队列的介绍和利用环形队列实现STM32进阶之串口环形缓冲区的概述
环形缓冲区 c语言 实现

环形缓冲区 c语言实现环形缓冲区是一种常用的数据结构,可以用于在数据的不断产生和消费过程中,存储和管理数据。
在C语言中,实现环形缓冲区可以采用数组的方式来存储数据,具体实现过程如下。
1.首先需要定义一个环形缓冲区的结构体,包括环形缓冲区的大小、头部指针和尾部指针等信息。
例如:```ctypedef struct {uint8_t *buffer; //缓冲区地址uint32_t size; //缓冲区大小uint32_t in; //头部指针uint32_t out; //尾部指针} ring_buffer_t;```2.初始化缓冲区,为环形缓冲区指针分配内存。
例如:```cvoid ring_buffer_init(ring_buffer_t *ring_buffer, uint8_t*buffer, uint32_t size) {ring_buffer->buffer = buffer;ring_buffer->size = size;ring_buffer->in = 0; //初始化头指针为0ring_buffer->out = 0; //初始化尾指针为0}```3.向环形缓冲区写入数据。
如果缓冲区已满,需要等待缓冲区有空位;如果缓冲区未满,则将数据写入缓冲区尾部,并将尾指针向后移动一个位置。
例如:```cvoid ring_buffer_write(ring_buffer_t *ring_buffer, uint8_t*data, uint32_t length) {for (uint32_t i = 0; i < length; i++) {//判断缓冲区是否已满if (((ring_buffer->in + 1) % ring_buffer->size) != ring_buffer->out) {//写入数据ring_buffer->buffer[ring_buffer->in] = data[i]; //移动头指针ring_buffer->in = (ring_buffer->in + 1) %ring_buffer->size;} else {//缓冲区已满,等待有空位}}}```4.从环形缓冲区读取数据。
环形缓冲区及实现原理
在通信程序中,经常使用环形缓冲区作为数据结构来存放通信中发送和接收的数据。
环形缓冲区是一个先进先出的循环缓冲区,可以向通信程序提供对缓冲区的互斥访问。
1、环形缓冲区的实现原理环形缓冲区通常有一个读指针和一个写指针。
读指针指向环形缓冲区中可读的数据,写指针指向环形缓冲区中可写的缓冲区。
通过移动读指针和写指针就可以实现缓冲区的数据读取和写入。
在通常情况下,环形缓冲区的读用户仅仅会影响读指针,而写用户仅仅会影响写指针。
如果仅仅有一个读用户和一个写用户,那么不需要添加互斥保护机制就可以保证数据的正确性。
如果有多个读写用户访问环形缓冲区,那么必须添加互斥保护机制来确保多个用户互斥访问环形缓冲区。
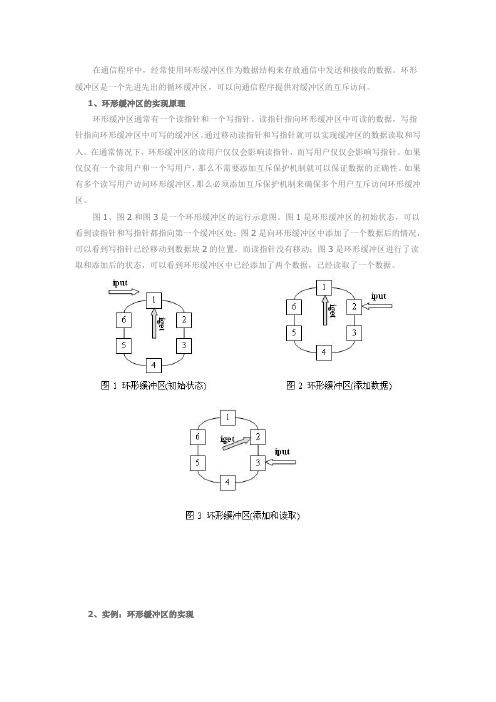
图1、图2和图3是一个环形缓冲区的运行示意图。
图1是环形缓冲区的初始状态,可以看到读指针和写指针都指向第一个缓冲区处;图2是向环形缓冲区中添加了一个数据后的情况,可以看到写指针已经移动到数据块2的位置,而读指针没有移动;图3是环形缓冲区进行了读取和添加后的状态,可以看到环形缓冲区中已经添加了两个数据,已经读取了一个数据。
2、实例:环形缓冲区的实现环形缓冲区是数据通信程序中使用最为广泛的数据结构之一,下面的代码,实现了一个环形缓冲区:/*ringbuf .c*/#include<stdio. h>#include<ctype. h>#define NMAX 8int iput = 0; /* 环形缓冲区的当前放入位置*/int iget = 0; /* 缓冲区的当前取出位置*/int n = 0; /* 环形缓冲区中的元素总数量*/double buffer[NMAX];/* 环形缓冲区的地址编号计算函数,如果到达唤醒缓冲区的尾部,将绕回到头部。
环形缓冲区的有效地址编号为:0到(NMAX-1)*/int addring (int i){return (i+1) == NMAX ? 0 : i+1;}/* 从环形缓冲区中取一个元素*/double get(void){int pos;if (n>0){Pos = iget;iget = addring(iget);n--;return buffer[pos];}else {printf(“Buffer is emptyn”);return 0.0;}/* 向环形缓冲区中放入一个元素*/void put(double z)if (n<NMAX){buffer[iput]=z;iput = addring(iput);n++;}elseprintf(“Buffer is fulln”);}int main{void){chat opera[5];double z;do {printf(“Please input p|g|e?”);scanf(“%s”, &opera);switch(tolower(opera[0])){case ‘p’: /* put */printf(“Please input a float number?”);scanf(“%lf”, &z);put(z);break;case ‘g’: /* get */z = get();printf(“%8.2f from Buffern”, z);break;case ‘e’:printf(“Endn”);break;default:printf(“%s - Operation command error! n”, opera);}/* end switch */}while(opera[0] != ’e’);return 0;在CAN通信卡设备驱动程序中,为了增强CAN通信卡的通信能力、提高通信效率,根据CAN的特点,使用两级缓冲区结构,即直接面向CAN通信卡的收发缓冲区和直接面向系统调用的接收帧缓冲区。
有限状态机 消息队列环形缓冲区处理器通讯协议
有限状态机消息队列环形缓冲区处理器通讯协议一、引言有限状态机(Finite State Machine,FSM)是一种非常重要的计算机模型,在信息处理、控制系统、通信系统等领域都有着广泛的应用。
消息队列、环形缓冲区、处理器通讯协议则是与FSM密切相关的概念和技术。
本文将深入探讨这些主题,并分析它们的联系和应用。
二、有限状态机(FSM)1. 有限状态机概述有限状态机是一种数学模型,用于描述有限个状态以及在这些状态之间的转移和行为。
