信号与系统第六章 应用
《信号与线性系统》 东南大学 管致中 夏恭恪 孟桥著 高等教育出版社第六章-2

An-1n -1 a An-2 An-3 Bn-1 n -3 Cn-1n -5 Dn-1 -7 a a an … Bn-2 Bn-3 B2 0 0 Cn-2 Cn-3 0 0 0 Dn-2 … Dn-3 …
Ai −1 =
M
第(n-1)行 A2 第n行 第(n+1)行
An − 2 =
3
∴ H 3 ( s ) 系统不稳定
以上两个性质是判断系统稳定的必要条件
第六章 连续时间系统的系统函数
(二) 罗斯-霍维茨(Routh-Hurwitz)准则(判据) 罗斯-霍维茨( 准则(
内容: 若 内容: D(s) = an sn + an−1sn−1 +L+ a1s + a0 的根全部位于s左半平面的充要条件是 左半平面的充要条件是: 则 D(s) = 0 的根全部位于 左半平面的充要条件是: (ⅰ)D ( s ) 的全部系数 a i 为正,无缺项; 为正,无缺项; 罗斯-霍维茨阵列中第一列数字( )符号相同 (ⅱ)罗斯-霍维茨阵列中第一列数字( A i )符号相同 -6 R-H阵列: 1行 An an Bn an -2 Cnan -4 Dnan… … 阵列: - 阵列 第
第六章 连续时间系统的系统函数
例 4 反馈系统
F(s) + _ E(s) G(s)
H(s)
Y(s)
前向通道 , 反馈通道 H ( s ) = K 问当常数满足什么条件时,系统是稳定的? 解: E ( s) = F ( s) − H ( s)Y ( s)
Y ( s ) = E ( s )G ( s ) = G ( s ) F ( s ) − G ( s ) H ( s )Y ( s )
信号与系统在生活中的应用

信号与系统在生活中的应用一、引言信号与系统是现代通信、控制、计算机等领域的重要基础知识,其应用广泛。
本文将从生活中的角度出发,介绍信号与系统在各个方面的应用。
二、通信领域1. 手机通讯手机通讯是当今社会不可或缺的一种通讯方式。
在手机通讯中,信号与系统起着至关重要的作用。
手机通过天线接收到来自基站发射的无线电波信号,并经过解调等处理后将信息传输给用户。
2. 互联网通讯互联网通讯是指通过互联网进行信息交流和传输的一种方式。
在互联网通讯中,数据以数字形式传输,需要经过编码和解码等处理才能正确地传输和接收。
三、音频领域1. 音乐播放器音乐播放器是人们日常生活中常用的一种设备。
在音乐播放器中,信号与系统起着至关重要的作用。
音乐以模拟信号形式存储在磁带或光盘上,在经过解码等处理后才能转换成声音输出。
2. 语音识别技术语音识别技术是指将人类语音转换成计算机可识别的数字信号的一种技术。
在语音识别技术中,信号与系统起着至关重要的作用。
语音信号需要经过滤波、降噪等处理后才能准确地识别。
四、视频领域1. 数字电视数字电视是指将模拟电视信号转换成数字信号进行传输和接收的一种技术。
在数字电视中,信号与系统起着至关重要的作用。
数字电视需要经过编码和解码等处理才能正确地传输和接收。
2. 视频监控视频监控是指通过摄像头等设备对特定区域进行监控和录像的一种技术。
在视频监控中,信号与系统起着至关重要的作用。
摄像头采集到的图像需要经过压缩、编码等处理后才能正确地传输和存储。
五、医疗领域1. 医学影像设备医学影像设备是指用于医学影像检查和诊断的一类设备,如X光机、CT机、MRI机等。
在医学影像设备中,信号与系统起着至关重要的作用。
医学影像需要经过滤波、增强等处理后才能清晰地显示。
2. 生命信号监测生命信号监测是指对人体各种生理信号进行实时监测的一种技术。
在生命信号监测中,信号与系统起着至关重要的作用。
生理信号需要经过滤波、放大等处理后才能准确地监测和记录。
信号与系统第六章习题答案

第六章 离散系统的Z域分析 6.1学习重点 1、离散信号z 域分析法—z变换,深刻理解其定义、收敛域以及基本性质;会根据z变换的定义以及性质求常用序列的z变换;理解z变换与拉普拉斯变换的关系。
2、熟练应用幂级数展开法、部分分式法及留数法,求z 反变换。
3、离散系统z 域分析法,求解零输入响应、零状态响应以及全响应。
4、z 域系统函数()z H 及其应用。
5、离散系统的稳定性。
6、离散时间系统的z 域模拟图。
7、用MATLAB 进行离散系统的Z 域分析。
6.2 教材习题同步解析 6.1 求下列序列的z 变换,并说明其收敛域。
