结构力学6位移法和力矩分配法
结构力学中位移法与力矩分配法的关系分析

文章编号:1009 ̄6825(2020)20 ̄0059 ̄03结构力学中位移法与力矩分配法的关系分析收稿日期:2020 ̄07 ̄13:北部湾大学高等教育本科教学改革工程项目«土木工程系统性教学案例设计研究与实践»(项目编号:17QJGB14)作者简介:姚展环(1998 ̄)ꎬ女ꎬ在读本科生ꎻ㊀杨㊀威(1999 ̄)ꎬ男ꎬ在读本科生ꎻ㊀冯章标(1997 ̄)ꎬ男ꎬ在读本科生ꎻ㊀凌志丹(1998 ̄)ꎬ女ꎬ在读本科生ꎻ㊀农妍妹(1998 ̄)ꎬ女ꎬ在读本科生姚展环㊀杨㊀威㊀冯章标㊀凌志丹㊀农妍妹(北部湾大学建筑工程学院ꎬ广西钦州㊀535011)摘㊀要:超静定结构的求解方法在综合考虑平衡条件㊁几何条件和物理条件的情况下日益增多ꎬ为此需要建立近似状态使其求解方法简化ꎮ通过研究位移法的计算过程ꎬ引入曲率半径㊁转动刚度㊁分配系数和传递系数将位移法求解过程中的方程消除ꎬ从而得到不必解算联立方程的近似解法 力矩分配法ꎮ力矩分配法不必联立方程ꎬ计算步骤简单ꎬ可以直接求得杆端弯矩ꎬ大大降低了求解问题的难度ꎮ关键词:位移法ꎬ力矩分配法ꎬ超静定结构中图分类号:TU311文献标识码:A0㊀引言目前ꎬ计算超静定结构的精确方法主要是位移法ꎬ位移法的思想是法国的纳维于1826年提出的ꎬ其基本未知量包括节点的角位移和独立节点的线位移ꎮ但现实中大多数为多层多跨的结构体系ꎬ有多个未知量ꎬ需要列多个位移法方程来求解ꎮH.克罗斯于1930年在位移法的基础上ꎬ提出了不必解方程组而是逐次逼近的力矩分配法ꎬ大大地减轻了工程的计算工作ꎮ位移法和力矩分配法的共性和特性给我们提供了一个建立二者关系的视角ꎮ两者都需借助不平衡力矩以及查询形常数表和载常数表来获取形常数载常数来计算结构内力ꎮ但两者性质不同ꎬ位移法是精确解法ꎬ是以节点的角位移和独立节点的线位移作为基本未知量ꎮ而力矩分配法是近似解法ꎬ主要是通过对刚节点施加阻止转动的约束得到各固端弯矩ꎬ并分配传递至各刚结点平衡ꎮ通过研究位移法的计算过程ꎬ引入曲率半径㊁转动刚度㊁分配系数和传递系数将位移法求解过程中的方程消除ꎬ从而得到不必解算联立方程的近似解法 力矩分配法ꎮ本文将以例题展开讨论位移法和力矩分配法之间的关系ꎮ1㊀位移法计算过程位移法是以结构的结点位移为基本未知量ꎻ以结点和截面的平衡方程为基本方程ꎬ据以求出结点位移ꎻ最后求出结构的内力ꎮ其最大的特点在于:位移法的思路是先通过加入附加联系固定所有独立结点位移ꎬ此时各附加联系上将产生附加反力(不平衡反力)ꎬ为消除这些附加反力ꎬ同时放松各结点(即同时取消所有附加联系)ꎬ从而同时消除各附加联系上的附加反力ꎮ若附加联系不止一个ꎬ则必须求解联立的位移法典型方程[3]ꎮ例题:用位移法计算如图1所示连续梁的弯矩ꎮ1)基本体系(见图2):2)位移法方程:k11Δ1+F1P=0(1)其中ꎬΔ1为连续梁结点B角位移ꎻk11为基本结构在单位转角Δ1=1作用下在附加约束中的约束力矩ꎻF1P为基本结构在荷载作用下在附加约束中的约束力矩ꎮ图1原结构AqCBll图2位移法基本体系ABCq3)计算k11ꎬF1P(见图3~图6):图3Δ1=1作用的M 1图AC3i3i图4计算k 11k 113i3iB由结点B的力矩平衡可得:ðMB=0ꎬk11=3i+3i=6i(2)由结点B的力矩平衡可得:ðMB=0ꎬF1P=ql2/8(3)95 ㊀㊀㊀㊀第46卷第20期2020年10月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀山西建筑SHANXI㊀ARCHITECTURE㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀Vol.46No.20Oct.