车辆动力学(8)- 传动系统动态建模
车辆动力学建模与仿真技术及应用(可编辑)
车辆动力学建模与仿真技术及应用(可编辑)车辆动力学建模与仿真技术及应用现代汽车底盘设计与性能开发技术高级研讨班讲义现代汽车底盘设计与性能开发技术高级研讨班讲义车辆动力学建模与仿真技术车辆动力学建模与仿真技术车辆动力学建模与仿真技术车辆动力学建模与仿真技术及在汽车底盘设计开发中的应用及在汽车底盘设计开发中的应用詹军吉林大学汽车动态模拟国家重点实验室吉林大学汽车动态模拟国家重点实验室吉林大学汽车动态模拟国家重点实验室 ADSL of JLU主主讲人讲人讲人讲人詹詹军博博士教授教授工作单位工作单位吉林大学汽车动态模拟国家重吉林大学汽车动态模拟国家重点实验室通讯地址通讯地址吉林省长春市人民大街吉林省长春市人民大街59885988号号邮政编码邮政编码1XXXXXXXXXX5Emailzhanjcom电话电话1XXXXXXXXXX吉林大学汽车动态模拟国家重点实验室 ADSL of JLU主主要内容要内容要内容要内容先先进汽车底盘汽车底盘开发流发流程20082008版车辆动力学术语解读版车辆动力学术语解读品质车辆动力学建模方法车辆动力学仿真技术车辆动力学在底盘设计开发中的应用实例车辆动力学在底盘设计开发中的应用实例吉林大学汽车动态模拟国家重点实验室 ADSL of JLU一先进汽车底盘开发流程一先进汽车底盘开发流程吉林大学汽车动态模拟国家重点实验室 ADSL of JLU先进汽车底盘开发流程图先进汽车底盘开发流程图先进汽车底盘开发流程图先进汽车底盘开发流程图PPS 产品规划概念设计概念设计定型试装试验检验产前 SOP旖迈谠调连恗发谣CV 谠调发谣DV 鈱伉发谣PV伉唣导享昛梪谦余谠调发谣剨柲豥梃悝扲谠调悝扲谠调基于总成基于总成基于总成结基于总成结特性车辆特性车辆特性车辆特性车辆构车辆动力构车辆动力构车辆动力构车辆动力靘佘谠调动力学模动力学模学模型学模型型型-60 -56 -52 -48 -42 -36 -30 -27 -24 -19 -12 -8 -6 -3 0 3调研深入研究决策准备设计整合项目计划试装试验检验量产前期量产前期开发量产开发工业化吉林大学汽车动态模拟国家重点实验室 ADSL ofJLU二二20082008版版SAE J670SAE J670解读解读吉林大学汽车动态模拟国家重点实验室 ADSL of JLUSAE J670 V002SAE J670 V0022008年1月发布了SAE J670 V002发展了1976年的年的V001V001Axis and Coordinate SystemsVehicleSuspension and SteeringBrakesTires and WheelsStates and ModesInputs and ResponsesVehicle Longitudinal ResponseVehicle Lateral ResponseRide Vibration吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUcom Axis and Coordinate SAxis and Coordinate Syyyystemsstems 轴和坐标系轴和坐标系吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUAxis and Coordinate SystemsAxis and Coordinate Systems Inertial Reference Vehicle Plane of惯性坐标系SymmetryAxis System 车辆对称面轴系轴系Coordinate System坐标系坐标系Ground Plane地平面地平面Road Surface路面路面Road Plane道路平面道路平面轮胎印轮胎印迹平面吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUAxis and Coordinate SystemsAxis and Coordinate Systems Earth-Fixed Tire CoordinateCoordinate System System地面固定坐标系地面固定坐标系轮胎坐标系轮胎坐标系Vehicle Coordinate Wheel CoordinateSystemSystem SystemSystem车辆坐标系车轮坐标系VehicleVehicle ReferenceReferencePoint车辆参考点吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUAxis and Coordinate SystemsAxis and Coordinate Systems 吉林大学汽车动态模拟国家重点实验室 ADSL of JLUcom22 VEHICLEVEHICLEVEHICLEVEHICLE车辆车辆吉林大学汽车动态模拟国家重点实验室 ADSL of JLU Geometry and MassesGeometry and MassesWheelbase L 轴距车辆静止在水平面上时在规定载荷下方向盘转角为零度度设定车辆高和悬架高度设定车辆高和悬架高度在平行于在平行于X轴上测量的轴上测量的车车辆同侧轮胎接地点中心的距离TrackTrack Track Track WidthWidth WheelWheel Track Track TT 轮距轮距车辆静止在水平面上在规定载荷下设定车辆高度或悬架高度同架高度同一车轴上两个轮胎的接地点中心的平行于车轴上两个轮胎的接地点中心的平行于YY 轴方轴方向的距离再测量对于双轮车辆内外侧轮胎接地中心中点的距离吉林大学汽车动态模拟国家重点实验室 ADSLof JLUGeometry and MassesGeometry and Masses UnsprungUnsprung WeightWeight Unsprung Unsprung Mass Mass 非簧载质量非簧载质量one-half the weight of the suspension linkage ride sppringgs and driveshaftsSprung Weight Sprung Mass 簧载质量BaseBase VehicleVehicle MassMass 基本车重基本车重Curb Mass 整备质量PayloadPayload 预载预载Vehicle Operating Mass 车辆实际质量PPassenger MMass 68 68 kkg 乘乘员员质量质量吉林大学汽车动态模拟国家重点实验室ADSL of JLUGeometry and MassesGeometry and MassesVehicle Center of Gravityy CG 车辆车辆重心Sprung-Mass Center of Gravity 簧载质量重心MassMass MomentsMoments ofof InertiaInertia 质量转动惯量质量转动惯量Vehicle Roll Moment of Inertia车辆侧倾转动惯量车辆侧倾转动惯量Vehicle Pitch Moment of Inertia车辆俯仰转动惯量Vehicle Yaw Moment of Inertia车辆横摆转动惯量Vehicle Roll-Yaw Product of Inertia车辆侧倾-横摆的转动惯量吉林大学汽车动态模拟国家重点实验室ADSL of JLUKinematicsKinematicsVelocities 速度AccelerationsAccelerations 加速度加速度Angular Motion Variables 角加速度Vehicle Euler Angles ψ θ φ 车辆欧拉角吉林大学汽车动态模拟国家重点实验室 ADSL of JLUForces and MomentsForces and Moments Longitudinal Force FX纵向力LateralLateral ForceForce FYFY 侧向力侧向力Vertical Force FZ 垂直力Roll Moment MX 侧倾力矩PitchPitch MomentMoment MYMY 俯仰力矩俯仰力矩Yaw Moment MZ 横摆力矩吉林大学汽车动态模拟国家重点实验室 ADSLof JLU23 SUSPENSION AND STEERING23 SUSPENSION AND STEERING 悬架与转向吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSuspensionSuspensionIndependentIndependent SuspensionSuspension 独立悬架独立悬架Solid-Axle Suspension 非独立悬架Suspension Corner 转向悬架非独立悬架非独立悬架独立悬架独立悬架吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSuspension ComponentsSuspension ComponentsAxle 车轴Ball Joint 球形接头Bushing 衬套Control Arm Wishbone 摆臂Damper 减震器Jounce Stop Jounce Bumper Bump Stop 上缓冲块Rebound Stop 