车辆_轨道耦合系统随机振动分析
轮轨系统激励下列车-轨道耦合系统的振动分析
轮轨系统激励下列车. 轨道耦合系统的振动分析
刘永存 孙立 郜 永 杰
武汉 406) 30 3 ( 中铁第 四勘察设计院集团有限公司线站处
【 摘
要】 / )弹性 系统动力学总势能不变值原理和形成矩阵的 “ g- f ] 对号入座’ ’ 法则, 建立了列车一 轨道耦合
砟轨 道在实 际使用过程 中 由于振动 的影 响 , 其几何
形位会 不断地 发生变化 , 形成各种 各样 的不平顺状
辆 所有 的位 移 均从 各 自的静 力平 衡位 置 开始测 量 ( 车辆未进 入轨道 系统 ) 车辆 在 t , 时刻 的运行速 度 和 加速度 分别为 vt at (和 ( 。 ) )
列车- 轨道耦 合系 统竖 向振 动 响应 进行 了 的研 究 。
梁 。钢 轨和 轨道 板之 间通 过模 拟 为离 散弹 簧和 阻
1 列车一 轨道耦 合系统模 型
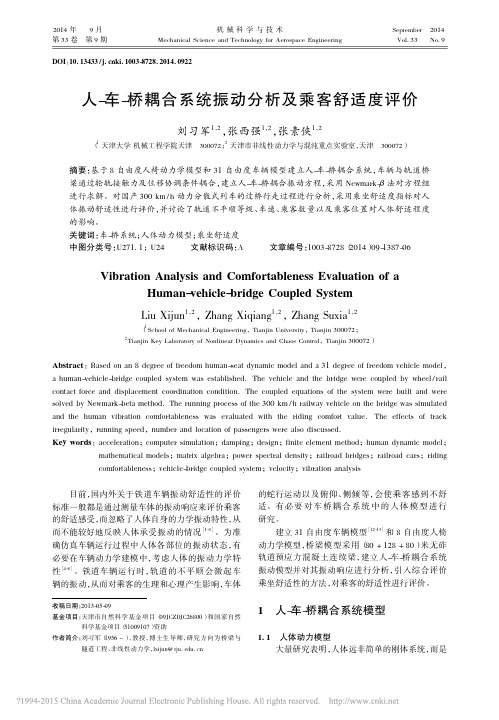
图 l 绘 了列车一 式轨道 耦合系 统模 型 。 描 板 在
尼器连 接 , 轨道 板和底座 之 间以及底座 与路基之 间
通过 模拟 为连 续 弹簧 和 阻尼器 连接 。钢 轨梁 单 元 长度取 钢轨离散 支点 的间距 , , 用 表示 , 钢轨梁 单 设
45 s 扣件 间距 为 06 5 轨 道板 为 C 0级钢 . No/ m, . m; 2 5 筋 混凝 土预 制板 , 寸 49 m × 24 × 01m; 尺 .3 . m .9 混
凝 土底 座尺 寸 49 m × 30 × 03 m,C 0混凝 . 3 .m . 0 4 土 ; A 砂 浆弹性 模量 3 0 a 厚度 00 m。运 用 C 0 MP , .5 法 求解 系统 振动 方程 ,取 为 1 , 0 . 时间步 长 S 令 车 4 。
人_车_桥耦合系统振动分析及乘客舒适度评价_刘习军
Vibration Analysis and Comfortableness Evaluation of a Humanvehiclebridge Coupled System
2 2 2 Liu Xijun1 , ,Zhang Xiqiang1 , ,Zhang Suxia1 ,
( 1 School of Mechanical Engineering,Tianjin University,Tianjin 300072 ;
1
1. 1
人车桥耦合系统模型
人体动力模型 大量研究表明, 人体远非简单的刚体系统, 而是
1388
机械科学与技术
第 33 卷
一个异常复杂而活跃的生物弹性系统, 并且其振动 姿势和心理的变化而变化, 此外, 每 特性伴随环境、 个人之间的差异也较大。 如图 1 所示为人 体坐 姿 模 型。 选 取 列 车行进方向为 x, 竖直 y 方向依 向上方向为 z, 据右 手 定 则 判 定。 人 体模型包括头部、 脏腑 和躯干 3 部分, 每部分 有 y、 z 两个自由度, 共 有 6 个自由度, 添加一个座椅, 座椅也是 y、 z 两个自 由度, 整个人椅模型共有 8 个自由度。图 1 中: ① 为 头部与躯干的无质量连接元件, 该连接元件可理解 为抗拉压和弯曲, 用以模拟两个方向的刚度和阻尼, y、 z 两个方向刚度和阻尼分别表示 k hy 、 k hz 、 c hy 、 c hz ; ② 处表示为 k py 、 k pz 、 c py 、 c pz ; ③ 处表示为 k by 、 k bz 、 c by 、 c bz ; k sz 、 c sy 、 c sz 。 ④处表示为 k sy 、 如图 2 所示为乘 客在车厢的位置分布, 通过设置分布参数, 可 以得 到 人 体 模 型 在 列 车任 意 位 置 处 的 振 动 1. 2 车辆模型 以国产动力分散式列车模型为基础, 模型包括 一个车体、 2 个转向架和 4 个轮对, 如图 3 所示。 每 个编组单元的车体和转向架考虑 5 个自由度, 分别 为横摆、 沉浮、 侧滚、 点头、 摇头; 每个轮对考虑 4 个 自由度, 分别为横摆、 沉浮、 侧滚、 摇头。整个车辆模 型为 31 自由度。 一般计算 3 节或者 3 节以上的列 车编组, 便可得到较可靠的结果, 列车编组采用 1 机 车 + 2 拖车。
