工程光学2008(第二章平面光学系统)
工程光学第二章
高斯公式
1 1 1 l l f
y l yl
牛顿与高斯公式的转换: x l f ......x l f
当系统确定时,f
可根据公式,改变 x(l) 可得到不同β, 或β按要求,可计算出相应的 x(l) .
例:有一理想光组,其焦距为 f f 75mm
其前方150mm处有一物高为20mm的物体,
求像的位置和大小.若要求 0.5x 问物体应位于何处?
解:
1)根据 1 1 1 l l f
Q Q' B y
A
F
H H'
F
A'
l 150mm
-y'
f 75mm
R
R'
-x
-f
f'
B' x'
l 150mm
-l
l 1 l
一个理想光学系统可以用其基点(面)来表示,而 不需考虑其具体结构如何。
O
B O2
O1 A
A'
O' B' O'2
M
图2-3 两对共轭面已知的情况
O
B
A
O3
O1 O2
O'
A'
B'
M
图2-4 一对共轭面及两对共轭点已知的情况
第二节 理想光学系统的基点和基面
一.焦点与焦平面
1.像方焦点与像方焦平面(对应 L=-∞)
l x f 902.605mm
以O1为原点! 以H 为原点!
x f 8.2055mm l x f 90.2605mm
L=-∞ F'
工程光学2-2
第四节 里想光学系统的放大率
一、垂轴放大率
第二章 理想光学系统
y′ f x′ l ′f β = =− =− =− y x f′ lf ′
1.微小位移时的 α
f =− f ′
l′ = l
二、轴向放大率
xx ' = ff '
⇒ xdx ' + x ' dx = 0
dx ' dl ' α = = dx dl
若物空间与像空间的介质折射率相等 n=n'
f =−f′
β =
l' l
四 理想光学系统两焦距之间的关系
第二章
理想光学系统
∵ (−l )tg (−u ) = ltgu = l ′tgu ′ = h ∵ −( x + f )tg (−u ) = ( x + f )tgu = ( x′ + f ′)tgu ′…… (1) ′ y′ f x′ fy f y′ ∵ β = = − = − ⇒ x = − ; ; x′ = − 带入(1 )式得: y x f′ y′ y ′ ′ fytgu = − f y′tgu ′ ∵ tgu ≈ u ⇒ fyu = − f y′u ′ ∵ nyu = n′y′u ′ f′ n′ ∴ = − ; 当n = n ′ ⇒ f ′ = − f f n
解:这是个两次成像的问题,设对L1的物距、像距分别为l1和l1′ ′ 对L 2为l2 和l2 , 注意l2 = (l1′ − d ), 则由高斯公式: 1 1 1 1 1 1 − = ⇒ − = l1′ l1 f1′ l1′ −10 5 1 1 1 1 1 1 1 1 1 − = ⇒ − = ⇒ − = ′ ′ ′ l 2 l2 f 2′ l2 (l1′ − d ) f 2′ l2 (l1′ − 5) −10 ′ ⇒ l1′ = 10.00cm; l2 = −5.00cm; l2 = 10.00cm ′ l1′ l2 10 10 β1 = − = − = −1.00; β 2 = − = − = 2.00 l1 10 −5.0 l2
工程光学第二章练习参考答案

(5)
n sinU NA sinU 0.1
U 5.73917 D 2( ltgU ) 2(45 tg 5.73917 ) 9.045mm
(5)
lz 160 D D' 1.667 9.00mm lz ' 29.63
(6)
-l (6)
l’ 180 -lz
h3 h2 d 2 tgu2 ' 12 10 0.04 11.6 tgu3 ' tgu3 h3 11.6 0.04 0.156 f3' 100
第二章 17
F’ 求物方参数。反向算。 h1=10
H’
u3’
f’
h1 10 f ' 64.102564 tgu3 ' 0.156 h3 11.6 lF ' 74.35897 tgu3 ' 0.156
第二章 17
求物方参数。反向算。
h1=10
H’
u3’
F’
f1 ' 50, f 2 ' 50, f 3 ' 100 d1 d 2 10
f’
lF’
tgu1 ' tgu2
h1
f1 '
10
50
0.2
h2 h1 d1tgu1 ' 10 10 ( 0.2) 12 tgu2 ' tgu3 tgu2 h2 f2' 0.2 12 50 0.04
第二章 3
y H -f d 1140mm 7200mm H’ f’ y’
l ' l 10
l d l ' 7200 2 f ' d 1140 1 1 1 l' l f'
课件工程光学-08典型光学系统.ppt

1.0
0.8
光谱光效率
为什么暗环境下能
0.6
做饭、洗衣,但不
0.4
能描龙绣凤?