下缓冲块吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSuspension ComponentsSuspension ComponentsKnuckle HubKnuckle Hub CarrierCarrier Upright Upright转向节转向节Link 连杆RideRide SpringSpring 弹簧弹簧Stabilizer Bar Anti-Roll Bar Anti-Sway Bar 横向稳定器TrackTrack BarBar Panhard Panhard Rod Rod 横拉杆横拉杆吉林大学汽车动态模拟国家重点实验室 ADSL of JLUSteering ComponentsSteering ComponentsSteering Wheel Hand Wheel 方向盘Steering Column 转向柱管Intermediate Shaft 中间轴中间轴Steering Gear 转向器RackRack andand PinionPinion SteeringSteering GearGear 齿轮齿条式转向器齿轮齿条式转向器Recirculating-Ball Steering Gear 循环球式转向器吉林大学汽车动态模拟国家重点实验室ADSL of JLUSteering ComponentsSteering ComponentsSteering Linkage 转向传动机构TiTie RRodd 转向横拉杆转向横拉杆Steer Arm Knuckle Arm 转向节臂吉林大学汽车动态模拟国家重点实验室ADSL of JLUSUSPENSION AND STEERINGSUSPENSION AND STEERING MassesMasses andand InertiasInertias 质量与惯量质量与惯量Unsprung-Mass Center of Gravity 簧下质量重心Unsprung-Mass Moments of Inertia 簧下质量转动惯量Sppin Moment of Inertia 转动惯量Steer Moment of Inertia 转向惯量吉林大学汽车动态模拟国家重点实验室 ADSL of JLU SUSPENSION AND STEERINGSUSPENSION AND STEERING Geometryy 几何Steer and Camber Angles 转向角与外倾角ReferenceReference SteerSteer AngleAngle 参考转向角参考转向角Ackermann Wheel Steer Angle 阿克曼转向角MeanMean ReferenceReference SteerSteerAngleAngle 平均参考转向角平均参考转向角Included Reference Steer Angle 前后轴平均参考转向角之差之差Included Ackermann Steer Angle 前后轴阿克曼转向角之差差Toe Angle 前束角CamberCamber AngleAngle 外倾角外倾角吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSUSPENSION AND STEERINGSUSPENSION AND STEERING吉林大学汽车动态模拟国家重点实验室 ADSL of JLU SUSPENSION AND STEERINGSUSPENSION AND STEERING吉林大学汽车动态模拟国家重点实验室 ADSL of JLU SUSPENSION AND STEERINGSUSPENSION AND STEERING Steering-Axis Geometry 主销轴线几何Steering Axis Kingpin Axis 主销轴线Caster Angle 主销后倾角Caster Offset at Wheel Center Spindle Trail轮心后倾拖距Caster Offset at Ground Caster Trail地面后倾拖距吉林大学汽车动态模拟国家重点实验室ADSL of JLUSUSPENSION AND STEERINGSUSPENSION AND STEERING Steering-Axis Geometry 主销轴线几何Steering-Axis Inclination Angle Kingpin Inclination Angle 主销内倾角Steering-Axis Offset at Wheel Center Kingpin Offset at Wheel Center 主销轴线在轮心处偏移Steering-Axis Offset at Ground Kingpin Offset at Ground Scrub Radius 内倾拖距Spindle Length 主轴有效轴有效长度度吉林大学汽车动态模拟国家重点实验室ADSL of JLUSUSPENSION AND STEERINGSUSPENSION AND STEERING Suspension Motions 悬架架运动JouJouncece Co Comppressessioon Buump p 压缩压缩Rebound Extension Droop 回弹SuspensionSuspension RideRide悬架跳动悬架跳动Suspension Roll 悬架侧倾Suspension Ride Displacement 悬架跳动位移Susppension Roll Anggle 悬架侧倾角悬架侧倾角吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUSUSPENSION AND STEERINGSUSPENSION AND STEERING Kinematics Ride Kinematics 跳动跳动运动学动学Front- Rear- View Swing Center车轮跳动时车轮中心轨迹在yz平面的瞬心Front- Rear- View Swing-Arm Length瞬心到车轮中心或轮胎接地点在yz平面的距离Front- Rear- View Swing-Arm Angle瞬心与车轮中心或接地中心连线在yz平面与y轴的夹角吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUSUSPENSION AND STEERINGSUSPENSION AND STEERINGKinematics Ride Kinematics 跳动跳动运动学动学Side-View Swing Center车轮跳动时车轮中心轨迹在xz平面的瞬心Side-View Swing-Arm Length瞬心到车轮中心或轮胎接地点的在xz平面的距离Side-View Swing-Arm Angle瞬心与车轮中心或接地中心连线在xz平面与y轴的夹角吉林大学汽车动态模拟国家重点实验室 ADSL of JLUSUSPENSION AND STEERINGSUSPENSION AND STEERINGKinematics Ride Kinematics 跳动运动学Suspension Ride Camber 悬架跳动外倾角变化Suspension Ride Camber Gradient 悬架跳动外倾角变化梯度Suspension Ride Caster 悬架跳动后倾角变化Susppension Ride Caster Gradient 悬架跳动后倾角变化梯度Suspension Ride Toe 悬架跳动前束角变化Susppension Ride Toe Gradient 悬架跳动架跳动前束角变化梯度束角变化梯度Suspension Ride Steer 悬架跳动转向角变化Susppension Ride Steer Gradient 悬架跳动转向角变化梯度悬架跳动转向角变化梯度Ride Track Change 悬架跳动轮距变化RideRide TrackTrack ChangeChange GradientGradient 悬架跳动轮距变化梯度悬架跳动轮距变化梯度吉林大学汽车动态模拟国家重点实验室 ADSL of JLUSUSPENSION AND STEERINGSUSPENSION AND STEERINGKinematics Roll Kinematics 侧倾运动学Suspension Roll Camber 悬架侧倾外倾角变化Suspension Roll Camber Gradient 悬架侧倾外倾角变化梯度SSuspensiion RRollll IInclilinatition 悬架侧倾内倾角变化悬架侧倾内倾角变化Suspension Roll Inclination Gradient悬架侧倾内倾角变化梯度SuspensionSuspension RollRoll CasterCaster 悬架侧倾后倾角变化悬架侧倾后倾角变化Suspension Roll Caster Gradient 悬架侧倾后倾角变化梯度SuspensionSuspension RollRoll SteerSteer 悬架侧倾转向角变化悬架侧倾转向角变化Suspension Roll Steer Gradient 悬架侧倾转向角变化梯度RollRoll CenterCenter 侧倾中心侧倾中心Roll Center Height 侧倾中心高度Roll Axis 侧倾轴线侧倾轴线吉林大学汽车动态模拟国家重点实验室 ADSL of