曲线的参数方程
第二讲:曲线的参数方程

1.第二讲:曲线的参数方程参数方程的概念1.参数方程的概念(1)定义:一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x ,y 都是某个变数t的函数:=f (t )=g (t )①,并且对于t 的每一个允许值,由方程组①所确定的点M (x ,y )都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数x ,y 的变数t 叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.(2)参数的意义:参数是联系变数x ,y 的桥梁,可以是有物理意义或几何意义的变数,也可以是没有明显实际意义的变数.2.参数方程与普通方程的区别与联系(1)区别:普通方程F (x ,y )=0,直接给出了曲线上点的坐标x ,y 之间的关系,它含有x ,y=f (t )=g (t )(t 为参数)间接给出了曲线上点的坐标x ,y 之间的关系,它含有三个变量t ,x ,y ,其中x 和y 都是参数t 的函数.(2)联系:普通方程中自变量有一个,而且给定其中任意一个变量的值,可以确定另一个变量的值;参数方程中自变量也只有一个,而且给定参数t 的一个值,就可以求出唯一对应的x ,y 的值.这两种方程之间可以进行互化,通过消去参数可以把参数方程化为普通方程,而通过引入参数,也可把普通方程化为参数方程.2.圆的参数方程1.圆心在坐标原点,半径为r 的圆的参数方程如图圆O 与x 轴正半轴交点M 0(r ,0).(1)设M (x ,y )为圆O 上任一点,以OM 为终边的角设为θ,则以θ为参数的圆O的参数其中参数θ的几何意义是OM 0绕O 点逆时针旋转到OM 的位置时转过的角度.(2)设动点M 在圆上从M 0点开始逆时针旋转作匀速圆周运动,角速度为ω,则OM 0经过时间t 转过的角θ=ωt ,则以t 为参数的圆O 其中参数t 的物理意义是质点做匀速圆周运动的时间.2.圆心为C (a ,b ),半径为r 的圆的参数方程圆心为(a ,b ),半径为r 的圆的参数方程可以看成将圆心在原点,半径为r 的圆通过坐3.参数方程和普通方程的互化曲线的参数方程和普通方程的互化(1)曲线的参数方程和普通方程是在同一平面直角坐标系中表示曲线的方程的两种不同形式,两种方程是等价的可以互相转化.(2)将曲线的参数方程化为普通方程,有利于识别曲线的类型.参数方程通过消去参数就可得到普通方程.(3)普通方程化参数方程,首先确定变数x ,y 中的一个与参数t 的关系,例如x =f (t ),其次将x =f (t )代入普通方程解出y =g (t )(4)在参数方程与普通方程的互化中,必须使x ,y 的取值范围保持一致.二圆锥曲线的参数方程1.椭圆的参数方程椭圆的参数方程(1)中心在原点,焦点在x 轴上的椭圆x 2a 2+y 2b 2=1(a >b >0)φ是参数),规定参数φ的取值范围是[0,2π).(2)中心在原点,焦点在y 轴上的椭圆y 2a 2+x 2b 2=1(a >b >0)φ是参数),规定参数φ的取值范围是[0,2π).(3)中心在(h ,k )的椭圆普通方程为(x -h )2a 2+(y -k )2b 2=1,则其参数方程为φ是参数).2.双曲线的参数方程和抛物线的参数方程1.双曲线的参数方程(1)中心在原点,焦点在x 轴上的双曲线x 2a 2-y 2b 2=1规定参数φ的取值范围为φ∈[0,2π)且φ≠π2,φ≠3π2.(2)中心在原点,焦点在y 轴上的双曲线y 2a 2-x 2b 2=12.抛物线的参数方程(1)抛物线y 2=2px (2)参数t 的几何意义是抛物线上除顶点外的任意一点与原点连线的斜率的倒数.三直线的参数方程1.直线的参数方程经过点M 0(x 0,y 0),倾斜角为α的直线l t 为参数).2.直线的参数方程中参数t 的几何意义(1)参数t 的绝对值表示参数t 所对应的点M 到定点M 0的距离.(2)当M 0M →与e (直线的单位方向向量)同向时,t 取正数.当M 0M →与e 反向时,t 取负数,当M 与M 0重合时,t =0.3.直线参数方程的其他形式对于同一条直线的普通方程,选取的参数不同,会得到不同的参数方程.我们把过点M 0(x 0,y 0),倾斜角为α的直线,选取参数t =M 0M =x 0+t cos α=y 0+t sin α(t 为参数)称为直线参数方程的标准形式,此时的参数t 有明确的几何意义.一般地,过点M 0(x 0,y 0),斜率k =ba (a ,b 为常数)=x 0+at =y 0+bt(t 为参数),称为直线参数方程的一般形式,此时的参数t 不具有标准式中参数的几何意义.四渐开线与摆线(了解)1.渐开线的概念及参数方程(1)渐开线的产生过程及定义把一条没有弹性的细绳绕在一个圆盘上,在绳的外端系上一支铅笔,将绳子拉紧,保持绳子与圆相切,逐渐展开,铅笔画出的曲线叫做圆的渐开线,相应的定圆叫做渐开线的基圆.(2)圆的渐开线的参数方程以基圆圆心O 为原点,直线OA 为x 轴,建立如图所示的平面直角坐标系.设基圆的半径为r ,绳子外端M 的坐标为(x ,y )φ是参数).这就是圆的渐开线的参数方程.2.摆线的概念及参数方程(1)摆线的产生过程及定义平面内,一个动圆沿着一条定直线无滑动地滚动时圆周上一个固定点所经过的轨迹,叫做平摆线,简称摆线,又叫旋轮线.(2)半径为r的圆所产生摆线的参数方程为φ是参数).。