0.2
2024/10/8
0.0 400 500 600 700 800
l(nm)
光谱光效率函数曲线
第七章 光度学基础
7
§8.1.5 眼睛的分辨率
眼睛刚能分辨开二个很靠近点的能力称为眼睛的分辨率。 二者成反 比
刚能分辨的二个点对眼睛物方节点的张角称为极限分辨角。
瞄准精度和前面讲到的分辨率是不是一个概念?
瞄准精度随所选取的瞄准标志而异,最高精度可达人眼分辨率的1/6到1/10。
二实线重合 60
2024/10/8
二直线端部对准 叉线对准单线
(10~20)
10
第七章 光度学基础
双线对称夹单线 (5~10)
9
§8.1.7 眼睛的立体视觉
眼睛观察空间物体时,能区别它们的相对远近而具有立体视觉。简称体视。 C
若以50%渐晕点为界来决定线视场2 y
F
2 y 2B2F
f tanW2
f h d
250 f
2 y 500h d
W F
f 眼瞳
W3W2 W1 2a 2h
眼瞳
d
2024/10/8
第七章 光度学基础
14
讨论:
逢年过节,要买放大镜孝敬老人, 该如何选择其放大倍率?
2y h
2y 1
2y 1 d
(2)与照明光谱成份有关:单色光分辨率高(眼睛有色差); (3)与视网膜上成像位置有关,黄斑处分辨率最高。
对眼睛张角小物体的要借助望远镜或显微镜等仪器,仪器 应有适当的放大率,使能被仪器分辨的也能被眼睛分辨。
工程光学习题参考答案第二章理想光学系统
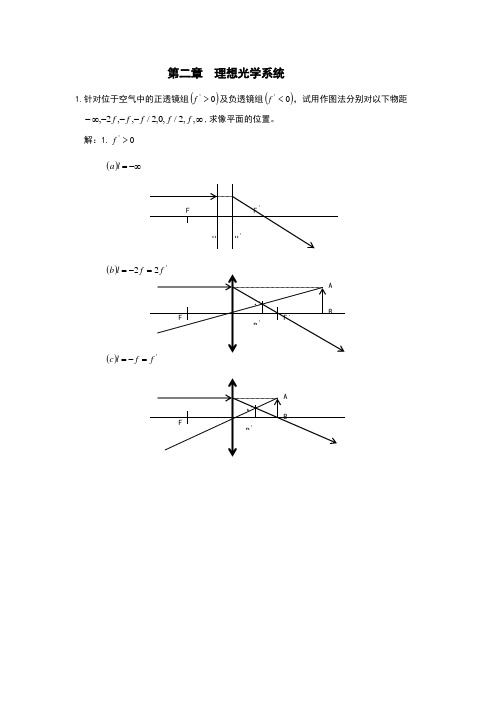
第二章 理想光学系统1.针对位于空气中的正透镜组()0'>f 及负透镜组()0'<f ,试用作图法分别对以下物距 ∞---∞-,,2/,0,2/,,2,f f f f f ,求像平面的位置。
解:1.0'>f ()-∞=l a()'2f l b -=()f f l c =-=()/f l d -=()0=l e()/f l f =')(f f l g -=='22)(f f l h -==+∞=l i )(2.0'<f -∞=l a )(l b )(=l c =)(/)(f l d -=0 el(=)f=l2/ (f)()fg=l(=h)ll i)(+∞=2. 已知照相物镜的焦距f’=75mm,被摄景物位于(以F 点为坐标原点)=x ,2,4,6,8,10,m m m m m -----∝-处,试求照相底片应分别放在离物镜的像方焦面多远的地方。
解: (1)x= -∝ ,xx ′=ff ′ 得到:x ′=0 (2)x ′= (3)x ′= (4)x ′= (5)x ′=(6)x ′=3.设一系统位于空气中,垂轴放大率*-=10β,由物面到像面的距离(共轭距离)为7200mm , 物镜两焦点间距离为1140mm 。
求该物镜焦距,并绘出基点位置图。
解:∵ 系统位于空气中,f f -='10''-===ll y y β 由已知条件:1140)('=+-+x f f7200)('=+-+x l l解得:mm f 600'= mm x 60-=4.已知一个透镜把物体放大*-3投影到屏幕上,当透镜向物体移近18mm 时,物体将被放大*-4,试求透镜的焦距,并用图解法校核之。
解:方法一:31'11-==l l β ⇒ ()183321'1--=-=l l l ①42'22-==l l β ⇒ 2'24l l -= ② 1821+-=-l l ⇒ 1821-=l l ③ '/1/1/11'1f l l =-'/1/1/12'2f l l =-将①②③代入④中得 mm l 2702-= mm l 1080'2-= ∴ mm f 216'=方法二: 311-=-=x fβ 422-=-=x fβ ⇒ mm f 216-= 1812=-x x方法三: 12)4)(3(21''=--==∆∆=ββαnn x x2161812'-=⨯=∆x''fx -=β143''''2'121=+-=∆=+-=-∴fx fx x ββ mm x f 216''=∆=∴5.一个薄透镜对某一物体成实像,放大率为⨯-1,今以另一个薄透镜紧贴在第一个透镜上,则见像向透镜方向移动,放大率为原先的3/4倍,求两块透镜的焦距为多少 解:⇒ 2'21'1/1/1/1/1l l l l -=- ④6.有一正薄透镜对某一物成倒立的实像,像高为物高的一半,今将物面向物体移近100mm , 则所得像与物同大小,求该正透镜组的焦距。
