LOCK ON 苏27空战操作控制
lock_on简易手册

LOCK ON 简易手册飞行控制:↑ :飞机拉起↓ :飞机压低← :向左翻滚→ :向右翻滚Z:左舵(空中),左转(地面)X:右舵(空中),右转(地面)A:自动驾驶H:打开/取消高度固定J:打开/取消速度固定Shift+N:重置语音警报K:解除仰角抑制(执行“眼镜蛇”机动)U:在航母上进入起飞位置Ctrl+. :向上配平Ctrl+; :向下配平Ctrl+, :向左配平Ctrl+/ :向右配平Ctrl+T:取消配平Ctrl+Z:左舵配平Ctrl+X:右舵配平机械系统控制:B:打开/关闭减速板F:打开/关闭襟翼G:打开/关闭起落架E: 打开/关闭电子干扰P:释放阻力伞W:机轮刹车(保持键)T:拉烟开关R:受油管伸缩开关L:仪表照明开关Ctrl+L:机身信号灯开关Alt+L:起落架灯--近光/远光/关闭Ctrl+EEE:弹射跳伞Ctrl+C:座舱盖开关Ctrl+G:打开/关闭尾勾(仅限SU33)Ctrl+P:机翼折叠开关(仅限SU33)Ctrl+R:空中释放燃油/地面加油(保持键)Alt+R:抛弃副油箱Ctrl+H:改变HUD颜色引擎控制:Page up:发动引擎/快速增加推力Page Down:关闭引擎/快速减小推力With Alt:ALT组合单纯控制左引擎With Shift:SHIFT组合单纯控制右引擎导航模式:~ :选择下一导航点或机场1 :导航模式Alt+C:重置飞行时钟作战模式:2 :超视距空战模式3 :近距空战——垂直扫描模式4 :近距空战——孔径模式5 :近距空战——头盔模式6 :径向瞄准模式7 :空对地模式8 :目视投弹模式~ :目标循环切换Tab:锁定所选目标或目标点(打开目标跟踪)Ctrl+Tab:关闭目标跟踪武器系统:D:武器选择C:机炮选择Q:释放干扰弹(单发释放)Shift+Q:释放干扰弹(连续释放)Enter:发射导弹Spacebar:发射机炮Ctrl+W:成对抛弃武器(空中),重新装填武器(地面)Ctrl+V:齐射模式开关Shift+C:改变机炮射速(A10)Shift+V:减小投弹间距(A10)Ctrl+Space:改变投弹数量(A10)Alt+Space:选择首选武器(A10)Shift+Space:单个/成对投弹模式切换(A10)雷达光电系统:I:雷达开关Alt+I:RWS/TWS(目标跟踪)雷达模式切换(仅限于F-15)O:俄战斗机:打开/关闭光电扫描仪俄攻击机:打开/关闭激光测距仪美攻击机:打开/关闭CCRP投弹模式Ctrl+I:所有扫描仪器归中- :扩大MFD显示范围+ :减小MFD显示范围Ctrl++ :增大F15雷达天线方位角Ctrl+- :减小F15雷达天线方位角空对空模式:Shift+; :向上移动雷达/光电扫描区Shift+, :向左移动雷达/光电扫描区Shift+. :向下移动雷达/光电扫描区Shift+/ :向右移动雷达/光电扫描区空对地模式:Shift+; :雷达/电视制导探头上移Shift+, :雷达/电视制导探头左移Shift+. :雷达/电视制导探头下移Shift+/ :雷达/电视制导探头右移视角选择:F1:座舱视角F2:外部视角F3:飞越视角F4:后视视角Ctrl+F4:追尾视角F5:空战视角F6:武器视角F7:活动的地面物体视角F8:目标视角F9:舰船视角F10:地图视角F11:塔台及地表视角F12:静态物体视角座舱视角控制:Key Pad 1:视角向左下移动Key Pad 2:视角向下移动Key Pad 3:视角向右下移动Key Pad 4:视角向左移动Key Pad 5:视角归中Key Pad 6:视角向右移动Key Pad 7:视角向左上移动Key Pad 8:视角向上移动Key Pad 9:视角向右上移动Key Pad 0:仪表盘视角切换(保持键)Key Pad 1+5:HUD视角Key Pad * :向前移动视点Key Pad / :向后移动视点Key Pad Del:目视锁定Key Pad NumLock:取消目视锁定M:右后视镜视角N:左后视镜视角程序控制:Esc:退出任务/录相Ctrl+Q:在播放录相时控制飞机Alt+J:取得/放弃所选飞机控制权Ctrl+A:加快游戏速度(快镜头)Alt+A:减慢游戏速度(慢镜头)Shift+A:恢复正常游戏速度S:任务开始/暂停/继续。
LOCK ON键盘 界面 技术操作指南
LOCK ON键盘,界面,技术操作指南转自飞行者俱乐部论坛LOCKON中文训练手册系列~~~~~~~~~~~~~~~~~~~~~~~~~Lock On中文键盘指令修正版(新)和其他操作方法Lock On正式版中文键盘操作指令修正版(WORD格式)改正了两处:Shift-R 改变雷达告警系统模式(A-10)6 选择导弹纵向瞄准模式/导弹搜索头UNCAGE/AIM-7FLOOD模式请至3GOFTP下载(感谢:Eagle566同志提供)~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~`所有内容译自LOCKON网上单独销售的增强说明手册中的训练手册部分,很报歉没有按顺序译,图片将包含在最后完整的PDF文档中...欢迎批评指正!!F-15C空中加油训练欢迎你参加F-15C战机的空中加油训练。
在这次训练中,你将要学习怎样与波音KC-10A空中加油机通讯以及如何钩住加油桁杆完成加油。
对于F-15战机飞行员而言,这是最困难的任务之一。
KC-10A是DC-10的重装改进型,可以被认为是飞行的油箱。
KC-10有一根向机尾方向伸出的硬性加油桁杆,而F-15C和A-10A则拥有可插入式的受油管。
硬性加油杆可以被人工操纵插入受油管。
F-15C的可插入式受油管位于左翼根,A-10A的可插入式受油管位于机首处。
你可以从AWACS获得F-15C的位置,当接近F-15C加油机时,加油机将提供你方位指示。
连接KC-10A的输油杆1. 按“\”键,然后依次按“F5”和“F3”键从AWACS处获得加油机的位置。
2. 激活RWS模式和雷达,找到并锁定加油机,获得它的距离、高度和速度。
3. 操纵战机飞到加油机后方2英里内,高度与加油机保持相同。
4. 按“R”键伸出受油管。
5. 按“1”键切换到导航模式。
一旦距离加油机1英里以内时,HUD将会切换到加油模式,同时在HUD的NAV区域出现相应指示。
这时KC-10A也会伸出硬性的加油桁杆。
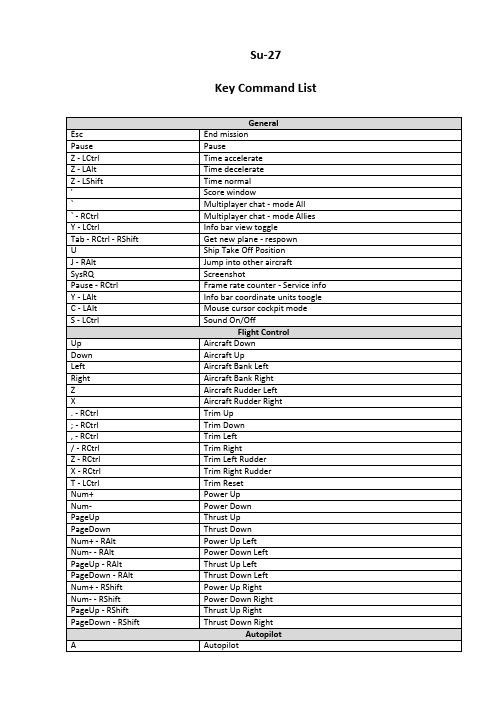
LOCK ON2 键位表

H打开/取消高度固定
RCtrl+X右舵配平
J打开/取消自动油门
A打开/取消自动驾驶(导航中沿航线飞,作战时自动水平)
RShift+Home启动飞机引擎
PageUp快速增加引擎推力
LAlt+`自动飞行模式-任意模式
PageDown快速减小引擎推力
LAlt+1自动飞行模式-保持高度
RShift+End关闭飞机引擎
LAlt+2自动飞行模式-保持高度和翻滚姿态
KeyPad+缓慢增加引擎推力
LAlt+3自动飞行模式-从任意飞行姿态转变为水平飞行
KeyPad-缓慢减小引擎推力
LAlt+4自动飞行模式-保持气压高度
LAlt+9取消自动飞行模式
LAlt+5自动飞行模式-保持雷达高度
LAlt+6自动飞行模式-“自动导航”模式,类似“全自动飞行”但取消油门保持
RAlt+.增加RWR/SPO
8 (SETKA)目视瞄准模式(F15没有)
RAlt+,减小RWR/SPO
RShift+=增加空中数据系统气压高度(仅用于Su-25/ 25T)
RShift+R RWR/SPO威胁告警模式切换
LShift+E红外电子干扰器开关(Su-25T专有)
E雷达电子干扰器开关
LShift+Q自动释放干扰弹(连续释放)
LCtrl+F襟翼完全收起(不管有几级)
LShift+B打开减速板
LShift+F襟翼完全开启(不管有几级)
LShift+G放下起落架
lock on操作