(1)n 31,0≥n (2)n−−31,0≥n(3)nn−+ 3121,0≥n (4)4cos πn ,0≥n(5)+42sin ππn ,0≥n 【知识点窍】本题考察z 变换的定义式 【逻辑推理】对于有始序列离散信号[]n f 其z 变换的定义式为()[]∑∞=−=0n nzn f z F解:(1)该序列可看作[]n nε31()[][]∑∑∞=−∞=− == =010313131n n n nn n z z n n Z z F εε对该级数,当1311<−z ,即31>z 时,级数收敛,并有 ()13331111−=−=−z zz z F其收敛域为z 平面上半经31=z 的圆外区域 (2)该序列可看作[]()[]n n nnεε331−=−−()()[][]()[]()∑∑∞=−∞=−−=−=−=010333n nn nnnzzn n Z z F εε对该级数,当131<−−z ,即3>z 时,级数收敛,并有()()33111+=−−=−z zz z F 其收敛域为z 平面上半经3=z 的圆外区域(3)该序列可看作[][]n n nn n n εε+ = + −3213121()[][]()∑∑∑∞=−∞=−∞=−+ =+ = + =01010*********n nn n n nn n n n z z z n n Z z F εε对该级数,当1211<−z 且131<−z ,即3>z 时,级数收敛,并有 ()3122311211111−+−=−+−=−−z zz z z zz F 其收敛域为z 平面上半经3=z 的圆外区域(4)该序列可看作[]n n επ4cos()[]∑∑∑∑∞=−−∞=−−∞=−∞=−+=+== =0140140440*******cos 4cos n nj n nj nn j j n n z e z e z e e z n n n Z z F πππππεπ对该级数,当114<−ze j π且114<−−zejπ,即1>z 时,级数收敛,并有()122214cos 24cos 21112111212222441414+−−=+−−=−+−=−×+−×=−−−−z z zz z z z z e z z e z z z eze z F j j j j ππππππ其收敛域为z 平面上半经1=z 的圆外区域 (5)该序列可看作[][][]n n n n n n n n εππεππππεππ+=+= +2cos 2sin 222sin 4cos 2cos 4sin 42sin()[]()122212212212cos 22cos 2212cos 22sin 222cos 222sin 222cos 2sin 222222222200++=+++=+−−++−=+=+=∑∑∞=−∞=−z z z z z z z z z z z z z z z n z n n n n Z z F n nn n ππππππεππ 其收敛域为z 平面上半经1=z 的圆外区域 6.2 已知[]1↔n δ,[]a z z n a n −↔ε,[]()21−↔z z n n ε, 试利用z 变换的性质求下列序列的z 变换。
信号与系统 (11)
它在使用中有一些不便: 1) 不能解决信号动态范围与精度之间的矛盾; 2) 不能解决频率范围与精度之间的矛盾;
波特图采用对数坐标,解决上面的问题。而且它有利 于系统综合。
二、 对数频率特性
假设: H ( jω ) = H ( jω ) e jϕ (ω ) 。对其取对数:
G(ω) = 20log[H ( jω) ]
单位:分贝(Deci-Bel,dB)。 奈培与分贝的转换关系:1 Np = 8.686 dB
在理论分析中,一般使用 Np;在实际应用中,一般使 用 dB
用分贝表示增益,解决了信号动态范围与精度之间的 矛盾。如果在频率坐标中同样使用对数坐标,则同样可以 解决频率的范围与精度之间的矛盾。
这样一来就形成了波特图。
H ( jω)
80dB 10000
60dB 1000
40dB 100
20dB 10
01
0.001 0.01 0.1
1
-20dB
10 100 1000 10000
ω
波特图的横坐标可以用 logω ,也可以用 log f ;
在波特图的横坐标上,一般直接标注频率值;
波特图的横坐标上只能表示 ω > 0 或者 f > 0 频率下
函函
电流传输函数:
数
数
电流 I1(s) 电流 I2(s)
Ti21(s)
=
I2(s) I1(s)
电压传输函数:
电压U1(s) 电压U2 (s)
Tu
21(s)
=
U2(s) U1(s)
三、 H (s) 、 H ( p) 、 H ( jω ) 、 h(t) 之间关系
信号与系统第三版 第六章习题答案
2 t 2
cos
2 2
t ]u (t )
6.13 一个因果LTI系统的频率响应为:
5 jw 7 H ( jw) ( jw 4)[( jw) 2 jw 1]
(a) 求该系统的冲激响应
(b) 试确定由一阶系统和二阶系统构成的串联型结构 (c)试确定由一阶系统和二阶系统构成的串联型结构 解:(a) 5 jw 7 1 jw 2
I 2 (w) 2 jw H ( jw) E (w) 8 jw 3
(b) 对H(jw)作反傅立叶变换可得h(t)
2 jw 1 H ( jw) 8 jw 3 4
h(t ) F 1{H ( jw)}
3 32 3 jw 8 3t 1 3 8 (t ) e u (t ) 4 32
(b) 对H(jw)作反傅立叶变换可得h(t)
3 3 3( jw 3) 2 H ( jw) 2 ( jw 2)( jw 4) ( jw 2) jw 4