㊀2020图5荷载作用的M PA Cql 2/8ql 2/16图6计算F 1PF 1PBql 2/84)计算Δ1:Δ1=-F1P/k11=-ql2/48i(4)5)作M图(如图7所示):由弯矩的叠加原理:M=M1Δ1+MP(5)其中ꎬM1为基本结构在单位转角Δ=1中任一截面上所产生的弯矩ꎻ由形常数表可查得ꎮMP为荷载在基本结构中相应截面上所产生的弯矩ꎮMBA=3iˑ(-ql2/48i)+ql2/8=ql2/16(6)MBC=3iˑ(-ql2/48i)=-ql2/16(7)其中ꎬMBA为AB杆的B端弯矩ꎻMBC为BC杆的B端弯矩ꎮ图7弯矩图ACBql 2/163ql 2/322㊀力矩分配法计算过程力矩分配法的求解思路则有所不同ꎬ第一步先约束所有独立结点角位移ꎬ得到基本结构ꎬ显然各结点将产生不平衡力矩ꎮ为了使基本结构转化为原结构ꎬ必须消除各结点不平衡力矩(因为原结构中不存在这些不平衡力矩)[3]ꎮ由例题ꎬ1)先在B结点加上阻止转动的约束(见图8):图8力矩分配法基本体系ACBqMFBA=ql2/8(8)其中ꎬMFBA为在结点B加上阻止转动的约束时ꎬ由荷载产生的固端弯矩ꎮ2)松开结点B:相当于结点B施加一个力偶荷载-ql2/8ꎮ转动刚度:SBA=3iBA=3i(9)BBC=3iBC=3i(10)其中ꎬSBA为AB杆B端的转动刚度ꎻSBC为BC杆B端的转动刚度ꎮ分配系数:μBA=SBA/(SBA+SBC)=3i/(3i+3i)=0.5(11)μBC=SBC/(SBA+SBC)=3i/(3i+3i)=0.5(12)其中ꎬμBA为AB杆在B端的分配系数ꎻμBC为BC杆在B端的分配系数ꎮðμ=μBA+μBC=1(13)分配弯矩:MᶄBA=0.5ˑ(-ql2/8)=-ql2/16(14)MᶄBC=0.5ˑ(-ql2/8)=-ql2/16(15)其中ꎬMᶄBA为AB杆B端的分配弯矩ꎻMᶄBC为BC杆B端的分配弯矩ꎮ传递弯矩均为0ꎮ即:MᶄCB=0(16)MᶄAB=0(17)其中ꎬMᶄCB为BC杆C端的传递弯矩ꎻMᶄAB为AB杆A端的传递弯矩ꎮ计算过程见图9ꎮ图9力矩分配的计算格式AC0.50.5B000000ql 2/8-ql 2/16-ql 2/16ql 2/16-ql 2/16ðMB=ql2/16-ql2/16=0(18)3㊀位移法与力矩分配法关系分析位移法与力矩分配法均运用了不平衡力矩ꎬ都借助不平衡力矩来计算结构内力ꎮ两者都需要查询形常数和载常数表来获取形常数载常数以便计算ꎮ由式(2)ꎬ图4可知:k11=ði(19)由式(3)ꎬ图6可知:F1P=-M(20)由式(4)ꎬ式(19)ꎬ式(20)得:Δ1=-F1P/K11=M/ði(21)由式(5)ꎬM1由形常数表可查得ꎬ因此设:M1=ii(22)由式(21)ꎬ式(22)可得:M1Δ1=iiΔ1=iiM/ði(23)由曲率K表示单位弧段上切线转过角度的大小作如下定义:K=Δα/Δs(24)06 第46卷第20期2020年10月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀山西建筑㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀其中ꎬK为杆件中性层的曲率ꎻΔα为转角增量ꎻΔs为弧长增量ꎮ由曲率与曲率半径的互为倒数的关系有:K=1/ρ(25)其中ꎬρ为杆件中性层的曲率半径ꎮ由式(24)ꎬ式(25)得:1/ρ=Δα/Δs(26)或:Δα=Δs/ρ(27)由转动刚度S为单位转角所需的力矩作如下定义:S=M/Δα(28)由杆件的弯矩:M=EI/ρ(29)其中ꎬE为材料的弹性模量ꎻI为杆件截面的惯性矩ꎮ由式(27)~式(29)得:S=M/Δα=(EI/ρ)/(Δs/ρ)=EI/Δs(30)由可变形固体的小变形假设由Δsʈ1ꎬ因此得:S=EI/ΔsʈEI/l=i(31)由力矩分配系数μ为同一刚结点上的某一根杆的转动刚度与所有杆的转动刚度和的比值ꎬ作如下定义:μ=Si/ðSi=ii/ði(32)由式(23)得分配弯矩:M1Δ1=μMꎮ令Mᶄ远=μM即:Mᶄ远=M1Δ1(33)其中ꎬMᶄ远为所求杆端的远端分配弯矩ꎮ对于等截面杆件ꎬ由于均匀性假设与影响线ꎬ可知同一杆件弯矩变化为线性变化ꎬ由相似原理ꎬ与传递系数C表示当杆件近端产生转角时ꎬ杆件远端弯矩与近端弯矩的比值作如下定义ꎬ即:C=i远/i近=Mᶄ远/Mᶄ近ꎮ得:M远=CˑMᶄ近(34)其中ꎬMᶄ近为节点近端的分配