机器人位姿误差建模方法综述(1)
基于激光雷达的移动机器人位姿估计方法综述
Ke w r s o eetma in,ls rrd r,a i rbos y o d :p s si t o a e a a ' h o t  ̄b
行驶的距离和方向. 航位推算 的优点是方法简单 、 价 格低廉 , 但其本质上容易受标定误差 、 车轮与地面的 不 良接 触、 簸等 因 素影 响 , 此误 差 较 大 性 导 颠 因 惯 航 系统 I (nrll vg t nS se s 使用 r 械 NS Iet iai ytm ) a Na o 机 式或激光) 陀螺仪和加速度 计得到机器人 的加速度 信息, 过积 分获 得机器人 的位 姿信息. 通 一般情况
杨 明 王
摘
宏 张
钹
108) 004
( 清华大学计算机系 智能技术与系统国索重 点宴礁蜜 北京
要: 位姿估 计是 移动机器人研究的一个校心 问题. 本文综述 了国内外基 于激光雷达 的移 动机器人 位姿估
计 的最新进展 , 并对各种方法进行分类 、 比较和分析 , 中归纳出应用 中值得注意的问题和 发展趋 势. 从 关 键词 : 位姿估计 f 光雷达 ; 激 移动机器人 中圈分类 号 : TP 4 2 文献标 识码 : B
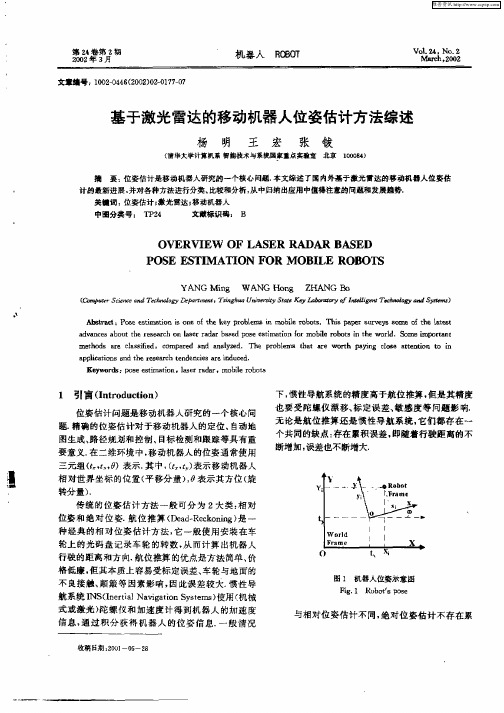
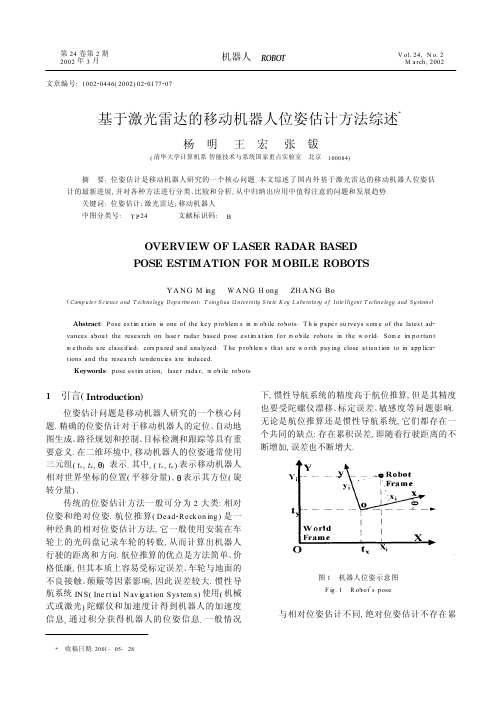
位姿 和 绝 对 位 姿. 位 推 算 ( edR co ig 是 一 航 D a ek nn ) 种 经 典 的 相 对 位 姿 估 计方 法 , 一般 使用 安 装 在 车 它 轮 上 的 光码 盘 记 录 车轮 的转 数 , 而计 算 出机 器人 从
下, 惯性导航系统的精度高于航位推算. 但是其精度 也要受陀螺仪漂 移、 标定误差、 敏感度等 问题影 响. 无论是航 位推算还是惯性导航 系统 , 它们都存在一 个共同的缺点 : 存在累积误差, 即随着行驶距离的不 断增加 , 误差也不断增大.