JLUSUSPENSION AND STEERINGSUSPENSION AND STEERINGKinematics Steering Kinematics 转向运动学Steer Camber 转向外倾角变化Steer Camber Gradient 转向外倾角变化梯度StSteer CCastter 转向后倾角变化转向后倾角变化Steer Caster Gradient 转向后倾角变化梯度AckermannAckermann GeometryGeometry 阿克曼转向几何阿克曼转向几何Ackermann Error 阿克曼转向误差SteeringSteering RatioRatio 转向系传动比转向系传动比Overall Steering Ratio 转向系总传动比GearGear RatioRatio 转向器传动比转向器传动比Linkage Ratio 转向机构传动比C-Factor Rack Ratio Rack Sppeed 小齿轮传动小齿轮传动比吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSUSPENSION AND STEERINGSUSPENSION AND STEERINGKinematics Anti- CharacteristicsAnti-Dive front 抗点头BrakingBraking AntiAnti-LiftLift 制动抗后仰制动抗后仰Acceleration Anti-Lift front 加速抗前仰AntiAnti-SquatSquat 抗后蹲抗后蹲Anti-Roll 抗侧倾吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSUSPENSION AND STEERINGSUSPENSION AND STEERINGRide and Roll Stiffness 乘乘适刚度与侧倾刚度刚度与侧倾刚度Ride Rate 乘适刚度SuspensionSuspension RideRide RateRate Wheel Wheel Rate Rate 悬架乘适刚度悬架乘适刚度Roll Stiffness Roll Rate 侧倾刚度SuspensionSuspension RollRoll StiffnessStiffness Suspension Suspension RollRoll Rate Rate悬架侧倾刚度VehicleVehicle RollRoll StiffnessStiffness 整车侧倾刚度整车侧倾刚度Roll Stiffness Distribution 侧倾刚度分配吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSUSPENSION AND STEERINGSUSPENSION AND STEERINGComppliances Camber and Steer Comppliances柔度车轮外倾弹性与转向弹性ComplianceCompliance CamberCamber 弹性外倾角弹性外倾角Camber Compliance Compliance CamberCoefficient Coefficient 弹性外倾系数弹性外倾系数Compliance Steer 弹性转向角SteerSteer ComplianceCompliance Compliance Compliance SteerSteer Coefficient Coefficient弹性转向系数吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSUSPENSION AND STEERINGSUSPENSION AND STEERINGComppliancesLateral Compliance at the Wheel Center轮心处侧向弹性轮心处侧向弹性Lateral Compliance at the Contact Center轮胎接地中心的侧向弹性轮胎接地中心的侧向弹性Longitudinal Compliance 纵向弹性WindupWindup ComplianceCompliance 回转弹性回转弹性Axle Windup Compliance 轴回转弹性吉林大学汽车动态模拟国家重点实验室 ADSL of JLU24 BRAKES24 BRAKES制动器制动器吉林大学汽车动态模拟国家重点实验室 ADSL of JLUBRAKESBRAKESFriction Brake 摩擦制摩擦制动器RegenerativeRegenerative BrakeBrake 再生制动器再生制动器Disc Brake 盘式制动器Drum Brake 鼓式制动器AntiAnti--LockLock BrakeBrake SystemSystem 防抱死刹车系统防抱死刹车系统Brake Pressure 制动压力Brake Torque 制动力矩吉林大学汽车动态模拟国家重点实验室 ADSL of JLUBRAKESBRAKESBrake CompponentsBrake Pedal 制动踏盘MasterMaster CylinderCylinder 制动主缸制动主缸Proportioning Valve 比例阀BrakeBrake CaliperCaliper 制动钳制动钳Wheel Cylinder 制动轮缸FrictionFriction MaterialMaterial Brake BrakeLining Lining 制动衬片制动衬片Brake Pad 制动衬块BrakeBrake ShoeShoe 制动蹄制动蹄Brake Rotor Brake Disc 制动盘BrakeBrake DrumDrum 制动鼓制动鼓吉林大学汽车动态模拟国家重点实验室ADSL of JLUBRAKESBRAKESBrake Propportioningg 制动力分配制动力分配Brake Balance 制动平衡FixedFixed ProportioningProportioning 固定比值制动力分配固定比值制动力分配Variable Proportioning 变比值制动力分配吉林大学汽车动态模拟国家重点实验室 ADSL of JLU25 TIRES AND WHEELS25 TIRES AND WHEELS轮胎和车轮轮胎和车轮轮胎和车轮轮胎和车轮吉林大学汽车动态模拟国家重点实验室 ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSWheel Nomenclature 车轮专业术语Rim 轮辋RimRim WidthWidth 轮辋宽度轮辋宽度Rim Diameter Specified Rim Diameter轮辋直径直径标定轮辋直径标定轮辋直径Rim Diameter Designation Nominal RimDiameter 轮辋直径代号轮辋直径代号轮辋名义直径轮辋名义直径Rim Contour Designation 轮辋轮廓代号Rim Size Designation 轮辋尺寸代号RimRim FlangeFlange 轮辋凸缘轮辋凸缘吉林大学汽车动态模拟国家重点实验室 ADSL of JLUTIRES AND WHEELSTIRES AND WHEELS吉林大学汽车动态模拟国家重点实验室 ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSPneumatic Tire Nomenclature充气轮胎专业术语Tire Section Width 轮胎断面宽度Tire Overall Width 轮胎总宽度Tire Overall Outside Diameter 轮胎总外缘直径Tire Section Height 轮胎断面高度Tire Asppect Ratio 轮胎高宽比轮胎高宽比Tire Face 胎面TireTire LoadLoad IndexIndex 轮胎载荷指数轮胎载荷指数Tire Speed Symbol 轮胎速度记号ContactContact PatchPatch Footprint Footprint 接地印迹接地印迹吉林大学汽车动态模拟国家重点实验室 ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSWheel Plane Geometry 车轮车轮平面几何Wheeeel-SpSpin Axiss 车轮旋转轴线车轮旋转轴线Wheel Plane 车轮平面WheelWheel CenterCenter 车轮中心车轮中心Contact Line 接地印迹线Contact Center Center of Tire Contact 接地印迹中心Loaded Radius 负载半径StaticStatic LoadedLoaded RadiusRadius 静态负载半径静态负载半径吉林大学汽车动态模拟国家重点实验室 ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSTire Orientation Angles 轮胎轮胎方向角向角SSlipp Angglee 侧偏角侧偏角Inclination Angle侧倾角侧倾角吉林大学汽车动态模拟国家重点实验室 ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSTire Rolling