车辆与道路桥梁耦合随机动力分析及优化

车辆与道路桥梁耦合随机动力分析及优化摘要:本文主要研究了车辆与道路/桥梁耦合系统在动力分析以及动力优化过程中的关键问题,提出了一种建立在随机振动灵敏度基础之上的动力优化方法,望以上问题为后续同类作业的开展提供一定的参考与帮助。
关键词:车辆道路/桥梁耦合动力优化现阶段,有关车辆与道路/桥梁耦合系统随机动力分析的研究还比较少,在计算方面存在着比较大的问题与不足。
起来,主要可以归纳为以下两个方面:首先,在有关车辆与道路/桥梁耦合系统振动动力的分析中,为了判定车辆振动受路面随机不平整度的影响,多是通过时间历程分析的方式实现,其所得出的概率特征不够准确,随机动力响应不够精确,并会对后期有关车辆振动的控制产生不良影响;其次,在有关车辆与道路/桥梁耦合系统动力优化的过程当中,由于目标函数及约束函数多以复合、非线性函数作为表现形式,因此在灵敏度分析方面格外的复杂。
现阶段是应用的最小二乘法、或则是摄动法均无法解决计算量过于繁重的问题。
本文即针对上述实际情况,就车辆与道路/桥梁耦合系统在随机动力分析与优化方面的关键问题做详细分析与说明。
1.车辆与道路/桥梁耦合系统运动方程分析从车辆与道路/桥梁耦合系统的研究视角上来看,车辆在行驶过程当中从本质上来说属于一个极为复杂的多自由度振动体系。
为了使后续有关随机动力的分析优化操作更加简便,需要作出如下几点假设:(1)假设行驶车辆车身为钢体,前桥、后桥均为集中质量;(2)假设行驶车辆左向车轮、右向车轮所受到的路面不平整度激励功率谱表现完全一致,仅在受激励的时间方面存在差异;(3)假设行驶车辆始终保存均匀速度以直线运动,车辆轮胎始终与地面保持接触关系;(4)假设车辆在行驶过程当中的垂向针对以及仰俯振动会对路面产生显著影响;(5)剔除车辆在行驶过程当中,其他方向振动对路面的影响。
基于以上分析,在假定车辆轮胎与路面始终保持接触关系的前提条件下,以Zcn代表车辆第n个车轮所发生的位移反应,由此可以在DAlembert原理的基础之上,构建对应车辆行驶过程的基本运动方程,如下所示:2.精细积分法在车辆与道路/桥梁耦合系统随机动力分析中的应用相关研究人员认为:在车辆轮胎行驶于道路/桥梁表面的过程当中,只要车辆能够保证移动动作的晕苏醒,则对于轮胎同道路/桥梁的接触点而言,耦合力的表现与接触点自身对应的位移、速度、加速度表现均存在显著的相关性关系,而各单元当中,任意信息均可以通过节点信息的方式获取。
随机振动理论在轨道结构分析中应用
系式描述其随时间变化关系的信号或振
动
可用复杂的数学函数描述,
其简谐分量之间的频率比
为有理数
周期振动
复杂周期振动
8
非周期振动
◦ 近似周期性,其简谐分量之间的频率比为 无理数
瞬态振动
9
(2)非确定性振动
随机振动:任意时刻瞬时振动状态(振 幅、频率、相位)不能预先确定的、变 化规律不能用确定性函数来描述的振动
13
按激励类型分:随机自由振动、随机受 迫振动
按系统自由度分:单自由度随机振动、 多自由度随机振动、无限自由度随机振 动
按微分方程的特点:线性随机振动、非 线性随机振动
14
◦ 工程常用分类:按振动特性随时间变化分 类:
◦ 平稳随机过程(统计特征参数如均值、方 差、均方值等不随时间变化)
任一单个样本函数的时间平均统计特征等于该随 机过程的集合平均统计特征,称为各态历经(遍 历性)随机信号
形畸变 ◦ 平滑处理来消除信号中的噪声
27
(2)随机信号时域分析
又称波形分析
◦ 首先滤波
◦ 分析波形最大值、平均值、有效值、随机 过程的数学期望(摆动中心);
◦ 波形与波形之间的相关系数、相关函数;