串联机器人误差建模与精度标定方法研究

2023-10-29CATALOGUE 目录•引言•串联机器人误差建模•精度标定方法研究•实验与分析•结论与展望01引言串联机器人作为自动化生产中的重要组成部分,其精度和稳定性对生产过程具有重要影响。
目前,串联机器人在实际应用中存在不同程度的误差问题,这使得研究误差建模和精度标定方法具有重要意义。
研究背景与意义当前,针对串联机器人的误差建模和精度标定方法研究已取得一定成果。
然而,现有方法在精度、稳定性、实用性等方面仍存在不足,难以满足实际生产中对串联机器人精度的需求。
研究现状与问题研究内容与方法最后,对实验结果进行分析和讨论,提出改进措施以提高串联机器人的精度和稳定性。
然后,设计实验验证误差模型的准确性和精度标定方法的可行性。
其次,建立串联机器人的误差模型,包括几何误差模型和运动学误差模型。
本研究旨在开发一种高效、准确的串联机器人误差建模与精度标定方法。
首先,对串联机器人的结构和工作原理进行详细分析,为误差建模提供基础。
02串联机器人误差建模串联机器人误差来源分析由于制造过程中各种因素的影响,如材料、工艺、设备等,导致机器人各部件存在制造误差。
制造误差装配误差运动学误差环境因素机器人在组装过程中,由于零件之间的配合关系不准确,产生装配误差。
由于机器人运动学参数的不准确,如关节角度、关节偏移等,导致的运动学误差。
如温度、湿度、气压等环境因素的变化,对机器人的精度产生影响。
03误差传递矩阵通过建立误差传递矩阵,可以描述机器人各部件误差对末端执行器误差的影响程度。
基于多体系统理论的误差建模01多体系统理论多体系统理论是研究多个刚体或柔性体相互运动的力学理论,可用于串联机器人的误差建模。
02基于多体系统理论的误差建模方法利用多体系统理论建立机器人的误差模型,考虑了各部件之间的相互运动关系,能够更准确地描述机器人的误差行为。
通过实验验证误差模型的准确性和精度,对比分析实际运动轨迹与理论运动轨迹的差异。
实验验证参数优化自适应算法根据实验结果对误差模型进行参数优化,提高模型的预测精度和鲁棒性。
移动机器人的位姿误差分析及补偿
笔者所述的移动机器人摇 臂各关 节都 是旋 转关节 , 于 对 旋转关节有 3个结构参数 , D一 参 数 d a和 o, 即 , [其误差 主 要 由于机器人在制造和安装 时产生 的 , 数 d或 a有时则 体 参 现 为连杆的长度尺寸。
要确 定机 器人 末端执 行机构 的实际误 差 , 都依赖 于理论 计 这
模型 , 从而分析在各种 因素综 合影 响下 的移动机 器人 平台位
姿误差。 1 1 由静态因素引起的机器人位 姿误 差 .
11 1 移动机器人摇臂 的机构参数误差 ..
算方法的发展。机器人 的位 姿精度取 决于很 多 因素, 因素 其
Ab ta t h sa t l a n lz h o i o n o e e rr o e mo i o o lt r man o g n fo te sai t t s r c :T i r ce h s a ay e te p st n a d p s ro ft bl r b tp af m i r i r m h t t sae i d i h e o i c n h y a ct o a e t ,u e t x df r n a t o oe t bi lt r Sp st n a o e eT r a d t e d n mi w p cs s d t emar i e e t lmeh d t sa l h t ep a om o i o d p s lo d l n d s h i i s h f i n mo e ,a c rid o h o i o n o e c mp n ain a c r i g t eeT rmo e n l s n ee t gr s l t e rb tp a o : are n t e p st n a d p s o e s t c o d n t lo d l ay i a d d t c n e ut o t o o l t r i o oh a s i h fm Ke r s:s t ;d n i ;p st n a d p s ro ;p st n a d p s o e s t n y wo d ti a c y a c o i o n o e e rr o i o n o e c mp n ai m i i o
移动机器人的位姿误差分析
0 引 言
△。 —— 由环 境 温 度 变 化 而 引起 的 连 杆 尺 寸 误
差。
在实 际应用 中 ,无论 制造 精 度多 高 ,都 会 由于各
杆和关 节 的弹性 变形 及振 动 。
1 1 由静 态因素 引起 的机 器人 位姿误 差 .