工程光学(知识讲座)
工程光学第二章理想光学系统1、一个折射率为1.52的双凸薄透镜,其中一个折射面的曲率半径是另一个折射面的2倍,且其焦距为5cm,则这两个折射面的曲率半径分别是〔7.8〕cm和〔-3.9〕cm。
2、一个薄透镜折射率为1.5,光焦度500D。
将它浸入某液体,光焦度变成-1.00D,则此液体的折射率为〔1.502〕。
3、反远距型光组由〔一个负透镜和一个正透镜〕组成,其特点是〔工作距大于组合焦距〕。
4、远摄型光组由一个〔正透镜〕和一个〔负透镜〕组成,其主要特点是〔焦距大于筒长〕,因此该组合系统常用在〔长焦距镜头〕的设计中。
第三章平面与平面系统1、反射棱镜在光学系统中的主要作用有〔折叠光路〕、〔转折光路〕和转像、倒像等,在光路中可等效为平行平板加〔平面反射镜〕。
2、某种波长的光入射到顶角为60°的折射棱镜,测得最小偏向角为42°15′,则该种玻璃对于入射波长的折射率为〔1.557〕。
3、唯一能完善成像的光学元器件是〔平面反射镜〕,利用其旋转特性可制作光学杠杆进行放大测量;利用双光楔也可以实现〔微小角度和微小位移〕的测量,主要有〔双光楔旋转测微〕和〔双光楔移动测微〕两种形式。
4、用于制作光学元件的光学材料包括光学玻璃,〔光学晶体〕和〔光学塑料〕三类。
选用光学玻璃时的两个重要参数是〔折射率〕和〔阿贝常数〕。
5、一个右手坐标的虚物,经一个直角屋脊棱镜反射后,成〔右手〕坐标的〔虚〕像。
第四章光学系统中的光束限制1、限制轴上物点成像光束宽度的光阑是〔孔径光阑〕,而〔渐晕光阑〕在其基础上进一步限制轴外物点的成像光束宽度。
2、为减少测量误差,测量仪器一般采用〔物方远心〕光路。
3、测量显微镜的孔径光阑放置在〔物镜后焦平面上〕,视场光阑放置在〔一次实像面处〕,如果用1/2″的CCD接收图像并用14″的监视器观察图像,要求系统放大倍率为140倍,则显微镜的放大倍率是〔5倍〕。
第五章光线的光路计算及像差理论1、实际像与〔理想像〕之间的差异称为像差,包括单色像差和色差两大类。
工程光学2
例1 远摄型光组 一光组由两个薄光组组合而成,第一个薄光组的焦距f1′ = 500mm,第二个薄光组的 焦距f2′ = −400mm,两光组的间隔d=300mm。求组合光组的焦距f′,组合光组的像方主 面位置H ′及像方焦点位置l′ ,并比较筒长(d+l′)与f′的大小。 F F 解 利用正切计算法,设h1 = 100mm,有tgU1′ = h h2 = tgU1′ + 2 = 0.1 f 2′ f2 h1 = 0.2,h2 = h1 − d1tgU1′ = 40mm, f1′
9
第二种情况:M为理想光学系统,已知一对共轭面 为O1, O1′;已知的另外两对光轴上的共轭点分别 是O2, O2′和O3, O3′。确定物空间O点的像点位置 O′。 过O做两条光线O O2和O O3,分别交物平面O1的A 点和B点。
10
第二节 理想光学系统的基点与基面
一. 无限远的轴上物点和它对应的像点F′
7
(3)一个共轴理想光学系统,如果已知两对共 轭面的位置和放大率,或者一对共轭面的位 置和放大率,以及轴上的两对共轭点的位置, 则其它一切物点的像点都可以根据这些已知 的条件得到。
8
第一种情况:M为理想光学系统,像平面O1′ 与物平 面O1共轭,其对应放大率β1已知;像平面O2′ 与物 平面O2共轭,其对应放大率β2也已知。求物空间中 的任一点O的像点位置。 过O 点作两条光线分别过O1 和O2点。 O O1穿过第 二个物平面上的A点, β2已知,A ′ 点确定。 O1′ 与O1共轭, O O1共轭光线必穿过O1′ A ′。同理确定 O O ′ 与O O2共轭的除射光线。