LOCK ON 简易手册飞行控制:↑:飞机拉起↓:飞机压低←:向左翻滚→:向右翻滚Z:左舵(空中),左转(地面) X:右舵(空中),右转(地面) A:自动驾驶H:打开/取消高度固定 J:打开/取消速度固定Shift+N:重置语音警报K:解除仰角抑制(执行“眼镜蛇”机动) U:在航母上进入起飞位置 Ctrl+. :向上配平 Ctrl+; :向下配平 Ctrl+, :向左配平 Ctrl+/ :向右配平 Ctrl+T:取消配平 Ctrl+Z:左舵配平 Ctrl+X:右舵配平机械系统控制: B:打开/关闭减速板 F:打开/关闭襟翼 G:打开/关闭起落架 E: 打开/关闭电子干扰 P:释放阻力伞W:机轮刹车(保持键) T:拉烟开关R:受油管伸缩开关 L:仪表照明开关Ctrl+L:机身信号灯开关Alt+L:起落架灯--近光/远光/关闭 Ctrl+EEE:弹射跳伞 Ctrl+C:座舱盖开关Ctrl+G:打开/关闭尾勾(仅限SU33) Ctrl+P:机翼折叠开关(仅限SU33)Ctrl+R:空中释放燃油/地面加油(保持键)Alt+R:抛弃副油箱Ctrl+H:改变HUD颜色引擎控制:Page up:发动引擎/快速增加推力 Page Down:关闭引擎/快速减小推力 With Alt:ALT组合单纯控制左引擎 With Shift:SHIFT组合单纯控制右引擎导航模式:~ :选择下一导航点或机场 1 :导航模式 Alt+C:重置飞行时钟作战模式:2 :超视距空战模式3 :近距空战——垂直扫描模式4 :近距空战——孔径模式5 :近距空战——头盔模式6 :径向瞄准模式7 :空对地模式8 :目视投弹模式 ~ :目标循环切换Tab:锁定所选目标或目标点(打开目标跟踪) Ctrl+Tab:关闭目标跟踪武器系统: D:武器选择C:机炮选择Q:释放干扰弹(单发释放) Shift+Q:释放干扰弹(连续释放) Enter:发射导弹Spacebar:发射机炮Ctrl+W:成对抛弃武器(空中),重新装填武器(地面)Ctrl+V:齐射模式开关Shift+C:改变机炮射速(A10) Shift+V:减小投弹间距(A10) Ctrl+Space:改变投弹数量(A10)Alt+Space:选择首选武器(A10)Shift+Space:单个/成对投弹模式切换(A10)雷达光电系统:I:雷达开关Alt+I:RWS/TWS(目标跟踪)雷达模式切换(仅限于F-15)O:俄战斗机:打开/关闭光电扫描仪俄攻击机:打开/关闭激光测距仪美攻击机:打开/关闭CCRP投弹模式 Ctrl+I:所有扫描仪器归中 - :扩大MFD显示范围 + :减小MFD显示范围Ctrl++ :增大F15雷达天线方位角 Ctrl+- :减小F15雷达天线方位角空对空模式:Shift+; :向上移动雷达/光电扫描区 Shift+, :向左移动雷达/光电扫描区 Shift+. :向下移动雷达/光电扫描区 Shift+/ :向右移动雷达/光电扫描区空对地模式:Shift+; :雷达/电视制导探头上移 Shift+, :雷达/电视制导探头左移Shift+. :雷达/电视制导探头下移 Shift+/ :雷达/电视制导探头右移视角选择: F1:座舱视角 F2:外部视角 F3:飞越视角 F4:后视视角Ctrl+F4:追尾视角 F5:空战视角F6:武器视角F7:活动的地面物体视角F8:目标视角 F9:舰船视角 F10:地图视角F11:塔台及地表视角 F12:静态物体视角座舱视角控制:Key Pad 1:视角向左下移动 Key Pad 2:视角向下移动 Key Pad 3:视角向右下移动 Key Pad 4:视角向左移动 Key Pad 5:视角归中 Key Pad 6:视角向右移动 Key Pad 7:视角向左上移动 Key Pad 8:视角向上移动 Key Pad 9:视角向右上移动Key Pad 0:仪表盘视角切换(保持键)Key Pad 1+5:HUD视角 Key Pad * :向前移动视点 Key Pad / :向后移动视点 Key Pad Del:目视锁定Key Pad NumLock:取消目视锁定 M:右后视镜视角 N:左后视镜视角程序控制:Esc:退出任务/录相Ctrl+Q:在播放录相时控制飞机 Alt+J:取得/放弃所选飞机控制权 Ctrl+A:加快游戏速度(快镜头) Alt+A:减慢游戏速度(慢镜头) Shift+A:恢复正常游戏速度 S:任务开始/暂停/继续。
苏—27飞机火控系统特点及可借鉴技术

苏—27飞机火控系统特点及可借鉴技术8电光与控制1992年第2期(总第46期)苏27飞机火控系统特点及可借鉴技术夏英明√7f一/动布局.装2台AⅡ一3lo加力涡轮风扇发动机,配各了单啻转膛ruI 一30—1航炮,翼身下有十个挂点.装挂P一27P1中距雷达导弹,P一739与P--60MK红外格斗导弹;还可挂80,120,260毫米的航空火箭弹及l2种航弹.cY一27还采用了气泡式座舱盖及风挡.风挡下虽有光一电雷达,仍有14?的下视界.它的许多新构思,形成了苏联80年代的武器火控系统.1cY一27武器火控系统特点1.IcY一27武器装备是以空空中,近距导弹为主①P一27Pl是惯性加半主动制导的中距拦射导弹.它由机上雷达发出时分制编码,进行制导致据传送,并可两枚弹同时攻击一个目标,射程达55km,重达250kg的雷达制导弹.P_2l与雷达和制导信息系统及武器管理系统紧密相关,形成一个完整的空空导弹武器系统.②P739有宽框架角,液氮致冷的红外导引头.它具有五个控制通道(除常规两舵及副翼外,另加2路燃气偏流舵)使其具有逸高约60g的机动能力.其重(105ka)及口径(o一170)与PL一8相近,但其机动能力及框架角都比PL一8大.@后半球攻击用的P--60MK红外导弹,性能与P卜5相近,但比PL 一5小而轻,射程也近一些.它还可用来攻击小型地面红外辐射目标.1.2cY一27能大量外挂常规武器rul一30炮比23威力犬.cY一27十个挂点配有8个火箭,炸弹发控盒,大量挂装了攻击性武器.①所有特种炸弹均为500kg级.250kg级还可以用复式挂槊挂6枚.cY 一27可载:反跑道炸弹,云爆弹,燃烧子母弹,杀伤子母弹及反装甲子母等多个型号.装备量达4~6吨,使c一27可作为对地攻击机使用.②采用大口径火箭弹,如20发c一80火箭筒,5发5c—l3T火箭筒及单笈c一250~M航空火箭,能压制重型防空目标及装甲目标.1992年第2期(总第’6期)苏--27飞机业控系统特点及可借鉴技术9 l_3cY一27火控系统是由四大部分组成①组合目标信息传感系统:它由脉冲多h勒雷达,光一电探测系统(古红外跟踪器与激光测距器)-q头盔瞄准系统组成.三个传感系统利用总线相交连,在使用上相互弥补,形成对远,近目标实施观察,截获,跟踪并互相联动,输出目标数据.但本目标探测系统是以100km作用距离的PD雷达为主导,60km范围内有红外跟踪器作为抗干扰补充,可用红外跟踪器发射红外弹.近战耐,则以头盔带动雷达及红外跟踪系统和红外导引头,进行30视场内的目标捕获.②为了火控计算与显示,提供本机参数是依靠ⅡHK一10驾驶导航分系统.它集惯导,大气机及近,近程无线电领航设备为一系统,并与飞机自动驾驶和操纵系统相联,形成一个自动航行系统.其使用总线向传感分系统及显示系统提供惯导大气等本机参数及远程导航,效传引导及辅助无线电领航显示数据.③cY一27飞机主要人机接口是以平显(苏方称为综合显示器)及雷达显示器(苏方称为直观显示器)组成的统一显示系统.它们共有四种航行显示格式及六种攻击显示格式.但其显示画面与我国规范相距甚远,尚需进一步研究.④cYO一27武器控制系统管理着十个挂架上的武器和外挂,以及控制导弹的发射和机炮的射击.它有2个导弹控制盒,8个火箭,炸弹控制盒.座舱内使用灯光信号与控制板进行操作.起落架舱内还有地面装备装入板.其管理的武器量是少见的.1.4cY一27武器火控系统有综合使用,自动化攻击蔑新技术初步采用的特色①cY一27按照作战飞行剖面,划分其操作过程t1)在其起飞之后,就以自动大圆航路领航.