3 2t h(t ) F {H ( jw)} (e e 4t )u (t ) 2 (c) 3( jw 3) 3 jw 9 Y ( w) H ( jw) 2 ( jw 2)( jw 4) ( jw) 6 jw 8 X ( w)
1 X ( w) ( jw 2) 2
Y (w) H ( jw) X (w)
2 Y ( w) 3 ( jw 2) ( jw 4)
1 1 4 2 3 ( jw 2) ( jw 2) ( jw 2) ( jw 4) 1 4 1 2
1 2t 1 2t 1 2 2t 1 4t y (t ) F {Y ( w)} ( e te t e e )u (t ) 4 2 2 4 2 2 ( jw ) 2 (c) H ( jw) ( jw) 2 2 jw 1
信号与系统第6章拉氏变换

F ( s) s 2 2 1 s 1 s 2 f (t ) ' (t ) 2 (t ) 2e t e 2t
6.1 引言
19世纪末,英国工程师赫维赛德采用了一种算 子解决电子工程计算中的问题。但由于当时缺 乏数学证明遭到一些数学家的指责。 而另外一些人如卡尔逊、布罗姆维奇等坚信这 一方法的正确性。 后来,法国数学家拉普拉斯从数学上重新给予 该算法严格的数学定义和证明,称之为拉普拉 斯变换或拉氏变换
k 1
E (s)(s p1 ) k D(s)
上式两边对 s 求微分:
d [( s p1 ) k F ( s)] E ( s)(s p1 ) k k 2 K12 (k 1) K1k ( s p1 ) d [ ] / ds 有: ds D( s )
d[( s p1 ) k F (s)] 显然 K12 ds s p
1 d 2 F1 (s) , K13 2 ds2 s1 2
于是 F (s)
3 2 2 2 (s 1)3 (s 1) 2 s 1 s
于是
3 f (t ) t 2e t 2tet 2e t 2 t 0 2
6.6 双边拉氏变换
对信号 f ( t ) ,
K1 sF ( s) |s 0 100 / 3
, K 2 (s 1) F (s) |s 1 20 , K3 (s 3) F (s) |s 3 10 / 3
t 0
f (t ) 100 / 3 20e t 10 / 3e 3t
信号与系统 第六章

ω ω (1 ω ) = +j 2 2 2 (1 ω ) + ω (1 ω 2 ) 2 + ω 2
2
V 1
ω =0
H ( jω )
1 2
U
= U (ω ) + jV (ω )
ωห้องสมุดไป่ตู้
3.极点,零点图(Pole-Zero Plot ) 极点, 极点 系统函数可以表示成有理函数的形式, 系统函数可以表示成有理函数的形式,即
M e , M r 为有限值
∵ r (t ) = e (t ) h (t )
∴ r (t ) = e(t ) h(t ) =
+∞
∫
+∞
∞
e(t τ )h(τ )dτ
+∞ ∞
≤ ∫ e(t τ ) h(τ ) dτ ≤ ∫ h(τ ) dτ M e = M r ∞
∴ 要求
结论: 结论:
除个别孤立的冲激函数外,单位冲激响应都应是有限的 有限的, ∫ 除个别孤立的冲激函数外,单位冲激响应都应是有限的,即
bm s m + bm1s m1 + + b1s + b0 H (S ) = an s n + an1s n1 + a1s + a0 极点——使 H (s ) 为无穷大的 使 极点 零点——使 零点——使 H (s ) 为 0 的 (1)
s 值,即分母多项式等于 的根; 即分母多项式等于0的根 的根;
表示系统函数的方法常用三种方法:频率特性曲线, 表示系统函数的方法常用三种方法:频率特性曲线, 复轨迹和极点零点分布图. 复轨迹和极点零点分布图. 1.频率特性(即系统的频率响应特性) 频率特性(即系统的频率响应特性) 频率特性
信号与系统-第6章信号与系统的时域和频域特性
1.可以将模特性的相乘关系变为相加关系; 2.利用对数坐标的非线性,可以展示更宽范围的频 率特性,并使低频端更详细而高频端相对粗略; 3.对连续时间系统,可以方便地建立模特性和相位 特性的直线型渐近线。 工程中广泛应用的有两种对数模:
ln H( j) lg 单位:奈培(Np) 20lg H( j) lg 单位:分贝(dB) (decibel)
1
- c c
低通
2 2 c
1
- c c 2 c
高通
1
- 2 1 0 1 2
带通
1
- 1 1 2
2
带阻
25
各种滤波器的特性都可以从理想低通特性而来。
离散时间理想滤波器的特性在 区间上,与相应
的连续时间滤波器特性完全相似。
三.理想滤波器的时域特性 以理想低通滤波器为例
1,
H ( j)
二维傅里叶变换的相位
模保持,相位为0的图10
相位保持,模全1的图 像
相位保持,模换为(g)的模
11
6.2 LTI系统频率响应的模和相位表示
(The Magnitude-Phase Representation of the Frequency Response of LTI Systems)