弯矩ꎮ因为位移法中荷载在基本结构中相应截面上所产生的弯矩MP与力矩分配法中在节点加上阻止转动的约束后由荷载产生的固端弯矩MF均由等截面直杆的载常数可查得ꎬ即:MP=MF(35)由式(33)ꎬ式(35):MP+M1Δ1=MF+Mᶄ(36)其中ꎬMᶄ为远端或近端的分配弯矩ꎮ故位移法与力矩分配法的计算结果相同ꎮ对于多结点的体系ꎬ由于其处于平衡状态ꎬ即每个结点的内力与外力合力为0ꎬ所以当结点合力不近似于0时ꎬ不为0的合力矩继续传递直至结点合外力近似等于0ꎮ最终累加各杆端所得的分配弯矩可得各杆端弯矩ꎮ4㊀结语位移法是通过平衡条件建立位移法方程ꎬ取隔离体来计算不平衡力矩ꎮ而力矩分配法是在位移法的基础上引入曲率半径㊁转动刚度㊁分配系数与传递系数将位移法求解过程中的方程消除ꎬ所以力矩分配法不需要列方程ꎬ只需按照分配系数来分配不平衡力矩ꎬ但计算过程相对繁杂ꎬ需要很强的细心及耐心ꎮ致谢:本文是在蒋琼明博士的指导下完成的ꎬ在此表示深深的感谢ꎮ参考文献:[1]㊀包世华ꎬ熊㊀峰ꎬ范小春.结构力学教程[M].武汉:武汉理工大学出版社ꎬ2017.[2]㊀陈玉骥.力矩分配法教学中体现其数学意义的方法[J].长沙铁道学院学报(社会科学版)ꎬ2003ꎬ4(4):98 ̄99.[3]㊀同济大学数学系.高等数学第七版上册[M].北京:高等教育出版社ꎬ2014.[4]㊀孙训方ꎬ方孝淑ꎬ关来泰.材料力学(Ⅰ)[M].第5版.北京:高等教育出版社ꎬ2009.ModifiediterativeinitialvaluesforthereliabilitycalculatingofmarineconcretestructuresYaoZhanhuan㊀YangWei㊀FengZhangbiao㊀LingZhidan㊀NongYanmei(CollegeofCivilEngineeringandArchitectureꎬBeibuGulfUniversityꎬQinzhou535011ꎬChina)Abstract:Thesolutionmethodsofstaticallyindeterminatestructuresareincreasingundertheconditionofcomprehensiveconsider ̄ationofequilibriumconditionsꎬgeometricconditionsandphysicalconditions.Bystudyingthecalculationprocessofdisplacementmethodꎬthecurvatureradiusꎬrotationstiffnessꎬdistributioncoefficientandtransfercoefficientareintroducedtoeliminatethee ̄quationintheprocessofdisplacementmethodꎬsothattheapproximatesolutionofsimultaneousequationwithoutsolvingmomentdistributionmethodisobtained.Themomentdistributionmethoddoesnotneedsimultaneousequationsꎬthecalculationprocedureissimpleꎬandthemomentattheendoftherodcanbecalculateddirectlyꎬwhichgreatlyreducesthedifficultyofsolvingtheprob ̄lem.Keywords:displacementmethodꎬmomentdistributionmethodꎬstaticallyindeterminatestructure16 ㊀㊀㊀第46卷第20期2020年10月㊀㊀㊀㊀㊀㊀㊀㊀姚展环等:结构力学中位移法与力矩分配法的关系分析。
第6章 位移法

1
60kN 1
21kN/m
1
150kN.m 2
1.5
1
3
弯矩,作弯矩图。
已知各杆线刚度:梁 为1,柱为1.5。 (2)固端弯矩为