自身 的重 力 、外 力 以及 惯性 力 的作用 下 ,会 使 机器人
平 台产生 位姿 误 差 。机器人 摇 臂各关 节 的柔性 实 际上 将导 致关 节产 生相 应 的运 动变 量误差 ,由关节 的柔 性 所造 成 的运 动变量 误 差 △ 为 :
移 动机 器 人 的位 姿误 差 分 析
卢 军 民 ,刘 俊 张平 格 ,
(. 河 北 工 程 大 学 机 电 学 院 ,河 北 邯郸 1 0 6 3 ;2 上 海 交 通 大 学 机 械 与 动 力 工 程 学院 ,上 海 50 8 . 203) 0 0 0
摘 要 : 静 态 和 动 态 两 个 方 面 分 析 了移 动 机 器 人 平 台位 姿 误 差 的 主 要 来 源 , 用 矩 阵 微 分 法 建 立 了 平 台 位 姿 误 从 采 差 的 模 型 ,并 根 据 建 模 分 析 和平 台 实 时位 姿检 测结 果 对 机 器 人 平 台进 行 位 姿 补 偿 。
维普资讯
第 5期 ( 第 1 4期 ) 总 4
20 0 7年 1 O月
机 械 工 程 与 自 动 化 MECHANI CAL ENGI NEERI NG & AUT0M AT1 0N
No.5
0c . t
机器人的位姿运动学2017 (1)

A transformation may be in one of the following forms: A pure translation A pure rotation about an axis A combination of translations and/or rotations
no a
上式包含了正确的右手法则关系,所以一般使用这个等式判断3个向量之间的关系。
2. 齐次(变换)矩阵
Homogeneous Transformation Matrices
4 by 4 matrices:
Can be pre- or post-multiplied Easy to find inverse of the matrix Represents both orientation and position information, including directional vectors
z
ox oy oz 0
ax ay az 0
a
px d x py d y pz d z 1
a
d
相对于固定坐标系,新坐标系位置可通过 在原坐标系矩阵前面左乘变换矩阵得到。
p
n
o n
o
x
y
Representation of a Pure Rotation about an
z
z
o
a n o x World Reference Frame y x Joint Reference Frame y
x Tool Reference Frame
y
【机器人的参考坐标系】
a
n
1. 机器人运动学的矩阵表示
4.4工业机器人D-H建模方法-课件(1)

沿 X i 1 测量的距离
绕 X i 1 旋转的角度
:从 X i 1到 X i 沿 Z i 测量的距离
i :从 X i 1到 X i 绕 Z i 旋转的角度
D-H建模步骤
原则:先建立中间坐标系{i},后两端坐标系{0}{n} 1)确定Z轴:找出关节轴线及关节转向采用右手定则确定Z;
cosθ i i sin θ i cosα (i 1) T i 1 sin θ i sin α (i 1) 0
sin θ i cosθ i cosα (i 1) cosθ isin α (i 1) 0
0 sin α (i 1) cosα (i 1) 0
2)确定原点:如果两相邻轴线Zi与Zi+1不相交,则公垂线与轴线i的交
点为原点,注意平行时原点的选择应使偏置为零;如果相交则交点 为原点,注意:如果重合则原点应使偏置为零; 3)确定X轴:两轴线不相交时,X与公垂线重合,指向从i到i+1; 若两轴线相交,则X是两轴线所成平面的法线; 注意:如果两轴线重合,则X轴与轴线垂直且使其他连杆参数为零; 4)按右手定则确定Y ;
中间连杆坐标系 {i}
Z轴-与关节轴i共线,指向不定;
X轴-与公垂线重合,指向从i到i+1 当相交时,
X i Z i1 Z i
原点O取为XZ的交点;
Z i和Z i1 相交时,其交点为{i}原点, Z i和Z i1 平行时,{i}原点取在使偏置为零处。