• LTI系统对输入信号所起的作用包括两个方面: 1. 改变输入信号各频率分量的幅度; 2. 改变输入信号各频率分量的相对相位。
无论CTFT还是DTFT,一般情况下都表现为 一个复函数。
X ( j) X ( j) e j X ( j) X (e j ) X (e j ) e j X (e j )
这说明:一个信号所携带的全部信息分别包含在 其频谱的模和相位中。
张宇-信号与系统各章内容整理
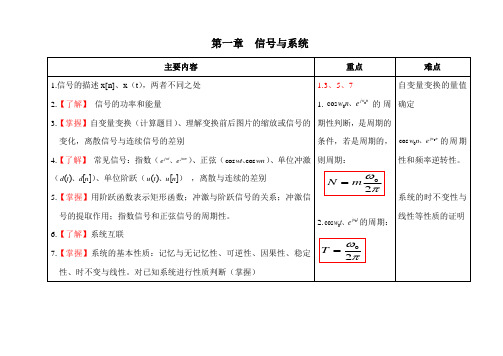
第一章 信号与系统主要内容重点难点1.信号的描述x[n]、x (t ),两者不同之处2.【了解】 信号的功率和能量3.【掌握】自变量变换(计算题目)、理解变换前后图片的缩放或信号的变化,离散信号与连续信号的差别4.【了解】 常见信号:指数(j t j n e e w w 、)、正弦(cos cos t n w w 、)、单位冲激(()[]t n d d 、)、单位阶跃(()[]u t u n 、) ,离散与连续的差别5.【掌握】用阶跃函数表示矩形函数;冲激与阶跃信号的关系;冲激信号的提取作用;指数信号和正弦信号的周期性。
6.【了解】系统互联7.【掌握】系统的基本性质:记忆与无记忆性、可逆性、因果性、稳定性、时不变与线性。
对已知系统进行性质判断(掌握)1.3、5、71.00cos j n n e w w 、的周期性判断,是周期的条件,若是周期的,则周期: 2.00cos j tt ew w 、的周期:自变量变换的量值确定0cos j nn e w w 、的周期性和频率逆转性。
系统的时不变性与线性等性质的证明2T ωπ=2N mωπ=第二章 线性时不变系统第三章 周期信号的傅里叶级数表示FS本章内容安排基本思路:主要内容难点 ✧ 系统的单位冲激响应容易求出:令()()x t t d =,对应的输出即为单位冲激响应() h t ;单位阶跃响应的求解和物理意义; ✧ 将任意信号分解为冲激信号()[]t n d d 、的线性组合[][][]; ()()()k x n x k n k x t x t d d t d t t ¥¥-?=-?=-=-åò✧ 利用LTI 系统的线性和时不变性,在单位冲激响应[]() h t h n 、已知的情况下,推导连续时间和离散时间系统对任意输入x 的响应:[][][]y n =x n * h n ; y(t)=x(t)* h(t)✧ 利用输入输出的卷积关系,根据单位冲激响应[]() h t h n 、,判断ITI 系统的性质✧ 了解线性常系数微分方程和差分方程的时域求解。
信号与系统第六章Z变换

差分方程的稳定性分析
01
稳定性定义
02
稳定性判据
如果一个离散时间系统在输入信号的 作用下,其输出信号不会无限增长, 则称该系统是稳定的。
对于差分方程,可以通过判断其极点 位置和类型来分析系统的稳定性。如 果所有极点都位于复平面的左半部分 ,则系统是稳定的;否则,系统是不 稳定的。
03
稳定性分析的意义
反转性质在通信和控制系统设计中非常有用,因为它允 许我们通过改变信号的方向来改变系统的性能。
卷积性质
卷积性质描述了z变换的卷积特性。如 果两个信号在时间上相乘,那么它们 的z变换就是它们的卷积。
卷积性质在信号处理中非常重要,因 为它允许我们通过将两个信号相乘来 得到一个新的信号。
复共轭性质
复共轭性质描述了z变换的复共轭特性。如果一个信号是实数,那么其z变换就是其复共轭的离散化表 示。
信号与系统第六章z 变换
目录
CONTENTS
• 引言 • z变换的收敛域 • z变换的性质和应用 • z变换与离散时间系统 • z变换与差分方程 • z变换与信号处理
01
引言
背景介绍
ห้องสมุดไป่ตู้
信号与系统是通信、电子、控制等领 域的重要基础课程,其中第六章z变换 是信号与系统中的重要章节之一。
z变换是离散时间信号处理中的一种数 学工具,用于分析离散时间信号和系 统的性质和行为。
离散信号的z变换
离散信号的z变换是将离散时间序列通过z变 换转换为复数序列,用于分析离散时间系统 的特性。
系统的频率响应和极点零点分析
01
系统的频率响应
02
系统的极点和零点
03
系统稳定性分析
通过z变换分析系统的频率响应, 了解系统在不同频率下的性能表 现。
《信号与系统》讲义教案第6章离散信号与系统的Z域分析
第 6 章离散信号与系统的Z 域分析6.0 引言与拉氏变换是连续时间傅立叶变换的推广相对应,Z 变换是离散时间傅立叶变换的推广。
Z 变换的基本思想、许多性质及其分析方法都与拉氏变换有相似之处。
当然, Z 变换与拉氏变换也存在着一些重要的差异。
6.1 双边 Z 变换6.1.1双边Z变换的定义前面讨论过,单位脉冲响应为h[n] 的离散时间 LTI 系统对复指数输入z n的响应y[n]为y[ n]H ( z) z n(6.1)其中H ( z)h[ n] z n(6.2)n式 (6. 2) 就称为 h[n] 的双边 Z 变换。