在计算机科学中,FSM常被用来建模计算、控制和通信等系统。
它具有状态、转移和行为三要素,能清晰地描述系统的运行逻辑和状态变化。
2. 有限状态机的应用在现代计算机系统中,有限状态机被广泛应用于编译器、操作系统、网络协议、人机交互等方面。
它可以帮助我们理解和分析复杂系统的行为,是软件工程中重要的建模工具。
三、消息队列1. 消息队列概述消息队列是一种进程间通信的方式,用于在不同组件、服务或进程之间进行异步消息的传递。
它通常采用先进先出(FIFO)的方式来管理消息,能够实现解耦和异步通信的效果。
2. 消息队列的应用消息队列在分布式系统、微服务架构、事件驱动架构等领域得到广泛应用。
通过消息队列,不同的系统组件之间可以实现松耦合的通信,提高系统的可伸缩性和容错性。
四、环形缓冲区1. 环形缓冲区概述环形缓冲区是一种循环队列结构,用于在固定大小的缓冲区中存储和处理数据。
它具有读写指针、循环存储和高效利用内存等特点,常被用于实现数据的缓冲和循环处理。
2. 环形缓冲区的应用环形缓冲区在嵌入式系统、通信系统、存储系统等方面得到广泛应用。
通过环形缓冲区,可以高效地存储和处理连续的数据流,提高数据的处理速度和效率。
五、处理器通讯协议1. 处理器通讯协议概述处理器通讯协议是处理器与外设、存储器、其他处理器等之间进行通讯和数据交换的规范和约定。
它可以包括位置区域总线、数据总线、控制信号等部分,用于确保不同设备之间的数据一致性和正确性。
c语言环形队列算法编写

c语言环形队列算法编写在计算机科学中,队列是一种基本的数据结构,它遵循先进先出(FIFO)的原则。
而环形队列则是队列的一种特殊形式,它的末尾和起点是相连的,形成一个环。
这种数据结构在许多实际应用中都非常有用,例如在操作系统中实现缓冲区,或在网络编程中处理数据包等。
下面,我们将介绍如何使用C语言实现环形队列。
一、环形队列的基本概念环形队列是一个固定大小的数组,它从数组的某个位置开始,直到数组的末尾,然后再回到数组的开始。
当队列满时,新元素将添加到队列的开始位置,形成了一个环形的结构。
二、C语言实现环形队列1.定义数据结构首先,我们需要定义一个结构体来表示队列中的元素。
通常包括一个整数类型的指针,指向队列中的下一个元素,以及一个指向队列大小的变量。
```ctypedefstruct{int*data;intfront;intrear;intsize;}CircularQueue;```2.初始化队列在创建环形队列时,我们需要初始化它的数据指针、队首和队尾指针以及队列大小。
```cvoidinitQueue(CircularQueue*queue){queue->front=0;queue->rear=0;queue->size=0;}```3.入队操作入队操作是将元素添加到队列的末尾。
在环形队列中,我们可以通过移动队尾指针来实现这个操作。
```cvoidenqueue(CircularQueue*queue,intvalue){if(queue->size==queue->size){//队列已满,需要扩展队列大小queue->size*=2;queue->data=realloc(queue->data,queue->size*sizeof(int));}queue->data[queue->rear]=value;queue->rear=(queue->rear+1)%queue->size;queue->size++;}```4.出队操作出队操作是从队列的开头移除一个元素。
stm32串口环形缓冲区开发实例代码

1. 引言在嵌入式开发中,stm32系列是非常常用的微控制器芯片之一。
在实际的项目开发中,串口通信是非常常见的需求,而串口环形缓冲区的开发在串口通信中也扮演着非常重要的角色。
本文将从实际应用的角度出发,介绍如何在stm32中开发串口环形缓冲区,并提供相应的实例代码,帮助读者更好理解和应用该技术。
2. 串口环形缓冲区概述在串口通信中,特别是在高速串口通信中,往往需要处理大量的数据。
而传统的串口接收方式往往会遇到数据丢失、溢出等问题。
为了解决这些问题,通常会采用串口环形缓冲区来缓存数据。
串口环形缓冲区可以很好解决数据处理不及时导致的数据丢失问题,并能够提高数据的处理效率。
3. stm32串口环形缓冲区的开发在stm32中,开发串口环形缓冲区的关键是要理解串口接收中断的机制,并结合环形缓冲区的原理来实现对接收数据的缓存和处理。
以下是一个简单的示例代码,用于说明如何在stm32中实现串口环形缓冲区。
```c#include "stm32f4xx.h"#define BUFFER_SIZE 100uint8_t buffer[BUFFER_SIZE];volatile uint8_t head = 0;volatile uint8_t tail = 0;void USART1_IRQHandler() {if(USART1->SR & USART_SR_RXNE) { buffer[head] = USART1->DR;head = (head + 1) % BUFFER_SIZE; }}int main() {// 初始化串口// ...// 使能串口接收中断USART1->CR1 |= USART_CR1_RXNEIE; NVIC_EnableIRQ(USART1_IRQn);// ...while(1) {if(head != tail) {// 从缓冲区中读取数据并进行处理// ...tail = (tail + 1) % BUFFER_SIZE;}}}```4. 实例代码解析以上示例代码中,我们定义了一个长度为100的缓冲区buffer,并使用head和tail两个指针来分别指向缓冲区的头部和尾部。
串口环形队列和内存分配
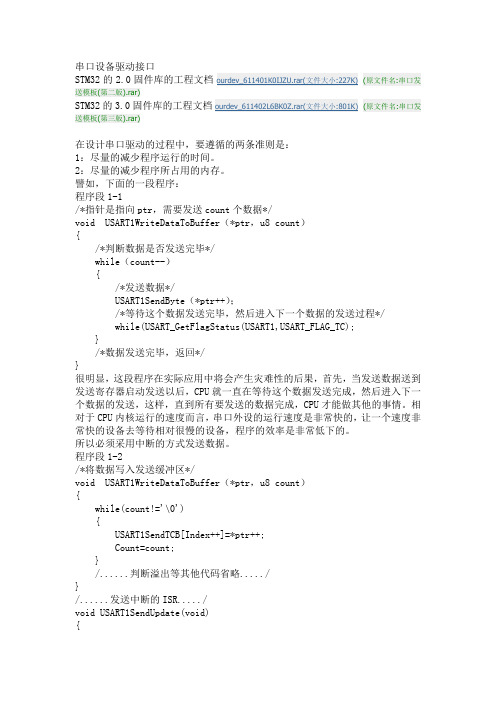
串口设备驱动接口STM32的2.0固件库的工程文档ourdev_611401K0IJZU.rar(文件大小:227K)(原文件名:串口发送模板(第二版).rar)STM32的3.0固件库的工程文档ourdev_611402L6BK0Z.rar(文件大小:801K)(原文件名:串口发送模板(第三版).rar)在设计串口驱动的过程中,要遵循的两条准则是:1:尽量的减少程序运行的时间。
2:尽量的减少程序所占用的内存。