45
望远系统的角放大率为γ =
1
β
=−
f1 (2 − 44) f2
哈工大《工程光学》课件

Engineering Optics
授课:任秀云
n
E n’
A
-U
h
C U’
A’
O r
-L
L’
折射光线EA’ 由以下参量确定:
※像方截距:顶点O到折射光线与光轴交点,用L’表示。
※像方倾斜角:折射光线EA’ 与光轴的夹角,也叫像方 孔径角,用U’ 表示。
(5)r = -40mm, L = -100mm, U = -10°, L’= -200mm
Engineering Optics
授课:任秀云
2.1.3 单折射球面成像的光路计算
一、实际光路的计算公式(追迹公式或大L公式):
nE
n’
A
-U
C O
r
-L
当结构参数 r , n , n’ 给定时,只要知道 L 和 U ,就可求L’ 和 U’
光轴 为起始边。
B
y -U
A
-L
E I
h
I’
φ
C
U’
A’
O
r
-y’ B’
L’
Engineering Optics
授课:任秀云
×
×
√
×
L = 100mm, U = 30°
Engineering Optics
授课:任秀云
同学们一定要记住上面 的符号规则!
Engineering Optics
授课:任秀云
Engineering Optics
n
授课:任秀云
I
E
n’
-U A
-L
φC
O
r
工程光学2008第二章平面光学系统
U1′ A
U1 A′ 2 L′
L1 L′1
L2
D I1′I2 GU′ 2
O1
n2=n′1=n
d L′2
I′ 2 E F n′ 2= 1
O2
图
表明,平行平板不会使物体放大或缩小,对光束既不发散也不
会聚,表明它是一个无焦元件,在光学系统中对光焦度无贡献。
同时还表明,物体经平板成正立像,物像始终位于平板的同侧,
2019/7/14
29
二、常见反射棱镜分类(二)
(1) 一次反
射棱镜 —— 成镜 像
(2) 二次反射棱镜 ---- 相当于双平面镜系
统。
等腰直角棱镜, 相当于一个平面 镜。 一次反射成 镜像,光轴转 90 度
光轴转90度 光轴转180度 光轴转60度 光轴平移 光轴转45度
2019/7/14
30
2019/7/14
Q
虚物成实像
5
(一)单平面镜的成像特性
成完善像。即:若入射光束为单心光束,出射光束也为单心
光束,一物点成唯一像点;
实物成虚像,虚物成实像。虚实相反。
物和像大小相等,正立,对称,反像。
凡一次镜面反射或奇次 镜面反射像被 称为镜像; 偶次反射成一致像。
镜像
2019/7/14
6
(二)平面镜的旋转效应
1.单平面镜的旋转效应
∠A’OA”=2∠POP’
2019/7/14
7
2.双平面镜 的旋转效应
对于夹角为α的双平面镜系统 : α =0 时,像有无数个,分 布如右; α = π时,单平面镜 ,像有一个 ;α为任意角时 成像若干个。
2019/7/14
8
P
工程光学第二章知识点

第二章共轴球面光学系统第一节符号规则●常见的光学系统有多个光学零件组成,每个光学零件往往由多个球面组成●这些球面的球心在一条直线上即为“共轴球面系统”●这条直线称为“光轴”●折射球面的结构参数:曲率半径r、物方折射率n、像方折射率n'●入射光线的参数:物方截距L、物方孔径角U●像方量在相应的物方量字母旁加“ ’ ”区分●光线的传播方向为自左向右●规定符号规则如下:●1)沿轴线段(如L、L’和r)●以顶点为原点,与光线方向相同为正,相反为负●2)垂轴线段(如h、y和y’)●以光轴为基准,光轴以上为正,以下为负●3)光线与光轴的夹角(如U、U’)●光轴转向光线;角量均以锐角计、顺时针为正、逆时针为负●4)光线与法线的夹角(如I、I’、I”)●光线转向法线●5)光轴与法线的夹角(如φ)●光轴转向法线●6)折射面间隔d●前一面顶点到后一面顶点,与光线方向相同为正,相反为负;在折射系统中,d恒为正●物方截距、像方截距、物方孔径角、像方孔径角等物理量是可以有正负的,但作为几何量AO、OA’、∠EAO、∠EA’O等应为正值;在负值物理量前加负号,以保证相应几何量为正●根据物像的位置判断物像的虚实●负(正)物距对应实(虚)物●正(负)像距对应实(虚)像第二节物体经过单个折射球面的成像1,单球面成像的光路计算已知折射球面的结构参数曲率半径r ,物方折射率n ,像方折射率n ’已知入射光线AE 的参数物方截距L ,物方孔径角U (轴上物点)求出射光线参数像方截距L ’,像方孔径角U ’(轴上像点)光路计算2在ΔAEC 中用正弦定律,有 sin sin()I U r L r -=-导出求入射角I 的公式sin sin L r I U r -=(2-1)由折射定律可以求得折射角I ’sin sin n I I n '=='(2-2)由角度关系,可以求得像方孔径角U ’U U I I ''=+-(2-3) 在ΔA ’EC 中应用正弦定律,得像方截距L ’ sin sin I L r r U ''=+' (2-4)式(2-1)至(2-4)就是子午面内实际光线的光路计算公式,利用这组公式可以由已知的L 和U 求L ’和U ’ sin sin L r I U r -= sin sin n I I n '=='U U I I ''=+-sin sin I L r r U ''=+'当物点A 位于轴上无限远处时,相应的L=∞,U=0,则式(2-1)须改变为sin hI r =(2-5)●若L 是定值,L ’是U 的函数,即从同一点发出的光线,孔径角不同,将在像方交在不同的点上 ● 同心光束经过单球面后不再是同心光束●这种误差被称为“球差” ●球差是各种像差中最常见的一种●如果把孔径角U 限制在很小的范围内,光线距光轴很近,称为“近轴光”,U 、U ’、I 和I ’都很小,式(2-1)~(2-4)中的正弦值用弧度来表示 ● 用小写字母u 、u ’、i 、i ’、l 和l ’表示近轴量● l r i u r n ii n u u i i i l r r u -='='''=+-''=+'(2-6)~(2-9) ● 当入射光线平行于光轴时,也以h 作为入射光线的参数,有●h i r =(2-10) ●近轴光线l ’与u 无关,即当物点位置确定后,其像点位置与孔径角u 无关,物点发出的同心光束经折射后在近轴区仍为同心光束 ●在近轴区成的是完善像,这个完善像通常称为“高斯像” ● 近轴区最常用的物像位置公式●n n n n l l r ''--='(2-14) ●已知物点位置l 求像点位置l ’时(或反过来)十分方便 ●1、轴上物点:轴上同一物点发出的近轴光线,经过球面折射以后聚交一点,即轴上物点近轴成像时是符合理想成像条件的。
工程光学讲稿(平面)(完整)课件

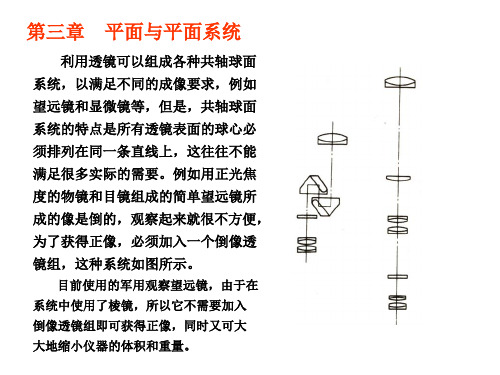
折射望远镜使用透镜作为主反射镜,能够观测可见光波段的天体。反射望远镜使用凹面反射镜作为主反射镜,能够观测红外线和射电波段的天体。射电望远镜则专门用于观测射电波段的天体。
01
02
03
04
总结词
摄影镜头是一种光学仪器,用于拍摄照片或录制视频。
总结词
摄影镜头的种类繁多,根据用途和功能可分为多种类型,如定焦镜头、变焦镜头、鱼眼镜头等。
光的衍射
平面镜与透镜
平面镜是反射面为平面的镜子,具有反射光线的能力,且入射角等于反射角。
用于日常生活、光学仪器和科学实验中,如化妆镜、眼镜、显微镜、望远镜等。
平面镜的用途
平面镜的性质
中间厚边缘薄的透镜,具有汇聚光线的能力,可以用于制作放大镜、显微镜、望远镜等。
凸透镜Βιβλιοθήκη 凹透镜透镜的焦距中间薄边缘厚的透镜,具有发散光线的能力,可以用于制作近视眼镜、散光眼镜等。