Characteristics 轮胎滚动特性TireTire TrajectoryTrajectory VelocityVelocity 轮胎轨迹速度轮胎轨迹速度Tire Longitudinal Velocity 轮胎纵向速度TiTire LLatterall VVellocitity 轮胎侧向速度轮胎侧向速度Tire Vertical Velocity 轮胎垂向速度吉林大学汽车动态模拟国家重点实验室 ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSWheel Spin and Tire Slip车轮车轮旋转转和轮胎轮胎滑移Wheeeel-SpSpin Veelococityy 车轮转速车轮转速Reference Wheel-Spin Velocity 车轮参考转速TireTire LongitudinalLongitudinal SlipSlip VelocityVelocity 轮胎纵向滑移速度轮胎纵向滑移速度Tire Longitudinal Slip Ratio 轮胎纵向滑移率Clockwise Tire Rotation 轮胎顺时针旋转Counterclockwise Tire Rotation 轮胎逆时针旋转轮胎逆时针旋转吉林大学汽车动态模拟国家重点实验室 ADSLof JLUTIRES AND WHEELSTIRES AND WHEELSStandardStandard LoadsLoads andand InflationInflation PressPressuresres标准负荷和充气压力Cold Inflation Pressure 冷胎压HotHot InflationInflation PressurePressure Warm Warm InflationInflationPressure 热胎压TiTire LLoadd LiLimitit 轮胎负载极限轮胎负载极限吉林大学汽车动态模拟国家重点实验室 ADSLof JLUTIRES AND WHEELSTIRES AND WHEELSWheel Torque 车轮转车轮转矩Drivingg Toorqueque 驱动力矩驱动力矩Braking Torque 制动力矩吉林大学汽车动态模拟国家重点实验室 ADSLof JLUTIRES AND WHEELSTIRES AND WHEELSTiree Foorcesces aandd Moomeentsts 轮胎力和力矩轮胎力和力矩Tire Normal Force Tire Radial Force 轮胎垂直力TireTire LongitudinalLongitudinal ForceForce Tire Tire ForeFore-AftAft Force Force 轮胎轮胎纵向前后方向力Tire Lateral Force Tire Side Force 轮胎侧向力轮胎侧向力Tire Overturning Moment 轮胎翻转力矩Tire Rolling Moment Tire Rolling ResistanceMoment 轮胎滚动轮胎滚动阻阻力矩力矩Tire Aligning Moment Tire Aligning Torque 轮胎回正力矩回正力矩吉林大学汽车动态模拟国家重点实验室ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSPullPull ForcesForces andand MomentsMomentsProperties of Forces in the Road Plane 路面力特性TireTire ShearShear ForceForceCoefficientCoefficient Tire Tire NormalizedNormalized ShearShear Force 轮胎切向力系数轮胎标准切向力TireTire LongitudinalLongitudinal ForceForce CoefficientCoefficient Tire Tire NormalizedNormalizedLongitudinal Force 轮胎纵向力系数TireTire LateralLateral ForceForce CoefficientCoefficient Tire Tire NormalizedNormalized LateralLateralForce 轮胎侧向力系数吉林大学汽车动态模拟国家重点实验室ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSPull Forces and MomentsTire Lateral Force Load Sensitivity 轮胎侧向力负荷敏感度TireTire LongitudinalLongitudinal StiffnessStiffness 轮胎纵向刚度轮胎纵向刚度Tire Cornering Stiffness 轮胎侧偏刚度TireTire InclinationInclination StiffnessStiffness Tire Tire CamberCamber Stiffness Stiffness 轮胎侧倾轮胎侧倾刚度Tire Longgitudinal Stiffness Coefficient 轮胎纵向刚度系数轮胎纵向刚度系数Tire Cornering Stiffness Coefficient Tire CorneringCoefficient 轮胎侧偏刚度系数吉林大学汽车动态模拟国家重点实验室ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSPull Forces and MomentsTire Inclination Stiffness Coefficient Tire CamberStiffness Coefficient Tire Camber Coefficient轮胎侧倾刚度系数Tire Relaxation Lenggth 轮胎松弛长度Tire Lateral Force Response Phase Angle轮胎侧向力响应相位角轮胎侧向力响应相位角吉林大学汽车动态模拟国家重点实验室 ADSLof JLUTIRES AND WHEELSTIRES AND WHEELSNormal Force Propperties 垂垂直力特性力特性Tire Deflection 轮胎挠度TireTire NormalNormal StiffnessStiffness Tire Tire RadialRadial StiffnessStiffnessTire Spring Rate 轮胎垂向刚度吉林大学汽车动态模拟国家重点实验室 ADSLof JLUTIRES AND WHEELSTIRES AND WHEELSMMomentt PPropertities 力矩特性力矩特性Tire Overturning Moment Coefficient Tire NormalizedOOvertturniing MMoment t 轮胎翻转力矩系数轮胎翻转力矩系数Tire Rolling Moment Coefficient Tire NormalizedRollingRolling Moment Moment 轮胎滚动力矩系数轮胎滚动力矩系数Tire Aligning Moment Coefficient Tire NormalizedAligningAligning Moment Moment 轮胎回正力矩系数轮胎回正力矩系数Tire Aligning Moment Load Sensitivity 轮胎回正力矩负荷敏感度负荷敏感度吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUTIRES AND WHEELSTIRES AND WHEELSMMomentt PPropertitiesTire Overturning Stiffness 轮胎翻转刚度Tire Overturning Inclination Stiffness 轮胎翻转侧倾刚度轮胎翻转侧倾刚度Tire Aligning Stiffness 轮胎回正刚度Tire Aligning Inclination Stiffness 轮胎回正侧倾刚度Tire Aligning Stiffness Coefficient 轮胎回正刚度系数吉林大学汽车动态模拟国家重点实验室 ADSL of JLUTIRES AND WHEELSTIRES AND WHEELSTiTireRRoadd FFriictition 轮胎与路面之间的摩擦轮胎与路面之间的摩擦Tire Friction Ellipse 轮胎摩擦椭圆Tire Friction Ellipse Boundary 轮胎摩擦椭圆边界线轮胎摩擦椭圆边界线Peak Coefficient of Friction 峰值摩擦系数Slide Coefficient of Friction 滑动摩擦系数Peak-to-Slide Ratio 峰值滑移比率吉林大学汽车动态模拟国家重点实验室 ADSL of JLU26 STATES AND MODES26 STATES AND MODES状态和模态状态和模态状态和模态状态和模态吉林大学汽车动态模拟国家重点实验室 ADSL of JLUSTATES AND MODESSTATES AND MODESEEquilibilibriium 平衡平衡Steady