F 01
2m 2m 4
1.5
5m
5
8m (a)荷载图
4m
2m
2。 解:(1)基本未知量为 1 、
3 1 F M Pl 90kN m M Pl 30kN m 10 8 8 1 F F M 12 21 64 112kN m M 21 112kN m 12 F M 23 50kN m
上式称为等截面直杆的转角位移方程,反映杆端力与杆 端位移间的关系。其中固端弯矩和剪力与跨间荷载有关,称 为载常数。常用荷载下的载常数见表 6.1。
6.2 等截面直杆的转角位移方程
6.2.2 转角位移方程的简化
转角位移方程 (6.2) 适用于两端均为刚结点的一般形式, 对
于下列两种特殊情况,方程形式可以简化。
6.3 连续梁和无侧移刚架的计算
(3)建立位移法方程
结点1: F M12 4i21 2i22 M12 41 22 112 M14 4 1.51 61
F M10 i11 M10 1 90
(e) (f)
结点 1 的力矩平衡方程:
0 2m
30kN
7.2kN/m 1 2 2m
20kN
3 2m
2 4m (a)荷载图
1.5
3
3m
6.3 连续梁和无侧移刚架的计算
(3) 利用转角位移方程(6.2),写出结点 1 和结点 2 相关 杆件的近端弯矩,并按力矩平衡条件建立基本方程。
《结构力学》内容总结及难点分析

黑龙江教育·理论与实践2016.11《结构力学》是土木工程专业的一门重要专业基础课,要求学生掌握杆件体系内力与位移计算。
学习该课程不能靠死记硬背,必须在吃透概念的基础上熟练掌握结构的分析能力。
下面归纳总结各部分内容的基本概念、重点和难点,希望能对学生的学习起指导作用。
一、结构的几何组成分析总体上,可通过下面两种方法来分析平面体系的几何组成特点。
(一)通过计算自由度来进行几何组成分析需要提醒W≤0只是保证平面体系为几何不变的必要条件,此时确定体系是否几何不变,尚需运用几何组成规则进行进一步分析。
同时要注意:当只考虑结构体系本身,不存在或不考虑结构的支座时,则体系为几何不变的必要条件是W≤3。
(二)运用几何不变体系的组成规则进行几何组成分析要掌握并能灵活运用三个组成规则。
实际上三规则为同一规则(铰结三角形规律),只是表述方式不同。
对体系进行几何组成分析时,要注意:1.三个组成规则对应的限制条件;2.刚片可以是单个杆件,也可以是一几何不变结构部分;3.特别注意复铰、虚铰及无穷远虚铰的特性。
二、静定结构的内力和位移计算静定结构的内力分析和位移计算是超静定结构及其他问题的分析和计算基础。
(一)静定梁及钢架1.内力及内力图。
要求熟练计算内力,并掌握用分段叠加法快速绘制内力图。
因为这也是结构的强度计算、位移计算、超静定问题的求解、结构的动力计算等方面的基础。
要学会分段叠加法,必须根据荷载和内力间的微分关系,熟练掌握每种典型荷载(无荷载、均布荷载、集中力及集中力偶)作用下的梁段内力图特征。
弯矩图要画在杆件受拉纤维的一侧,不标注正负号;而剪力图和轴力图可画在杆件任一侧,但必须标注正负号。
尤其要熟练掌握弯矩图的绘制,因为根据静力平衡条件,若取杆件为隔离体,由弯矩图可求出剪力并作剪力图;而由剪力图可求出轴力并作轴力图,所以作内力图(桁架结构除外)最终可归结为作弯矩图。
另外,内力求解时要注意定向支座的特性。
2.位移计算。
结构力学——力矩分配法分解
3 . 一般最终的杆端力矩与固端力矩是同量级的,要求精确 到三位有效数字,计算中取4位计算,以保证前三位的 精确度
第三节 多结点力矩分配法
计算的指导思想由两个步骤说明:
固定状态的计算(与单点固定一样)。
即刚臂→荷载→固端力矩→约束力矩;
100k0N
EI
1 EI
2 EI
0.43 0.57 0.57 0.43
-500 -1000
M3B=1000
例题:有支座移动(已知结点线位移)E=200GPa,I = 2500cm4
绘制弯矩图。
A
B
C
D
EI
EI
=1cm
10m
10m
10m
0.429 0.571
0.571 0.429
MF
3000
3000 -1500
2 . 不相邻 点可同时 释放.