曲线的参数方程(教案)

曲线的参数方程教学目标:1. 了解参数方程的定义和特点;2. 学会将直角坐标系下的曲线转换为参数方程;3. 能够利用参数方程分析和解决实际问题。
教学内容:第一章:参数方程的基本概念1.1 参数方程的定义1.2 参数方程的特点1.3 参数方程与直角坐标方程的关系第二章:曲线的参数方程转换2.1 圆的参数方程2.2 椭圆的参数方程2.3 双曲线的参数方程2.4 抛物线的参数方程第三章:参数方程的应用3.1 直线运动的参数方程3.2 曲线运动的参数方程3.3 几何图形的参数方程第四章:参数方程的解法4.1 参数方程的求解方法4.2 参数方程的图像分析4.3 参数方程的优化问题第五章:参数方程的实际应用5.1 参数方程在工程中的应用5.2 参数方程在物理中的应用5.3 参数方程在其他领域的应用教学方法:1. 采用讲授法,讲解参数方程的基本概念和转换方法;2. 利用数形结合法,分析参数方程的图像特点;3. 结合实例,讲解参数方程在实际中的应用;4. 引导学生进行练习和思考,巩固所学知识。
教学评价:1. 课堂问答:检查学生对参数方程基本概念的理解;2. 课堂练习:考察学生对参数方程转换方法的掌握;3. 课后作业:评估学生对参数方程应用的熟练程度;4. 小组讨论:评价学生在团队合作中解决问题的能力。
教学资源:1. 教材或教学参考书;2. 投影仪或白板;3. 数学软件或图形计算器;4. 实例素材和练习题。
教学步骤:第一章:参数方程的基本概念1.1 引入参数方程的概念,解释参数方程的定义;1.2 分析参数方程的特点,与直角坐标方程进行对比;1.3 引导学生思考参数方程的应用场景。
第二章:曲线的参数方程转换2.1 讲解圆的参数方程,展示圆的图像;2.2 引导学生推导椭圆的参数方程,展示椭圆的图像;2.3 讲解双曲线的参数方程,展示双曲线的图像;2.4 讲解抛物线的参数方程,展示抛物线的图像。
第三章:参数方程的应用3.1 分析直线运动的参数方程,举例说明;3.2 分析曲线运动的参数方程,举例说明;3.3 引导学生思考几何图形的参数方程应用。
曲线的参数方程和与普通方程的互化

例1 如图,已知点P是圆O:x2+y2=4上的一个动点 ,点A(6,0).
当点P在圆上运动时,求线段PA中点M的轨迹方程, 并说明点M的轨迹图形是什么?
解: 取xOP , 则圆的参数方程为:
x 2 cos , (为参数) y 2 sin . 设点M的坐标为(x, y),则点P的坐标
的实质是三角代换.
抛物线的参数方程
y
M(x,y)
抛物线y2 =2px(p>0)的参数方程为:
x=2pt2 , (t为参数,t R
1 其中参数t= ( 0),当 =0时,t=0. tan 几何意义为: 抛物线上除顶点外的任意一点与原点连线的斜率的倒数。
通过代入消元法消去参数t ,
可得普通方程y=2x-4 (x≥0)。
注意:
在参数方程与普通方程的互化中,必须使x,y的取值范 围保持一致。否则,互化就是不等价的.
例3、把下列参数方程化为普通方程, 并说明它们各表示什么曲线?
x= t 1 (1) (t为参数) y 1 2 t
步骤:(1)消参; (2)注意取值范围。
(3)
y=t2+1/t2
(1)(x-2)2+y2=9 (2)y=1- 2x2(- 1≤x≤1) (3)x2- y=2(X≥2或x≤- 2)
(2)普通方程化为参数方程需要引入参数。
如:①直线L 的普通方程是2x-y+2=0,可以化为参数方程
x t, (t为参数) y 2t 2.
为(2 cos ,2 sin ) ,由中点公式可得:
x 2 cos 6 2 sin cos 3, y sin 2 2
所以,点M的轨迹的参数方程是
经典常见曲线的参数方程.ppt

y
a(sint
t
cos t)
y
M (x,y)
a
t
0
a
试由这.精些品课关件.系推出曲线的方程
t x
.
27
7.狄卡儿叶形线 x 3 y 3 3axy 0 (a 0)
分析 1. 曲线关于 y= x 对称
2. 曲线有渐进线 x+y+a = 0
3. 令 y = t x, 得参数式
当 t , ( x, y) (0,0) 当 t 0, 也有( x, y) (0,0)
a
.精品课件.
x
3
.
来看动点的慢动作
.精品课件.
x
4
参数方程
x = a (t – sint) y = a (1– cost)
y
t 的几何意义如图示
当 t 从 0 2,x从 0 2a 即曲线走了一拱
2a at
0
a
.精品课件.
a
2a
x
.
5
y
o
Mt a
A
C
x
x AC OM sin t y OC OM cos t
故在原点,曲线自身相交.
x
3at t3 1
y
3at 2 t3 1
(- t , t -1)
4. 当 t 由 ,
动点由(0,0) (,-) 当 t 由 ,
动点由( ,) (0,0)
当 t 由 ,
动点由 (0,0) (0,0)
依逆时针方向画出叶形线.
.精品课件.