它可有8.个航路点输入,并可以按瑗定航向进入攻击范围.I)局部实施截获,操纵,瞄准,发射和选用武器的自动化功能.实现初步方式的自动比攻击.I)攻击后返航,距机场200km后改为近程导航,可预定3个着陆机场数据,可自动使飞机进入高度600m及跑道端22kin处的转弯位置,实施自动着陆.②充分和J用火控系统与驾驶导航系统的交联,实现局部自动攻击I)自动截获若在空出现R<R时,雷达可在3秒内自动捕获最近的目标,并带动红外跟踪器跟踪.I)自动瞄准操作t将火控系统的瞄准信号变成飞行驾驶信号,经飞行控制系统完成预计的瞄准航向的截击,以及预定的再次攻击.并按轰炸航路(每30’一挡)进入方向瞄准.I)自动发射:对P一739红外导弹,则采取目标在其发射包线内时,只要是压下射击按钮的状态,即可自动发射.17)自动选取武器t如在使用红外跟踪器时.则可自动选用P一739导弹.另外,还傲靠武器管理系统进行内六个挂架的自动切换.③采用了武器系统”握扦控制”,进行了武器,传感器的截获等的转换.I)在驾驶杆上远/近开关确定使用中距拦射/近距格斗弹.并与油门把上按钮配合,循环选定内六挂架的武器切换.10苏一27飞机火控系统特点及可借鉴技术1992年第2期(簿第46期)I)驾驶杆上”球摸开关,能使目标标定定垃,并与油门把”截获按钮相配台,形成雷达或红外跟踪器的截获.--i-①采取合成语啻,在平显上显示?发射(11r)的同时进行语音”可以发射”的提醒,这比音响信母进一步..⑤cY一27火控对地攻击不很强,但可在键入目标数据后自动导航轰炸,也能手动(人工j目祝水平.俯冲及上仰攻击.其轰炸时主要靠惯导与无线电高度表解箅.又能使用太口径火箭政击地面雷达机库,登陆艇等坚固目标.还采用P一6卟Ⅸ打击地面小型红外辐射目标.这些动向都值得注意.:@辅炮虽有一定系伤力,已退到次要位置,它在空中使用只显示0~800m的范围.2可借鉴的主要技术①将n雷造缸外跟踪器和头盔瞄准系统三位组合,相互随动,提高了抗干扰能力,增添T观测目标妁手段.:多目标传感器是火控系统的一个发展方向.在海湾战争中美军则以Lantirn吊舱方式增加多个传感器.cY一27只是同于F一4,F—J4方式.增添红外空空跟踪器无论怎样,我国必须研究光_电霉达,作为探测截获跟踪l及攻击中PD雷达不可少的多元探测设备.对cY一27三者传感器的相互数据综合使用值得我们参考.②失控臻统与导航驾驶系统相交联,形成部分自动攻击的功能,是值得我们重视的.美国研制的IFFC是在电传操纵与主动控制技术的基础上实旄的.而cY一27则利用现有.自动驾驶导航系统的特性,取得了火控结果实现局部的.特别是在拦截与对地攻击中的自动瞄准操纵.是一种创新.为IFFC的简化方式这种方式与我所在IFFC研制中结果相似.③_P一27P1是一个持定的雷达制导导弹.它可利用指令方式进行全程制导}它的主动导引头还可在18km内截获目标.其特定的时分制式调频制导码的形成与传输,导弹要求的射频与电气接口如何保证.接收指令后进行半主动制导的规律都是我们很感兴趣的.其机上控制显示方式也是我们必须深入了僻的①其武器外挂的控制操作较为合理.地勤人员可在起落架舱内装上十个挂架上的武器与外挂.飞行员只在座舱内观察灯光指示与操作控制开关.它比其它国家研制的外挂管理系统更为简洁,方便.总之.cY一27武器火控系统是一个完整的,具有一定程度的综合系统.必须从系统观点出发,发挥各种分系统与设备的优势,达到独立作战之目的.1992年第2期(总第6期)龟光与控制两种串行数据传输总线接口器件的工作原理及应用陈鼎新【摘要】表文对串十亍数据传输总践接口器件HS--3;8.~和HS--3282的工作原理进行了详细论逮.杖芯片高度粜中如完最ARINC429--{l敷字传冀总线两路独立地接收器和一路发莲零.既漓足ARINC429埋范.又{亩小了体积.战,,聃托,提高了可靠性.将它用干串扦数据传辅总线中.代替由÷小规槿电路南成的l盥逆譬,接收喜,将差十分有州的.【关键词】数据总线,接器蚌一前言ARINC429--4数字传输总线(航空部HB6096(SZ01数字信息传输系统》)在××飞机的导航,火控系统中被广泛应用.但各设备制造厂(所)研制的数字传输总线发送器,接收器.都是由中小规模电路组合而成..所占体积大,功耗大.如平显火控系统电子组件中,数据传输总线发送器,接收器占用一块220×180~的六层插件板(其中含一路发送器.三路接收器)使用中小规模电路近80块,+5伏电源功耗近2安培.如果采甩总线接口线性驱动线路Hs一3182和总线接口线路Hs一3282完成上述同样的功能过压保护I-数据A”和数据B”是与时钟和同步信号相与军用温度范围.1.2方块图Hs一3182线性驱动器方块图如图l所示.l2两种串行数据传输总线接IZl器件wr作原理及应用1992年第2期(总第46期)圈1Hs-$182线性驱动器方块圈1.3Hs一3182工作原理Hs一3182芯片最好和}培一3282芯片联合使用.因为Hs一3l82的输入数(A)和数(B)仅是一位,它无法产生32位数据.也没有发送时钟.如果要构成32位数据字和发送时钟,还需要有数据寄存器和时钟产生器,这样增加许多中小规模片子.如果HS一3182与Hs一5222芯片连接,Hs一3282芯片能提供32位数据和发送对钟,从而节省了许多器件.具俸联接下面叙述.当工作时,+l5伏电源加到+V(9)端,一l5伏电源加到一V(7)端,+5伏电源加到V,(16)端,v和v连接,捷Vt(差动)一士2V一.典型v一V,一5V士5.为保证l00千位,s的速率,C一c一=75PF.同步端(3),时钟端(“)接高电平+5V.选通端(2)应接控制信号.当发送器发送时.加低电平,不发送时加高电平以实现其特点,降低静态功耗.如不加控制信号时,该连接端接地.当输入数据(A)是逻辑l状态,数据(B)是逻辑”O态,通过内部功能块及输出驱动,在其输出端A输出等于V.B输出等于一V一,逮个构成输出高状态,表示数据1当输入数据(A)和数据(B)两者都为逻辑”0”状态,输出九和B两者都为”0”伏,这标志输出无效状态,也就是兰态归零码的零态.当输入数据(A)为逻辑0”态,数据(B)为逻辑1状态,输出A.等于一V,输出B等于V,这个构成输出低状态,即表示数据”0.当在选通端(2)输入高电平,则发器被禁止,输出端A和B一两者是高阻抗状态.驱动器波形图如图2所示.1992年第2j辑(总第46期)电光与控制13H数据(A)OVH数据(B)OV二,L]/,_,厂厂,-,厂一粥一2v\0,,圈2线性驱动器故形图2总线接口电路Hs一3282工作原理.2.1Hs~3282特点与ARINC429规范兼容;数据传送速率100千位/s或l2.5千位/S;独立的接收和发送部分I两个完全独立的接收器,能直接和ARtNC总线相连接;串到并接收数据转换(接收器功能);并到串发送数据转换(发迭器功能);翻3H$--3282总线接口线路方块圈两种申行数据恃输总线接口器件的工作原理及直用1992年第2期<总幕46期)字长25位或32位}接收数据检验奇偶!发送数据产生奇偎i.自动产生字问间隔时问}单一的+5V供电低的电源消耗;完全的军用温度范围.2.2Hs一3282线路方块图Hs一3282线路方块图如圈3所示.2.3Hs一3282线路工作原理Hs一3282线路是高性能cMos总线接口线路,完全满足ARINC429规范.它内部有两个独立的接收器和一个发送器,发送器部分主要由先进先地存贮器和时序电路组成.先进先出存贮器包含8个ARIN—C429数据字.奇偶极性检测位由奇偶产生器产生,是奇校验还是偶校验,侬据PARCK控制信号确定为保证传输数据的速率,外部1L时钟披引入,此时钟频率应为传输数据速率的lO倍.通过内部时钟线路,产生接收器时钟RCVCLK和发送器时钟TXCI,K,圾字问隔所需的对钟.