◦ 位移、速度、加速度相互积分和微分转换。
28
(3)随机过程的幅域描述
概率分布函数(一维、二维) 概率分布密度函数 随机信号还包括均值、均方值、方差、
为若干小的时段,每个时段里把信号视为平稳 的.
◦ 在信号作傅立叶变换前乘一个时间有限的窗 函数,通过窗在时间轴上移动使窗内信号假定 为平稳状态进行频谱分析,最后通过不同时刻 局部频谱的差异分析,得到信号时变特性.
38
缺点
◦ Heisenberg不确定性原理 ◦ 时间分辨率和频率分辨率不能同时任意小,
车辆-轨道系统耦合高频振动的研究
车辆-轨道系统耦合高频振动的研究
张永利;魏伟
【期刊名称】《大连交通大学学报》
【年(卷),期】2006(027)002
【摘要】车辆-轨道垂向耦合振动是车辆-轨道耦合动力学主要研究课题.建立了车辆-轨道垂向耦合Timoshenko梁高频振动模型,运用快速积分方法编制仿真程序,对扁疤激励情况下的轮轨垂向高频振动进行系统仿真与分析,并与Euler梁模型仿真结果进行比较.结果表明,车辆速度与车轮扁疤的长度对轮轨系统振动有很大的影响;在高频情况下,进行振动与噪声的研究时,建议使用Timoshenko梁模型.
【总页数】4页(P9-12)
【作者】张永利;魏伟
【作者单位】大连交通大学,交通运输工程学院,大连,116028;大连交通大学,交通运输工程学院,大连,116028
【正文语种】中文
【中图分类】U270.11
【相关文献】
1.城市轨道交通箱梁中高频振动导纳特性试验研究 [J], 宋立忠;李小珍;高慰;张迅
2.考虑车辆位置影响的风-车-桥系统耦合振动研究 [J], 李永乐;强士中;廖海黎
3.车辆悬架中高频振动传递分析与橡胶衬套刚度优化 [J], 陈无畏;李欣冉;陈晓新;王磊
4.城市轨道交通运营系统耦合协调度研究 [J], 薛亮;赵胜川
5.基于交叉学科的车辆工程研究生培养模式探索
——以轨道交通车辆方向研究生培养为例 [J], 文孝霞;杜子学;崔晓璐
因版权原因,仅展示原文概要,查看原文内容请购买。
车辆与道路/桥梁耦合随机动力分析及优化

车辆与道路/桥梁耦合随机动力分析及优化车辆与道路/桥梁耦合系统随机动力清晰化验证与灵活优化工作结果,将直接决定日后我国交通事业长期可持续发展进程,不过目前我国在此类结构单元下的改造优势却不太乐观。
单纯拿车辆振动与路面不平整程度关联验证评估工作来讲,内部技术人员通常会将核心注意力自然地投射到时间历程之上,获取的概率、随机动力结果必然不够精准,最终严重制约车辆行驶安全质量。
面对此类状况,笔者决定联合车辆与道路/桥梁耦合系统内部动力规则加以科学验证解析,同时联合以往弊端调查结果进行关键性优化方案制定,希望在一类以随机振动灵敏程度为核心的动力优化方式辅助范畴下,能够为后续相关施工活动提供更加坚实的安全技术保障。
标签:车辆;道路/桥梁;耦合;随机动力;优化解析0 引言随着中国特色社会主义事业体系架构不断完善,有关交通领域内的车辆道路/桥梁耦合随机动力分析成果开始不断革新。
但是毕竟我国计算机信息处理技术发展起步较晚,施工管理主体在处理多元化数据信息期间力有不逮。
结合以往我国特定区域车辆和道路/桥梁耦合动力评估和优化工作流程加以客观论证,因为当中穿插目标、约束等多种函数,致使后期灵敏度分析流程遭受百般限制,即便是目前较为流行的最小二乘法、摄动法,面对此类困境基本束手无策。
因此,联合上述一切状况,进行车辆和道路/桥梁耦合系统随机动力优化分析关键性问题整理说明,绝对是迎合交通事业安定和谐发展诉求的最佳途径。
1 探究车辆和道路/桥梁耦合运动规则的必要条件整理结合以往实践调查经验整理解析,在特定区域车辆与道路/桥梁耦合体系架构之下,车辆行驶动作便可被视为一类较为复杂的多自由角度振动单元,为了尽量维持内部随机动力优化解析流程的简易程度,技术人员有必要提前作出以下规范准备。
首先,将处于行驶过程中的车辆车身视为常规钢体结构,至于前桥、后桥等自然过渡转化成为集中质量。