28
y
0
x
曲线关于 y= x 对称
常见曲线的参数方程
.精品课件.
1
曲线的参数方程
如果t 是常数,θ 是参数,那么可以利用公式
������
sin2θ+cos2θ=1 消参;如果 θ 是常数,t 是参数,那么适当变形后可以利
用
������ + 1
2
−
������
������-
1 ������
2
= 4 消参.
-13-
【做一做3-2】 已知圆的方程为x2+y2-6y=0,将它化为参数方程.
解:由x2+y2-6y=0,
得x2+(y-3)2=9.
令x=3cos θ,y-3=3sin θ,
所以圆的参数方程为
������ ������
= =
3cos������, 3 + 3sin������
(������为参数).
-9-
∗
, 并且对于������的每一个允许值, 由方程组
∗ 所确定的点������ ������, ������ 都在这条曲线上, 那么方程 ∗ 就叫做这条曲
线的参数方程, 联系变数������, ������的变数������叫做参变数, 简称参数. 相对于
参数方程而言, 直接给出点的坐标间关系的方程叫做普通方程.
(2)参数是联系变数x,y的桥梁,可以是一个有物理意义或几何意
义的变数,也可以是没有明显实际意义的变数.
-4-
一 曲线的参数方程
目标导航
Z Z D 知识梳理 HISHISHULI
重难聚焦
HONGNANJUJIAO
典例透析
IANLITOUXI
【做一做 1】
若点 P(2,4)在参数方程
常见曲线的参数方程

2.2 常见曲线的参数方程 第一节 圆锥曲线的参数方程一椭圆的参数方程1、中心在坐标原点,焦点在x 轴上,标准方程是22221(0)x y a b a b+=>>的椭圆的参数方程为cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数)同样,中心在坐标原点,焦点在y 轴上,标准方程是22221(0)y x a b a b+=>>的椭圆的参数方程为cos (sin x b y a ϕϕϕ=⎧⎨=⎩为参数)2、椭圆参数方程的推导如图,以原点O 为圆心,,()a b a b o >>为半径分别作两个同心圆,设A 为大圆上的任一点,连接OA ,与小圆交于点B ,过点,A B 分别作x 轴,y 轴的垂线,两垂线交于点M 。
设以Ox 为始边,OA 为终边的角为ϕ,点M 的坐标是(,)x y 。
那么点A 的横坐标为x ,点B 的纵坐标为y 。
由于点,A B 都在角ϕ的终边上,由三角函数的定义有cos cos ,sin sin x OA a y OB b ϕϕϕϕ==== 3当半径OA 绕点O 旋转一周时,就得到了点M 的轨迹,它的参数方程是cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数)这是中心在原点O ,焦点在x 轴上的椭圆的参数方程。
3、椭圆的参数方程中参数ϕ的意义 圆的参数方程cos (sin x r y r θθθ=⎧⎨=⎩为参数)中的参数θ是动点(,)M x y 的旋转角,但在椭圆的参数方程cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数)中的参数ϕ不是动点(,)M x y 的旋转角,它是动点(,)M x y 所对应的圆的半径OA (或OB )的旋转角,称为点M 的离心角,不是OM 的旋转角,通常规定[)0,2ϕπ∈ 4、椭圆参数方程与普通方程的互化可以借助同角三角函数的平方关系将普通方程和参数方程互化。
①由椭圆的参数方程cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数,0)a b >>,易得cos ,sin x ya b ϕϕ==,可以利用平方关系将参数方程中的参数ϕ化去得到普通方程22221(0)x y a b a b+=>>②在椭圆的普通方程22221(0)x y a b a b +=>>中,令cos ,sin x ya bϕϕ==,从而将普通方程化为参数方程cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数,0)a b >>注:①椭圆中参数的取值范围:由普通方程可知椭圆的范围是:,a x a b y b -≤≤-≤≤,结合三角函数的有界性可知参数[)0,2ϕπ∈②对于不同的参数,椭圆的参数方程也有不同的呈现形式。
一、曲线的参数方程

参数方程与解析几何的关系
参数方程是解析几何的基本工具 之一
在解析几何中,参数方程被广泛应用于描述几何图形, 它提供了比直角坐标方程更加灵活和方便的描述方式。
参数方程与极坐标方程的转换
在某些情况下,可以将参数方程转换为极坐标方程,以 便利用极坐标的性质来研究曲线的性质。
THANKS FOR WATCHING
参数方程导数的计算方法
通过对方程中的参数求导,并利用链式法则和乘积法则进行计算。
参数方程的积分
参数方程的积分定义
参数方程的积分是表示曲线与坐标轴围成的面积的数学工具。
参数方程积分的几何意义
参数方程的积分表示曲线与坐标轴围成的面积,即曲线在某一区间 上的长度。
参数方程积分的计算方法
通过对方程中的参数进行不定积分,并利用微积分基本定理进行求 解。
通过参数t将曲线上的点与实数轴上的点一一对应起来。
参数方程的表示形式
显式参数方程