为了减少芯片管脚数,就需减少外部的控髓信号,因此在芯片内部设立控制字寄存器,控制字从数据总线BD--BD通过控制字选通信号瓦丽被锁入控制字寄存器控制字各位的功能与总线数据他D)线剜于下表:垃斟字管脚名符号功能BD∞SLFrT从发送器输出直接接到接收褰的移位寄存器的连缩自测试信号该信号可旁路接收器接收器i接收数据,接收器2不接收数据t即筮送器输出不维持作用(SL~TST瞳能自测试信号低电平).BD*SDENB_激活接收器l源/终译码器信号(逻辑i”傲活源终(sD)译码器)色TX如果SDENB一1.那幺连_直与ARLNC数据也#9比较.如果Y 也相匹配(看Y,),字通过接收器l将被蜚收.如果SDENBI一0这位变成无关紧要.BD∞YI如果SDENB.一1.那幺这位将与ARINC数据位#lO比较,如果xL也匹配,(看×)字通过接收器1将被接收.如果SDENB:一0,这也变成无关紧要.B0.SD激活接收器2源终(sD)译码器的府号(逻辑l”徽活SD译码器)l992年第2期(甚第46期)电光与拉制l5控州字(蜻表)管脚名符号功能BDl?Xt如果SDENBI=1.那么这位将与ARINC数据位#9比较.如果Yt也是匹配的(看Yt).字通过接收器2将被接收.如果SDENBI=O,这位变成无关紧要.DB¨Yt如果SDENB~=1,那幺这位将与ARINC数据位#l0比较,如果Xt也是匹配(信号来自发送器部分.是接收429数据,还是接收发送器部分送来的检测数据,由控制信号一sLF1W决定进来的数据.无论是自测试数据,还是AR1NC429数据,通过字间隔计时器产生的数据时钟(DA TACLOCK)采样.采样频率山接收器/发送器时钟线路产生.所获得的数据时钟(DA TACLOCK),将数据在32位长的数据寄存器中移位(数据S/R移位寄存器).数据字长是32位,还是25位,通过控制信号(WLSEL)进行选择一旦数据字被全部接收(一十32位字),字间隔计时器线路产生(WDCN1)信号,该信号被加到源终译码器上,控制源终译码器产生锁存数据的锁存信号.源终译码器将用户设置码(x和Y)与数据字位9和位lO比较,如果两个码是匹配的,在信号WDCNTI作用下,产生一正的锁存信号,将接收的32位数据锁存在锁存器l中.否2....■■■l6两种申行数据侍输总线接口器件的工作原理及应用1992年第2期(总第46期)则,数据字被忽略,无锁存作用发生通过控制信号S/DENB,能够使S/D译码器使能或被禁止.如果数据字被镇存,指示标记百两建立,这表示有效数据字为用户提取已准备好.进来数据字奇偶极性敲检测,状态(逻辑”0”儡极性,逻辑”l”奇极性)存入接收锁存器如果用户希望存取数据,它首先置数据选择线(SEL)到逻辑”0”屯平,并使能(F~/1)线,这个作用使数据选择器(SEL.)选择第一个数据宇.这个字包含标识码段,并使能到数据总线上为了获取第二个数据字,用户置SEL线到逻辑”1”,并再次使能(END线.第二次使能(E)信号用来复位器件准备好(一D/R一1)触发器,这表示完成了一个接收周期.2.3.2发送嚣工作原理发送器部分由8个宇3l位的先进先出(FIFO)存贮器,奇偶产生器,发送字问隔计时器线路和驱动线路组成.先进先出存贮器FIFO构成这样一个通路,数据被打入到它的输入寄存器,而后自动的传送到作为串行数据发送的输出寄存器.从而节省了大量的数据管理时间.FIFO输入寄存器由两套l6位D型触发器构成,通过两个并行打入信号(和;)计时从数据总线来的数据,在瓦信号的正上升沿打入D型触发器.如果FIFO存贮器被初始化为空的,或堆栈是不满的,数据将自动的向下传送到存贮器堆栈,并进入到输出寄存器或最后一个空出的FI—FO存贮寄存器单元.如果发送器使能信号(ENTX)不作用,逻辑…0,数据保持在输出寄存器中.FIFO存贮器有保存8个3l位字的存贮单元.如果存贮器是满的,新的数据通过PL再次存入,在输入寄存器里,老的数据将被新的数据重写数据保持在存贮器里直到ENTX进入逻辑”l”,这个激活FIFO时钟,并使数据串行移到发送驱动器FIFO输出寄存器被设计成,能够移出2位字长或32位字长的数据,字长通过WLSEL位被再次控制(TXWordGap)字问隔计时器线路在每个字与字之问自动地插入一个等于4位的时钟间间隔,这个对于发送每一个字,给出29位时间(对25位长字)或36位时间(对32位字长)的最小要求如果信号ENTX保持逻辑”l”,在FIFO存贮器中t从一个堆栈向下传送到另一个堆栈的传送堆栈信号产生,这个作用一直持续到最后一个字被移出FIFO存贮器.在这个时间里,发送器准备好的标记(TX/R)建立?与此同时,发送器能接收8个数据宇也准备好.位计数器被用采检测FiFO存贮器移出的最后位,井用奇偶产生器产生的奇偶位来代替它.奇偶产生器有一控制信号(PARCK),速个确认无论是奇极性或偶}厦性都被引入输出的数据字.PARCK置成逻辑”0,将导致偶极性,当被置成逻辑”l,将导致奇极性.发送的数据是否正确,可进行自测试.将发送的数据429D.和429DQ,即SELFTEST信号已接到接收选择器SEL的一个输入端,在控制信号SLFT研’的作用下,完成自测试检测.3Hs一3182,Hs一3282与计算机连接3.1连接框图Hs一3182,HS3282与计算机连接框如图所示.3.2原理说明计算机通过地址线,数据线,控制线送出所需信号通过PAL电路和门电路,形成Hs—t7f1992年第2期(总第46期)电光与控制j7机载火控系统气压高度和真空速的修正,李克已焦红明,/杨立一_●’●●一,’’_-—一【摘要j表文给出了一种由空适系境延迟修正量对机最戈胜袅缱气压高度和真空适进行修正的奄式,计算-T典型条件下的修正值.并对掺正结果连行了分析.最后舛修正套式进行了简化.I关键词】也垦墅壹皇置塑必皇糸纯修正的概念图{HS--3182HS3282与计算机连接框图3282,Hs一3182所需的全部控制信号.计算机的数据总线和Hs一3髓2的数据线BDo~BD-s相连,完成数据通道.ItS一3282产生的D/R,D/R:作为中断信号.连到计算机的中断输入,完成对所接收的串行数据的读取计算机接到两后,送出SEL信号和EN信号,完成读取工作.Hs一3182产生的”rX/R信号,也接到计算机的中断输入计算机接到TX/R后,产生PL信号,分两次将需要发送的数据打入HS一3282中HS一3282输出的数据429D.和429Dc直接接刭HS一3182的数(A)(B)端,HS一3282发送时钟TXCLK接剥Hs一3l82的同步端和时钟端.作为Hs一3182的发送时钟.同步端和时钟端接+5V亦可以.工作时,计算机根据要求,源终情况,奇偶检验,测试与否等,先给HS一3282芯片控制字寄存器送所需的控制字,以便在控剐字作用下完成所需船动能.参考资料[i]Earr~ssemi~omluctor手册[2]lib609~gSZ01数字信息传输系统》[3]ARINC429—4熬字传输总线规范。
DCS Su-27 Flight Manual CHN

Eagle DynamicsiDCS: Su-27 侧卫飞行手册序言Su-27,北约代号“侧卫(Flanker)”,是俄罗斯现代作战飞机的巅峰之作。
侧卫是一种双发、超音速、高机动性能空中优势战斗机,用来与美国研发的F-15”鹰“战斗机进行对抗。
其拥有相当出色的超视距交战能力以及由优秀的低速大迎角机动性能带来的近距格斗能力。
通过所装备的雷达与极具隐蔽性的红外搜索与追踪系统,侧卫可以使用一系列雷达或红外制导导弹。
侧卫同时也拥有一套头盔瞄准系统,飞行员只需要看向目标就可以将其锁定。
除了强大的空对空作战能力。
侧卫也可以装备炸弹和无制导火箭弹去完成对一些对地打击任务。
Su-27战斗机是中国空军装备的第一款第三代战斗机,对于中国空军的现代化进程起到了至关重要的作用。
Su-27以及其中国国产化型号已经成为中国空军、海军航空兵的重要作战力量,而其改进型号,被誉为“终极侧卫”的Su-35BM战斗机,也即进入中国空军服役。