当 z= e j时, Z 变换就转变为傅立叶变换。
因此一个离散时间信号的双边Z 变换定义为:X ( z)x[ n]z n(6.3)n式中 z 是一个复变量。
而x[n]与它的双边z 变换之间的关系可以记做zx[n]X (z)6.1.2双边Z变换的收敛域x[n] 的双边 Z 变换为一无穷级数,因此存在级数是否收敛的问题,即一方面并非所有信号的Z 变换都存在;另一方面即使某信号的Z 变换存在,但并非Z 平面上的所有点都能使X(z)收敛。
那些能够使X(z)存在的点的集合,就构成了X(z)的收敛域,记为ROC。
只有当式 (6.3) 的级数收敛,X (z) 才存在。
X ( z) 存在或级数收敛的充分条件是x[n]z n(6.4)n在 x[ n] 给定的条件下,式 (6.4)级数是否收敛取决于 z 的取值。
在 z 复平面上,使式 (6.4)级数收敛的 z取值区域就是 X(z)的收敛域。
6.1.3零极点图如果X(z) 是有理函数,将其分子多项式与分母多项式分别因式分解可以得到:N ( z)(z z i )X ( z)i(6.5)M(zD ( z)z p )p则由其全部的零极点即可表示出X ( z) ,最多相差一个常数因子。
在Z 平面上表示出全部的零极点,即构成X ( z) 的几何表示——零极点图。
《信号与系统教案》课件

《信号与系统教案》PPT课件第一章:信号与系统概述1.1 信号的概念与分类信号的定义信号的分类:连续信号、离散信号、随机信号等1.2 系统的概念与分类系统的定义系统的分类:线性系统、非线性系统、时不变系统、时变系统等1.3 信号与系统的研究方法解析法数值法图形法第二章:连续信号及其运算2.1 连续信号的基本性质连续信号的定义与图形连续信号的周期性、奇偶性、能量与功率等性质2.2 连续信号的运算叠加运算卷积运算2.3 连续信号的变换傅里叶变换拉普拉斯变换Z变换第三章:离散信号及其运算3.1 离散信号的基本性质离散信号的定义与图形离散信号的周期性、奇偶性、能量与功率等性质3.2 离散信号的运算叠加运算卷积运算3.3 离散信号的变换离散时间傅里叶变换离散时间拉普拉斯变换离散时间Z变换第四章:线性时不变系统的特性4.1 线性时不变系统的定义与性质线性时不变系统的定义线性时不变系统的性质:叠加原理、时不变性等4.2 线性时不变系统的转移函数转移函数的定义与性质转移函数的绘制方法4.3 线性时不变系统的响应输入信号与系统响应的关系系统的稳态响应与瞬态响应第五章:信号与系统的应用5.1 信号处理的应用信号滤波信号采样与恢复5.2 系统控制的应用线性系统的控制原理PID控制器的设计与应用5.3 通信系统的应用模拟通信系统数字通信系统第六章:傅里叶级数6.1 傅里叶级数的概念傅里叶级数的定义傅里叶级数的使用条件6.2 傅里叶级数的展开周期信号的傅里叶级数展开非周期信号的傅里叶级数展开6.3 傅里叶级数的应用周期信号分析信号的频谱分析第七章:傅里叶变换7.1 傅里叶变换的概念傅里叶变换的定义傅里叶变换的性质7.2 傅里叶变换的运算傅里叶变换的计算方法傅里叶变换的逆变换7.3 傅里叶变换的应用信号分析与处理图像处理第八章:拉普拉斯变换8.1 拉普拉斯变换的概念拉普拉斯变换的定义拉普拉斯变换的性质8.2 拉普拉斯变换的运算拉普拉斯变换的计算方法拉普拉斯变换的逆变换8.3 拉普拉斯变换的应用控制系统分析信号的滤波与去噪第九章:Z变换9.1 Z变换的概念Z变换的定义Z变换的性质9.2 Z变换的运算Z变换的计算方法Z变换的逆变换9.3 Z变换的应用数字信号处理通信系统分析第十章:现代信号处理技术10.1 数字信号处理的概念数字信号处理的定义数字信号处理的特点10.2 现代信号处理技术快速傅里叶变换(FFT)数字滤波器设计数字信号处理的应用第十一章:随机信号与噪声11.1 随机信号的概念随机信号的定义随机信号的分类:窄带信号、宽带信号等11.2 随机信号的统计特性均值、方差、相关函数等随机信号的功率谱11.3 噪声的概念与分类噪声的定义噪声的分类:白噪声、带噪声等第十二章:线性系统理论12.1 线性系统的状态空间描述状态空间模型的定义与组成线性系统的性质与方程12.2 线性系统的传递函数传递函数的定义与性质传递函数的绘制方法12.3 线性系统的稳定性分析系统稳定性的定义与条件劳斯-赫尔维茨准则第十三章:非线性系统13.1 非线性系统的基本概念非线性系统的定义与特点非线性系统的分类13.2 非线性系统的数学模型非线性微分方程与差分方程非线性系统的相平面分析13.3 非线性系统的分析方法描述法映射法相平面法第十四章:现代控制系统14.1 现代控制系统的基本概念现代控制系统的定义与特点现代控制系统的设计方法14.2 模糊控制系统模糊控制系统的定义与原理模糊控制系统的结构与设计14.3 神经网络控制系统神经网络控制系统的定义与原理神经网络控制系统的结构与设计第十五章:信号与系统的实验与实践15.1 信号与系统的实验设备与原理信号发生器与接收器信号处理实验装置15.2 信号与系统的实验项目信号的采样与恢复实验信号滤波实验信号分析与处理实验15.3 信号与系统的实践应用通信系统的设计与实现控制系统的设计与实现重点和难点解析信号与系统的基本概念:理解信号与系统的定义、分类及其研究方法。