x=x(t),y=y(t),z=z(t)的形式,其中 x、y、z是参数t的函数。
隐式参数方程
通过方程F(x,y,z)=0表示,其中F是参 数t的函数。
参数方程与直角坐标方程的转换
直角坐标方程
01
通过x、y、z来表示曲线上点的坐标。
一、曲线的参数方程
目 录
• 参数方程的基本概念 • 参数方程在曲线表示中的应用 • 参数方程的物理意义 • 参数方程的微积分性质 • 参数方程的几何意义
01 参数方程的基本概念
参数方程的定义
参数方程
由参数t表示的方程组,其中x、y是参数t的函数。
参数方程的一般形式
x=x(t),y=y(t)。
参数方程的特点
详细描述
常见曲线的参数方程

双曲线参数方程
04
双曲线标准形式及性质
标准形式
$frac{x^2}{a^2} - frac{y^2}{b^2} = 1$ ($a, b > 0$)
性质
双曲线有两个焦点,位于x轴上,距离原点的距离为$c$,其中$c^2 = a^2 + b^2$。双曲线上的任意一点到两 焦点的距离之差为定值$2a$。
椭圆性质
椭圆有两个焦点,任意一点到两焦点 的距离之和等于长轴的长度;椭圆关 于中心对称,也关于两焦点所在的直 线对称。
椭圆参数方程推导
参数方程形式
$x = acostheta, y = bsintheta$,其中$theta$为参数,表 示与$x$轴的夹角。
推导过程
由椭圆的标准形式,设$x = acostheta$,代入椭圆方程可得 $y = pm bsqrt{1 - frac{x^2}{a^2}} = pm bsqrt{1 cos^2theta} = pm bsintheta$。由于椭圆关于$x$轴对称, 故取正号,得到椭圆的参数方程。
常见曲线的参数方程
汇报人:XX
contents
目录
• 曲线基本概念与分类 • 直线与圆参数方程 • 椭圆参数方程 • 双曲线参数方程 • 抛物线参数方程 • 空间曲线参数方程简介
曲线基本概念与分
01
类
曲线定义及性质
曲线定义
曲线是动点运动时,其位置随时 间连续变化所形成的轨迹。
曲线性质
曲线具有连续性、光滑性、可微 性等性质,这些性质决定了曲线 的形态和特性。
参数方程定义
参数方程是一种通过引入参数来表示 变量间关系的方程形式。在参数方程 中,曲线的坐标被表示为参数的函数 。
空间曲线与曲面的参数方程与性质

空间曲线与曲面的参数方程与性质空间曲线和曲面是数学中重要的概念,它们在几何学和物理学等领域中有广泛的应用。
本文将介绍空间曲线和曲面的参数方程以及它们的性质。
一、空间曲线的参数方程与性质空间曲线是指在三维空间中由一组点构成的连续曲线。
为了描述和研究曲线的性质,可以使用参数方程来表示曲线上的点的坐标。
设曲线上的点的坐标为(x, y, z),曲线的参数为t,则曲线的参数方程可以表示为:x=f(t)y=g(t)z=h(t)其中f(t),g(t),h(t)是t的函数,且在t的定义域上连续可导。
空间曲线的参数方程可以灵活地描述曲线的形状,在计算和分析上也更具优势。
根据具体的问题和曲线的特点,可以选择不同的参数方程来表达。
根据参数方程,可以计算曲线上各个点的切向量、曲率、弧长等性质。
切向量表示曲线在该点的切线方向,曲率描述曲线在该点的弯曲程度,而弧长则是曲线上两个点之间的距离。
二、空间曲面的参数方程与性质空间曲面是指在三维空间中由一组点构成的连续曲面。
为了描述和研究曲面的性质,同样可以使用参数方程来表示曲面上的点的坐标。
设曲面上的点的坐标为(x, y, z),曲面的参数为u和v,则曲面的参数方程可以表示为:x=f(u, v)y=g(u, v)z=h(u, v)其中f(u, v),g(u, v),h(u, v)是u和v的函数,且在参数域上连续可导。
空间曲面的参数方程可以将曲面分解成u和v两个变量的函数,对于复杂的曲面,参数方程的使用相对简单和便捷。
通过参数方程可以计算曲面上各个点的法向量、曲率、面积等性质。
法向量表示曲面在该点的法线方向,曲率描述曲面在该点的弯曲程度,而面积则是曲面上某一区域的大小。
三、空间曲线与曲面的参数方程的关系与应用空间曲线和曲面的参数方程之间存在密切的联系。
实际上,曲线可以被看作是曲面上的一条特殊轨迹。
通过曲线的参数方程,可以确定曲线在曲面上的位置和方向。
而通过曲面的参数方程,可以描述曲线所在的曲面的形状和性质。
13.2 参数方程
1 (2)若把曲线 C1 上各点的横坐标压缩为原来的 倍,纵坐 2
3 标压缩为原来的 倍得到曲线 C2,设点 P 是曲线 C2 上的一 2
个动点,求它到直线 l 的距离的最小值. 思维导引:(1)先把直线和圆的参数方程化为普通方程,然 后利用直线被圆所截弦长公式求解;(2)先根据伸缩变换 写出曲线 C2 的参数方程,从而写出点 P 的坐标,然后根据点 到直线的距离公式求出目标函数,最后求最值.
考点二 参数方程及其应用
【例 2】 (2013 内蒙古包头市模拟)已知直线
1 x 1 t, x cos , 2 l: (t 为参数),曲线 C1: y sin y 3t 2
(θ 为参数). (1)设 l 与 C1 相交于 A、B 两点,求|AB|;
3 d 取得最小值,最小值为 (- 2 +2)= 4
反思归纳
一般地 ,如果题目中涉及圆、椭圆
上的动点或求最值范围问题时可考虑用参数方 程,设曲线上点的坐标,将问题转化为三角恒等 变换问题解决,使解题过程简单明了.
即时突破 2 已知点 P(x,y)是圆 x +y =2y 上的动点 .