Eagle Dynamics公司从最早的Flanker系列到Lock On系列再到如今的DCS平台,一直将Su-27作为游戏中的主要机型进行开发完善。
DCS World中的Su-27战机模组没有复杂的座舱互动,方便使用,显著优化了学习曲线,非常适合对于模拟飞行感兴趣的军事爱好者去学习了解这型战机,有利于飞行基本原理、空战战术战法等知识的普及。
超级大本营模拟飞行第一混成联队是一支建立在军事爱好者基础上的模拟飞行队伍,DCS:Mig-21Bis 手册的汉化翻译便是由我们联队的成员完成。
作为中国的军事爱好者,Su-27是我们最为熟悉的第三代战机。
因此,我们决定将DCS:Su-27的游戏飞行手册翻译成中文,以方便更多对于Su-27战机有兴趣的国内军事爱好者、模拟飞行爱好者去了解这型中国空军的主战装备。
未来我们也会挑选更多的DCS机型的手册进行汉化,也希望能有更多的朋友,加入到超级大本营军事论坛模拟飞行队伍中来,一起在虚拟的天空中,共同学习,并肩作战。
几种空战战术-LOCK ON
几种空战战术高级空战战术空战是一个复杂、动态的环境。
为了取得胜利,你必须在战斗之前彻底的做好准备。
了解下列高级空战动作将使你在成为空战英雄道路上取得成功。
急转弯(Break Turn)急转弯是所有空战机动中最基本的。
当敌机准备对你射击时,迅速的增加离轴角(AOT),这是个高G动作。
以利用最大的瞬间转弯速度转向攻击者。
一旦你完成一个急转弯,应该马上作出其他的动作。
维持一个急转弯将使你成为一个再好不过的靶子,当急转弯完成后,你与敌机在空间上应该相差不多,一般而言,你的下一个动作应该使你摆脱敌机。
高强势回旋(High Yo Yo)强势回旋是攻击性空战的基础。
在角度战斗中如果你占据了敌机机尾具有攻击性的位置,可采取High Yo Yo,但此时只能采取延迟追击,无法将机首指向敌机时。
注意少许的滚向外侧,维持延迟追击然后拉高机首。
一般来说,一连串小的强势回旋逐渐减少AOT较单一型回旋的效果来的好,一旦在大型的强势回旋中犯错,你将不能对敌机可能突然做出的动作有所反应。
而且,强势回旋可使你不必承受过大的过载就能接近敌机。
低强势回旋(Low Yo Yo)低强势回旋与高强势回旋相反,高强势回旋减小且增加AOT且增加敌我间距离,而低强势回旋则增加AOT且减少敌我间的距离。
当你拥有一个良好的射击机会,但敌机在你武器最大射程之外,为了接近敌机,你将机头压低至地平线以下以增加速度,不幸的,增加速度几乎总是增加了转弯半径,强迫你进入延迟追击并增加了AOT,因此,一个低强势回旋几乎总是需要接着进行高强势回旋以改正因增加速度所导致的角度问题。
低强势回旋通常被用于追击拥有速度优势的敌机,此时敌机企图平飞自你武器的范围内逃离。
在这情况下,你可以压低机首,俯冲于敌机之下,增加的速度将增加接近率,但你必须小心不要降得太快,如果你降的太低或加过多的速度,你将无法将机首指向敌机而它将离你更远。
桶滚(Barrel Roll)桶滚这个名字是从战机行进路线而来的,桶滚不仅是飞行特技,也是一种攻守兼备的机动动作。
LOCK ON2 键位表
lock on su-27雷达使用方法
SU-27武器、告警及雷达系统使用主讲教官lkyfly0844昨天简单介绍了下超视距模式和垂直扫描模式,以及雷达和光电系统的简单使用,以下简明进行文字表述:超视距模式(BVR)分为三种:1.SCAN:扫描模式;2.TWS:边跟踪边扫描模式;3.STT:单目标跟踪(攻击)模式。
1.SCAN扫描模式:首先按【2】键激活超视距模式(BVR),再按【I】开启雷达进入雷达模式下的SCAN扫描模式,这是主要的BVR搜索模式,可以同时探测最多24个目标,通常会使用机载雷达在远距离探测目标,HUD上会显示出搜索并锁定目标的各种信息。
显示信息的距离范围可以用【-】,【=】来调节。
雷达扫描锥的水平转动方位有左,中,右3种位置,可以用【右SHIFT+,】【右SHIFT+/】调整,在HUD上的显示为“雷达方位角覆盖范围条”,其位置如图所见;扫描锥垂直方向上的俯仰角度可以通过【右SHIFT+;】【右SHIFT+.】来调节,在HUD上显示为“雷达仰角覆盖范围条”和旁边小数字显示的“与目标相对高度”,以此更好的来探测和你有高度差(单位为km)的目标;和目标的预期距离可以用【右CTRL+=】【右CTRL+-】来调整在HUD上显示位置是在“雷达方位覆盖范围条”下方的数字,单位为(km)。
当传感器探测到一个目标时候会在HUD上用一条若干点组成的短横线来表示。
如果雷达识别系统识别出是友方目标,则HUD上显示为两条短的平行双横线。
改变距离标尺显示范围可以用【-】,【=】来调节,便于获得远近不同距离探测到的目标信息。
设置不同的雷达脉冲重复频率(PRF)可以针对不同的目标态势进行最有效率的探测可以使用【右SHIFT+I】分别切换:高频(HI):对于“迎面”态势的目标能获得最大探测效果;中频(MED):对于“追尾”态势的目标能获得最大探测效果;高频中频交替扫描(ILV):顾名思义,就是在扫描锥的各个层面采用不同频率交替扫描,但是探测距离会减少约25%且HUD信息反馈时间较长,个人不推荐!HUD左侧距离标尺左边的“I”字母表示此刻雷达已经开机;位于HUD左侧距离标尺的数字“100”表示当前显示范围100km内,数字下面的“HI”表示雷达脉冲频率为高频模式;位于HUD右侧雷达俯仰角标尺中段两条向右突出的短线表示“HUD的可视范围”,会根据俯仰角态势上下滑动;注*位于HUD右侧雷达俯仰角标尺中段一条向左突出的小短线表示的是“地平线”!其位置永远不变!;注**注释:飞机俯仰角度改变,飞行员视线中的座舱和位于正前方HUD的位置相对于远处地平线的位置也在不断变化,因此会发现在HUD右侧雷达俯仰角标尺中段的两条向右突出短线“HUD的可视范围”的位置和雷达俯仰角标尺中段那条向左突出的更短的不会滑动位置的“地平线”的相对位置改变其实就是HUD本身和它背景里的地平线相对位置的缩影!接下来又是个重点!!如果你认真读完以上内容特别是我*注释里的内容,那你应该可以理解我接下去要说的内容了:那么既然我可以目视HUD和舱外远处地平线的相对位置变化为何还要画蛇添足去在HUD 上通过符号来表示出来呢?这一方面是为了方便在夜间视线不佳的情况下执行任务,但更重要的是另一方面:能告诉你原本“隐形”的雷达俯仰角的覆盖范围在你眼前的什么位置,这个位置是根据预期距离的调整和相对高度差的调整在不断变化的,因此单看示意图来解读HUD右侧信息就是:“在50公里远的距离上,高度差相对+1km,雷达俯仰角的覆盖位置大致在HUD可见范围的中部偏下,有一部分扫描锥覆盖到了地面上”2.1 TWS边跟踪边扫描模式:首先按【2】进入超视距BVR模式,再按【I】进入雷达模式下的SCAN扫描模式,再按【右ALT+I】进入到TWS模式下,该模式下雷达可以同时跟踪10个目标,它与SCAN模式的主要区别在于雷达继续搜索过程中保留了探测到的目标参数,并将之转化为俯视图像反馈在多功能显示器HDD上面(SCAN模式下无法反馈除非使用预警数据链),其中包括敌我识别,各个目标的方位所在和运动方向。
LOCK ON操作说明

Shift – Key Pad 1-9 快速移动视角
Ctrl – Key Pad 1-9 一格格移动视角
Alt – Z 一格格移动视角模式
Key Pad Del 开/关锁定观察视角
Shift-Key Pad Del 锁定观察所有导弹模式
Alt-Key Pad Del 锁定观察来袭导弹模式
Shift-. (Period) 雷达/光电系统向下扫瞄
Shift-/ (Slash) 雷达/光电系统向右扫瞄
对地攻击模式
Shift-; (Semicolon) 雷达/电视搜索系统向上扫瞄
Shift-, (Comma) 雷达/电视搜索系统向左扫瞄
Shift-. (Period) 雷达/电视搜索系统向下扫瞄
Ctrl Key Pad +(plus) 在F1,F2,F4,F7,F9视角中切换到武器发射与跟踪视角。切换到除炸弹和导弹外的任一武器的视角