譬如,下面的一段程序:程序段1-1/*指针是指向ptr,需要发送count个数据*/void USART1WriteDataToBuffer(*ptr,u8 count){/*判断数据是否发送完毕*/while(count--){/*发送数据*/USART1SendByte(*ptr++);/*等待这个数据发送完毕,然后进入下一个数据的发送过程*/while(USART_GetFlagStatus(USART1,USART_FLAG_TC);}/*数据发送完毕,返回*/}很明显,这段程序在实际应用中将会产生灾难性的后果,首先,当发送数据送到发送寄存器启动发送以后,CPU就一直在等待这个数据发送完成,然后进入下一个数据的发送,这样,直到所有要发送的数据完成,CPU才能做其他的事情。
相对于CPU内核运行的速度而言,串口外设的运行速度是非常快的,让一个速度非常快的设备去等待相对很慢的设备,程序的效率是非常低下的。
所以必须采用中断的方式发送数据。
程序段1-2/*将数据写入发送缓冲区*/void USART1WriteDataToBuffer(*ptr,u8 count){while(count!='\0') {USART1SendTCB[Index++]=*ptr++;Count=count;}/......判断溢出等其他代码省略...../}/......发送中断的ISR...../void USART1SendUpdate(void){/......判断发送缓冲区中的数据是否发送完毕.....//将发送缓冲区的数据发送出去/USART1SendByte(*ptr++);/......发送指针加一,待发送的字节数减一等代码...../}这样,当调用USART1WriteDataToBuffer函数将待发送的数据写入发送缓冲区以后,CPU就可以执行其他的任务,待一个数据发送完成以后,中断ISR就会触发,在中断服务程序里面将下一个数据写入发送寄存器,启动下一次发送,知道完全发送完毕为止。
环行队列的知识点总结
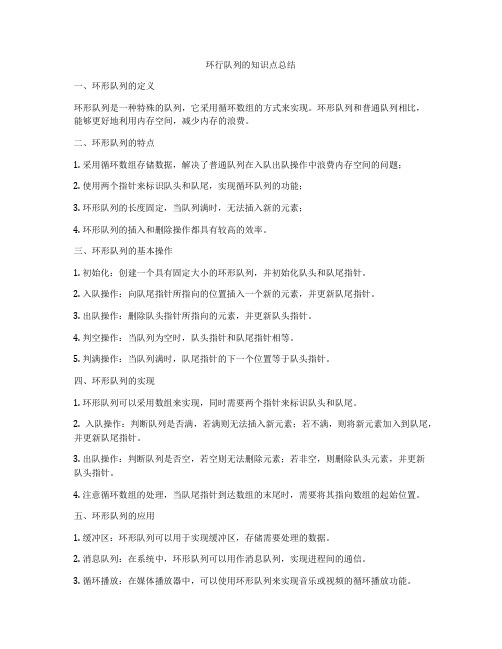
环行队列的知识点总结一、环形队列的定义环形队列是一种特殊的队列,它采用循环数组的方式来实现。
环形队列和普通队列相比,能够更好地利用内存空间,减少内存的浪费。
二、环形队列的特点1. 采用循环数组存储数据,解决了普通队列在入队出队操作中浪费内存空间的问题;2. 使用两个指针来标识队头和队尾,实现循环队列的功能;3. 环形队列的长度固定,当队列满时,无法插入新的元素;4. 环形队列的插入和删除操作都具有较高的效率。
三、环形队列的基本操作1. 初始化:创建一个具有固定大小的环形队列,并初始化队头和队尾指针。
2. 入队操作:向队尾指针所指向的位置插入一个新的元素,并更新队尾指针。
3. 出队操作:删除队头指针所指向的元素,并更新队头指针。
4. 判空操作:当队列为空时,队头指针和队尾指针相等。
5. 判满操作:当队列满时,队尾指针的下一个位置等于队头指针。
四、环形队列的实现1. 环形队列可以采用数组来实现,同时需要两个指针来标识队头和队尾。
2. 入队操作:判断队列是否满,若满则无法插入新元素;若不满,则将新元素加入到队尾,并更新队尾指针。
3. 出队操作:判断队列是否空,若空则无法删除元素;若非空,则删除队头元素,并更新队头指针。
4. 注意循环数组的处理,当队尾指针到达数组的末尾时,需要将其指向数组的起始位置。
五、环形队列的应用1. 缓冲区:环形队列可以用于实现缓冲区,存储需要处理的数据。
2. 消息队列:在系统中,环形队列可以用作消息队列,实现进程间的通信。
3. 循环播放:在媒体播放器中,可以使用环形队列来实现音乐或视频的循环播放功能。
4. CPU调度:操作系统中可以使用环形队列来实现CPU的任务调度。
六、环形队列的优缺点1. 优点:能够更好地利用内存空间,减少内存的浪费;具有较高的效率和性能;2. 缺点:长度固定,无法动态扩展;插入和删除操作需要维护两个指针,实现稍复杂。
七、环形队列的应用场景1. 需要高效的队列数据结构;2. 内存空间有限,需要更好地利用内存;3. 需要循环存储数据的场合。
stm32串口环形缓冲区开发实例代码

stm32串口环形缓冲区开发实例代码【STM32串口环形缓冲区开发实例代码】近年来,随着物联网技术的快速发展,嵌入式系统的需求日益增加。
而在嵌入式系统中,串口通信一直都是一项非常重要的功能。
而在使用串口通信时,我们经常会遇到一个问题,即数据接收和发送的速度不匹配导致数据丢失的情况。
为了解决这个问题,我们可以使用环形缓冲区来进行数据的存储和管理。
本文将以STM32单片机为例,介绍如何开发串口环形缓冲区,并给出相应的实例代码。
一、环形缓冲区的原理环形缓冲区是一种循环队列,它具有固定的大小,并且在填满数据后会自动循环覆盖之前的数据。
这种数据结构可以很好地解决数据接收和发送速度不匹配的问题。
在串口通信中,我们可以将接收到的数据存储到环形缓冲区中,在发送数据时,则可以从环形缓冲区中取出数据进行发送。
二、环形缓冲区的实现在STM32单片机中,我们可以通过使用指针和数组来实现环形缓冲区。
我们需要定义缓冲区的大小,然后创建两个指针,分别指向缓冲区的头部和尾部。
当接收到新的数据时,我们将数据存储到尾部指针所指向的位置,并将尾部指针向后移动一个位置。
当需要取出数据进行发送时,我们则从头部指针所指向的位置取出数据,并将头部指针向后移动一个位置。
需要注意的是,当头部指针和尾部指针相遇时,表示缓冲区已满,此时需要进行循环覆盖操作。
下面是一个基于STM32的串口环形缓冲区的实例代码:```c#include "stm32f4xx.h"#define BUFFER_SIZE 256volatile uint8_t rx_buffer[BUFFER_SIZE];volatile uint8_t tx_buffer[BUFFER_SIZE];volatile uint16_t rx_head = 0, rx_tail = 0;volatile uint16_t tx_head = 0, tx_tail = 0;void USART2_IRQHandler(void){if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) {rx_buffer[rx_head] = USART_ReceiveData(USART2);rx_head = (rx_head + 1) % BUFFER_SIZE;}if(USART_GetITStatus(USART2, USART_IT_TXE) != RESET) {if(tx_head != tx_tail){USART_SendData(USART2, tx_buffer[tx_tail]);tx_tail = (tx_tail + 1) % BUFFER_SIZE;}else{USART_ITConfig(USART2, USART_IT_TXE, DISABLE); }}}void send_data(uint8_t data){tx_buffer[tx_head] = data;tx_head = (tx_head + 1) % BUFFER_SIZE;USART_ITConfig(USART2, USART_IT_TXE, ENABLE);}```在上面的代码中,我们定义了两个缓冲区rx_buffer和tx_buffer,并分别设置了头部指针和尾部指针rx_head、rx_tail和tx_head、tx_tail。