(1)求 2x+y 的取值范围; (2)若 x+y+a ≥0 恒成立,求实数 a 的范围.
π ρ cos =t,若两曲线有公共点,则 t 的取值范 3
围是 .
解析:将曲线 C1 的参数方程化为普通方程得 (x-2)2+y2=4, 即曲线 C1 是以(2,0)为圆心,2 为半径的圆, 将曲线 C2 的极坐标方程化成直角坐标方程得 x- 3 y-2t=0.
∵两曲线有公共点, ∴圆心(2,0)到直线 x- 3 y-2t=0 的距离
参数方程的曲率公式推导
参数方程的曲率公式推导曲线的参数方程表示为:$$\begin{cases}x = f(t) \\y = g(t)\end{cases}$$其中,$f(t)$和$g(t)$是关于参数$t$的函数。
我们先求曲线的切矢量$\vec{T}$:$$\vec{T} = \frac {d\vec{r}}{ds}$$其中,$\vec{r}$表示曲线上的任意一点$(x, y)$,$s$表示曲线上的弧长。
我们有:$$d\vec{r} = \frac {dx}{dt} dt \vec{i} + \frac {dy}{dt} dt \vec{j} = \left(\frac {dx}{dt} \vec{i} + \frac {dy}{dt} \vec{j}\right) dt =\vec{v} dt$$其中,$\vec{v}$表示曲线上的速度向量。
因此,切矢量$\vec{T}$可以表示为:$$\vec{T} = \frac {\vec{v}}{v} = \frac {\left(\frac {dx}{dt} \vec{i} + \frac {dy}{dt} \vec{j}\right)}{\sqrt{\left(\frac {dx}{dt}\right)^2 + \left(\frac {dy}{dt}\right)^2}} = \frac {\frac {dx}{dt} \vec{i} + \frac {dy}{dt} \vec{j}}{\sqrt{\left(\frac {dx}{dt}\right)^2 +\left(\frac {dy}{dt}\right)^2}}$$接下来,我们求曲线的曲率$K$,曲率的定义为:$$K = \left|\frac {d\vec{T}}{ds}\right|$$其中,$|\cdot|$表示向量的模。
我们有:$$\frac {d\vec{T}}{ds} = \frac {d}{ds}\left(\frac {\vec{v}}{v}\right) = \frac {\frac {d}{dt}\left(\frac {\vec{v}}{v}\right)}{\frac{ds}{dt}} = \frac {\frac {d}{dt}\left(\frac {\frac{d\vec{r}}{dt}}{\sqrt{\left(\frac {dx}{dt}\right)^2 + \left(\frac {dy}{dt}\right)^2}}\right)}{\sqrt{\left(\frac {dx}{dt}\right)^2 +\left(\frac {dy}{dt}\right)^2}} = \frac {\frac {d}{dt}\left(\frac{\vec{v}}{\sqrt{\left(\frac {dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2}}\right)}{\sqrt{\left(\frac {dx}{dt}\right)^2 +\left(\frac {dy}{dt}\right)^2}}$$将曲线的速度向量$\vec{v} = \frac {dx}{dt} \vec{i} + \frac {dy}{dt} \vec{j}$代入,得到:$$\frac {d\vec{T}}{ds} = \frac {\frac {d}{dt}\left(\frac {\frac {dx}{dt} \vec{i} + \frac {dy}{dt} \vec{j}}{\sqrt{\left(\frac {dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2}}\right)}{\sqrt{\left(\frac {dx}{dt}\right)^2 +\left(\frac {dy}{dt}\right)^2}}$$对$\frac {\frac {dx}{dt}}{\sqrt{\left(\frac {dx}{dt}\right)^2 +\left(\frac {dy}{dt}\right)^2}}$和$\frac {\frac{dy}{dt}}{\sqrt{\left(\frac {dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2}}$进行求导,利用链式法则,得到:$$\frac {d}{dt}\left(\frac {\frac {dx}{dt}}{\sqrt{\left(\frac{dx}{dt}\right)^2 + \left(\frac {dy}{dt}\right)^2}}\right) = \frac {\frac {d^2x}{dt^2}}{\sqrt{\left(\frac {dx}{dt}\right)^2 +\left(\frac {dy}{dt}\right)^2}} - \frac {\left(\frac {dx}{dt}\right)^2 \frac {d}{dt}\left(\frac {\frac {dx}{dt}}{\sqrt{\left(\frac{dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2}}\right)}{\left(\sqrt{\left(\frac {dx}{dt}\right)^2 + \left(\frac {dy}{dt}\right)^2}\right)^2}$$将上式中的$\frac {\frac {dx}{dt}}{\sqrt{\left(\frac{dx}{dt}\right)^2 + \left(\frac {dy}{dt}\right)^2}}$替换为切矢量$\vec{T}$,可得:$$\frac {d}{dt}\left(\frac {\vec{T_x}}{\sqrt{\vec{T_x^2} +\vec{T_y^2}}}\right) = \frac {\frac{d^2x}{dt^2}}{\sqrt{\vec{T_x^2} + \vec{T_y^2}}} - \frac{\vec{T_x^2} \frac {d}{dt}\left(\frac{\vec{T_x}}{\sqrt{\vec{T_x^2} +\vec{T_y^2}}}\right)}{\left(\sqrt{\vec{T_x^2} +\vec{T_y^2}}\right)^2}$$同理,$\frac {\frac {dy}{dt}}{\sqrt{\left(\frac {dx}{dt}\right)^2 + \left(\frac {dy}{dt}\right)^2}}$对$t$求导得:$$\frac {d}{dt}\left(\frac {\vec{T_y}}{\sqrt{\vec{T_x^2} +\vec{T_y^2}}}\right) = \frac {\frac{d^2y}{dt^2}}{\sqrt{\vec{T_x^2} + \vec{T_y^2}}} - \frac{\vec{T_y^2} \frac {d}{dt}\left(\frac{\vec{T_y}}{\sqrt{\vec{T_x^2} +\vec{T_y^2}}}\right)}{\left(\sqrt{\vec{T_x^2} +\vec{T_y^2}}\right)^2}$$由于$\vec{T_x} = \frac {dx}{dt}$,$\vec{T_y} = \frac{dy}{dt}$,代入上面的两个式子,并利用$\frac {d^2x}{dt^2} = \frac {d}{dt}\left(\frac {dx}{dt}\right)$和$\frac {d^2y}{dt^2} = \frac {d}{dt}\left(\frac {dy}{dt}\right)$,可得:$$\frac {d\vec{T}}{ds} = \frac {\frac{d^2x}{dt^2}}{\sqrt{\vec{T_x^2} + \vec{T_y^2}}} - \frac{\vec{T_x^2} \frac{d^2\vec{T_x}}{ds^2}}{\left(\sqrt{\vec{T_x^2} +\vec{T_y^2}}\right)^2} + \frac {\frac{d^2y}{dt^2}}{\sqrt{\vec{T_x^2} + \vec{T_y^2}}} - \frac{\vec{T_y^2} \frac{d^2\vec{T_y}}{ds^2}}{\left(\sqrt{\vec{T_x^2} +\vec{T_y^2}}\right)^2}$$将$\vec{T_x}^2 + \vec{T_y}^2 = 1$代入,并整理,可得:$$\frac {d\vec{T}}{ds} = \frac {d^2x}{dt^2} \vec{T_x} + \frac {d^2y}{dt^2} \vec{T_y} - \left(\frac {d^2x}{dt^2} \vec{T_x}^2 +\frac {d^2y}{dt^2} \vec{T_y}^2\right) \vec{T}$$进一步整理,可得曲率$K$的表达式为:$$K = \left|\frac {d\vec{T}}{ds}\right| = \sqrt{\left(\frac{d^2x}{dt^2}\right)^2 + \left(\frac {d^2y}{dt^2}\right)^2} $$上述表达式即为参数方程的曲率公式。
常见曲线的参数方程课件

=1+cos
.
. . . .
令 cos2 = 0, θ k
例3.求曲线 r sinθ 及 r 2 cos θ 分别所围成的图形的公 共 部分的面积 θ θ , 联立后得交点坐标 y
由 sin > 0, θ
y
P r
x
o
2a
.
y
5.星形线(圆内旋轮线)
一圆沿另一圆 内缘无滑动地 滚动,动圆圆
周上任一点
所画出的曲线。 –a
a 4
o
a x
y
.
–a
o
a x
来看动点的慢动作
y
–a
o
a x
来看动点的慢动作
.
y
直角坐标方程为:
x y a
2 3
2 3
2 3
P
.
.
–a
o
a x
极坐标方程为
x a cos3 3 y a si n
当 t 由 ,
动点由 (0,0) (0,0) 依逆时针方向画出叶形 线.
1. 曲线关于 y= x 对称 2. 曲线有渐进线 x+y+a = 0 3. 令 y = t x, 得参数式
3at x 3 t 1 2 3 at y t3 1
(- t , t -1)
a
x
.
x
来看动点的慢动作
参数方程 x = a (t – sint) y = a (1– cost)
y
t 的几何意义如图示
当 t 从 0 2,x从 0 2a 即曲线走了一拱
直角坐标系中曲线的参数方程

参数方程的参数范围和周期性