其次,认定此类车辆左向、右向轮胎在同一时间内所承受的路面不平整激励功率不存在任何偏差迹象,特殊状况下会在受激励时间方面出现些许偏差迹象。
车桥耦合振动分析软件
第1章系统概述 (1)1.1系统特点 (1)1.2软件功能 (1)1.2.1车辆子系统 (2)1.2.2激励模型 (2)1.2.3桥梁/轨道子系统 (3)1.2.4求解方法 (3)1.2.5后处理 (3)1.3计算流程 (4)第2章软件安装与运行方式 (6)2.1软件安装 (6)2.2运行方式 (6)第3章前处理所需文本文件定义 (8)3.1输入文件概述 (8)3.2桥梁/轨道子结构:Modal_Substructure_Bridge.dat (9)3.2.1第一行控制参数 (9)3.2.2第二行后的节点坐标参数 (10)3.2.3轨道节点编号 (10)3.2.4集中阻尼和非线性弹簧单元定义 (10)3.2.5与仿真计算同步输出桥梁响应的节点个数 (11)3.2.6桥梁/轨道结构模态信息 (11)3.2.7后处理考察节点位移和应力/内力定义 (13)3.3车辆子结构:Modal_Substructure_Vehicletypes.dat (13)3.3.1第一行控制参数 (13)3.3.2第二行控制参数 (14)3.3.3第二行后的节点坐标参数 (14)3.3.4车轮节点编号 (14)3.3.5车轮静载、轮轨/路面耦合类型 (16)3.3.6车轮刚度、阻尼和质量等参数定义 (16)3.3.7集中阻尼和非线性弹簧单元定义 (16)3.3.8与仿真计算同步输出车辆响应的节点个数 (17)3.3.9车辆结构模态信息 (17)3.3.10其他车辆的定义 (17)3.4集中阻尼和非线性弹簧:NonlinearSpringParameters.dat (18)3.4.1第一行控制参数 (18)3.4.2其后依次定义每个单元的相关参数: (18)3.5轨道/车道位置:Rails_Location.dat (19)3.5.1第一行控制参数 (19)3.5.2第二行控制参数 (19)3.5.3每条轨道的关键点定义 (19)3.6车队编组及运行组织:VehicleOrginazition.dat (21)3.6.1第一行控制参数 (21)3.6.2车队编组定义 (22)3.6.3车队运行参数定义 (22)3.7路面不平顺:Irregularity.dat (23)3.7.1第一、三、五行提示参数 (23)3.4.1第二、四、六行控制参数 (23)3.4.2第六行后的不平顺样本 (24)3.8求解参数:SolutionParameters.dat (24)第4章后处理二进制文件存储格式 (26)4.1Modal_Substructure_Bridge_ANSYS (26)4.2Modal_Substructure_Bridge_ANSYS_postprocess.bin (26)4.3Res_DisResults_Bridge.bin (26)4.4Res_AccResults_Bridge.bin (27)4.5Res_Modal_Coordinate_Results_Bridge.bin (27)4.6Res_BridgeResponseBulkDate_disacc.bin (27)4.7Res_BridgeResponseBulkDate_dis_static.bin (28)4.8Res_BridgeResponseBulkDate_stress.bin (28)4.9Res_BridgeResponseBulkDate_stress_static.bin (28)4.10Res_AccResults_Vehicles.bin (29)4.11Res_DisResults_Vehicles.bin (29)4.12Res_ReductionRation_Vehicles.bin (29)4.13Res_DerailmentFactor_Vehicles.bin (30)4.1418.Res_WheelsetirregDisVehilces.bin (30)车桥耦合振动分析软件操作手册第1章系统概述车桥耦合振动分析软件VBC(Vehicle-Bridge Coupling)采用Intel Visual Fortran 2013语言编制而成,为Windows控制台程序,目前为3.1版本,可在32位或64位操作系统上运行。