State Trim 稳态平衡点Transient State 瞬态吉林大学汽车动态模拟国家重点实验室 ADSLof JLUSTATES AND MODESSTATES AND MODESStabilityStability 稳定性稳定性Non-Oscillatory Stability Asymptotic Stability无振荡稳定性无振荡稳定性渐近稳定性渐近稳定性Neutral Stability 中性稳定性Oscillatory Stability 振荡稳定性NonNon-OscillatoryOscillatoryInstabilityInstability Divergent DivergentInstability 无振荡不稳定性发散不稳定性OscillatoryOscillatory InstabilityInstability 振荡不稳定性振荡不稳定性吉林大学汽车动态模拟国家重点实验室 ADSL of JLUSTATES AND MODESSTATES AND MODESCConttroll MModdes 控制模态控制模态Position Control 位置控制Fixed Control 固定控制ForceForce ControlControl 力控制力控制Free Control 自由控制ClClosedd-LLoop CConttroll F Feedbdbackk CConttrol l 闭环闭环控制反馈控制Open-Loop Control 开环控制开环控制吉林大学汽车动态模拟国家重点实验室 ADSL ofJLU27 INPUTS AND RESPONSES27 INPUTS AND RESPONSES输入和响应输入和响应输入和响应输入和响应吉林大学汽车动态模拟国家重点实验室 ADSL of JLUINPUTS AND RESPONSESINPUTS AND RESPONSESInputs ControlInputs Control Input Input 输入输入控制输入控制输入Steering Control Input 方向盘控制输入SteeringSteering-WheelWheel AngleAngle Hand Hand-WheelWheel Angle Angle 方向盘角度方向盘角度Steering-Wheel Torque Hand-Wheel Torque方向盘力矩StSteeriing-WhWheell RiRim FForce H Handd-WhWheell RiRim FForce 方向盘方向盘圆周力BrakingBraking ControlControl InpInputt 制动控制输入制动控制输入Brake Pedal Force 制动踏板力BBrakke PPeddall DiDispllacement B Brakke PPeddall TTravel l制动踏板位移制动踏板行程吉林大学汽车动态模拟国家重点实验室 ADSL of JLUINPUTS AND RESPONSESINPUTS AND RESPONSESIInputts C Conttroll IInput t 输入输入控制输入控制输入Acceleration Control Input 加速度控制输入Accelerator Pedal Position 油门踏板位置Throttle Position 节气门开度Driver Control Input 驾驶员控制输入AutomaticAutomatic ControlControl InputInput 自动控制输入自动控制输入Inputs Control System Input 控制系统输入IInputts D Driiver SSettittings 驾驶员设置驾驶员设置吉林大学汽车动态模拟国家重点实验室 ADSL of JLUINPUTS AND RESPONSESINPUTS AND RESPONSESIInputts Di Distturbbance IInput t 扰动输入扰动输入Aerodynamic Disturbance Input空气扰动输入Load-Shift Disturbance Input 负载变化输入RoadRoad DisturbanceDisturbance InputInput 道路干扰输入道路干扰输入TireWheel Disturbance Input 轮胎车轮扰动输入输入Equivalent Time of Initiation 当量时间吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUINPUTS AND RESPONSESINPUTS AND RESPONSESRResponses 响应响应Vehicle Response 车辆响应Control Response 控制响应控制响应Disturbance Response 干扰响应Steady-State Response 稳态响应Gain Sensitivity 增益灵敏度GGradidientt 梯度梯度Transient Response 瞬态响应DynamicDynamic GainGain Dynamic DynamicSensitivity Sensitivity 动态增益动态增益动态灵敏度动态灵敏度Dynamic Gradient 动态梯度吉林大学汽车动态模拟国家重点实验室 ADSLof JLUINPUTS AND RESPONSESINPUTS ANDRESPONSESResponsesRise Time Response Time 上升时间响应时间Peak Response Time峰值响应时间Settling Time稳定时间峰值峰值稳态值稳态值09响应时间响应时间tr 峰值响应时间峰值响应时间t 稳定时间tspp吉林大学汽车动态模拟国家重点实验室 ADSL of JLUINPUTS AND RESPONSESINPUTS AND RESPONSESResponsesOvershoot超调值峰值-稳态值Percent Overshoot超调量峰值-稳态值稳态值X100Bandwidth带宽Peak to Steady-State Ratio峰值与稳态值比峰值稳态值吉林大学汽车动态模拟国家重点实验室 ADSL of JLU22228888 VEHICLEVEHICLEVEHICLEVEHICLE LONGITUDINALLONGITUDINALLONGITUDINALLONGITUDINAL RESPONSERESPONSERESPONSERESPONSE车辆纵向响应车辆纵向响应吉林大学汽车动态模拟国家重点实验室 ADSL of JLUVEHICLE LONGITUDINAL RESPONSEVEHICLE LONGITUDINAL RESPONSELLongititudidinall LLoadd TTransffer 纵向载荷转移纵向载荷转移Descriptors of Steady-State Longitudinal Response 纵向稳态响应描述量纵向稳态响应描述量Gain Measures 增益测量Brake Pedal Force Gain 制动踏板力增益Accelerator Pedal Position Gain 加速踏板位板位置增增益Gradient Measures 梯度测量PitchPitch AngleAngle GradientGradient 俯仰角增益俯仰角增益Suspension Trim Height Gradient 悬架平衡高度梯度吉林大学汽车动态模拟国家重点实验室 ADSLof JLUVEHICLE LONGITUDINAL RESPONSEVEHICLE LONGITUDINAL RESPONSE DDescriipttors off TTransiientt LLongititudidinall RResponse 瞬态纵向响应描述量Pitch Angle Overshoot 俯仰角超调量俯仰角超调量Descriptors of Transient Brake System Response瞬态制动系统描述量Brake Apply Rise Time 制动执行响应时间从稳态值的50上升到稳态值90所需的时间Brake Release Time 制动释放时间从稳态值的10上升到稳态值90所需的时间吉林大学汽车动态模拟国家重点实验室 ADSLof JLUVEHICLE LONGITUDINAL RESPONSEVEHICLE LONGITUDINAL RESPONSEChCharactteriiziing DDescriipttors off BBrakiking PPerfformance车辆制动性能的表征描述Adhesion Utilization 附着利用率Braking Efficiency 制动效能吉林大学汽车动态模拟国家重点实验室 ADSLof JLU29 VEHICLE LATERAL RESPONSE29 VEHICLE LATERAL RESPONSE车辆侧向响应车辆侧向响应车辆侧向响应车辆侧向响应吉林大学汽车动态模拟国家重点实验室 ADSLof JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSELateralLateral LoadLoad TransferTransfer 侧向载荷转移侧向载荷转移Tire Lateral Load Transfer 轮胎侧向载荷转移TotalTotal TireTire