基于STM32芯片环形缓冲区的构建(IAREWARM环境)
基于STM32芯片环形缓冲区的构建(IAREWARM环境)除了通信协议以外,设置数据缓冲区是完善不同速率,或不同系统之间通信的解决方案之一。
本文设置了一个环形缓冲区,来接收PC 上位机通过串口(COM口)发往STM32下位机的数据,具体代码如下://接受数据处理相关定义#define RxSize 16 //接收缓冲区大小u8 RxBuffer[RxSize]; //缓冲区定义u8 RxPut = 0; //接收缓冲区(环形)的当前放人位置u8 RxGet = 0; //接收缓冲区()的当前取出位置u8 RxEff = 0; //接收缓冲区(环形)中的元素总数量//利用去除存入缓冲区数据的冗余信息后,将有用数据存入命令缓存u8 command[7]; //命令缓存,用于存放收到的命令(最长命令为五个字符,其中加上起始符和结尾符,共7个字符)u8 comm_length; //命令长度,命令解码时用//接受缓冲区读取函数u8 Address(u8);void put(u8 z);u8 get(void);void decode(void);//解码程序void get_command(u8 c); //识别命令格式,并存入命令缓冲区//函数实现/************************************************************** *****************环形缓冲区的地址编号计算函数,,如果到达唤醒缓冲区的尾部,将绕回到头部。
环形缓冲区的有效地址编号为:0到 RxSize*************************************************************** ****************///接受缓冲区地址运算u8 Address (u8 i){return (i+1)==RxSize ? 0 : i+1;}//从环形缓冲区中取一个元素u8 get(void){u8 pos;if (RxEff>0){pos = RxGet;RxGet = Address(RxGet); RxEff--;return RxBuffer[pos];}elsereturn '~'; //标志缓冲区中的数据被读完}//向环形缓冲区中放人一个元素void put(u8 z){if (RxEff<RxSize){RxBuffer[RxPut]=z;RxPut = Address(RxPut);RxEff++;}//else//; //若缓冲区为满,则放弃当前数据}//缓冲区的应用/************************************************************** ****************** Function Name : USART1_IRQHandler* Description : This function handles USART1 global interrupt request.* Input : None* Output : None* Return : None*************************************************************** ****************/void USART1_IRQHandler(void) //利用串口中断,来填充缓冲区{if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET)//检查EXTI_Line3线路触发请求发生与否,若发生中断目前将不被执行(即保持原先各种操作){u8 z;z=(u8)( USART_ReceiveData(USART1)& (u8)0xFF);if(z == '%') //单字符命令处理函数 //联机状态软件控制部分{para_send((u8)('%'),0); //同意联机(此处SBUF为发送缓冲器:发送确认信号)while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);//等待发送完成}else // C为除'%',其他字符(多字符命令处理函数)---先将命令存入缓冲区{put(z); //字符送入缓冲区}/* Clear the USART_IT_RXNE pending bit */// USART_ClearITPendingBit(USART1,USART_IT_RXNE); //清除EXTI线路挂起位,标志当前中断已经发生}}在main函数中的while循环中,读取缓冲区数据,并做相关响应main(void){#ifdef DEBUGdebug();#endif/* 调用各外设配置函数,使外设处于工作状态 -----------------------------------*//* 写解调体统核心程序 -----------------------------------*/while(1){c = get(); //读缓冲区get_command(c); //命令解析(数码管显示相应命令,并置stopflag以便于下属语句驱动电机)//根据解析代码实现电机运行相关参数设置if(stopflag==1) //根据解析参数正常运行{curPosition=GoSteps1(steps,direction,curPosition);} //按指定方向,连续运行steps步else if(stopflag==2) //复位代码(向右复位){stepfm=curPosition - Osteps;curPosition=GoSteps1(stepfm,RIGHT,curPosition); }else if(stopflag==3) //复位代码(向左复位){stepfm= Osteps-curPosition ;curPosition=GoSteps1(stepfm,LEFT,curPosition);}else if(stopflag==4) //复位代码(不动){curPosition=GoSteps1(0,RIGHT,curPosition); }else if(stopflag==5) //单步运行{curPosition=GoSteps1(1,direction,curPosition); }}}附录:void get_command(u8 c) //识别命令格式,并存入命令缓冲区command[comm_length]{if(c == '@')//命令字开始{comm_length = 0;}else if(c == '$')//命令字结束{decode();//执行解命令,对stopflag赋值}else if((c >= '0' && c <= '9') || (c >= 'A' && c <= 'Z')) {command[comm_length] = c; //指令字符放入命令缓存comm_length++;}else{//空语句}}【转自:/BLOG_ARTICLE_269940.HTM】。