跨座式单轨曲线梁桥车桥耦合随机振动分析

国内图书分类号:U239.3 密级:公开国际图书分类号:西南交通大学研究生学位论文跨座式单轨曲线梁桥车桥耦合随机振动分析年级二O一五级姓名陈雅兰申请学位级别工学硕士专业桥梁与隧道工程指导老师晋智斌副教授二O一八年五月Classified Index: U239.3U.D.C:Southwest Jiaotong UniversityMaster Degree ThesisAnalysis of vehicle-bridge coupling random vibration on curve bridge ofstraddle monorail transitGrade: 2015Candidate: Chen YalanAcademic Degree Applied for: Master DegreeSpeciality: Bridge & Tunnel EngineeringSupervisor: Associate Prof. Jin ZhibinMay. 2018摘要本文基于车辆——轨道耦合动力学基本原理,研究了跨座式单轨交通系统与曲线轨道梁的耦合振动问题,建立了相应的车桥耦合振动模型。
模型中充分考虑各轮胎的侧偏性能,并且在该模型中,采用虚拟激励法将轨道不平顺引起的随机振动问题转化为简谐荷载作用下的瞬态响应问题。
本文进行了如下几个方面的工作:1、建立了空间的三维跨座式单轨车辆模型和空间曲线轨道梁模型。
根据lagrange 方程建立跨座式单轨交通系统的车辆运动方程,推导车辆的刚度矩阵和阻尼矩阵;采用模态综合法建立空间曲线轨道梁的振动方程;通过直线与曲线之间移动坐标系的坐标变换,解决车辆通过曲线轨道梁时的几何关系。
2、充分研究了走形系统各轮胎的性能,考虑各个轮胎的侧偏力,建立了合理的轮轨作用力模型。
3、根据虚拟激励法的原理,开展了跨座式单轨交通车辆——轨道梁时变系统的垂向随机动力研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华 东 交 通 大 学 学 报 Jou rna l of Ea st Ch ina J iao tong U n iversity
文章编号: 100520523 (2001) 0220006207
V o l. 18 N o. 2 J un. 2001
L 2K s2
0
0
0ห้องสมุดไป่ตู้
0
0
0
2K s1 + K s2
0
0
0
- K s1
- K s1
0
0
[K ]u =
2K s1 + K s2
0
0
0
0
- K s1 - K s1
2K
2 1
K
s2
0
- K s1L - K s1L 1
01
0
2L 21K s2
0
0
- K s1L K s1L
(3)
对
称
K s1
0
0
0
K s1
0
0
K s1
¨
[M ]u {a }u + [C ]u {a }u + [ K ]u {a }u = {Q }u
(1)
式中
[M ]u = d iag {M c J c M T M T J T J T M w 1 M W 2 M W 3 M W 4}
(2)
2K s2
0
- K s2
- K s2
0
0
0
0
0
0
2L 22K s2 - L 2K s2
4 轨道2车辆耦合系统随机响应分析