光学仪器在科研领域的应用也十分广泛,主要用于物理、化学、生物等学科的研究。例如,利用光谱仪研究物质的结构和性质,使用干涉仪测量微小距离和角度,以及通过光学仪器观测天体和微观粒子等。
科研中常用的光学仪器还包括分光仪、干涉仪、光谱分析仪等,这些仪器在推动学科发展和科技进步方面发挥着重要作用。
光的干涉与衍射实验
通过双缝干涉实验,观察光波的干涉现象,了解干涉的条件和特点。
双缝干涉实验是研究光波干涉现象的基础实验之一。在实验中,通过调整光源、双缝和屏幕的距离,观察到明暗相间的干涉条纹。通过测量干涉条纹的间距和双缝的间距,可以计算出光波的波长。
通过圆孔衍射实验,观察光波的衍射现象,了解衍射的条件和特点。
工程光学应用
光学仪器在工业中应用广泛,主要用于检测、测量和控制等方面。例如,利用光学显微镜对产品表面进行微观检测,使用激光测量仪对生产线上的产品进行高精度测量,以及通过光束控制系统实现自动化生产。
工程光学(平面与平面系统)
特点:像与物上、下同向,但左右却颠倒,它可通过奇次反射得到。 ② 一致像:物为右手坐标,像也为右手坐标,即物与像是完全一致的,它
可通过偶次反射来得到。
总结:(1)奇数次反射成镜像,偶数次反射成与物一致的像。 (2)当物体旋转时,其像反方向旋转相同的度数。
二、平面镜旋转
重要特性:当入射光方向不变,而平面镜旋转时,反射光线的方向将会改变。 若平面镜转过角α,反射光线将转过2α=θ角。 θ=AOA’’ - AOA’ =2(AON - AON1) ∵ AON - AON1 = α
解:若把折射平面看成是曲率半径为r=∞的折射面,那么,近轴区平面 折射的物象公式可写成
n' l' n' l'
n l n l
n ' n r
0
空气 Ⅱ面 d Ⅰ面 -l1 A2’ A A1’ 乙醇
n2’
n2=n1’ -l’2 n1 -l’1 -l2
设水底有物点A,经水、乙醇交界面(平面Ⅰ) 折射后成像为A’,
x’ o’ y’ z’
镜系统的转像情况。
例2:若将直角棱镜换成屋脊棱镜,则情况由是如何? 例3:如果在系统加上一组透镜系统情况由将如何?
y y x o
z
x
o
z
y’ x’ o’ z’ x’ o’ y’ z’ y’’
x’’
o’’ z’’ y’’’ x’’’ z’’’ o’’’
三、反射棱镜的等效作用与展开
显微镜应向上抬起2.5mm,才可使像清晰。
-l Δl‘ -l
3、应用:将平行玻璃平板简化为一个等效空气平板。
d d l' d / n
举例:1. 一人站在游泳池旁,垂直注视池底物体,试问物体的视见位置要 比实际位置高多少?(水的折射率为4/3) 解:设游泳池水的实际深度为d,有池底物点A发出的光线,经过水平面折 射后,像点A’相对物点A产生了轴向位移。
工程光学第二章讲解

(2)物空间中每一条直线对应于像空间中唯一相应
直线,这两条直线称为共轭线。
2019/6/8
8
B
D •A PC
O1
Ok P’
C’
D’ •A’ B’
(3)物空间中每一个平面对应于像空间中唯一平面,
这两个面称为共轭面。
(4)如果物空间任意一点D位于直线BC上,那么 其在像空间的像D’也必位于BC的共轭线B’C’上。
由于这两组光线是共轭的,所以Q与Q’点必是共轭点,QH 与Q’H’也是一对共轭面。
2019/6/8
27
光学系统
A
E1 Q Q' E k
B
P1 h h P k
H
H'
F
O1
OK
F'
-f
f’
QH与Q’H’在光轴同侧,且高度都为h,故其横向放大率为: β=+1
结论:主平面的横向放大率为+1。
※ 在追迹光线时,出射光线在像方主平面上的投射高 度一定与入射光线在物方主平面上的投射高度相等。
f' f r 2
2019/6/8
33
实际光学系统的基点位置和焦距的计算
2019/6/8
34
小结:
一对共轭面,两对共轭点是最常用的共轴系统的基点
物方焦距
F
物方主点
H -f
像方主点
H’ f’
像方焦距
F’
物方主平面 像方主平面
一对共轭面: 两个主平面。
问:物方焦平面与像方焦平面是不是共轭面?