《信号与系统教案》课件

《信号与系统教案》PPT课件第一章:信号与系统导论1.1 信号的定义与分类定义:信号是自变量为时间(或空间)的函数。
分类:连续信号、离散信号、模拟信号、数字信号等。
1.2 系统的定义与分类定义:系统是一个输入与输出之间的映射关系。
分类:线性系统、非线性系统、时不变系统、时变系统等。
1.3 信号与系统的研究方法数学方法:微分方程、差分方程、矩阵分析等。
图形方法:波形图、频谱图、相位图等。
第二章:连续信号与系统2.1 连续信号的性质连续时间:自变量为连续的实数。
有限能量:能量信号的能量有限。
有限带宽:带宽有限的信号。
2.2 连续系统的特性线性特性:叠加原理、齐次性原理。
时不变特性:输入信号的延迟不会影响输出信号。
2.3 连续信号的运算叠加运算:两个连续信号的叠加仍然是连续信号。
齐次运算:连续信号的常数倍仍然是连续信号。
第三章:离散信号与系统3.1 离散信号的性质离散时间:自变量为离散的整数。
有限能量:能量信号的能量有限。
有限带宽:带宽有限的信号。
3.2 离散系统的特性线性特性:叠加原理、齐次性原理。
时不变特性:输入信号的延迟不会影响输出信号。
3.3 离散信号的运算叠加运算:两个离散信号的叠加仍然是离散信号。
齐次运算:离散信号的常数倍仍然是离散信号。
第四章:模拟信号与系统4.1 模拟信号的定义与特点定义:模拟信号是连续时间、连续幅度、连续频率的信号。
特点:连续性、模拟性、无限可再生性。
4.2 模拟系统的特性线性特性:叠加原理、齐次性原理。
时不变特性:输入信号的延迟不会影响输出信号。
4.3 模拟信号的处理方法模拟滤波器:根据频率特性对模拟信号进行滤波。
模拟调制:将信息信号与载波信号进行合成。
第五章:数字信号与系统5.1 数字信号的定义与特点定义:数字信号是离散时间、离散幅度、离散频率的信号。
特点:离散性、数字化、抗干扰性强。
5.2 数字系统的特性线性特性:叠加原理、齐次性原理。
时不变特性:输入信号的延迟不会影响输出信号。
第六章信号与系统的时域和频域特性
§6.2 LTI系统频率响应的模和相位表示 主要内容
频率响应的模和相位表示; 线性与非线性相位; 群时延; 对数模与Bode图
5
一、频率响应的模和相位表示
一个信号特征,可以完全由它的模和相位来表示,
而要改变一个信号,从根本上来讲,就是改变它的这两
个方面。 一个LTI系统,对输入信号的改变,包括: 1.改变输入信号各频率分量的幅度 2.改变输入信号各频率分量的相对相位
15
H j ~
20 lg H j ~
单位分贝(dB) decibels 横坐标为频率的指数增长
例如:任意一阶系统的波特图 dy (t ) y (t ) x (t ) dt 1. 时域特性
h(t ) e u (t )
1
t
s (t ) h (t ) u (t ) (1 e )u(t )
带宽范围内,满足不失真条件,则认为该
系统对这一信号是不失真系统。
11
三、群时延 jX j j H j Y ( j ) X j e H j e
线性相位系统可以这样来描述: 它是一个时移系统,它的相位特性 t 0的斜率,就是
该频率分量在时域产生的时移 t 0(或者说延时 t )。 0 那么,信号通过此类系统时,谐波的相移必须与其频
它是一个时移系统它的相位特性的斜率就是该频率分量在时域产生的时移或者说延时那么信号通过此类系统时谐波的相移必须与其频率成正比也即系统的相位特性是一条通过原点的直线
第六章 信号与系统的时域和频域特性 主要内容
傅里叶变换的模和相位表示; LTI系统的模和相位表示; 理想选频滤波器的时域特性;
非理想滤波器的时域和频域特性讨论;
信号与系统-第6章

z3 2z2 1
zz 1z 0.5
,
z 1, 求 f(n).
解:
Fz
z
z3 2z2 1
z2z 1z 0.5
A1 z2
A2 z
A3 z 1
z
A4 0.5
其中
A2
ddzz2
Fz
z
z0
3z2 4z z1z0.5 z3 2z2 1z0.5z1
z12z0.52
z0 6
所以
Fz
6
2 z
8z z 1
σ>0
r>1,θ任意
② s 平面上的实轴映射为 z 平面的正实轴.
jω
Im[z]
1
σ
Re[z]
ω=0, s=σ θ=0, r任意
8
6.2 z 变换的基本性质
1. 线性 a1 f1n a2 f2 n a1F1z a2F2 z
例6-5:求 cos0nUn和 sin0nUn的 z 变换.
解: 欧拉公式 由指数变换:
① z 变换函数在收敛域内是解析函数, 且无任何极点.
② 有限长序列 z 变换的ROC为整个平面, 可能不包括 0 或∞.
③ 因果序列 z 变换的ROC为极点半径圆外.
④ 非因果序列 z 变换的ROC为极点半1 径2圆内.