坐标系与连杆参数
ai 1 :从 Z i 1到 Z i i 1 :从Z i 1到 Z i
关节i上的两条公法线ai与 ai-1之间的距离,沿关节轴线i 测量,如关节是移动关节,则 它是关节变量。
a(i - 1
基于激光雷达的移动机器人位姿估计方法综述
法 他从图像中抽取出垂直边缘的角度 然后与 维
地图匹配得到当前机器人的位姿≈ ≥
采用占
据网格表示 使用线段的方向! 共线性! 重叠程度来
进行匹配 并采用
滤波来提高位姿估计的精
度≈ ≥
使用激光雷达实现了该方法 由于传感
器自身的精度较高 他不仅使用了线段特征 还使用
了角点特征 从而提高了结果的可靠性≈ 为了减少
关系 ≥
最早使用占据网格表示实现了该方
法≈
点2点对应方法的一个核心问题是定义一个合适
的规则来确定当前扫描与参考扫描中点的对应关
系 最近点规则 ≤ ° ≤
° 是一种常用的规
则 它选择参考扫描上的最近点作为当前扫描数据
点的对应点
和
根据该规则提出了一个
通用的迭代最近点算法 ≤°
ò
°
并证明了该算法在最小方差距离函数意义下
格以移动机器人为中心 直接使用当前扫描数据表
示环境 可用于躲避静态和动态障碍物 全局占据网
格初始为空 随着机器人的移动 不断使用局部占据
网格进行修正 可用于全局路径规划
距离数据表示的另一种方法是使用线段! 角点
等参数化特征 基于特征的表示的优点是可以方便
地手工输入和在计算机上显示 这种表示方法同样
适于路径规划和位姿估计 但是传感器数据中的噪
何标定过程 从而提高系统的精度! 可靠性! 易实现
性并降低成本
2 距离数据的表示 Ρ επρεσεντατιον οφ ρανγ ε
δ ατα
目前常用的激光雷达为 维脉冲式激光雷达
它一般包括一对脉冲近红外发射器和接收器 通过
测量发射到接收的时间差 即可计算出目标的距离
一个绕垂直轴高速旋转的反射镜 它将激光束平行
机器人的位姿描述课件
通过位姿描述,可以确定机器人 在空间中的位置、朝向和姿态, 对于机器人运动学、导航、遥控 等领域具有重要意义。
机器人位姿的表示方法
欧拉角表示法
以绕三个轴(横滚、俯仰、偏 航)的旋转角度为基础,描述
机器人的姿态和朝向。
方向余弦矩阵表示法
通过三个方向的单位向量和三 个方向的旋转角度,构建一个 方向余弦矩阵,描述机器人的 姿态和朝向。
总结词
精准、稳定、高效
详细描述
工业机器人通常需要高精度、稳定性和效率来提高生产效率、产品质量和降低生产成本。位姿控制策 略是实现这些目标的关键技术。通过对工业机器人的运动学和动力学模型进行分析和优化,可以实现 对机器人位姿的高精度控制。
全
详细描述
手术导航
医疗机器人在手术导航中通过位姿描述, 实现精确的手术定位和操作。
康复治疗
医疗机器人在康复治疗中,通过位姿描述 评估患者的运动功能和康复进展。
辅助行走
医疗机器人在辅助行走中,通过位姿描述 实现稳定、安全的行走辅助。
航空航天机器人
空间探索
航空航天机器人在空间探索中通过位姿描 述,实现精确的物体抓取和运输。
无人机配送
航空航天机器人在无人机配送中,通过位 姿描述实现准确、高效的配送服务。
机场跑道清扫
航空航天机器人在机场跑道清扫中,通过 位姿描述实现高效、安全的清扫作业。
04
机器人位姿描述的挑战与解决方案
传感器误差与位姿估计
传感器误差
机器人的传感器在获取自身及环境信息时存在误差,包括安装偏差、测量不准确 等问题,对位姿估计造成影响。
平移向量
平移向量是用于描述物体在空间中沿 某三个方向移动的向量,通常用三个 连续的数值表示。通过平移向量,可 以确定机器人在空间中的位置。
位姿估计方法
位姿估计方法位姿估计是一个相对较新的概念,它在机器人领域的应用非常广泛。
位姿估计的目的是确定机器人的姿态和位置,对于机器人完成任务非常重要。
本文将介绍位姿估计的概念、方法和应用。
一、概念一般地,机器人的位姿可以由以下三个元素来描述:姿态、位置和速度。
其中,姿态是机器人的朝向,位置是机器人相对于参考点的位置,速度是机器人相对于时间的位移。
机器人在进行任务执行时,需要自行估计位姿,以便判断自身的运动方向和空间状态。
二、方法1、基于传感器的位姿估计方法基于传感器的位姿估计方法是目前应用最为广泛的一种方法。