两对共轭点: 无限远轴上物点与F ’,F与无限远轴上像点。 它们构成了一个光学系统的基本模型。
47
方法2:过F 作辅助线,过光组后与光轴平行, 交像方焦平面于N ’,则A点射出的与 辅助光线平行的光线过光组后过 N ’点, 与光轴交点即是A’。
工程光学第二章

近轴区的特点
l u lu h
和 (1)-(4)式说明:
对于一个确定位置的物体,无论 u 为何值,l’ 均为定值,即近轴光路
能获得唯一像。即: l’ 与 u 无关,与 l 有关。 证明做为作业
近轴区内以细光束成像都是完善的,该像称为高斯像,通过高斯像点且垂
直于光轴的平面称为高斯像面,A 与 A’ 点称为共轭点。
练习:推倒垂轴放大率公式,寻找 p17推倒中的错误
近轴区成像的放大率和传递不变量 轴向放大率
dl nl 2 n 2 2 dl nl n
两放大率关系
α 恒为正,物点沿轴向移动时,其像点沿同方向
移动。
近轴区成像的放大率和传递不变量 角放大率
u l n n' l n 1 u l n' nl n'
物方焦距
例题
已知一折射球面其r =36.48mm,n =1, n’ =1.5163。轴上点A的截距 L=-240mm,由它 发出一同心光束,今取U为-1°、-2 °、 -3 °的三条光线,分别求它们经折射球面后的 光路。(即求像方截距L’ 和像方倾斜角U’ E n n’ )
A O -240mm C
U U I I
l r i u r n l r i i u n r
第四式 轴上点 无限远
h r n l r i i u n r i
u u i i
i l r (1 ) u
u u i i
l r (1 i ) u
第二章:共轴球面光学系统
2.1 基本概念与符号规则 2.2 单个折射球面成像
2.3 单个反射球面成像 2.4 共轴球面光学系统成像
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双平面镜具有以下成像性质:
二次反射像与原物坐标系相同,成一致像
。 位于主截面(两平面镜的公共垂直面)内 的光线,不论入射光线方向如何,出射光 线的转角永远等于两平面镜夹角的两倍。
2018/12/23
11
三、平面镜的应用
1. 成像作用
M A' A M -f b) P
光线移动的距离随入射 角的不同而不同 同样也随平板的厚度不 同而变化
2018/12/23
21
如果是在近轴区,上式可以写为
1 z d i1 i1' d 1 i1 n
如果d、n是常数,因此 z 和 i 成正比。
1
平行平面板的这一性质使它在测微机构的读数 系统中得到应用。
22
2018/12/23
四、平行平板的应用
1.如分划板、显微镜载物台上的载波片和盖玻片、 滤光片和滤色片、补偿平板及保护玻璃片等。
2018/12/23
23
四、平行平板的应用
2.平行平面板在测微机构的读数系统中得到应用 ---平板测微器
1 z d i1 i1 ' d 1 n
AF dtgI1'
tgI1' L' d 1 tgI 1
2018/12/23 17
tgI1' L' d 1 tgI 1
公式表明:ΔL′因不同的I1值不同而 不同。 即从具有不同入射角的各条光线经平 行平面板折射后,具有不同的轴向 位移量。
2018/12/23
7
2.双平面镜 的旋转效应
对于夹角为α的双平面镜系统 : α =0 时,像有无数个,分 布如右; α = π时,单平面镜 ,像有一个 ;α为任意角时 成像若干个。
2018/12/23
8
P
A
P
双平面镜的2θ 原则
I1 I1
O1
O2
I2 I2
q
N
β = 2θ
q
M
b
2018/12/23
sin I 1 n sin I 1'
n sin I 2 sin I 2 '
平板的两面是平行的
I 1' I 2
sin I 2 ' sin I1