⑤ 双边序列 z 变换的ROC为极点半径圆环内.
6
3. 常用信号的 z 变换
24
例6-15:已知 yn2yn1 f n
(1) 求H(z) 和 h(n), 并说明因果性与稳定性;
(2) 求因果系统 f(n)=U(n+1)时的零状态响应.
n
n0
由等比级数, 当 az1 1, 即 z a 时才收敛.
信号与系统的应用
信号与系统的应用引言:信号与系统是电子信息工程学科中的基础课程,它研究信号的产生、传输和处理,以及系统对信号的响应和处理。
信号与系统的应用广泛,涵盖了通信、图像处理、音频处理、控制系统等多个领域。
本文将重点介绍信号与系统在通信和图像处理领域的应用。
一、通信领域的应用1. 数字通信:信号与系统在数字通信中起着重要的作用。
通过对信号进行采样、编码和调制,可以将信息转换为数字信号进行传输。
在接收端,通过解调、解码和重构,可以将数字信号还原为原始信息。
这种基于信号与系统理论的数字通信技术,使得信息传输更加高效和可靠。
2. 无线通信:在无线通信中,信号与系统的应用主要体现在信号的调制和解调过程中。
通过选择合适的调制方式,可以将信息信号转换为适合无线传输的信号。
接收端利用解调技术,将接收到的信号恢复为原始的信息信号。
信号与系统理论为无线通信提供了基础和支持,使得人们可以随时随地进行通信。
二、图像处理领域的应用1. 图像采集与传输:信号与系统在图像处理中的第一步是图像的采集与传输。
通过合适的传感器和信号采集系统,可以将现实世界中的光信号转换为数字信号。
这些数字信号经过编码和压缩后,可以通过网络传输到远程设备。
2. 图像增强与复原:信号与系统理论在图像增强与复原中发挥着重要作用。
通过滤波等信号处理技术,可以去除图像中的噪声和干扰,提高图像的质量和清晰度。
同时,信号与系统还可以对模糊图像进行恢复和重建,使得图像更加清晰和可辨识。
3. 图像分析与识别:在图像分析与识别中,信号与系统理论被广泛应用于特征提取和模式识别。
通过对图像进行信号处理和分析,可以提取出图像的特征信息,并进行模式识别和分类。
这些应用包括人脸识别、指纹识别、车牌识别等。
结论:信号与系统的应用涵盖了通信和图像处理等多个领域。
在通信领域,信号与系统的应用使得数字通信和无线通信更加高效和可靠。
在图像处理领域,信号与系统的应用使得图像的采集、处理和分析更加准确和精确。
信号与系统 第6章-作业参考答案

Hd
(z)
=
Hc(z)
s
=1− 1+
z z
−1 −1
证明:H������(z)有一个位于单位圆内的极点和一个位于单位圆外的零点
c)对于系统函数H������(z),证明�H�������ejω�� = 1
证明:
16
第六章 z 变换
第 6 章 习题参考答案
6-4 计算机设计题 答案暂略
17
和 x2(n) = �14�n u(n)
设序列x1(n)的单边和双边 变换分别为 X1( X2(z) 和 X2d (z) 。
1) 根据双边 z 变换的定义和卷积定理,求出g(n) = x1(n) ∗ x2(n); 2) 根据单边 z 变换的定义和卷积定理,求出g(n) = x1(n) ∗ x2(n); 3) 解释 1)和 2)的结果为何不同。 解:
,试用
z
变换的初值
和终值性质确定离散序列 x(n) 的初值 x(0) 和终值 x(∞) 。
6
第六章 z 变换 解:直接求出。
第 6 章 习题参考答案
6-2-26 某离散LTI系统由差分方程
y(n)
−
10 3
y(n)
+
y(n
+
1)
=
x(n)
描述。试求系统的单位样值响应 h(n) ,并确定系统的稳定性。
解:
5
第六章 z 变换
第 6 章 习题参考答案
∞
∑ 6-2-21 序列 x(n) 的自相关序列定义为φxx (n) = x(k)x(n + k) 。试利用 x(n) 的 z 变换 k =−∞
求出φxx (n) 的 z 变换。
解:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
根据相乘性质,则有
Y ( j)
1 2π
X
( j)
UC
( j)
对于载波信号的复指数的傅里叶级数为:
UC ( j) 2π ( c )
因此有
Y ( j) X [ j( c )]
由此可见,已调信号的频谱即为基带信号频谱,只是在频率轴上 位移了一个等于载波频率 c 的量。其调制过程中频谱如 图6-5所示。
图6-5 复指数载波的幅度调制频谱关系
二 正弦载波的幅度调制 对于正弦载波的幅度调制,实现原理如图6-6所示。
U C ( j) π[ ( c ) ( c )]
根据相乘性质,则有
Y
(
j)
1 2
[
X
(
j(
c
))
X
(
j(
c
))]
正弦载波幅度调制过程的频谱关系如图6-7所示
k
这F(就j是)说的,叠Fp加(所j组)成是,频但率在幅的度周上期有函数的T1,变它化由,一如组图移6位-3的所示。