传感器主要包括GPS、加速度计、陀螺仪、激光雷达、视觉传感器等。
传感器可以测量机器人的外部状态信息,如位置、速度、角度等。
根据测量数据,可以通过图像处理技术进行位姿估计,从而实现机器人的自主导航。
2、基于模型的位姿估计方法基于模型的位姿估计方法是建立可靠的机器人动力学模型,通过模拟机器人在环境中的运动和状态转移,最终得出机器人的位姿。
该方法需要建立比较完整的机器人模型,同时需要准确地掌握机器人各部件的物理参数,如摩擦力、惯性力等。
3、基于滤波的位姿估计方法基于滤波的位姿估计方法是通过滤波算法对测量数据进行处理,从而实现机器人的位姿估计。
该方法主要是通过对测量数据进行滤波处理,得到更加准确的位姿结果。
一般地,滤波算法主要包括卡尔曼滤波、粒子滤波、扩展卡尔曼滤波等。
这些方法通过对测量噪声进行处理,提高位姿估计的准确度。
三、应用1、自主导航位姿估计在自主导航中的应用非常广泛。
通过对机器人的位姿进行估计,机器人可以自主感知周围环境的变化,可以做出更加智能的决策,实现自主导航。
2、机器人操作在机器人操作中,位姿估计是非常重要的一部分。
机器人需要准确感知自身位置和姿态,以便更加精确地执行各种任务。
3、虚拟现实在虚拟现实中,位姿估计是非常重要的一部分。
虚拟现实需要准确感知用户的位置和姿态,以便更好地解决各种问题。
四、总结位姿估计是机器人领域中的一项基础技术,可以实现机器人自主导航和精确操作等多种功能。
机器人建模与仿真算法

机器人建模与仿真算法引言机器人建模与仿真是现代机器人技术中的核心内容之一。
借助建模与仿真技术,可以实现对机器人的动力学、运动控制、感知系统等进行全面的分析与验证,从而为机器人的开发与应用奠定坚实的基础。
本文将从机器人建模与仿真的基本原理开始,介绍常用的机器人建模方法和仿真算法,并讨论目前该领域中的研究进展和应用前景。
一、机器人建模方法1. 几何建模法几何建模法是机器人建模中最基础的方法之一。
该方法通过对机器人的几何结构进行建模,来描述机器人在空间中的位置、姿态等信息。
常用的几何建模方法有欧拉角表示法、四元数表示法和转移矩阵表示法等。
这些方法主要应用于描述机器人的位姿和运动学关系。
2. 动力学建模法动力学建模法是机器人建模中的另一重要方法。
该方法通过运动学和动力学的方程来描述机器人的运动和力学行为。
机器人的运动学可以通过关节坐标和连接关系来描述,而动力学则进一步研究机器人的力学特性和运动学关系之间的关系。
常用的动力学建模方法有拉格朗日方程法、牛顿-欧拉方程法等。
3. 变分原理建模法变分原理建模法是机器人建模中较为复杂的方法之一,也是研究机器人动力学的重要手段。
该方法利用变分原理,将机器人的动力学方程转化为能量最小化的问题,从而求解出机器人的轨迹和运动规律。
常用的变分原理建模方法有哈密顿原理、哈密顿-雅可比原理等。
二、机器人仿真算法1. 刚体仿真算法刚体仿真算法是机器人建模与仿真中常用的算法之一。
该算法基于刚体动力学理论,通过对机器人的质量、转动惯量等物理特性进行建模,模拟机器人在力和力矩作用下的运动行为。
常用的刚体仿真算法有欧拉方法、中点法、龙格-库塔方法等。
2. 运动学仿真算法运动学仿真算法是机器人建模与仿真中的另一重要算法。
该算法基于机器人的运动学方程,模拟机器人的运动轨迹和关节角度等运动特性。
常用的运动学仿真算法有正向运动学算法、逆向运动学算法等。
3. 动力学仿真算法动力学仿真算法是机器人建模与仿真中复杂但重要的算法之一。
机器人误差分析

= &z 0 -&x dy
-&y &x 0 dz
0 00 0 因此,J可看成是有&和d两个矢量组成的,&称为微分旋转矢量,d称为微分平移矢量,分别表示为
&=&xi+&yj+&zk
d=dxi+dyj+dzk &和d合称为微分运动矢量,用D表示为
dx
dy D = dz
d
或
D=
&x
&
&y
&z
Page ▪ 7
7
已知一个二自由度机器人及其坐标系,如下图所示。
误差计算
图1 二自由度机器人手部的微分变化
Page ▪ 8
ቤተ መጻሕፍቲ ባይዱ
8
若因杆件1下关节轴承装配或制造不当,使杆件1沿关节轴线有0.05单位 的偏差,又由于两杆件的执行器运动不准确,旋转执行器使杆件1多转 一个0.01rad的偏差角,移动执行器使杆件2移动了一个0.1单位的偏差 距离。若杆件1的长度L1=5单位,试求当机器人关节变量取O1=90度, d2=10单位时,机器人手部位姿的偏差。