LateralLateral LoadLoad TransferTransfer 总的轮胎侧向载荷转移总的轮胎侧向载荷转移Tire Lateral Load Transfer Distribution 轮胎侧向载荷转移分配OverturningOverturning CoupleCouple 翻转力矩翻转力矩Overturning Couple Distribution 翻转力矩分配吉林大学汽车动态模拟国家重点实验室ADSL of JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSERRanges off DiDirectitionall RResponse方向响应范围方向响应范围On-Center Range 中心区Linear Range 线性范围Nonlinear Range 非线性范围吉林大学汽车动态模拟国家重点实验室 ADSLof JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSEDescriptors of Steady-State Directional Response稳态方向响应描述量Gain or Sensitivity Measures 增益或敏感系数测量Lateral Acceleration Gain Steering Sensitivity 侧向加速度增益转向灵敏度LateralLateral AccelerationAcceleration MomentMoment GainGain Control Control MomentMoment Sensitivity Sensitivity 侧侧向加速度力矩增益控制力矩灵敏度Yaw Velocity Gain 横摆角速度增益Sideslip Angle Gain 侧偏角增益Path Curvature Gain 轨迹曲率增益StSteeriing-WhWheell TTorque GGaiin St Steeriing StiffStiffness 方向盘力矩增益方向盘力矩增益转向刚度吉林大学汽车动态模拟国家重点实验室ADSL of JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSEDescriptors of Steady-State Directional Response稳态方向响应描述量Gradient Measures 梯度测量Steering-Wheel Angle Gradient Hand-Wheel Angle Gradient 方向盘转角梯度SteeringSteering-WheelWheel TorqueTorque GradientGradient Hand Hand-WheelWheel TorqueTorqueGradient 方向盘力矩梯度Reference Steer Angle Gradient 基准转向角梯度Ackermann Steer Angle Gradient 阿克曼转向角梯度Roll Angle Gradient 侧倾角梯度SSuspensiion RRollll AAnglle GGradidientt 悬架侧倾角梯度悬架侧倾角梯度Sideslip Angle Gradient 侧偏角梯度PathPath CurvatureCurvature GradientGradient 轨迹曲率梯度轨迹曲率梯度吉林大学汽车动态模拟国家重点实验室 ADSL of JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSEUndersteer and Oversteer不足转向和过度转向Understeer Oversteer Gradient 不足转向过度转向梯度Neutral Steer 中性转向Understeer 不足转向Oversteer 过多转向Cornering Compliance转向柔度转向柔度吉林大学汽车动态模拟国家重点实验室 ADSLof JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSE Stability Measures 稳定性测量NeutralNeutral SteerSteer LineLine 中性转向线中性转向线StStatitic MMargiin 静态储备系数静态储备系数Stability Factor 稳定性因数吉林大学汽车动态模拟国家重点实验室 ADSLof JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSE Characterizing Speeds 速度特性Tangent Speed 切向速度CharacteristicCharacteristic SpeedSpeed 特征车速特征车速Critical Speed 临界车速吉林大学汽车动态模拟国家重点实验室 ADSLof JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSE Descriptors of Transient Directional Response瞬态方向响应描述量Rise-Time Measures 响应时间测量响应时间测量Lateral Acceleration Rise Time LateralAcceleration Respponse Time 侧向加速度响应时间Sideslip Angle Rise Time Sideslip AngleResponse Time 侧偏角响应时间Yaw Velocity Rise Time Yaw Velocity ResponseTime 横摆角速度响应时间Yaw Velocity Peak Response Time 横摆角速度峰值响应时间吉林大学汽车动态模拟国家重点实验室 ADSL ofJLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSEDescriptors of Transient Directional Response瞬态方向响应描述量Overshoot Measures 超调量测量超调量测量Yaw Velocity Overshoot 横摆角速度超调量RollRoll AngleAngle OvershootOvershoot 侧倾角超调量侧倾角超调量吉林大学汽车动态模拟国家重点实验室 ADSL of JLUVEHICLE LATERAL RESPONSEVEHICLE LATERAL RESPONSEDescriptors of Limit Response 极限响应描述量Directional Response Limits 方向响应极限imumimum LateralLateral AccelerationAcceleration 最大侧向加速度最大侧向加速度。
汽车系统动力学第2章 车辆动力学建模方法及基础
第三节 多体系统动力学方法
3.车辆建模中对柔体的考虑 在汽车工程领域,由于提高车辆的行驶速度、最大限度地减轻 车重、降低能耗等要求,使得在高速车辆的操纵稳定性、行驶 平顺性分析中必须考虑车身、车架以及转向系统构件的弹性; 在传动系统的齿轮、传动轴,发动机的曲轴连杆、配气机构等 的动力学分析中,必须采用多柔体动力学模型才能满足精度要 求。
第三节 多体系统动力学方法
(4)研究中存在的问题 多柔体系统动力学的研究虽然在近 十几年中取得了长足的发展,但是目前仍存在一些不足,如动 力学方程的建立及求解欠成熟;计算机程序的编制规划和交 流欠通畅;理论研究与实际应用的差距有时会较大,可能需要 一些试验数据做补充等。 上述问题的核心是构造满足精度条件下具有小求解尺寸的动 力学模型和构造刚性(病态)条件下具有良好稳定性和计算精 度的数值算法。这两方面的工作是反映柔性效应对系统的影 响,特别是对复杂大系统的影响的关键所在,同时也是多体系 统动力学分析研究的重点和难点。
第三节 多体系统动力学方法
(3)图论(R-W)方法 1966年R. E. Roberson和J. Wittenburg创造性地将图论引入多刚体系统动力学,利用图论中 的一些基本概念和数学工具成功地描绘系统内各个刚体之间的联 系状况,即系统的结构。借助图论工具可将系统的结构引进运动 学和动力学的计算公式。Roberson-Wittenburg和HookerMargulies独立地重新发现并发展了增广体概念。利用增广体概 念可对Roberson-Wittenburg或Hooker-Margulies的基本方 程做出明确的物理解释。R-W方法完美地处理了树结构的多刚体 系统,而对非树系统,则利用假想铰切割或刚体分割方法转变成树 系统处理。R-W方法以相邻刚体之间的相对位移为广义坐标,对 复杂的树结构动力学关系给出了统一的数学表达式,并据此推导 出系统微分方程,编制了应用于机械、卫星、车辆和机器人等的 MESA VERDE程序。
汽车系统动力学第二章 车辆动力学建模方法及基础理论
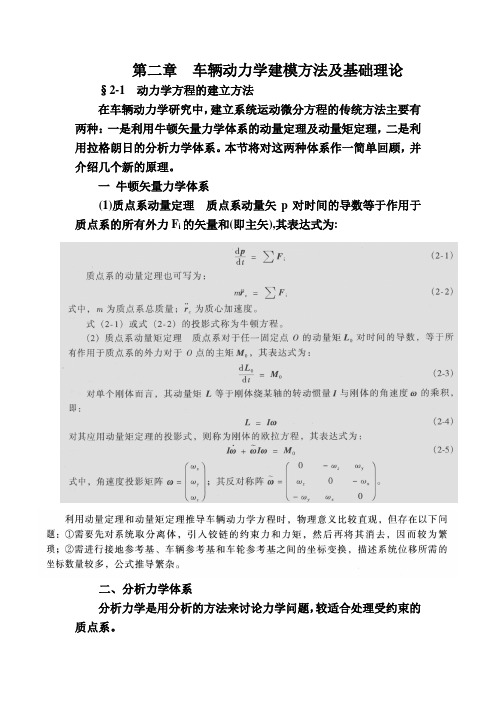
第二章车辆动力学建模方法及基础理论§2-1 动力学方程的建立方法在车辆动力学研究中,建立系统运动微分方程的传统方法主要有两种:一是利用牛顿矢量力学体系的动量定理及动量矩定理,二是利用拉格朗日的分析力学体系。
本节将对这两种体系作一简单回顾,并介绍几个新的原理。
