的误差,因此当需要更加精确地模拟车辆行为时,这一模型可能不够准确。
另外,这种模型的可靠性也受到模型参数的设置和计算过程的限制,因此在实际应用中还需要对其进行适当的修正。
高速列车车辆动力学模型与仿真
高速列车车辆动力学模型与仿真随着科技的不断进步,高速列车已经成为现代交通运输的重要组成部分。
高速列车的设计和运行必须经过严格的测试和仿真,以确保其安全性、稳定性和可靠性。
在这个过程中,车辆动力学模型和仿真技术起到了至关重要的作用。
本文将介绍高速列车车辆动力学模型的基本原理和仿真技术的应用。
一、高速列车车辆动力学模型的基本原理1. 刚体动力学模型高速列车可以近似地看作是一个刚体系统,因此刚体动力学模型是描述高速列车运动的基本原理。
刚体动力学模型基于牛顿的力学定律,通过分析列车各个部件之间的力学关系,可以推导出列车的运动方程。
这些方程可以描述列车的加速度、速度和位移与力的关系,从而揭示出列车的整体运动特性。
2. 多体系统模型除了刚体动力学模型外,高速列车还可以被看作是一个多体系统。
多体系统模型考虑了列车车体、轮轴、车轮等多个部件之间的运动关系,精确地描述了列车的动力学行为。
根据刚体动力学模型的基础上,多体系统模型进一步考虑了车体的变形和部件间的相互作用,使得列车的仿真结果更加准确和可靠。
3. 车辆-轨道相互作用在高速列车的运行过程中,车辆与轨道之间的相互作用是不可忽视的。
车辆-轨道相互作用模型考虑了列车与轨道之间的接触、摩擦和力的传递等因素,进一步提高了仿真结果的准确性。
通过车辆-轨道相互作用模型,可以模拟列车在不同运行条件下的动力学特性,包括转向性能、悬挂系统动态响应等。
二、高速列车车辆动力学模型的仿真技术应用1. 系统分析和设计优化高速列车车辆动力学模型的仿真技术可以用于系统分析和设计优化。
通过建立准确的车辆动力学模型,可以对列车的运行性能进行全面评估,包括加速度、速度、稳定性等方面。
仿真结果可以提供给设计师,用于优化列车的结构和参数,以满足运行要求和乘客舒适度等方面的需求。
2. 运行条件预测和评估高速列车的安全运行需要对各种运行条件进行预测和评估。
仿真技术可以模拟不同的运行条件,包括曲线行驶、坡道行驶、刹车等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轨道交通学院现代车辆研究所 2014年6月7号
➢轮对建模 ➢轴箱建模 ➢转向架建 ➢车体建模 ➢在线积分
目录
Page ▪ 2
2
动力学简化模型
Page ▪ 3
3
轮对建模
轮对质量 侧滚转动惯量 点头转动惯量 摇头转动惯量 踏面形状 车轮滚动圆直径
1567 739 114 750
kg.m^2
点头转动惯量 501000
kg.m^2
摇头转动惯量 449000
kg.m^2
重心到轨面高度 2094
mm
Page ▪ 8
8
6
转向架建模
2、轮对装配,定义一二系力
构架质量 轴距 转向架中心距 摇头转动惯量 运行速度 二系横向跨距 二系弹簧垂向 刚度
1567 2500 8500 750 80 2120
.3
kg mm mm kg.m^2 km/h mm
KN/m
Page ▪ 7
7
车体建模
车体质量
25.12
t
侧滚转动惯量 97000
840
kg kg.m^2 kg.m^2 kg.m^2 LMA mm
Page ▪ 4
4
轴箱建模
轴箱质量 侧滚转动惯量 点头转动惯量 摇头转动惯量
164.9 2.5 5.5 4.3
kg kg.m^2 kg.m^2 kg.m^2
Page ▪ 5
5
转向架建模
1、构架外形尺寸确定
Page ▪ 6 注:构架的外形尺寸不影响其动力学性能