J0= 0.01 0 0 0 0 0 0 0.05 0 00 0
由此可得机器人手部位姿的为偏差为 0 -0.01 0 0.1
dM02=J0M02= 0.01 0 0 0 0 0 0 0.05 0 000
00 10 01 00
1 10 05 00 01
-0.01 0 0 0.05 = 0 0 0.01 0.1
Page ▪ 3
3
机器人误差分类
▪ 按照误差的来源和特性,可将它们分为不同的类型。从误差的来源来看,主要是指机械 零件、部件的制造误差、整机装配误差、机器人安装误差,还包括温度、负载等的作用 使得机器人杆件产生的变形,传动机构的误差,控制系统的误差(如插补误差、伺服系 统误差、检测元器件)等。我们将与机器人几何结构有关的机械零件、部件的制造误差、 整机装配误差、机器人安装误差、关节编码器的电气零点通常和关节的机械零点不相一 致等因素引起的误差称为几何误差。
机器人位姿误差的分析与综合共3篇
机器人位姿误差的分析与综合共3篇机器人位姿误差的分析与综合1机器人位姿误差是计算机视觉和机器人技术中的一个重要问题。
位姿误差指的是机器人末端执行器相对于目标位姿的实际偏差。
对于机器人控制、路径规划和运动监控等应用来说,位姿误差的大小和分布都是决定机器人性能的重要因素。
因此,针对机器人的位姿误差问题,需要深入分析其原因和解决方法,以提升机器人的精度和可靠性。
机器人位姿误差的原因主要有两个方面:机器人本身的设计精度和机器人在运动过程中受到的干扰。
机器人本身的设计精度是机器人位姿误差的主要来源之一。
由于机器人的机构、传动和控制系统都存在着设计和制造误差,这些误差会直接导致机器人运动时的姿态偏差。
例如,机器人本体的结构不稳定,机械臂结构的刚度或精度低下,机器人的定位传感器误差等都会造成机器人姿态的误差。
另一方面,机器人在运动过程中会受到许多干扰因素,例如运动惯性、摩擦阻力、工具质量等。
这些因素都会影响机器人姿态控制的稳定性,并且导致位姿误差的产生。
为了解决机器人位姿误差问题,需要采取一系列的方法来改善机器人的控制和监测。
具体来说,主要有以下几个方面:一、增强机器人的设计和精度控制,包括机器人的机构刚度和精度、运动控制系统、位姿检测和修正等。
机器人的机构刚度和精度要求高,能够减少机器人自身的误差,并确保控制系统的稳定性。
运动控制系统应采用高精度的速度控制和位置控制方式,能够对机器人的位姿误差进行有效的纠正。
位姿检测和修正部分应该包含高精准的传感器组件,例如激光测距仪、视觉跟踪系统等,以及精准的算法模型,例如Kalman滤波器、扩展卡尔曼滤波器等,能够实现对机器人实际姿态的高精度检测和纠正。
二、改进机器人运动的控制算法和结构,包括路径规划、运动监测和控制器设计等。
针对机器人运动的过程中,偏差和干扰干扰因素的影响,应该采用自适应的控制算法来对机器人进行实时控制。
限制关节智能控制方法应该采用过程伺服控制,通过运动监测对机器人的位置变化进行实时补偿,并优化控制器的设计,提高控制器的精度和反应速度。
一种有效的移动机器人里程计误差建模方法
1 里程计模型
针对同步驱动和差动驱动轮式移动机器人根据 运动学原理对其运动过程中的位姿变化进行描述. 假定机器人的任意运动路径被分割成无数段小弧线 轨迹, 由位姿 sk 到 sk+1 的运动路径就可看作半径为 rk 的一小段弧线轨迹, 机器人弧线运动的弧度角 γ
2期
杨晶东等: 一种有效的移动机器人里程计误差建模方法
N −1
+ Qk
∇sj k = 0 0
1
0 1 0
N −1 i+1 rk (cγk − cγk )
(9)
N −1 i+1 rk (sγk − sγk ) 1
其中, Qk 表示过程噪声 (非系统误差) 协方差. 式 (2) 的两个雅可比矩阵为
1 sk = 0 0 uk = ∆sγ ∆γk ∆cγ − ∆γk 0 0 1 0 − rk (cγk+1 − cγk ) 1 rk (∆sγ ) + rk cγk+1 ∆γk rk (∆cγ ) + rk sγk+1 ∆γk 1 (4) rk (sγk+1 − sγk )