例题:用力矩分配法求图示结构弯矩图(利用传递系数的概念) 。
A
EI
10m
1 EI
10m
100k0N 2 EI 3 B 3B是悬臂梁,
转动结点3 时,
10m 1m 悬臂可自由转
0.43 0.57 0.5 0.5 1 0
动,固其转动
MF
1000 刚度为零
或A
MF
100k0N
放松状态的计算(与单点放松不同)。
力矩的分配和传递是在远端约束已知的情况下进行的, 因此,分配单元的相邻结点不应同时放松。每次只能 放松一个结点,同时相邻结点保持固定,所以,整个 放松过程是轮流放松每一个结点来逐步完成的。
第三节 多结点力矩分配法
结构力学第六章超静定结构的计算——力矩分配法
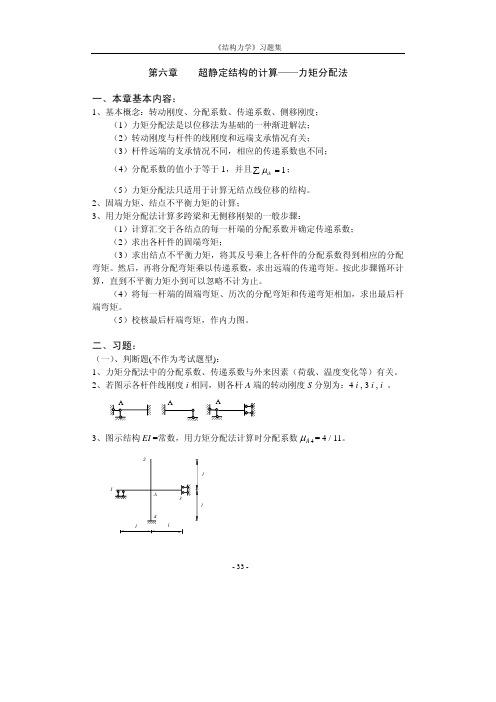
《结构力学》习题集- 33 -第六章 超静定结构的计算——力矩分配法一、本章基本内容:1、基本概念:转动刚度、分配系数、传递系数、侧移刚度;(1)力矩分配法是以位移法为基础的一种渐进解法;(2)转动刚度与杆件的线刚度和远端支承情况有关;(3)杆件远端的支承情况不同,相应的传递系数也不同;(4)分配系数的值小于等于1,并且1=∑ik μ;(5)力矩分配法只适用于计算无结点线位移的结构。
2、固端力矩、结点不平衡力矩的计算;3、用力矩分配法计算多跨梁和无侧移刚架的一般步骤:(1)计算汇交于各结点的每一杆端的分配系数并确定传递系数;(2)求出各杆件的固端弯矩;(3)求出结点不平衡力矩,将其反号乘上各杆件的分配系数得到相应的分配弯矩。
然后,再将分配弯矩乘以传递系数,求出远端的传递弯矩。
按此步骤循环计算,直到不平衡力矩小到可以忽略不计为止。
(4)将每一杆端的固端弯矩、历次的分配弯矩和传递弯矩相加,求出最后杆端弯矩。
(5)校核最后杆端弯矩,作内力图。
二、习题:(一)、判断题(不作为考试题型):1、力矩分配法中的分配系数、传递系数与外来因素(荷载、温度变化等)有关。
2、若图示各杆件线刚度i 相同,则各杆A 端的转动刚度S 分别为:4 i , 3 i , i 。
AA A3、图示结构EI =常数,用力矩分配法计算时分配系数4 A μ= 4 / 11。
1l ll第六章 力矩分配法- 34 -4、图示结构用力矩分配法计算时分配系数μAB =12/,μAD =18/。
BCA D E =1i =1i =1i =1i5、用力矩分配法计算图示结构,各杆l 相同,EI =常数。
其分配系数μBA =0.8,μBC =0.2,μBD =0。
A B CD6、在力矩分配法中反复进行力矩分配及传递,结点不平衡力矩愈来愈小,主要是因为分配系数及传递系数< 1。
7、若用力矩分配法计算图示刚架,则结点A 的不平衡力矩为 −−M Pl 316。
结构力学——力矩分配法
结构力学——力矩分配法结构力学是研究物体在外力作用下的变形和破坏行为的学科。
其中,力矩分配法是一种求解结构梁的内力和变形的常用方法之一、本文将介绍力矩分配法的基本理论和应用。
首先,对于结构力学的研究,我们需要了解一些基本概念。
力矩是由力的作用点与旋转轴之间的距离和力的大小决定的。
在结构力学中,我们通常考虑作用在梁上的力和力矩。
梁是一种常见的结构元件,可以将其看作是在两个固定点之间作用的力的集合。
在力矩分配法中,我们将梁分割成若干个小段,然后逐段计算每个小段的内力和变形。
假设有一根长度为L,截面形状均匀的梁,并且在两个固定点之间施加了一系列分布力。
我们可以将梁分割成n个小段,每个小段的长度为Δx=L/n。
接下来,我们需要计算每个小段的内力和变形。