图6-3 时域采样在频域中的效果
三 零阶保持采样
通过冲激串采样可以知道一个限带信号唯一 地可以用它的样本来代表。而实际上,产生 和传输窄而幅度大的脉冲是相当困难的。因 此采用零阶保持采样更为常见些。零阶保持
UC (ej ) 2π ( c 2kπ) k
Fs(j)=
1 Ts
F ( j(ω ns ))
n
零阶保持采样信号 ƒs0(t)可认为是ƒs(t)通过 系统h0(t)=u(t)-u(t-Ts)产生的波形, 即ƒs0(t)= ƒs(t) h0(t)
一般情况下,在通信系统中,只要求幅频特性尽可能满足补偿要求, 而相频特性可以不用满足。我们需要有样本值重建原始信号,这个 过程称为内插,内插可以是近似的也可以是精确的。
y [n]= x[n] uc[n]
分别用X(ejω), Y(ejω)和UC(ejω)来代表x[n],y [n], uc[n]的傅里叶变换,则
Y(jω)=
1
2π
x(e
2π
j
)U
C
(e
j(
)
)d
先考虑载波信号为复指数的正弦信号,由于载波信号uc[n]的傅
里叶变换是一个周期冲激串,即
函数相乘以后就将冲激发生的这一点的信号值采样出来
由时域相乘性质知道
Fp(j)=
1 2π [F(j)P(j)]
而P(j)=
2π
(ω ks )
T k
1
T因为信号与一个单位冲激函数的卷积就是该信号的移位,于是有
Fp()=
1
T
X [ j(ω ks )]
三 脉冲串载波调制
在前面讨论的幅度调制是用正弦载波,另一类重要的幅 度调制技术利用的载波信号是一个脉冲串,如图6-8所示。 这种类型的幅度调制相应于等间隔地传输时隙样本。一般 来说,不能期望任何一个信号都能从这样一组时隙样本中
得到恢复。从上一节采样概念的讨论中得知,如果x(t)
是带限的,并且脉冲重复频率足够高,是可能得到恢复的。
图6-8 脉冲串幅度调制
由图6-8得
y(t)= x(t) uc(t)
由相乘性质可得
Y
(
j)
1 2π
X
(
j)
UC
(
j)
是
UC ( j) 2π k ( kc )
k
Y ( j是) X ( j的) 加权和移位的各部分之和,即
Y ( j) k X[j( kc )] k
采样是在一个给定的瞬间对ƒ(t)采样,并保
持这一样值到下一个样本被采到为止,因此 得到的输出波形具有阶梯形状。如图6-4所示。
图6-4 作为冲激串采样,再紧跟一个具有短形单位冲激响应 的LTI系统的零阶保持
冲激序列抽样信号
ƒs(t)=ƒ(t) (t nTs) n
傅里叶变换为
四 欠采样的效果: 混叠现象
在前面的讨论中,都假定采样频率足够高,因而满足采样
定理的条件。当不满足采样定理,即s≤2M时,x(t)的 频谱不再在抽样信号的频谱中重复,因此利用低通滤波器 也不能把x(t)从采样信号中恢复出来。这时频谱中的某些 项发生重叠,这一现象称为混叠。
2 调制
一般而言,在所有通信系统中,源信息都要首先被某一发射 装置或调制器所处理,以便将它变化到在通信信道上最适合 传输的形式,而在接收端又通过适当的处理将信号给予恢复, 这一过程即为调制与解调。将某一个载有信息的信号嵌入另 一个信号的过程一般称之为调制;而将这个载有信息的信号提 取出来的过程称为解调。 两种重要的调制方法
对于y(t)的频谱类似于周期冲激串采样所得的频谱,唯一的区别在
脉冲串的傅里叶系数值上。脉冲串载波调制频谱如图6-9所示。
四 离散时间调制
一个离散时间幅度调制系统如图6-10所示,其中uc[n]为载波, x[n]为调制信号,y [n]为已调信号。分析连续时间幅度调制
的基础是傅里叶变换的相乘性质,这就是时域内相乘相当频域 内的卷积。由图可得
★弦载波幅度调制 ★脉冲串载波调制。
一 正弦载波幅度调制
以复指数信号或正弦信号uc(t)的振幅被载有信息的信号 x(t)相乘即为调制。信号x(t)为基带信号,uc(t)为载波信 号,已调信号用y(t)表示,则
y(t)= x(t) uc(t)
1.复指数载波的幅度调制 载波信号为复指数形式:
uc (t) e j(ct c )
1 采样 一 采样定理 采样定理:对连续时间信号进行数字处理,必须首先对信号
进行抽样。所谓“抽样”就是利用抽样脉冲序列P(t)从连续信号 ƒ(t)中“抽取”一系列的离散样值,这种离散信号通常称为“抽样
信号”,如图6-1所示。
图6-1 采样过程
二 冲激串采样
为了对连续时间信号在均匀间隔上 采样,一种有用的办法是通过用一 个周期冲激串去乘待采样的连续时
间信号ƒ(t) 。这一方法称为冲激串
采样如图6-2所示。该周期冲激串
P(t) 称为采样函数,周期T称为采 样周期,而P(t) 的基波频率 s=2/T称为采样频率。
图6-2 冲激串采样
在时域中有
ƒp(t) =ƒ(t)p(t)
其中
P(t)= (t nT )
n
由单位冲激函数的采样性质可知,ƒ(t)被一个单位冲