收稿日期 2007-10-08 收修改稿日期 2008-02-20 Received October 8, 2007; in revised form February 20, 2008 国家高技术研究发展计划 (863 计划) (2006AA04Z259), 国家自然科 学基金 (60573108) 资助 Supported by National High Technology Research and Development Program of China (863 Program) (2006AA04Z259) and National Natural Science Foundation of China (60573108) 1. 上海理工大学计算机与电气工程学院 上海 200093 2. 哈尔滨 工业大学计算机科学与技术学院 哈尔滨 150001 3. 上海第二工业大 学经济管理学院 上海 201209 1. School of Computer and Electrical Engineering, University of Shanghai for Science and Technology, Shanghai 200093 2. School of Computer Science and Technology, Harbin Institute of Technology, Harbin 150001 3. School of Business Management, Shanghai Second Polytechnic University, Shanghai 201209 DOI: 10.3724/SP.J.1004.2009.00168
探讨机器人的误差分析

探讨机器人的误差分析通常工业机器人的精准度是由机器人的手部工作执行器的位置与姿态误差来表述的,它是反映机器人工作性能的主要指标之一。
现阶段学者们针对机器人误差方面的研究主要可以分成这几个方面:一个是对机器人误差进行理论上的预测,一个是进行实验来分析机器人误差的起因、程度,还有一类是专门针对如何避免或者减少机器人误差而进行的补偿技术的研究。
现阶段主要是运用建立在机器人正运动学的解的基础之上的分析方法来进行机器人手部工作执行器的位置和姿态的静态误差分析。
一般通过矢量算法和矩阵算法,在机器人机构参数已知,包括杆长参数值已知,关节孔心距值已知和设置初始制造误差值的情况下,对累积到手部的位置和姿态的误差值进行分析和研究。
这种分析方法一般情况下是将整个机构想象成刚体来进行的,故这种方法不考虑机构在运动过程中发生的形变,只是讨论分析其运动改变量引起的误差和机构长度等参数引起的误差。
机器人误差问题的提出是在工业机器人诞生二十多年之后,由 A.Kuman和K.J.Waldron在1978年首次提出机器人位置误差问题。
第二年,他们在第五届国际机构学与机器科学世界大会(IFToMM)上又对机器人的位置精度的分析研究提出了一种比较完整的方法。
A.Kuman和K.J.Waldron在Denavit-Hartenberg的坐标系中采用了两个3x3变换矩阵与一个三维的平移的列矢量组成了相邻构件间的坐标变换矩阵,其中假设研究对象的结构参数是已知的,而且不存在误差,以此为基础建立了机器人末端执行器的位置误差的表达式。
在1983年的第六届国际机构学与机器科学世界大会上,帕拉卡什和库曼将机器人机构的长度,关节孔心距等误差考虑到了整体误差模型中,并推导出了其模型的表达式。
1984年时,吴奇壕把保罗的机器人机构的运动分析的方法运用到静态误差的分析之中,推导出了因构件的结构参数的误差和关节运动变量的误差而引起的机器人手部工作单元在笛卡尔空间相对于整体坐标系的位置误差改变的趋势。
六关节机器人位姿精度测量与误差分析