首先,我们可以根据材料力学的基本原理得出梁的拉伸、压缩和弯曲的力学方程。
然后,我们可以根据小段的切线方向和切线上的任意一点来推导出该小段的内力和弯曲方程。
最后,我们将内力分量在小段两端的力矩分配系数和位置矩分配系数进行合成,从而得出该小段的内力和弯曲方程。
在力矩分配法中,一个重要的概念是力矩分配系数。
力矩分配系数是一个无量纲的参数,用来表示力和力矩在小段两端分配的比例。
在计算力矩分配系数时,我们可以根据梁的几何形状和分布力的位置,利用力矩的基本原理进行推导。
力矩分配系数是力矩分配法的核心,它可以帮助我们计算出每个小段的内力和变形。
在实际应用中,力矩分配法通常用于求解多跨梁的内力和变形。
我们可以将多跨梁分割成若干个小段,并根据力矩分配法计算出每个小段的内力和变形。
然后,我们可以将各个小段的内力和变形进行叠加,得出整个多跨梁的内力和变形。
需要注意的是,力矩分配法具有一定的局限性。
首先,它只适用于存在弯曲变形的梁,对于其他类型的结构,如框架和板,需要采用其他的分析方法。
其次,力矩分配法仅适用于分布力作用在梁的直线部分上,对于弯曲部分或非均匀分布力的情况,需要采用其他的方法进行分析。
结构力学第六章力法
弯矩图可按悬臂梁画出
M X1 M 1 M P
§6-4 力法计算超静定桁架和组合结构
一 超静定桁架
F Ni l ii EA F N i F N jl ij EA F N i FN P l iP EA
2
桁架各杆只产生轴力,系数
典型方程: 11 X 1 1P 0
9 17 FP , X 2 FP 80 40
叠加原理求弯矩: M X 1 M 1 X 2 M 2 M P
3FPL/40 3FPL/40
FP 9FP/80
23FP/40 FNDC
FQDC 3FPL/80 FQBD
FQCD FNDA
FQBD=-9FP/80
FNBD=-23FP/40
FQDC=3FP/40+FP/2=23FP/40
2 P 3P 0
11 X 1 1P 0 22 X 2 23 X 3 0 X X 0 33 3 32 2
11 X 1 1P 0 X 2 X 3 0
反对称荷载作用下, 沿对称轴截面上正对称内力为0 例: FP FP/2 FP/2 FP/2
1)一般任意荷载作用下
11 X 1 12 X 2 13 X 3 1P 0 21 X 1 22 X 2 23 X 3 2 P 0 X X X 0 33 3 3P 31 1 32 2
11 X 1 1P 0 22 X 2 23 X 3 2 P 0 X X 0 33 3 3P 32 2
M FN
超静定结构的内力分布与梁式杆和二力杆的相对刚度有关。 链杆EA大,M图接近与连续梁,链杆EA小,M图接近与简支梁。 例: 中间支杆的刚度系数为k,求结点B的竖向位移?EI=C
结构力学第六章
超静定结构
Analysis of Statically Indeterminate Structures
概述
一.超静定结构的静力特征和几何特征
几何特征:有多余约束的几何不变体系。 静力特征:仅由静力平衡方程不能求出 所有内力和反力。
超静定问题的求解要同时考虑结构的“变形、本构、 平衡”三大关系。
3
X1 1
M 1 m
6
6
1P
M 1M P 702 dx EI EI
2 P
M 2M P 520 dx EI EI
X2 1
M 2 m
4)、 解方程
135X 1 144 X 2 520 0.......... ....2
207 X 1 135X 2 702 0.......... .....1
X 1 2.67k N X 2 1.11k N