L 座舱照明开/关
M 看右侧后视镜
N 看左侧后视镜
Key Pad * (Asterisk) 放大—同时按下Shift键即放到最大
Shift- - (Minus) 减少高度表基本气压
Shift-P 电源开关
Alt-P 自动螺旋恢复(按住从螺旋状态中恢复
Alt-S 速度保持模式
Alt-E 容易降落模式
节流阀控制
J 自动油门模式
Page Up 快速的加大油门
Page Down 快速的减少油门
Key Pad + (Plus) 平稳的加大油门
Shift-Esc 本地/目标视角摄像机旋转模式切换
座舱视角控制
Lock On键位表
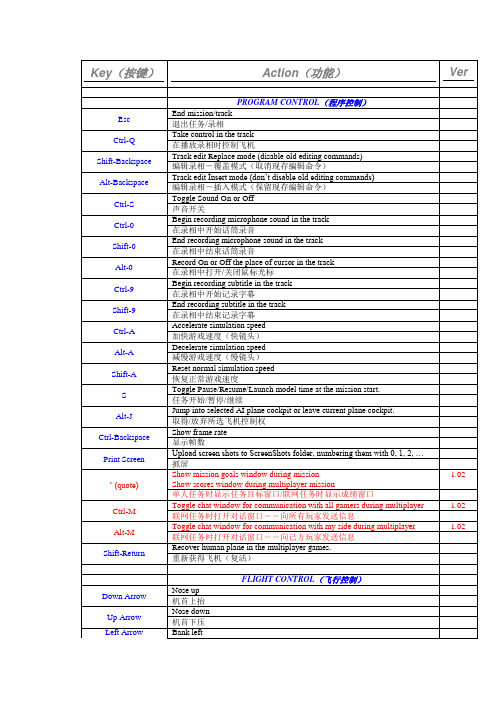
Action(功能) 功能)
PROGRAM CONTROL(程序控制) 程序控制) End mission/track 退出任务/录相 Take control in the track 在播放录相时控制飞机 Track edit Replace mode (disable old editing commands) 编辑录相-覆盖模式(取消现存编辑命令) Track edit Insert mode (don’t disable old editing commands) 编辑录相-插入模式(保留现存编辑命令) Toggle Sound On or Off 声音开关 Begin recording microphone sound in the track 在录相中开始话筒录音 End recording microphone sound in the track 在录相中结束话筒录音 Record On or Off the place of cursor in the track 在录相中打开/关闭鼠标光标 Begin recording subtitle in the track 在录相中开始记录字幕 End recording subtitle in the track 在录相中结束记录字幕 Accelerate simulation speed 加快游戏速度(快镜头) Decelerate simulation speed 减慢游戏速度(慢镜头) Reset normal simulation speed 恢复正常游戏速度 Toggle Pause/Resume/Launch model time at the mission start. 任务开始/暂停/继续 Jump into selected AI plane cockpit or leave current plane cockpit. 取得/放弃所选飞机控制权 Show frame rate 显示帧数 Upload screen shots to ScreenShots folder, numbering them with 0, 1, 2, … 抓屏 Show mission goals window during mission Show scores window during multiplayer mission 单人任务时显示任务目标窗口/联网任务时显示成绩窗口 Toggle chat window for communication with all gamers during multiplayer 联网任务时打开对话窗口――向所有玩家发送信息 Toggle chat window for communication with my side during multiplayer 联网任务时打开对话窗口――向己方玩家发送信息 Recover human plane in the multiplayer games. 重新获得飞机(复活) FLIGHT CONTROL(飞行控制) 飞行控制)
lock on键盘操作及僚机指令

Shift - F9:舰船和地面目标图标开/关
F10:战区视角(地图)
Shift - F10:目标图标开/关
F11:机场塔台与地域视角
Ctrl - F11:切换到塔台与地域视角,保存当前视点(冻结镜头位置)。当从战区视角(F10)切换到本视角,镜头从F10视角的位置开始,但高度不能超过20公里
Alt - I:RWS/TWS模式切换(F-15)
O:光电系统开/关
Ctrl - I:雷达天线/红外扫瞄跟踪球置中
- (减号):多功能显示器中图像缩小
+ (加号):多功能显示器中图像放大
Ctrl - +:加大雷达天线水平扫描方位角限制(F-15)
Shift - Q:持续释放箔条及红外干扰闪光弹(直到干扰弹释放完为止)
Spacebar(空格键):发射当前选定的武器 (注意:在1.02中的美机导弹发射键为:Enter(回车键),机炮:Spacebar(空格键))
Ctrl - W:成对抛弃武器(在空中),装载武器(在地面)
Ctrl - -:缩小雷达天线水平扫描方位角限制(F-15)
自动锁定 Scroll Lock:锁定最近的敌机
Alt - Scroll Lock:锁定距玩家视线中心最近的敌机
Shift - Insert:锁定前一架敌机
F12:静态目标视角
Ctrl - F12:民用运输工具视角
Page Down:快速的减少油门
Key Pad + (加号):平稳的加大油门
Key Pad - (减号):平稳的减少油门
Home:启动引擎
End:关闭引擎
油门控制命令与Alt组合使用
Right Arrow:向右侧滚
苏-27在苏联空中作战体系的作用和运用方式

苏-27在苏联空中作战体系的作用和运用方式第三代战斗机的威胁和苏联的应对美国和苏联在冷战期间的航空装备发展拥有很强的针对性,每当美国新发展一种战斗机后苏联很快就会跟随,但因为美国航空技术具备电子、动力等方面的整体优势,苏联在米格-15/17(F-86)、米格-19(F-100)和米格-21(F-104)时还可做到跟随,但到美国装备设备完善的F-4“鬼怪”II后就已经难以实现对等开发。
为对抗“鬼怪”II研制的米格-23的装备时间就开始出现拖延,当米格-23形成战斗力后美国已经开始装备换代的F- 15,参加中东战争的苏联战斗机已经与以色列的F-15/16形成了代差。
苏联同标准先进战斗机的研制开始时间虽然并不算晚,但技术上的不足仍然导致项目进步研制拖延,直到美国开始发展三代机中期改进型后苏联新机才陆续完成。
美国第三代战斗机广泛装备和出口后苏联仍没有对应的装备,这样的趋势让苏联空军在装备上一度陷入了被动。
米格-29和苏-27代表了苏联第四代先进战斗机的技术标准,其中苏-27应用了远比米格-29更多的先进技术和成品,在综合性和设计标准上代表着苏联航空技术最高的成就。
苏-27的装备使苏联航空兵得到了换代的先进装备,也使苏联战斗机在技术性能上达到了美国同类机型标准。
苏-27是能够与美国最好的F-15正面抗衡的先进战斗机,但因为苏联与美国航空技术水平上的差距和战术体系的明显差异,苏-27在性能指标的重点设置上与F-15有所不同,对这两个机型的优劣对比也存在长期的争议和不同的解读。
苏-27的设计目标和性能标准美国第三代战斗机的存在对苏联航空兵是个很大的威胁,F-15具备航程远、火力强和电子设备先进的特点,在预警机的引导下具备大作战半径和很强的制空能力,对抗和压制F-15是苏联战斗机研制中必须考虑到的问题,F-16这种中型多用途战斗机则并没被苏联空军看重,F-16有限的航程载荷也不容易成为防空军的潜在作战目标。
苏-27和米格-29在设计时虽然面对不同军种的需要,但这两种先进战斗机都有对抗F-15的要求,重型的苏-27在性能和功能上相对更能与F-15进行直接比较。
LOCKON FLAMING CLIFFS键位中文说明

Key Pad 5 停止移动镜头(只对F11有效)
Alt - Key Pad 5 回到塔台与地域视角(F11)的启始点或终止点的视角