本文以法国 T GV 动车为例, 仿真计算了列车以 80、160 及 25k m h 通过不同等级线路时耦合系统的动 力响应, 并对其进行频域和时域分析, 试图从不同方面探计随机不平顺对系统的影响Ζ 轨道参数则采用了我 国高速线路轨道的设计参数Ζ 4. 1 耦合系统随机响应频域分析 1) 由图 1B、4B、7B、10B 知, 轮轨垂向作用力和主频除由车体引起的 0. 5~ 5 H z 共有低频段外, 还有因 线路不平顺引起的中频段, 在本文中, 一级线路时速为 80 km h 的列车, 其轮轨作用中频段为 10~ 40 H z, 而 车轮经过轨枕造成的周期冲击, 并因此产生的高频谐波在高等线路中比较明显Ζ 2) 由图 2B、5B、8B、11B 可知, 车体垂向加速度在低速线路上, 其主频段主要集中于 1 H z 车体自振频率 附近, 当列车速度增加时, 由线路不平顺造成的激扰对车体振动影响加大, 本文显示时速为 250 km h 的列 车, 其主频段外移至 5~ 8 H zΖ 显然车体主频率进入人体敏感频段时, 列车运营品质将显著降低Ζ 3) 由图 3B、6B、9B、12B 可知, 下传至轨下部件 10 H z 以下的轮轨低频力, 在钢轨振动加速度功率谱中 并不明显, 由于钢轨自身刚度很大, 从功率谱图不难发现, 数百甚至上千赫兹的振动能量都很大, 在高速线路 中尤为如此, 可见钢轨高频振动可能是高频噪音的重要来源之一Ζ 4. 2 耦合系统随机响应时域分析 1) 由图 1A 、4A、7A、10A 可知, 轮轨垂向作用力对不平顺和列车速度都很敏感Ζ 六级线路时速为 80 km h 的列车其最大轮轨作用低于 100 kN , 当线路降为一级或时速升至 250 km h 时, 其最大轮轨垂向力分 别大于 120 kN 和 150 kN , 可见列车提速及线路不平顺对轨道和车轮的影响是很大的Ζ 2) 由图 2A、5A 、8A、11A 可知, 车体垂向加速度最大值对轨道不平顺和列车速度并不敏感, 在本文所示 各种不同工况中, 车体垂向加速度幅值都在 2 m s2 以内Ζ 可见轨道不平顺和列车提速对簧上质量体的机械 损坏并不大Ζ 3) 由图 3A 、6A、9A、12A 可知, 长波不平顺对钢轨加速度幅值影响不大, 图 3 A 和图 6 A 显示时速为 80 km h, 一级和六级线路钢轨加速度幅值都在 20 m s2 内, 若存在短波不平顺则有可能产生较大加速度 (鉴于 有关研究还在进行中Ζ 当列车速度较大时Ζ 对钢轨加速度等影响较大的小于 1 m 短波不平顺, 本文简单得采 取了美轨道谱公式, 仿真计算得到的钢轨加速度可能与现场有较大出入) Ζ由图可知, 行车速度对钢轨加速度 有明显影响, 列车时速为 250 km h, 六级线路钢轨可产生 40 m s2 的加速度Ζ
8 华 东 交 通 大 学 学 报 2001 年
¨
[M ]l{a }l + [C ]l{a }l + [ K ]l{a }l = {Q }l
(5)
∑ ∑ ∑ ∑ 式中 [M ]l =
[M ]el [C ]l =
[C ]el [ K ]l =
值为 0, 功率谱密度函数为 S x (Ξ) 的平稳高斯过程 Γ( t) , 其抽样函数可以利用三角级模型近似地模拟[6]Ζ
N
∑ Γd ( t) =
ak sin (Ξk t + Υk )
(6)
k= 1
式中, ak 是平均值为 0、标准差为 Ρk 的高斯随机变数, 对于 k = 1, 2…N 来说, 是互相独立的Ζ Υk 是与 ak 独立
¨
[M ]{X } + [C ]{X } + [ K ]{X } = {Q }
(11)
利用N ewm a rk 数值积分法[6], 系统由 t0 时刻到 t= t0+ ∃ t 时刻的运动方程, 由下列各式得: 解 (12) 式得 t
·¨
·
¨
时刻位移tX , 将tX , 0X , 0X 代入 (13) (14) , 得 t 时刻速度tX 、加速度tX Ζ
0 引 言