STM32串口3种工作模式比较[详细讲解]
![STM32串口3种工作模式比较[详细讲解]](https://img.taocdn.com/s3/m/3305b2fd6394dd88d0d233d4b14e852458fb39bd.png)
000STM32 串口3种工作模式比较MCU:stm32f103 系列,串口有3种工作模式:查询、中断、DMA三种工作模式的例程在STM提供的lib里都有,在此目录下:\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Examples\USART00001,查询查询最简单,效率也最低。
0000如要发送一个字节:0000USART_SendData(EVAL_COM1, (uint8_t) ch);0000/* Loop until the end of transmission */while (USART_GetFlagStatus(EVAL_COM1, USART_FLAG_TC) == RESET){}0000一直要等到发送完成后,才能继续,要知道串口的速度很低,MCU的速度很快,简直就是浪费。
0000上面程序可改进为:0000USART1->DR = (u8) ch;0000while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET){}00002, 中断中断效率高,从51年代开始就已经使用,但如果发送/接收大量字节,会产生大量中断,影响整个系统效率。
0000在我的项目中,3个串口都用上,分别接控制台(console)、GSM 模块、汽车OBDII 的KWP (k-line, k线),都不是属于需要大量传输数据的应用,而且在实际使用中,觉得中断会灵活、高效很多,所以这里着重介绍。
00002.1, 串口发送环形队列为了使用方便,定义了一个结构体:struct icar_tx {u8 buf[TX_BUF_SIZE];0000u8 *out_last;u8 *in_last;0000bool empty;};0000当需要发送数据时,只需要往队列里放入数据,in_last指针加1即可,当然会根据in_last, out_last 指针,检查buffer 是否满,满的时候会加1ms延时,大约能发12个字节(以115200 k/b 估算);0000只要empty标志不为真,就打开发送中断,开始发送数据,当然,如果缓冲为空时,会自动关闭发送中断,在中断里,会自动把out_last 加1。
51单片机串口通信环形缓冲区队列(FIFO)

51单片机串口通信环形缓冲区队列(FIFO)51单片机串口通信环形缓冲区队列最近在做毕业设计刚好涉及到51单片机,简单的研究一下发现51单片机串口只有一个字节的缓存,如果遇到单片机串口中断没有及时处理SBUF的值或者串口中断长时间未退出很容易照成数据丢失,于是就自己写了个缓冲区,代价就是消耗一部分内存空间,时间-空间本来就是一对矛盾体,想减少串口通信中数据丢失问题只能牺牲部分空间,来减少数据通信过程中的丢失问题。
1.核心代码如下所示:/**用途:小内存环形缓冲区(FIFO模式)作者:南栀<********************>*/#define BUFFER_MAX 16 //缓冲区大小typedef struct _circle_buffer{unsigned char head_pos; //缓冲区头部位置unsigned char tail_pos; //缓冲区尾部位置unsigned char circle_buffer[BUFFER_MAX]; //缓冲区数组}circle_buffer;circle_buffer buffer;void bufferPop(unsigned char* _buf){if(buffer.head_pos==buffer.tail_pos) //如果头尾接触表示缓冲区为空*_buf=0xFF;else{*_buf=buffer.circle_buffer[buffer.head_pos]; //如果缓冲区非空则取头节点值并偏移头节点if(++buffer.head_pos>=BUFFER_MAX)buffer.head_pos=0;}}void bufferPush(const unsigned char _buf){buffer.circle_buffer[buffer.tail_pos]=_buf; //从尾部追加if(++buffer.tail_pos>=BUFFER_MAX) //尾节点偏移buffer.tail_pos=0; //大于数组最大长度制零形成环形队列if(buffer.tail_pos==buffer.head_pos) //如果尾部节点追到头部节点则修改头节点偏移位置丢弃早期数据if(++buffer.head_pos>=BUFFER_MAX)buffer.head_pos=0;}•1•2•3•4•5•6•7•8•9•10•11•12•13•14•15•16•17•18•19•20•21•22•23•24•25•26•27•28•29•30•31•32•33•34•35•36考虑到看到此博文的人可能有很多小白并不知道如何使用,在此简单的说一下,假设你已经能进行简单的串口发送接收了,然后串口中断部分可以这样写void serial1(void) interrupt 4if(RI){bufferPush(SBUF);RI=0;}if(TI){TI=0;}}•1•2•3•4•5•6•7•8•9•10•11•12在主程序中我们只需要调用函数就行了如:void main(){unsigned char dat ;//读取缓冲区一个字符,如果dat=0xff表示缓冲区为空,所以接收的字符不能有0xff。
嵌入式环形队列和消息队列是如何去实现的?