5)、内力
M M1 X1 M 2 X 2 M P
4.33 1.33 5.66 3.56
M kN m
2 2.67
1.11
3.33 3.33
3.33
1.9
1.11
1.9
2.67
FQ k N
FN k N
2. 排架
X2
X1
X2
X1
比较法: 与相近的静定结构 相比, 比静定结构 多几个约束即为几 次超静定结构。
多余约束的位置不固定
去掉几个约束后成 为静定结构,则为 几次超静定 X1 X2 X3 X3 去掉一个链杆或 切断一个链杆相 当于去掉一个约 束
X1
X2
X1
X2
X3
X1
X2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
△
4、5、6 三个固定端都是不动的点,结点 1
2△
3△
1、2、3均无竖向位移。又因两根横梁其
长度不变,故三个结点均有相同的水平位 移△ 。Biblioteka FP456
(a)
事将实结上构,的图刚(a结)所点示(包结括构固的定独支立座线)都位变移成数
铰目结,点与(图成(为b)铰所结示体铰系结)体,则系使的其线成位为移几数何目不 变是添相加同的的最。少因链此杆,数实,用即上为为原了结能构简的捷独地立确
线定位出移结数构目的(独见立图线b)位。移数目,可以
7
(b)
返回
ZZ1 1
Z 1Z 1
FF11
CC
DD
CC
DD
FF22
BB
BB ZZ2 2
EE Z2Z2
EE
AA
FF
AA
FF
结构有四个刚结点——四个结点角位移。
需增加两根链杆, 2个独立的线位移。
位移法的基本未知量的数目为6个。
需注意:对于曲杆及需考虑轴向变形的杆件, 变形后两端之间的距离不能看作是不变的。
D l
l
1
FC
B
B
F
C
B B
l/ 2 l/2
A
l/ 2 l/ 2
三次超静定图示刚架
力 法:三个未知约束力。 位移法:一个未知位移(θB)。
l
力法与位移法必须满足的条件:
1.力的平衡; 2. 位移的协调; 3. 力与位移的物理关系。
位移法的基本假定:
(1)对于受弯杆件,只考虑弯曲变形,忽略轴向变形和剪切变形的影响。
例如 ( 见图a) 基本未知量三个。
2
3
5
6
(a)
3
4
1 2
又例如(见图b)
共有四个刚结点,结点线位移数目为二 ,基本未知量为六个。基本结构如图所 示。
5
6
7
(b)
返9回
例:确定图a所示连续梁的基本结构。
AA
BB CC
DD
(图a)
AA BB
CC
D D
(图b)
基基本本结结构构
在确定基本结构的同时,也就确定了基本未知量及其数目。
B
MBA
结构将将4的A(θElB弯6I回-矩1)代B图l/代2入。4入公再El式l式/I利2((用B66-平-12))衡F则8l得条各件杆0A作的出于杆剪是端力弯图矩B 和即轴可6F4力确lE2图I定。。然后可利用叠加法3作出原
以图示刚架为例予以说明 刚架在荷载FP作用下将发生如虚线所示的 变形在。刚结点1处发生转角Z1,结点没有线 位移。则12杆可以视为一根两端固定的梁 (见图)。
8
2.位移法的基本结构
用位移法计算超静定结构时,每一根 1 杆件都视为一根单跨超静定梁。因此,
位移法的基本结构就是把每一根杆件都
暂时变为一根单跨超静定梁(或可定杆件)
。通常的做法是,在每个刚结点上假想
地加上一个附加刚臂(仅阻止刚结点转动 ),同时在有线位移的结点上加上附加支座
4
链杆(阻止结点移动)。
(2)变形过程中,杆件的弯曲变形与它的尺寸相比是微小的(此即小变形假 设),直杆两端之间的距离保持不变。