众所周知, 轨道轨面不平顺是机车车辆与轨道结构产生振动的重要因素之一, 随着列车运行速度和列车 重量的不断提高, 车辆2轨道耦合系统的振动越来越强烈, 机车车辆运行平稳性降低, 轨道结构承受的动荷载 增大Ζ其反复作用的结果必将导致轨道结构部件疲劳破坏更加突出, 可靠性下降, 并加快残余累积变形, 这反 过来又加剧了机车车辆的振动Ζ所有这些都严重影响了机车车辆的运行平稳性, 降低了铁路运营品质和轨道 结构的寿命Ζ 因此, 在我国铁路全面提速的今天, 对机车车辆和轨道结构系统的随机振动特性进行深入的研 究是非常必要的Ζ 国外对该问题已进行了许多研究工作, 并取得了一定的成果, 相对而言, 我国在这方面所做的工作还远 远不够, 至今尚未形成自己具有代表意义的轨道谱Ζ 不过近些年来, 我国的铁路科研人员对此也做了一些研 究[4], 填补了我国在这一领域的空白Ζ 本文根据作者自己开发的程序, 讨论了轨道高低随机不平顺对车辆2轨 道耦合系统的影响Ζ
的, 0~ 2Π范围内的同一随机变数, Υk 本身对于 k = 1, 2…N 来说也是独立的Ζ Ρk 用下列方法给出Ζ 在 Γ(t) 的
功率谱密度函数 S (Ξ) 的正域内, 把上限值 Ξu 和下限值 Ξl 之间 N 等分, 设
∃ Ξ = (Ξu - Ξl) N
(7)
Ξk = Ξl + (k -
1 2
{Q }u = {- M cg 0 - M tg - M tg 0 0 F 1 F 2 F 3 F 4}T
其中 F i 为- M w ig + P w i,M w 1= M w 2= M w 3= M w 4, P w i为车辆第 i 轮与钢轨接触处相互作用力, 以向上为正Ζ
由 H am ilton 原理可得上部结构振动方程
1. 2107 1. 0181 0. 6816 0. 5376 0. 2095 0. 0339
Ξc ( rad m )
0. 8245 0. 8245 0. 8245 0. 8245 0. 8245 0. 8245
3 轨道2车辆耦合系统有限元方程数值解的实现
本文将耦合系统分解为上部车辆系统和下部轨道系统[3 , ][7] 对两系统分别单独求解, 两系统间通过几何
)
∃ Ξ k
=
1, 2, …, N
(8)
时
Ρk2 = 4S x (Ξk ) ∃Ξ k = 1, 2, …, N
(9)
即, 认为 S x (Ξ) 的有效功率在 Ξu, Ξl 的范围内; 以外的值可视为 0 时Ζ 设N 为充分大的整数Ζ
鉴于我国目前尚无轨道谱这一事实, 本文采用通常的做法, 借用美国AA R 标准的 6 级线路轨道谱作为
2L 21C s2
0
0
- K s1L - K s1L
称
C s1
C s1
0
0
0
C s1
0
0
C s1
0
C s1
矩阵中 2L 1 为转向架上两悬挂系中心之间的距离; 2L 2 为车体上两转向架中心之间的距离Ζ
1. 3 下部结构广义梁单元
为了便于计算程序的设计和减小总刚度矩阵的带宽, 本文拓用雷晓东轨道结构广义梁单元理论[1 , ][2] 即
将道碴竖向自由度紧凑到梁单元结点自由度中, 使原来 3 结点自由度梁单元变为 4 结点自由度广义梁单元Ζ
这时, 单元结点位移和结点力记为
{a }el = {u 1 Μ1 Η1 Μ31 u 2 Μ2 Η2 Μ32 }T
{F }el =
{U 1
V1
M1
V
3 1
U2
V2
M2
V
3 2
}T
由 H am ilton 原理可得动力问题限元方程为
1 车辆2轨道有限元动力计算模型
1. 1 基本假设与计算模型 为了在保证精度的前提下简化计算, 在模型中采 用下列假设[1 ][2 ]: 1) 仅考虑轮轨竖向动力效应和纵向动力效应; 2) 轨道和上部结构沿线方向左右对称, 可取其半 结构研究; 3) 上部结构为附有二系弹簧系统的整车模型, 车 体和转向架考虑沉浮振动和点头振动; 4) 轮轨间的接触弹簧系数由赫兹分工得出; 5) 钢轨被视为支承在弹性支座上的E u ler梁, 轨 下垫层和枕下道床的支承弹性及阻分别用等效的弹性 系数 K x 1, K y 1和阻尼系数 C x 1, C y 1表示; 6) 轨枕的质量作为集中质量处理, 施加于各支座