嵌入式环形队列和消息队列是如何去实现的?嵌入式环形队列和消息队列是实现数据缓存和通信的常见数据结构,广泛应用于嵌入式系统中的通信协议和领域。
环形队列是一种先进先出(FIFO)的数据结构,其中数据被存储在一个环形缓冲区中。
它使用两个指针,分别指向队列的头和尾,以便在读写操作时追踪队列的状态。
当队列满时,新数据将覆盖旧数据,以确保队列的长度保持不变。
环形队列在实现嵌入式通信协议时特别有用,例如UART,CAN等。
消息队列是一种多个发送者和接收者之间共享数据的通信机制。
它允许多个任务或线程向队列发送消息,并允许多个任务或线程从队列中接收消息。
每个消息都有一个固定的大小和格式,并可以根据需要进行排队和检索。
在嵌入式系统中,消息队列广泛用于处理异步事件,例如中断处理和任务之间的通信。
主要应用于:1.网络通信协议(例如TCP/IP,UDP等)中的数据缓存和队列管理。
2.嵌入式操作系统(例如FreeRTOS,uC/OS等)中的任务通信和事件处理。
3.汽车电子领域中的CAN和LIN通信协议。
4.工业自动化领域中的Modbus,Profibus等通信协议。
5.无线通信领域中的蓝牙,Zigbee,LoRa等通信协议。
大致应用1.串口通信中,可以使用环形队列来接收和发送数据。
当接收到新的数据时,将其存储到环形队列中,并在需要发送数据时从队列中取出数据发送。
这种方式可以减少中断处理的时间,提高系统的响应速度。
2.多任务系统中,消息队列用于任务之间的通信。
每个任务都可以向消息队列中发送消息,其他任务可以从队列中获取消息并进行相应的处理。
这种方式可以实现任务之间的解耦,提高系统的可扩展性和可维护性。
3.实时控制系统中,环形队列可以用于缓存传感器数据或控制命令。
当传感器或其他设备向系统发送数据时,可以将其存储到环形队列中,然后由控制任务从队列中获取数据并进行相应的处理。
这种方式可以减少系统对硬件的依赖性,提高系统的灵活性和可靠性。
一种使用环形缓存和环形队列实现UDP高效并发的方法
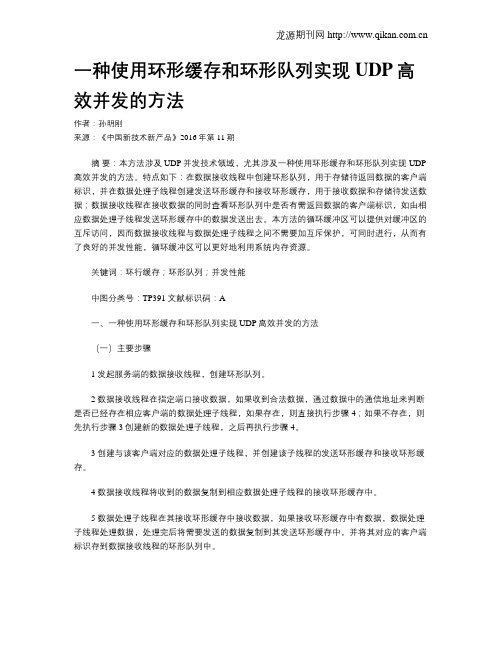
一种使用环形缓存和环形队列实现UDP高效并发的方法作者:孙明刚来源:《中国新技术新产品》2016年第11期摘要:本方法涉及UDP并发技术领域,尤其涉及一种使用环形缓存和环形队列实现UDP 高效并发的方法。
特点如下:在数据接收线程中创建环形队列,用于存储待返回数据的客户端标识,并在数据处理子线程创建发送环形缓存和接收环形缓存,用于接收数据和存储待发送数据;数据接收线程在接收数据的同时查看环形队列中是否有需返回数据的客户端标识,如由相应数据处理子线程发送环形缓存中的数据发送出去。
本方法的循环缓冲区可以提供对缓冲区的互斥访问,因而数据接收线程与数据处理子线程之间不需要加互斥保护,可同时进行,从而有了良好的并发性能,循环缓冲区可以更好地利用系统内存资源。
关键词:环行缓存;环形队列;并发性能中图分类号:TP391 文献标识码:A一、一种使用环形缓存和环形队列实现UDP高效并发的方法(一)主要步骤1 发起服务端的数据接收线程,创建环形队列。
2 数据接收线程在指定端口接收数据,如果收到合法数据,通过数据中的通信地址来判断是否已经存在相应客户端的数据处理子线程,如果存在,则直接执行步骤4;如果不存在,则先执行步骤3创建新的数据处理子线程,之后再执行步骤4。
3 创建与该客户端对应的数据处理子线程,并创建该子线程的发送环形缓存和接收环形缓存。
4 数据接收线程将收到的数据复制到相应数据处理子线程的接收环形缓存中。
5 数据处理子线程在其接收环形缓存中接收数据,如果接收环形缓存中有数据,数据处理子线程处理数据,处理完后将需要发送的数据复制到其发送环形缓存中,并将其对应的客户端标识存到数据接收线程的环形队列中。
6 数据接收线程在接收数据的同时,查看环形队列中是否有需返回数据的客户端标识,如有则将该标识出队列,由该标识索引到相应客户端的数据处理子线程,并将该数据处理子线程发送环形缓存中的数据发送出去。
(二)主要特征其主要特征在于执行步骤1前需要先为数据接收线程创建套接字并绑定一端口。
c语言数据结构(环形队列)

c语言数据结构(环形队列)环形队列是一种经典的数据结构,它在很多场景中发挥着重要的作用。
本文将介绍C语言中的环形队列的原理、实现及其在实际应用中的一些注意事项。
1.环形队列的原理环形队列是一种特殊的队列,它的底层数据结构是一个数组。
与普通队列不同的是,当队列的尾指针指向数组的最后一个位置时,如果还需要继续插入元素,尾指针则跳转到数组的第一个位置。
这样就形成了一个环形的结构,可以循环利用数组中的空间。
2.环形队列的实现环形队列的实现主要涉及到以下几个要素:-队列的初始化:需要给队列分配一块固定大小的内存空间,并初始化队列的头指针和尾指针。
-入队操作:将元素插入到队列的尾部,并更新尾指针的位置。
-出队操作:将队列头部的元素移除,并更新头指针的位置。
-判空操作:判断队列是否为空,即头指针和尾指针是否相等。
-判满操作:判断队列是否已满,即尾指针的下一个位置是否等于头指针。