一牛顿矢量力学体系(1)质点系动量定理质点系动量矢p对时间的导数等于作用于质点系的所有外力F i的矢量和(即主矢),其表达式为:二、分析力学体系分析力学是用分析的方法来讨论力学问题,较适合处理受约束的质点系。
(1)动力学普遍方程动力学普遍方程由拉格朗日(Lagrange)于1760年给出的,方程建立的基本依据是虚位移原理,表示如下:(2-6)(2)拉格朗日方程拉格朗日法的基本思想是将系统的总动能和总势能均以系统变量的形式表示,然后将其代入拉格朗日方程,再对其求偏导数,即可得到系统的运动方程。
拉格朗日方程形式如下:利用此方程推导车辆动力学方程时,因采用广义坐标,从而使描述系统位移的坐标数量大大减少,并可以自动消去无功内力。
但也存在下述问题:①应用拉格朗日方程时,有赖于广义坐标选取得是否得当,而适当地选择广义坐标有时要靠经验;②拉格朗日能量函数对于刚体系统的表达式可能非常复杂,代人拉格朗日方程后要作大量运算。
而对于复杂的车辆系统,写出能量函数的表达式就更加困难。
三、虚功率原理若丹(Jourdain)于1908年推导出另一种形式的动力学普遍方程,其所依据的原理称之为虚功率原理。
虚功率形式的动力学普遍方程为:四、高斯原理1829年,高斯(Gauss)提出动力学普遍方程的又一形式,称为高斯原理,其表达式为:§2-2 非完整系统动力学一、非完整系统动力学简介1894年,德国学者Henz第一次将约束系统分成“完整”和“非完整”两大类,从此开辟了非完整系统动力学(Nonholonomie System)的新领域,如今它已成为分析力学的一个重要分支。
02_车辆动力学建模方法及基础理论
汽 车 系 统 动 力 学
车辆动力学中应用非完整约束的利弊
传统方法中,车轮和地面间的约束是用力和力矩描述 的,其规律不易获得。采用非完整约束可以避免它; 与车轮实际运动状况相符,更精确; 要想获得车轮与地面之间的作用力,采用拉格朗日待 定乘子法即可求出约束力; 在控制动力学中,控制装置可以处理成非完整约束形 式,便于研究;
13
汽 车 系 统 动 力 学
研究方法
车辆建模中对柔体的考虑(柔体部件的建模方法) 离散化方法 划分为刚体,用力元约束; 钢板弹簧的建模; 适用于形状和力学特性较规则的简单模型。
马 天 飞
14
汽 车 系 统 动 力 学
研究方法
车辆柔体部件的建模 模态集成法 利用有限元方法计算柔体模态,集成到多体系 统中建模。 局部小变形,整体大变形。 考虑车身、车架柔性的刚弹耦合建模。
可以得到非完整约束方程组
x = θr0sin ϕ ɺ ɺ ɺ ɺ y = θr0cosϕ
马 天 飞
8
汽 车 系 统 动 力 学
非完整约束方程的实例
考虑车轮定位参数的约束方程 考虑车轮的外倾角和前束角,车轮呈空间倾斜状态。
可以得到约束方程组
马 天 飞
ɺ xC − r0 (ψ t cosψ tsin γ + γsin ψ t cosγ +θcosψ t ) = 0 ɺ ɺ ɺ ɺ ɺ ɺ ɺ yC − r0 (ψ tsin ψ tsin γ + γcosψ t cosγ +θsin ψ t ) = 0 ɺ ɺ zC + r0γsin γ = 0
马 天 飞
11
汽 车 系 统 动顿-欧拉方法 拉格朗日方程法(ADAMS、DADS软件) 图论(R-W)方法 凯恩方法 变分方法 旋量方法 优点 适用对象广泛,通用性强; 可计算大位移运动,便于研究几何非线性问题; 不用推导公式,模型精度高。
车辆动力学行星齿轮传动建模分解课件
车辆动力学主要研究车辆行驶过程中的动态性能,包括牵引性能、制动
性能、操作稳定性和行驶平顺性等。
03
耦合关系的重要性Βιβλιοθήκη 行星齿轮传动与车辆动力学之间存在密切的耦合关系,行星齿轮传动的
性能直接影响车辆的动力学性能,因此需要对两者进行耦合建模以实现
更精确的仿真和分析。
行星齿轮传动与车辆动力学的耦合模型
1 2 3
耦合效应的实际意义
通过对耦合效应的分析,可以深入了解行星齿轮传动与车 辆动力学之间的相互关系和影响机制,为优化车辆设计和 性能提供理论支持和实践指点。
05
实例分析与应用
某型汽车行星齿轮传动的动力学分析
总结词
详细描述
该部分第一介绍了车辆动力学行星齿轮传动 的基本概念和原理,然后以某型汽车为例, 详细讲授了其行星齿轮传动的动力学分析过 程,包括模型建立、参数设置、结果分析等 。
总结词
该部分主要讲述了某型汽车的动力学仿真与优化过程。通过仿真分析,得到了该型汽车在不同工况下 的动力学特性,并针对不良工况进行了优化设计。
详细描述
在某型汽车的动力学仿真方面,采用了专业仿真软件对该型汽车进行了动力学仿真分析,得到了其在 不同工况下的动力学特性。在优化设计方面,根据仿真结果,针对不良工况进行了优化设计,包括改 变齿轮参数、调整悬挂系统等措施,最终提高了该型汽车的整体性能。
建立耦合模型的方法
通过将行星齿轮传动的运动方程与车辆动力学方 程进行耦合,建立行星齿轮传动与车辆动力学之 间的耦合模型。
耦合模型的基本组成
耦合模型包括行星齿轮传动的运动方程和车辆动 力学方程,其中涉及到的变量包括转速、转矩、 加速度等。
模型简化与假设
为了简化模型并使其更易于分析,通常需要对模 型进行假设和简化,例如假设传动系统为线性系 统,忽略阻尼等次要因素。
机械传动系统的运动特性建模与仿真

机械传动系统的运动特性建模与仿真引言:机械传动系统是现代工业中不可或缺的重要组成部分。
通过传递和转换动能,机械传动系统可以实现不同工艺和运动要求。
准确地建模和仿真机械传动系统的运动特性,可以为系统设计与优化提供有力的支持。
本文将探讨机械传动系统的运动特性建模与仿真的方法和应用。
一、机械传动系统的基本原理机械传动系统由传动装置、传送带、轴承、齿轮等组成,通过各个零部件之间的相互作用,实现能量的传递和转换。
在机械传动系统中,常见的传动方式包括直线传动、旋转传动和连续传动等。
1. 直线传动直线传动是指传动装置通过直线运动实现动能的传递和转换。
这种传动方式广泛应用于输送带、链条传动等。
在建模和仿真直线传动系统时,需考虑传动装置受力、摩擦和阻力等因素对系统运动特性的影响。
2. 旋转传动旋转传动是指传动装置通过转动实现能量的传递和转换。
这种传动方式常见于齿轮传动、皮带传动等。
在建模和仿真旋转传动系统时,需考虑齿轮啮合、轴承摩擦、离心力等因素对系统的动力学响应和稳定性的影响。
3. 连续传动连续传动是指传动装置通过连续的动力学过程实现能量的传递和转换。
例如,汽车的传动系统就是一种连续传动系统。
在建模和仿真连续传动系统时,需要考虑系统中各个部件之间的动力学相互作用和能量损耗,以实现系统动态特性的准确预测。
二、机械传动系统的运动特性建模方法机械传动系统的运动特性建模是机械工程领域中的一项重要任务。
它可以通过建立系统的数学模型,描述和分析系统在给定条件下的运动特性,为系统设计与优化提供重要的理论支持。
常见的机械传动系统运动特性建模方法包括经典数学建模方法和基于计算机仿真的建模方法。
1. 经典数学建模方法经典数学建模方法包括运动学和动力学建模两个方面。
在运动学建模中,可以通过定义系统中各个部件之间的几何关系,计算系统中部件的位移、速度和加速度等。
在动力学建模中,需考虑系统中部件之间的相互作用力、惯性力和外部载荷等因素,通过牛顿运动定律和能量守恒定律等原理,建立系统的运动学方程和动力学方程,并求解系统的运动变量。
基于MATLAB车辆动力传动系统建模与仿真研究
基于MATLAB车辆动力传动系统建模与仿真研究作者:王铁刘菲菲来源:《科技视界》2013年第34期【摘要】本文在MATLAB/Simulink环境下,建立了车辆动力传动系及其各部件的动力学仿真模型,该系统可以模拟最佳动力性换挡规律下车辆的行驶性能,模拟车辆换挡的动态过程,为换挡规律的开发、换挡动态过程的控制的研究提供了方便。
【关键词】自动变速器;建模;仿真;动力传动系统0 引言由于市场竞争激烈,在对车辆动力传动系统的研究中,各厂商要在短时间内开发出新的产品,就需要通过软件建模仿真这样的有效的途径,既满足用户需求,同时可以给厂家赢得利益。
车辆传动系统的建模仿真对分析整个动力系统及相关子系统的行为非常有利,不仅能进行不同设计方案的比较,还能够更精确的理解各种换挡规律对车辆性能的影响[1]。
1 车辆动力传动系动力学分析动力传动系统以变矩器为界可分为三个部分:发动机与变矩器泵轮固连的部分为前半部分;变矩器涡轮与变速器、传动轴、主减速器、车轮共同组成后半部分;变矩器本身为一部分[2-4]。
1.1 传动系前部分对于由发动机与泵轮组成的前部分有式(1)、(2)的动力学方程,由于泵轮与发动机相连故发动机负载转矩Mi即为泵轮转矩。
Iebn■=Me-Mi(1)Ieb=Ie+Ib(2)式中:ne——发动机转速,r/min;Ieb——发动机和泵轮的转动惯量,kg·m2;Ie——发动机转动惯量; Ib——泵轮转动惯量;Me——发动机转矩,N·m; Mi——发动机负载转矩。
1.2 传动系后部分对于动力传动系后半部分,动力学方程如式(3)-(7),由于涡轮与变速器相连,涡轮的输出转速nT为变速器的输入转速nin,涡轮的输出转矩MT为变速器的输入转矩Min。
车辆的驱动力是由发动机转矩经传动系传至车轮上得到的。
车轮上的驱动力Ft和车速v由式(3)-(4)得到。
车辆动力学方程如式(7),它反应了车辆在行驶过程中所受到的各种阻力,并用来估算车辆的车速和加速度。
车辆动力学模型课件
发动机模型与特性
发动机模型
发动机是车辆的动力源,其模型和特性 对车辆的动力学性能有很大的影响。
VS
发动机特性
发动机的特性包括功率、扭矩、燃油消耗 等,这些特性会影响车辆的加速性能、最 高速度和燃油经济性。
04