Y 外部视角信息显示循环模式
Alt - Y 地表单元格开关
Alt - Backspace 插入视频编辑模式开/关(取代默认)
以下是该游戏的操作方法,比较复杂,我也是从网上查的,到现在有的地方还不明白,呵呵。。原版转载。《锁定:现代空战》正式版键盘操作指令
3GO - 162 / Eagle566 编译整理
说明:中间的 - 表示组合键,Key Pad 表示小键盘 键位 动作
程序控制
Esc
终止任务或停止track回放
Ctrl - , (逗号) 向左侧滚配平
Ctrl - / (斜杠) 向右侧滚配平
Z 左舵(飞行时),左转(滑行时)
X 右舵(飞行时),右转(滑行时)
Ctrl - Z 左舵配平
Ctrl - X 右舵配平
H 高度稳定模式开/关
Shift - M 重置当前警告声
Ctrl - L 机载灯光开/关
Ctrl - Key Pad Del 地形视点锁定观察视野模式(只对F2、F6、F7、F8、F9有效)
Backspace 切换“由目标来/到目标去”的视角观察方向(只对F2、F6、F7、F8、F9、F12有效)
Alt - Delete 视角转换时忽略当前物体
Alt - Insert 把所有被忽略的物体加入视角
Alt - 0 开始或停止录像在指针所在位置
Ctrl - 9 在任务录像中开始录入字幕
Shift - 9 在任务录像中停止录入字幕
LOCKON_FC2_Keycommands_Su-27_EN
I - RCtrl I - RShift O ; . , / ; - RShift . - RShift , - RShift / - RShift = W - LAlt - - RCtrl = - RCtrl = - RAlt - - RAlt R - RShift , - RAlt . - RAlt Space D C V - LCtrl C - LShift Q - LShift Q Delete Insert E E - LWin R - LWin T - LWin Y - LWin Q - LWin W - LWin U - LWin I - LWin G - LWin D - LWin \ Num4 Num6 Num8 Num2 Num9 Num3
Target Designator To Center Radar Pulse Repeat Frequency Select Electro-Optical System On/Off Target Designator Up Target Designator Down Target Designator Left Target Designator Right Scan Zone Up Scan Zone Down Scan Zone Left Scan Zone Right Display Zoom In Display Zoom Out Launch Permission Override Radar Scan Zone Decrease Radar Scan Zone Increase Target Specified Size Increase Target Specified Size Decrease RWR/SPO Mode Select RWR/SPO Sound Signals Volume Down RWR/SPO Sound Signals Volume Up Weapons Weapon Fire Weapon Change Cannon Salvo Mode Cut Of Burst select Countermeasures Countermeasures Continuously Dispense Countermeasures Release Countermeasures Flares Dispense Countermeasures Chaff Dispense ECM Radio Communications Flight - Complete mission and RTB Flight - Complete mission and rejoin Toggle Formation Join Up Formation Attack My Target Cover Me Request AWACS Home Airbase Request AWACS Available Tanker Flight - Attack ground targets Flight - Attack air defenses Communication menu View View Left slow View Right slow View Up slow View Down slow View Up Right slow View Down Right slow
LOCKON各战机中文指导系列新版全部是清晰版啦

LOCKON各战机中文指导系列(新版,全部是清晰版啦)LOCKON各战机中文指导系列(全部是清晰版啦)LOCKON官方说明书不是按飞机种类去介绍,而是将所有飞机的坐舱放在一起介绍,HUD放在一起介绍,等等...除了新增加的F15,A10,SU25,其他的飞机SU27,33和MIG29的说明还是照搬F2的内容,连截图也大多没换.我把各战机的操作说明提出并编译出来,供大家参考,欢迎批评指正!!这次的图片采用了网上销售的LOCKON增强手册电子版中的截图.LOCKON中文指导系列A-10ALOCKON中文指导系列Su-25LOCKON中文指导系列F-15C电子文档在3GOFTP里,使用Acrobat Reader简体中文版5.0以上版本打开阅读...祝猎杀愉快许多飞友都把副翼和襟翼混淆了,其实副翼和襟翼是不同的东西。
flap是襟翼,属于增大机翼升力的设备,与前缘缝翼slat同类。
偏转时左右同方向,一般设在机翼内侧。
而副翼是aileron,是使机身沿纵轴滚转roll的操纵设备,与升降舵elevator、方向舵rudder同类。
偏转时左右反方向,一般设在机翼外侧,这样可获得较大的滚转力矩。
在FLANKER2和LOCKON游戏里,F键控制襟翼,摇杆的左右移动控制副翼。
特别的:SU-27的襟翼和副翼是一体的,称襟副翼,而SU-33和MIG-29是襟翼和副翼分开的。
为LOMAC加入主题音乐,老听对话也烦了点吧?/download/lockon/lomacmusic.exe游戏主画面没有音乐,只有战斗通讯声,总听也烦吧?现在可根据个人喜好酌情安装替换1、有三个不同的音乐文件,随便选择一个。
2、将子目录里的Main.ogg 文件复制到游戏安装目录下的Sounds\Music 覆盖即可,注意备份好原文件以便以后恢复。
3、本文件对游戏没有任何影响。
(天伯同志提供)~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~l o 的主题音乐1。
LOCK ON Su-27空中战斗手册

Su27 Flanker 非官方指导编译 3GO-162/Eagle5663GO 侧卫战队第二飞行大队“在空战中,我总是在想一个问题,就是 找到一条最快通向敌机 6 点的道路” GQ03感谢 XQSW,GQ03,天柏,名菜,james527, laddie 等各位老鸟对 我的鼓励和支持!!!编译 3GO-162/Eagle566 2002.6译注:本文主要译自于 Redshift's Unofficial FAQ ,版权和著作权完全属于原作 者。
由于译者水平有限,可能有错误和遗漏之处,敬请谅解,欢迎批评指正。
中文译本 仅供参考,作为模拟飞行爱好者的业余读物,不得用作任何商业目的。
转载请先征求译 者同意并注明出处。