以下是一个基于数组的环形队列的简单实现:```c#define MAX_SIZE 100typedef structint data[MAX_SIZE];int front; // 头指针int rear; // 尾指针} CircularQueue;void initQueue(CircularQueue *queue)queue->front = 0;queue->rear = 0;void enqueue(CircularQueue *queue, int element)if ((queue->rear + 1) % MAX_SIZE == queue->front) printf("Queue is full.\n");return;}queue->data[queue->rear] = element;queue->rear = (queue->rear + 1) % MAX_SIZE;int dequeue(CircularQueue *queue)if (queue->front == queue->rear)printf("Queue is empty.\n");return -1;}int element = queue->data[queue->front];queue->front = (queue->front + 1) % MAX_SIZE;return element;int isEmpty(CircularQueue *queue)return queue->front == queue->rear;int isFull(CircularQueue *queue)return (queue->rear + 1) % MAX_SIZE == queue->front;```3.环形队列的应用注意事项在使用环形队列时,需要注意以下几点:-队列的大小是有限制的,如果插入元素的速度过快,可能会导致队列溢出。
环形队列 用法
环形队列用法环形队列是一种特殊的队列数据结构,它与普通队列的不同之处在于,当队列的尾部指针已经达到数组的末尾时,还可以继续循环到数组的开头,使得队列可以在有限的存储空间中实现无限的循环。
使用环形队列可以最大限度地利用存储空间,避免了出现溢出的情况。
环形队列的用法主要包括以下几个方面:1. 初始化环形队列:创建一个固定大小的数组作为环形队列的底层数据结构,并初始化队列的头部和尾部指针。
2. 入队操作:将一个元素添加到队列的尾部,并更新尾指针。
当队列已满时,无法继续添加元素。
3. 出队操作:从队列的头部删除一个元素,并更新头指针。
当队列为空时,无法进行出队操作。
4. 判空操作:检查队列是否为空,即头指针是否等于尾指针。
5. 判满操作:检查队列是否已满,即尾指针达到数组末尾时下一个位置是否为头指针。
6. 获取队列长度:计算队列中元素的个数,即尾指针减去头指针的绝对值,再加上1。
7. 清空队列:将头指针和尾指针重置为初始状态。
通过以上的操作,可以实现对环形队列的基本管理和利用。
示例代码(使用Python语言):```pythonclass CircularQueue:def __init__(self, capacity):self.capacity = capacityself.queue = [None] * capacityself.head = 0self.tail = 0def enqueue(self, item):if self.is_full():raise Exception("Queue is full")self.queue[self.tail] = itemself.tail = (self.tail + 1) % self.capacitydef dequeue(self):if self.is_empty():raise Exception("Queue is empty")item = self.queue[self.head]self.head = (self.head + 1) % self.capacityreturn itemdef is_empty(self):return self.head == self.taildef is_full(self):return (self.tail + 1) % self.capacity == self.headdef get_length(self):return (self.tail - self.head + self.capacity) % self.capacitydef clear(self):self.head = 0self.tail = 0self.queue = [None] * self.capacity```以上是一个简单的环形队列的实现,包括了入队、出队、判空、判满、获取队列长度和清空队列等操作。
环形队列的工作原理
环形队列的工作原理嘿,朋友!你有没有想过一种超级有趣又超级实用的数据结构呀?今天我就想和你唠唠环形队列。
环形队列就像是一个特别的环形跑道,不过在这个跑道上跑的不是运动员,而是数据。
想象一下,你有一群小伙伴,他们要按照顺序做一件事情,但是场地有限,不能无限制地排很长的队伍,这个环形队列就像是这个特殊的场地。
我们先来说说环形队列的基本组成部分吧。