车辆动力学模型的建立与 验证
车辆动力学模型的建模方法
基于物理学的建模方法
01
根据车辆的物理规律和运动特性,建立相应的数学模型。
车辆动力学模型的分类
根据应用领域和目的的不同,车辆动力学模型可 以分为不同的类型,例如基本动力学模型、制动 系统模型、悬挂系统模型、转向系统模型等。
制动系统模型和悬挂系统模型分别描述车辆的制 动系统和悬挂系统的动态行为,这些模型可以用 于预测和优化车辆在不同条件下的制动性能和乘 坐舒适性。
基本动力学模型主要描述车辆的整体动态行为, 包括车辆的加速度、速度和位置等变量,以及它 们之间的相互作用关系。
车辆动力学模型课件
contents
目录
• 车辆动力学模型概述 • 车辆空气动力学模型 • 车辆动力学模型的关键参数 • 车辆动力学模型的建立与验证 • 车辆动力学模型的发展趋势与挑战
01
车辆动力学模型概述
车辆动力学模型的定义
车辆动力学模型是一种描述车辆动态行为的数学模型,它基 于力学、运动学和动力学原理,将车辆视为一个系统,并对 其进行数学描述。
集成化
未来的车辆动力学模型将更加重视不同领域之间的集成,例如将车辆动力学与能源、环境 、交通等多个领域进行集成,实现多领域的协同优化。
车辆动力学模型面临的挑战
01
高维度
车辆动力学模型具有高维度和非线性的特点,这使得模型的建立和求解
变得非常复杂和困难。因此,需要发展新的数值方法和计算技术来处理
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
nT
较高,
可以充分利用变矩器变矩性能,提高动力性;高挡闭锁
nT较低,以便尽早闭锁,利用机械传动,提高传动效率。
nT
3. 单参数闭锁控制
2)按车速进行闭锁控制
只要当车速达到某一定值时, 就能实现变矩器闭锁。 闭锁工况的 工作区
这可以避免低挡范围内 频繁闭锁,减少由此引起的 冲击和磨损。
3. 单参数闭锁控制
J5
e56
J6
J e12 2 J1 J2
J e12 1 J1 J2
J4
e45 e34 e45
J4
e34 e34 e45
J6
e60 e56 e60
J6
e56 e56 e60
J1 J 2
e23
e34 e45
e56 e60
J3
J5
J1 J 2
J2 J1 J 2
e23 e12
de Te Tc1 Tc 2 dt dc1 T J c1 Tc1 o dt i1 Je J c2 J dc 2 T Tc 2 o dt i2
do To T f dt Tc1 Z1 F1re1 Tc 2 Z 2 F2 re 2
de Te Tc1 Tc 2 dt d J Tc1 Tc 2 T f dt Tc1 Z1 F1re1 Je Tc 2 Z 2 F2 re 2
闭锁工况的 工作区
nT
4. 双参数闭锁控制
2)按车速和油门开度进行闭锁控制 油门开度一定时,只有当车速到 达一定值才闭锁;并可以根据挡 位实现高挡闭锁而低挡不闭锁, 是目前轿车常用的控制。
闭锁工况的 工作区
4. 双参数闭锁控制
3)按变矩器的速比进行闭锁控制 每当传动比达到一定值时,实现 闭锁。 这种控制原理比较合理,在各种油 门开度下都可得到合理的效率及动 力性能。
二、动态模型示例 行星变速箱
L T B Z
Je
r
de Me - MB dt
( JT J s )
c
d r Jr MZ ML Mr dt dc Jc Mc Mo dt
d s MT - M L - M s dt
某 两 挡 行 星 变 速 箱
(a)发动机-泵轮构件
一、换挡规律
每一个自动换挡系统都有一个换挡规律,它的曲线形状取决 于车辆传动的要求 , 由自动换挡系统的结构和参数来实现。
B
A
1
B
A
1
2
a Ⅰ
b Ⅱ
Ⅰ
Ⅱ
1
B
1
A
2
2
B
A
1
2
2
降挡线
升挡线
降挡线
升挡线
一、换挡规律
自动换挡特性 F
在牵引 特性图上表 示出由换挡 规律决定的 换挡点,这 种图线称换 挡特性图。 降挡曲线
闭锁工况的 工作区
nT
三、换挡过渡过程
1.换挡过渡过程的两种状态:
转矩相:在这种状态下,各构件之间只有转矩的 分配和变动,没有急剧的转速变化,因而忽略惯 性的影响。
惯性相:在这种状态下,不仅有转矩的变动,同 时伴有急剧的转速变化,因而惯性的影响不能忽 略。
三、换挡过渡过程
n
L Z T B
ns nc nr
A
B
C
a
r
升挡过程
低挡:A点以前
c
0 Tc
t/s
b
'' J k J k J k 1
' ek' 1
' ek'
J k 1 e ek J k J k 1
'' k-1
J k''
e'' k
Jk ek J k J k 1
一、传动系统动态模型 3.缩减自由度的基本方法
3)例
J1 e12 J2 e23 J3 e34 J4 e45
换挡特性曲线
一、换挡规律
2.单参数换挡规律
B A
换挡重叠或换挡延迟
1
1)换入新挡后不会因车速稍有变化而 重新换回原来的排挡,保证了换挡过程 的稳定性;
Ⅰ Ⅱ
2)有利于减少换挡循环,防止控制元 件加速磨损与降低乘坐舒适性;
B
1
A
2
3)变化换挡延迟可改变换挡规律。
不能实现驾驶员的干预换挡。经济性差, 实际中只有少数军用车辆上有所应用, 目的是减少换挡次数,发挥车辆动力性 能。
一、换挡规律
1. 换挡规律概念
相邻排挡之间自动换挡点的控制参数(车速υ、油门开 度α)的变化规律,称为换挡规律。 是自动换挡系统的基本特性。 是按照车辆动力性和经济性要求设计的。 ECU的作用就是按照换挡规律的要求,来进行换挡控 制的,按车速、油门中的一个或两个参数,根据设计要 求的换挡时刻自动换挡,才能保证车辆获得良好的动力 性能和经济性能。
G 式中: ——材料的剪切弹性模量; 4 ; I —— 轴的横截面极惯性矩,I D / 32
D —— 轴的直径; L —— 轴的长度。
对于传动系的复杂轴段,常简化为阶梯轴或 者套轴,按照刚度串联或者并联的方法求解。
有限元分析软件
一、传动系统动态模型
3.缩减自由度的基本方法
1)双质量系统代替单质量系统
JB
JT
J1
J2
J3
J4 JL
Me e
T D B
1
CL CH
2
C1 C2
ML L
LC
T
D B
CR
C3
J0
J1
J2
J3
传统变速装置
二、动态模型示例
定轴变速箱
ML Me
e
B
K eB
LC
T D B
T
K T1
1
CL CH
2
K 23
3
C1 C2
4
L
K 4L
C4L J4 JL
CeB Je JB JT
优点: 1)大油门时换挡延迟大,可减少换挡次数。 2)大油门时,升挡车速高,接近最大功率点, 动力性好 。 缺点: 大油门降挡时的车速低,功率利用差,较适用 于后备功率大的轻型车辆。
1
2
2
3
v
一、换挡规律
2.双参数换挡规律
1 2 2 3
收敛型换挡规律:换挡延迟随油门开度增 大而减小,呈收敛状分布,也称减延迟型 换挡规律 。 1)在升降挡时都有较好的功率利用,动 力性好。 2)低速时,可以松油门提前换高挡,改 善燃油经济性。 发动机可以在较低转速下工作,燃油经济 性好、噪声低、行驶平稳舒适。该规律适 合于比功率较低的货车。
M T /M B K
(b)涡轮一太阳齿轮构件
(c)制动器一齿圈构件
M B gB nB D5
2
(d)行星架一输出轴构件
行星排转速关系式: 行星排转矩关系式:
s kr (1 k )c 0
M s : M r : M c 1 : k : (1 k )
第二节
传动系统的换挡控制和闭锁控制
1
2
2
3
v
一、换挡规律
3.其它换挡规律
(a)组合型换挡规律 由两段或多段不同变化规律所组成的换挡规律,便于在不同油 门开度范围内得到不同的车辆性能。 常见的组合型换挡规律:小油门开度以舒适、稳定及少污染为 主;大油门开度则以动力性能为主;在中等油门开度下,首先要求 很好的燃料经济性,其次要有满意的动力性能。 (b)多规律换挡控制
(c)设计了强制降挡,当油门 开 度 达 85-90% 时 , 可 以 提 前 降 入低挡,提高了降挡后的发动 机转速,改善了降挡后的功率 利用和动力性。
一、换挡规律
阿里逊CLBT-6061重型车辆的换挡规律
采用收敛型换挡规律。当油门全开时, 降挡速差最小,有利于得到优良的动力 性能。在小油门开度时,降挡速差最大, 得到广泛的多挡重叠工作区,可以大大 减少换挡次数,也有利于提高经济性。
第三章
传动系统动态过程建模
第一节 传动系统动态过程模型及建模方法 第一节 动力传动系统扭转自由振动 第二节 传动系统的换挡控制和闭锁控制 第二节 动力传动系统扭转强迫振动
第一节
传动系统动态过程模型及建模方法
一、传动系统动态模型建模方法
1.建模原则
1)模型满足仿真任务需求。
2)模型应正确反映系统性质。 3)简化为集中质量离散系统。
一、传动系统动态模型
2.建模方法
1)多自由度系统,每个自由度对应一个集中质量
2)发动机用一个惯量表示
3)齿轮、较大质量部件为集中质量,惯性质量不做功的分 支和惯量可以包括在作功元件内。
一、传动系统动态模型
2.建模方法
4)模型参数确定
• 转动惯量 三维建模软件
• 轴的扭转刚度 材料力学公式
GI GD4 K L 32L
J3 J4
e45 e34 e45
J4
e34 e34 e45
J5 J6
e60 e56 e60
e12
J1 J1 J 2
e34 e45
e56 e60
二、动态模型示例
定轴变速箱
ML
Me
e
B
T D B
T
1
CL CH CR
2
3
C1 C2 C3
4
L
LC
Je
二、闭锁规律
1.变矩器的闭锁控制
(1)改善传动性能的闭、解锁。
(2)换挡时变矩器的缓冲解锁。