参数t有一个特定的取值范围,表示曲线上点的运动轨迹。当 参数t超出其取值范围时,曲线上的点会重复出现。
对于具有周期性的曲线,其参数方程可能具有周期性,即当 参数t增加一个特定的值时,曲线上的点会重复出现。这种周 期性可以通过观察曲线的形状和参数t的变化规律来识别。
04
参数方程的求解方法
参数方程用于描述曲线的形状和变化 规律,通过设定参数的变化范围,可 以绘制出完整的曲线图形。
参数方程简化了曲线绘制的计算过程 ,使得绘制复杂的曲线变得相对简单 。
参数方程在解决物理问题中的应用
在物理问题中,很多物理量是随时间 变化的,参数方程可以描述这种变化 过程,帮助我们理解物理现象和规律。
例如,振动和波动的问题可以用参数 方程来描述,通过求解参数方程,可 以得到物理量的变化规律。
利用三角函数求解参数方程
总结词
利用三角函数求解参数方程是一种常见的方法,适用于参数方程中含有三角函数的情况。
详细描述
当参数方程中含有三角函数时,可以利用三角函数的性质和恒等式来求解。例如,如果 参数方程中包含正弦函数和余弦函数,可以利用三角恒等式将它们转换为单一的三角函 数形式,从而简化求解过程。此外,还可以利用三角函数的周期性和对称性等性质来简
05
参数方程的应用实例
地球的运动轨迹描述
要点一
总结词
参数方程在描述地球的运动轨迹时,可以精确地表示地球 绕太阳的椭圆轨道。
要点二
详细描述
参数方程通过引入两个参数(通常是时间和角度)来表示 地球在直角坐标系中的位置,能够精确地描述地球绕太阳 的椭圆轨道,包括地球的近日点和远日点。
摆线的参数方程表示
参数方程与直角坐标方程的转换
求曲线的参数方程如何选定参数
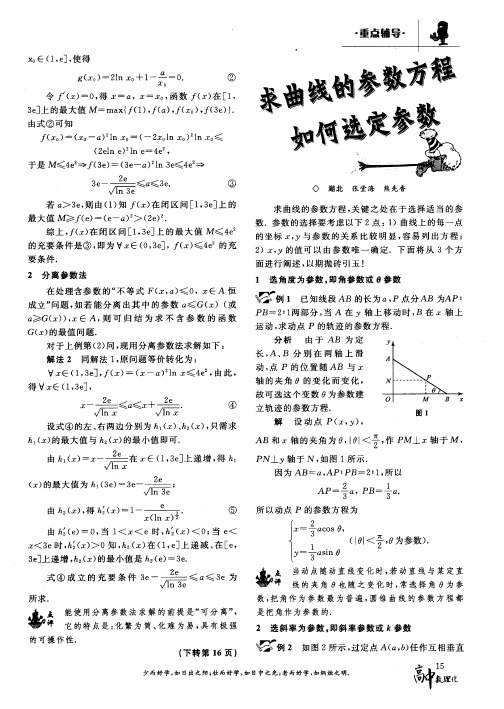
f( x 0 ) : = = ( z0 - a) i n 0 一( 一2 x 0 I n z o ) i n z0 ≤
( 2 e l n e ) i n e 一4 e ,
黎
于是 M≤4 e 厂 ( 3 e ) =( 3 e 一口 ) 。 l n 3 e ≤4 e 3 e 一 竺= ≤ 口 ≤3 e .
是把 角作 为参数 的.
所求 .
点 能使 用分 离参 数 法 求解 的前 提 是“ 可分 离” , 评 它 的特 点是 : 化 繁 为简 、 化 难 为 易, 具有极 强
的可操 作 性. ( 下转第 l 6页 )
2ቤተ መጻሕፍቲ ባይዱ选斜 率 为参数 。 即斜 率参 数或 参 数
■, _ 、,.
动, 点 P 的位 置 随 AB 与 z
轴 的夹 角 的变 化 而 变 化 , 故 可选 这个 变数 为参 数建
立 轨迹 的参 数方 程.
解 设 动 点 P( z, ) ,
图l
设 式④ 的左 、 右 两边 分别 为 h ( ) 、 h z ( z ) , 只需 求
例 2 如 图 2所示 , 过定点 A( a , 6 ) 任 作互 相垂 直
少而 好 学 , 如 日 出之 阳 ; 壮 而好 学 , 如 日中之 光 ; 老 而好 学 , 如 炳 烛 之 明
的两 条直 线 z 与 z , 且l 与 z轴 交于 点 M , z z 与 Y轴 交 于点 N , l 与 轴 不垂直 , 求 线段 MN 的 中点 P 的 轨 迹 的参 数方 程. 分析 斜 率 是 刻 画 直
■r I ,
的充 要条 件是 ③ , 即为 Vz∈( 0 , 3 e l , ,( z ) ≤4 e 的充
空间曲线参数方程

空间曲线参数方程
空间曲线参数方程:x = cos(t), y = sin(t), z = t
空间曲线是三维空间中的一条曲线,可以用参数方程来表示。
在这个参数方程中,x和y分别是t的余弦和正弦,z是t本身。
这个曲线的形状是一个螺旋形,它在x-y平面上绕着原点旋转,同时沿着z 轴方向上升。
这个曲线的形状非常有趣,它可以用来描述很多物理现象。
例如,我们可以用这个曲线来描述一个螺旋形的弹簧,当弹簧被拉伸或压缩时,它的形状就会变成这个曲线。
此外,这个曲线还可以用来描述一些天文现象,例如螺旋星系的形状。
在数学上,这个曲线也有很多有趣的性质。
例如,它是一条无限长的曲线,因为当t趋近于正无穷或负无穷时,曲线会无限延伸。
此外,这个曲线还是一条光滑的曲线,因为它的导数在整个定义域内都存在。
这个曲线还有一个有趣的性质,就是它的曲率是不断增加的。
曲率是描述曲线弯曲程度的量,它的大小与曲线的弯曲程度成正比。
在这个曲线中,曲率随着t的增加而增加,这意味着曲线的弯曲程度也在不断增加。
空间曲线参数方程x = cos(t), y = sin(t), z = t是一个非常有趣的曲线,它可以用来描述很多物理现象和天文现象。
此外,它还有很多有趣
的数学性质,例如无限长、光滑和曲率不断增加等。
2.1.曲线的参数方程PPT课件

6
一、方程组有3个变量,其中的x,y表示点的 坐标,变量t叫做参变量,而且x,y分别是t的 函数。
二、由物理知识可知,物体的位置由时间t唯 一决定,从数学角度看,这就是点M的坐标 x,y由t唯一确定,这样当t在允许值范围内连 续变化时,x,y的值也随之连续地变化,于是 就可以连续地描绘出点的轨迹。
这就是圆心在原点O,
o
M0 x
半径为r的圆的参数方程。
其中参数t有明确的物理意义
(质点作匀速圆周运动的 2时 021 刻)
16
考 虑 到 = t , 也 可 以 取 为 参 数 ,
y
于 是 有{xy rrcso ins(为 参 数 )
M(x,y)
这也是圆心在原点O,
r
半径为r的圆的参数方程
o
其 中 参 数 的 几 何 意 义 是 :
(1)普通方程化为参数方程需要引入参数
如:①直线L 的普通方程是2x-y+2=0,可以化为参
数方程
x
y
t, 2t
(t为参数)
2.