它有一个数组,这个数组就好比是那个环形跑道的轮廓。
数组有固定的大小,这就像是跑道的长度是固定的一样。
然后呢,还有两个指针,这两个指针可太重要了,就像是跑道上的两个小指挥。
一个指针叫头指针,它指向队列的头部,就像站在跑道起点指挥的人,告诉大家从这儿开始。
另一个指针是尾指针,它指向队列的尾部,就像在跑道最后面确认大家都跑到哪儿的人。
那这个环形队列是怎么工作的呢?当我们要往队列里添加数据的时候,就像是小伙伴们要进入这个特殊的场地。
尾指针就开始发挥作用了。
它会找到下一个可以存放数据的位置,然后把数据放进去。
这就好像是小伙伴们按照顺序站在跑道上一样。
如果尾指针走到了数组的末尾,嘿,这时候神奇的事情发生了,它不会就停在那儿,而是像在环形跑道上一样,又回到数组的开头继续找位置。
这多酷啊!再说说取出数据呢。
这时候头指针就上场了。
它会指向要取出的数据的位置,然后把数据取出来。
取完之后,头指针也会像尾指针一样,如果到了数组的末尾,就又回到开头。
这就好比小伙伴们完成了任务,从起点离开,下一个小伙伴又从新的起点开始自己的任务。
我给你举个小例子吧。
假设有个环形队列用来处理顾客的订单。
这个环形队列的数组大小是10。
有个店员小李,他负责把新的订单放进队列,这就相当于尾指针的操作。
另一个店员小张,他负责处理订单,这就是头指针的操作。
一开始,队列是空的,小李接到了3个订单,他就把这3个订单依次放进队列,尾指针也跟着往后移动。
这时候小张开始处理订单,他从队列头部取订单,每取一个订单,头指针就移动一下。
圆形队列圆形缓冲区循环缓冲区
圆形队列圆形缓冲区循环缓冲区圆形缓冲区(circular buffer),也称作圆形队列(circular queue),循环缓冲区(cyclic buffer),环形缓冲区(ring buffer),是⼀种⽤于表⽰⼀个固定尺⼨、头尾相连的的数据结构,适合缓存。
⽤法圆形缓冲区的⼀个有⽤特性是:当⼀个数据元素被⽤掉后,其余数据元素不需要移动其存储位置。
相反,⼀个⾮圆形缓冲区(例如⼀个普通的队列)在⽤掉⼀个数据元素后,其余数据元素需要向前搬移。
换句话说,圆形缓冲区适合实现缓冲区,⽽⾮圆形缓冲区适合缓冲区。
圆形缓冲区适合于事先明确了缓冲区的最⼤容量的情形。
扩展⼀个圆形缓冲区的容量,需要搬移其中的数据。
因此⼀个缓冲区如果需要经常调整其容量,⽤链表实现更为合适。
写操作覆盖圆形缓冲区中未被处理的数据在某些情况下是允许的。
特别是在多媒体处理时。
例如,⾳频的⽣产者可以覆盖掉尚未来得及处理的⾳频数据。
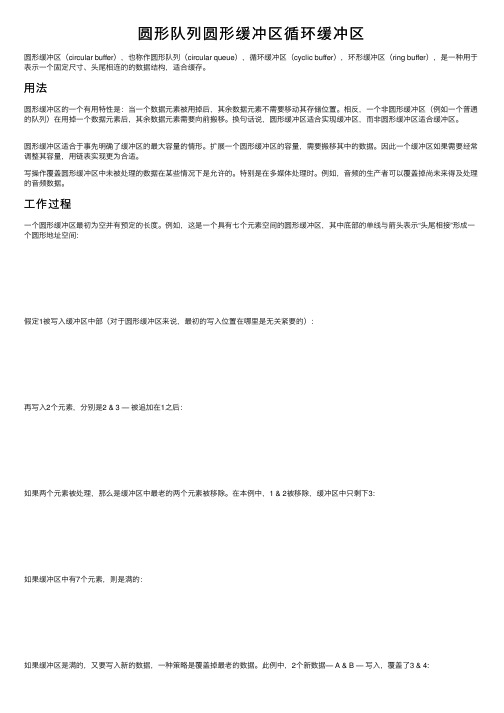
⼯作过程⼀个圆形缓冲区最初为空并有预定的长度。
例如,这是⼀个具有七个元素空间的圆形缓冲区,其中底部的单线与箭头表⽰“头尾相接”形成⼀个圆形地址空间:假定1被写⼊缓冲区中部(对于圆形缓冲区来说,最初的写⼊位置在哪⾥是⽆关紧要的):再写⼊2个元素,分别是2 & 3 — 被追加在1之后:如果两个元素被处理,那么是缓冲区中最⽼的两个元素被移除。
在本例中,1 & 2被移除,缓冲区中只剩下3:如果缓冲区中有7个元素,则是满的:如果缓冲区是满的,⼜要写⼊新的数据,⼀种策略是覆盖掉最⽼的数据。
此例中,2个新数据— A & B — 写⼊,覆盖了3 & 4:也可以采取其他策略,禁⽌覆盖缓冲区的数据,采取返回⼀个错误码或者抛出。
最终,如果从缓冲区中移除2个数据,不是3 & 4 ⽽是 5 & 6 。
因为 A & B 已经覆盖了3 & 4:圆形缓冲区⼯作机制由于计算机内存是线性地址空间,因此圆形缓冲区需要特别的设计才可以从逻辑上实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
队列的介绍和利用环形队列实现STM32进阶之串口环形缓冲区的概述队列的概念
在此之前,我们来回顾一下队列的基本概念:队列(Queue):是一种先进先出(First In First Out ,简称FIFO)的线性表,只允许在一端插入(入队),在另一端进行删除(出队)。
队列的特点
类似售票排队窗口,先到的人看到能先买到票,然后先走,后来的人只能后买到票
队列的常见两种形式
普通队列
在计算机中,每个信息都是存储在存储单元中的,比喻一下吧,上图的一些小正方形格子就是一个个存储单元,你可以理解为常见的数组,存放我们一个个的信息。
当有大量数据的时候,我们不能存储所有的数据,那么计算机处理数据的时候,只能先处理先来的,那么处理完后呢,就会把数据释放掉,再处理下一个。
那么,已经处理的数据的内存就会被浪费掉。
因为后来的数据只能往后排队,如过要将剩余的数据都往前移动一次,那么效率就会低下了,肯定不现实,所以,环形队列就出现了。
环形队列
它的队列就是一个环,它避免了普通队列的缺点,就是有点难理解而已,其实它就是一个队列,一样有队列头,队列尾,一样是先进先出(FIFO)。
我们采用顺时针的方式来对队列进行排序。
队列头 (Head) :允许进行删除的一端称为队首。
队列尾 (Tail) :允许进行插入的一端称为队尾。
环形队列的实现:在计算机中,也是没有环形的内存的,只不过是我们将顺序的内存处理。