注意:上述变形假定不是必要的,这样做仅仅是为了减少基本未知量,简化计算。
2
二、位移法的基本思路
B
B B
FC
θB为位移法基本未知量(规 l
定顺时针转向为正)。
A
由变形协调条件知,各杆在结 点B 端有共同的角位移θB。
其受荷载FP作用和支座1发生转角Z1这两 种情况下的内力均可以由力法求。同理, 13杆可以视为一根一端固定另一端铰支的 梁(见图)。 而在固定端1处发生了转角Z1,其内力同 样由力法求出。
可见,在计算刚架时,如果以Z1为基本未 知量,设法首先求出Z1,则各杆的内力即 可求出。这就是位移法的基本思路。
1
Z1
3
Z1
FP
1
Z1
2
FP
1
2
Z1
Z1 EI=常数
3
ll 22
返4回
由以上讨论可知,在位移法中须解决以下问题:
(1)用力法算出单跨超静定梁在杆端发生各种位移时以及荷载等因素作用下的 内力。见第五章。 (2)确定以结构上的哪些位移作为基本未知量。 (3)如何求出这些位移。 下面依次讨论这些问题。
返5回
l/ 2 l/ 2
B
B B
A
B
F
B
将原结构视为两个单跨超静定梁的组合。各杆的杆端弯矩为:
M BC
M BA
4EI
l
B
4
EI l
B
B
F
Fl 8
C
M CB
2EI l
B
Fl 8
M
ABB
2EI l
B
(6-1)
考虑结 B点B 的B 平衡条件, 由∑MB B=0B, B
F
B
MBC
有
M BA
M BC
0(6-2)
这样,结构独立角位移数目就等于结构刚结点的数目。
1
2
例如图示刚架
独立的结点角位移数目为2。
4
5
3
6
返6回
(2)独立线位移数目的确定(观察法、换铰法。)
在一般情况下,每个结点均可能有水平和竖向两个线位移。但通常对受弯 杆件略去其轴向变形,其弯曲变形也是微小的,于是可以认为受弯直杆的长 度变形后保持不变,故每一受弯直杆就相当于一个刚性链杆,从而减少了结 点的线位移数目,故结点只有一个独立线位移(侧移)。例如(见图a)
EI
10
§6-3 位移法的典型方程及计算步骤
一、位移法的基本方程
1. 无侧移刚架
基本未知量——结点B 转角θB ,设其为Z1 。在结点B 附加刚臂得基本结构。
原结构 原结构
基本结构 基本结构
基本体系 基本体系
基本体系是指基本结构在荷载和基本未知位移共同作用下的体系。
§6—2 位移法基本未知量的确定
1.位移法的基本未知量
在位移法中,基本未知量是各结点的角位移和线位移。计算时,应首先确 定独立的角位移和线位移数目。 (1) 独立角位移数目的确定
由于在同一结点处,各杆端的转角都是相等的,因此每一个刚结点只有一个独 立的角位移未知量。在固定支座处,其转角等于零为已知量。至于铰结点或铰支 座处各杆端的转角,由上节可知,它们不是独立的,可不作为基本未知量。
§6—1 位移法的基本概念
一、位移法的提出(Displacement Method)
力法和位移法是分析超静定结构的两种基本方法。力法于十九世纪末开始应用 ,位移法建立于上世纪初。
力法—以多余未知力为基本未知量,由位移条件建立力法方程,求出未知力,
计算出全部的内力和相应的位移。
位移法以—某些结点位移(角位移和线位移)为基本未知量,由结点或截面的平衡
条件建立位移法方程,求出未知位移后再计算内力。
位移法主要是由于大量高次超静定 刚架的出现而发展起来的一种方法。由 于很多刚架的结点位移数远比结构的超 静定次数少,采用位移法比较简单。
F l/2
A
B
C
EI = 常数
l
结点B只转动一个角度,没有水平和竖向位移。 力 法:六个未知约束力。 位移法:一个未知位移(θB)。