E-MAIL:ejian3043@2目录一 机炮格斗指导.…………………………………………………………………………………4 (一)PAPA DOC 垂直方向上的战斗指导…………………………………………………………4 (二)PAPA DOC 迎面相遇战斗指导………………………………………………………………8 (三) 我怎样才能击败 AI 对手 (By Sankar) …………………………………………………11 (四)关于对抗 AI 的战术指导(By Tony Volk)……………………………………………12 (五)机炮格斗指导(james527 提供英文版原文)……………………………………………14 二 超视距空战指导………………………………………………………………………………20 (一) PapaDoc 超视距空战指导…………………………………………………………………20 (二) Wag 超视距空战指导 Part I………………………………………………………………22 (三)Wag 超视距空战指导 Part II……………………………………………………………25 (四)BVR 空战小结 By Eagle566………………………………………………………………27 三 常见问题解答…………………………………………………………………………………31 四 如何避免 SAM…………………………………………………………………………………333一机炮格斗指导(一) PAPA DOC 垂直方向上的战斗指导Part 1 你听信 Flanker 的狂热爱好者推荐并购买了 Su-27 Flanker… …最好的喷射战机模拟器。
Flanker2.5 Su-27_A2G空对地攻击指导
Su27 Flanker对地攻击指导编译 3GO-162/Eagle5663GO 侧卫战队第二飞行大队3GO-161/Ur235数字签名人 3GO-161/Ur235 DN :cn=3GO-161/Ur235,c=CN-中国,o= ,ou= ,email=3go_161@163.co m 原因:www.3gofly.co m 位置:www.3gofly.co m 日期:2008.11.11 23:03:52 +08'00'当你进入一个Ironhand 任务时是不是出一身冷汗?心跳加快?汗毛直立?跟我来吧!学习怎样与最厉害的SAM系统较量并击败它。
无论你是Ironhand飞行员或者是Flanker飞行员,只要你想了解更多的有关如何在Flanker的SAM环境中生存的方法,这个指导就会对你有帮助。
序你在这儿所看到的大多数材料是基于,我在这个模拟器中猎杀SAM所经历过的无数个激烈紧张的小时中所获得的知识。
在某些例子中,为了得到完整的资料,我曾从外面的资源中寻找Su-27说明书所没有提供的SAM系统信息。
虽然我彻底的检验过这些战术,但我不打算把它作为Flanker中对抗SAM的定论。
永远有很多知识要学习。
可以这么说,如果能正确的实施,这些战术非常有效。
诀窍是,了解应该做什么动作以及何时做。
注解:如果你看完这个指导,你会发现我已经对每种SAM系统排出了相应的战术。
这个排列主要是基于所用战术应能快速和安全的摧毁SAM系统。
由于战场上没有绝对的事物,这个排列也不绝对适用,但总能提供给你一些选择。
由于环境的变化,一种战术在某种情形下非常有效,但可能在另一种情形中使你丧生。
在与SAM的战斗中,环境意识(SA)所起的作用与在空中格斗中同样重要。
前言使用这个指导没有正确与错误的方法。
只要你喜欢,无论从哪儿都可以开始。
你可以自由的从菜单中选择一种SAM或AAA系统,并学习所对应的战术。
或者,你更喜欢先选择一种战术,然后学习如何击败SAM系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首先按2进入空对空模式,然后按i打开雷达。
按+和-调节扫描距离,用shift+;和shift+.上下调节扫描范围,用shift+,和shift+/左右调节扫描范围,如果敌机在扫描范围内,会在hud上显示出一条横线,如果显示两条横线,表示友机。
确定Hud上出现横线,也就是雷达扫描的回波点,用;,./上下左右移动hud 上的锁定匡,套住横线,按tab锁定目标。
hud左侧出现最大,最小和最佳发射距离,进入发射距离后,Hud上会出现LA或者np字样,表示可以发射,然后按空格键发射导弹。
以上是超视距空战模式,如果进入视距内,就是能够目视看到敌机,就需要使用近距离格斗模式,按3是垂直扫描模式。
按4是孔径模式,按5是头盔模式,按6是盲射模式。
比较常用的近距离格斗模式是3垂直扫描模式,这时候hud上会出现两条竖线,将敌机套在两条竖线中间(敌机位置可以不在hud范围内,视两条竖线上下延长出hud一倍的范围,只要敌机在两条线中间),按tab,即可锁定敌机。
如果要切换武器的话,按d是在导弹间来回切换。
按c是切换到机炮。
一般都是先进行超视距格斗,也就是2模式,在超视距下没有击落敌机,进入近距格斗,普遍使用3模式。
其实近距格斗还有一个5模式就是头盔模式比较常用,但是不太好适应,我还是推荐使用3模式。
苏式战机的敌我识别,在雷达上和HUD显示屏上是有显示的。
先说说超视距空战,我们一般起飞后,会有一个非常不好的习惯,那就是“开雷达”(为什么这是个不好的习惯,在以后的教程里说明),打开超视距作战雷达后(按键盘上的数字2键,这里指的不是小键盘的2,至于是哪个,自己找去,别在这里浪费老师讲课的时间,再捣乱,一样把你当靶机,按键结束后,再按字母I键(不是L是I)),这时,可以通过键盘上的“-”和“=”调整雷达扫描的距离,“-”是增大雷达扫描距离,“=”是减小雷达扫描距离,一般敌人距我们比较远的时候,都是按“-”号,切换到256公里处。
这时当你的友机先你一步起飞,而敌方又是迎面而来,那么你的雷达上会出现敌机的标识和友机的标识(这里指的是在敌机和友机均未开启ECM的前提下,也就是未开启电子干扰的前提下),在没有锁定目标的时候,HUD显示屏(就是你用来瞄准的那个绿色字体的在你正前方的显示屏,是正前方,不是左下或是右下的显示屏,有可能是别的颜色的,颜色可以自己按键盘上的CTRL+H进行调整)显示“-”是代表敌机,显示“=”是代表友机,这下你就可以移动锁定框到“-”上,因
为这是敌机。
但如果敌方与我方均已开启了ECM,在你的HUD上会有很多“-”在不断的闪烁,跳动,这里,你就无法通过上面的办法分清敌我,那么,就必须要先锁定一个目标(管他是敌是友,先锁上再说),之后,会在你HUD上的左侧按“列”的方式显示一列字母(都是单个的),如果这排字母中有一个“F”,那就证明你当前锁定的是友机(即然知道是友机,要是再敢从背后下手,那就墙角站着反省去,反省过后来当靶机),如果锁定后,HUD左侧按“列”的方式显示中没有字母“F”,那就你就可以下手了,大家的英语都很不错,F就是Friend的第一个字母,好了,这下子超视距空战的敌我识别讲完了,下面讲讲,近距空战中的敌我识别:
在近距格斗中,可能不只有你在参战,你的友机可能会在侧翼保护你不被敌方下黑手,可是近距格斗难免少不了用一些翻转,筋斗之类的动作,现在游戏中是开着LABLE的,可以通过LABLE识别,那如果没有LABLE呢?难道你还要给你的目标打个电话问一下?哥们儿,你是哪伙儿的?不现实。
那么怎么操作呢?打开近距空战模式,按键盘上的3(我打你,还说小键盘,上面不是说了,不是在小键盘上),将目标放在可锁定区域内,按TAB进行锁定,锁定后,是不会显示敌友的,这时,你就得再按一下键盘上的I键,(不是L 是I),这时和上面超视距中所显示的就是一样的了,会带一个F的标识,这就证明你现在锁定的是友机,那就敢快取消你的锁定,重新寻找你的目标,WOW,终于找到了,R73一枚,这次听到的就是敌方的惨叫声和友机的欢呼声了,你成功了!
第三种分别敌我的方法,这个比较简单,就是看你屏幕右下方的雷达屏幕,如果上面显示的像是一根棍子插在一个球上的标识,那这就是友机,那你就要小心了,千万不要锁错了,如果像是一根棍子插在一个正三角上的标识,那啥也不说了,往死里揍。