②在普通方程xy=1中,令x = tan,可以化为参数方程
x tan ,
y
cot .
(为参数)
2021
27
(2)参数方程通过代入消元或加减消元消去参数化为
普通方程
投放点
提示: 即求飞行员在离救援点的水平距离 多远时,开始投放物资?
? 救援点
1、参数方程的概念:
如图,一架救援飞机在离灾区地面500m高处以100m/s 的速度作水平直线飞行. 为使投放救援物资准确落于灾 区指定的地面(不记空气阻力),飞行员应如何确定投放 时机呢? 设飞机在点A将物资投出机舱,
如:①参数方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
解析几何
解:取直角坐标系,设半径为a的圆在x轴上滚动, 开始时点P恰好在原点O,经过一段时间的滚动, 圆与x轴的切点移到A点,圆心移到C点,这时有 r OP OA AC CP, 设 (CP, CA),于是 (, i CP) ( ), 2 则CP ia cos (
过O点垂直于OA的直线为y轴,经过一段时间后,小圆与大圆的接触点为B,并设小
§2.1 平面曲线的方程
解析几何
一、曲线的方程 定义1
当平面上取定了坐标系之后,如果一个方程与一条曲线之
间有着关系: ①满足方程的 x, y 必是曲线上某一点的坐标; ②曲线上任何一点的坐标 x, y 满足这个方程, 那么这个方程就叫做这条曲线的方程,这条曲线叫做这个方程
再两边平方整理得xy=2,(4)
解析几何
方程(2)与(3)同解,而(4)与 (3)却不同解,但附加条件x y 2 0 即x y 2后(4)与(3),(2)都是同 解的,所以方程xy=2(x y 2) 为所求动点M的轨迹方程.
解析几何
三、常见曲线的参数方程
(1) 一个半径为r 的小圆在半径为R 的大圆内无滑动地滚动,小圆周上一 定点P 的运动轨迹称为内摆线(hypocycloid)
例4 已知大圆半径为a ,小圆半径为b,设大圆不动, 而小圆在大圆内无滑动地滚动,求动圆周上某一定
的图形。
概括言之,曲线上的点和方程之间存在着一一对应的关系
解析几何
例1
求圆心在原点,半径为R 的圆的方程
解:由圆的定义,任意一点M(x,y)在圆上的充要条件是M到 圆心O的距离等于半径R,即 OM R,由两点间的距离公式可得 x 2 y2 R, (1)
点P 的轨迹方程
解析几何
解:设运动开始时动点P与大圆周上的点A重合,并取大圆中心O为原点,OA为x轴 圆中心为C,则C一定在半径OB上,显然有r OP OC CP, 设 = (, i OC ), (CP, CB),则OC ( i a -b)cos + ( j a b) sin , a ba 且有a AB PB b,所以 = , (, i CP)= - = , b b ba ba 又 CP b,所以CP ib cos jb sin b b ab ab ib cos jb sin , b b ab ab r ( a b ) cos b cos i ( a b ) sin b sin j. b b 此式即为内旋轮线的向量式参数方程,
ቤተ መጻሕፍቲ ባይዱ
2
) ja sin (
2
)=(-asin)( i -acos) j.
又因为 OA AP a,所以OA a i, AC a j , 故r a sin i a 1 cos j 即为所求P点轨迹的向量式参数方程, 其中( )为参数.
MA MB 4
解:动点M(x,y)在轨迹上的充要条件是 MA MB 4,即
2 2 2 2 (x 2) (y 2) (x 2) (y 2) 4,(2) 2 2 2 2 移项得 (x 2) (y 2) (x 2) (y 2) 4, 2 2 两边平方整理得 (x 2) (y 2) x y 2,(3)
x x t , a t b 其坐标式参数方程为: y y t
解析几何
例3 一个园在一直线上无滑动地滚动,求圆上一定点的轨迹
该定点的轨迹为旋轮线或摆线(cycloid)
解析几何
二、曲线的参数方程
定义2 若取 t a t b 的一切可能取值 ①由 r t x t e1 y t e2 a t b 表示的向径 r t 的终点总在一条曲线上
②在这条曲线上的任意点,总对应着以它为终点的向径,而这向径可由 t
的某一值 t0 a t0 b 通过 r t x t e1 y t e2 a t b 完全决定, 那么就把 r t x t e1 y t e2 a t b 叫做曲线的向量式参数方程,
其中 t 为参数。
解析几何
取直角坐标系,设半径为a的圆在x轴上滚动, 开始时点P恰好在原点O,设P点的坐标为(x,y), 可得P点的坐标式参数方程为 x a sin ,( ) y a 1 cos 取0 时,消去参数,可得P点轨迹 在0 时的普通方程为 a y x=aarccos 2ay y 2 . a
两边平方可得x 2 y 2 R 2 .(2.1.1) 方程()与( 1 2.1.1)完全同解,所以(2.1.1)即为所求圆的方程.
类似可得圆心在(a,b)半径为R的圆的方程为 (x-a)2 ( y b)2 R2 .
解析几何
例2 已知两点A 2, 2 和 B 2, 2,求满足条件 的动点M 的轨迹方程