I 2 ' I1 U ' U 2 1
2018/12/23 15
结论
1.平行平面板的出射光线BS′ 和入射光线 SA是平行,即不改变光线方向。
L1
P
2.光放大作用---光学杠杆
H H'
F' a
测杆
由于转角 α很小,此装置的位移量放大倍数为:
M AA f tg 2 2 f x atg a
AA atg 2
2f x Mx a
2018/12/23
12
3. 转折光轴:使光轴转到某一特定角以及缩小仪
物像关系 一致像:物为左(右)手系,像为左(右)手系。 其中,物像坐标方向完成相同的称为完全一致像。除光轴外, 其它两个坐标反向的称为倒的一致像。
2018/12/23
3
二
A
平面镜的成像性质
B
P
O
Q
实物成虚像
A’
2018/12/23 4
A’
P
Q
虚物成实像
A
2018/12/23 5
(一)单平面镜的成像特性
结论:同心光束经平行平面板后变 为非同心光束,成像是不完善的。 平行平面板的厚度d 愈大,成像不完 善程度也愈大。
18
2018/12/23
如入射光束孔径很小,即为近轴光束成像, 则因I1角很小,
1 l' d 1 n
因此,物点以近轴光经平行平面板成像是完
善的。
2018/12/23
器的体积。
出射光线不稳定
五角棱镜两反射面的夹角一定 则出射光线稳定
2018/12/23
13
§2-2 平行平板的成像
由两个相互平行的折射平面构成的光学
元件称为平行平面板。
常见的如:标尺、刻有标志的分划板、
补偿板、滤光镜、保护玻璃等等
2018/12/23
14
一、平行平面板的成像特性 应用折射定律
19
三、侧向位移Z大小:
平行平面板的厚度为d,由 ΔABD和ABC得
Z AB sinI 1 I 1'
d AB cos I 1'
2018/12/23
20
d sin I1 I1 ' Z cos I1 ' cos I1 sin I1 d 1 2 2 n sin I1
成完善像。即:若入射光束为单心光束,出射光束也为单心 光束,一物点成唯一像点;
实物成虚像,虚物成实像。虚实相反。
物和像大小相等,正立,对称,反像。
凡一次镜面反射或奇次 镜面反射像被 称为镜像; 偶次反射成一致像。
镜像
2018/12/23
6
(二)平面镜的旋转效应
1.单平面镜的旋转效应
∠A’OA”=2。假设两者间的夹角为θ,入射 光线AO1经两个平面镜反射后,沿着O2B的方向射出 ,延长AO1和O2B相交于一点M,设入射和出射光线 间的夹角为β,由△O1O2M根据外角等于不相邻的两 个内角之和的关系 两平面镜的法线相交于一点N,由△O1O2N得 将以上关系代入上面β的公式,得到 以上关系和I角的大小无关。
通过分划板的刻线与A´A''重合,可测小角α 。
2018/12/23 24
§2-4 反射棱镜
2018/12/23
25
一、基本概念
定义:把多个反射面集成在同 一块光学材料上的光学元件。
2.平行平板不会使物体放大或缩小,对光束 既不发散也不会聚,表明它是一个无焦元件, 在光学系统中对光焦度无贡献。
3.物体经平板成正立像,物像始终位于平板的同侧,且虚实相反。
2018/12/23
16
二、光线在光轴方向上有一轴向 位移ΔL′大小:
设入射光线为同心光束并会聚于E 点(为虚物点)
L' BF FK d AFctgI1
第二章 平面光学系统
2018/12/23 1
§2-1 平面镜的成像性质
一、物像的坐标关系
P
y z
O
y' z'
O’
x
x'
食 指 大 代 拇 表 中 指 轴 指 代 代 表 表 轴 Y
Z
X 轴
Q
2018/12/23
2
物像坐标系:坐标关系符合左手的称为左手系 ; 坐标关系符合右手的称为右手系。
物像关系分类: 镜像:物为左(右)手系,像为右(左)手系. 其中:上下方向不变的称为正镜像。上下变化的为倒 镜像。