六关节机器人位姿精度测量与误差分析王海霞;吴清锋;刘仲义;蒋建辉;王清忠【摘要】为准确测量机器人位姿精度,指导机器人应用,以六关节机器人为研究对象,基于其D-H运动学参数进行建模,利用激光跟踪仪和Beckhoff EtherCAT控制系统搭建了同步测量试验平台.根据ISO9283:1998和GB/T 12642-2013,通过单点激光跟踪干涉仪法,测量30个指定位置将测量系统和机器人转换到了一个公共坐标系,选取工作空间测试平面及5个位姿点循环30次精确测量了位姿精度,形成了符合现行标准的有效检验检测方法.对测量数值进行了初步评估,分析出该机器人精度误差主要来源于Z轴方向.%In order to measure pose accuracy of robots accurately and guide the application of robots,this study is based on a six-joint robot,set up the model according to D-H kinematics parameters,and use the laser tracker and Beckhoff EtherCAT control system to build the simultaneous measuring platform.According to ISO 9283:1998 and GB/T 12642-2013,the paper selects the single-spot laser tracking interferometer method and transforms the measurement system and the robot to a common coordinate system by measuring 30 specified positions.The pose accuracy is precisely measured by selecting test plane in the working plane and 5 poses in the plane,moreover running 30 times,these processes form an effective measured methods in line with standards.The results are evaluated preliminarily,and analyze the studied robot error is mainly from the Z-axis direction.【期刊名称】《制造技术与机床》【年(卷),期】2018(000)006【总页数】6页(P34-39)【关键词】六关节机器人;激光跟踪仪;Beckhoff EtherCAT;位姿精度;测量【作者】王海霞;吴清锋;刘仲义;蒋建辉;王清忠【作者单位】广东产品质量监督检验研究院国家工业机器人质量监督检验中心(广东),广东佛山528300;广东产品质量监督检验研究院国家工业机器人质量监督检验中心(广东),广东佛山528300;广东产品质量监督检验研究院国家工业机器人质量监督检验中心(广东),广东佛山528300;广东产品质量监督检验研究院国家工业机器人质量监督检验中心(广东),广东佛山528300;广东产品质量监督检验研究院国家工业机器人质量监督检验中心(广东),广东佛山528300【正文语种】中文【中图分类】TP242.2工业机器人在制造业转型升级中应用广泛,渗透到汽车、电子、医疗及航空航天行业。
激光雷达的应用
(1)基于激光雷达的移动机器人位姿估计方法综述位姿估计方法是移动机器人研究的一个核心问题,精确地位姿估计对于机器人的定位、自动地图生成、路径规划等具有重要意义。
传统的位姿估计方法在不同程度上都有位移误差较大、成本较高的缺点。
而激光雷达刚好解决了这个问题。
目前常用的激光雷达为2维脉冲式激光雷达,这种方法有两个重要的步骤:距离数据的表示和距离数据的对应。
数据的表示。
利用一对脉冲近红外发射器和接收器,通过测量发射到接受的时间差,即可计算出目标的距离,从而得到关于环境的水平剖面图。
对于静态环境的表示方法目前比较好的方法是Gonzalez提出的混合式表达方法,这种方法综合了基于特征的表示方法和占据网格的表示方法而提出的一种同时具有两者各自优点的方法。
距离数据的对应。
目前已有的对应方法有特征—特征、点—特征和点—点等。
以下主要介绍三类。
特征—特征对应方法首先从参考扫描和当前扫描中分别抽取出一组特征,然后是用特征的属性和特征间相对关系对两组特征进行匹配,得到一组特征对,最后使用迭代的方法求解机器人的位姿,使特征对之间的误差最小。
点—特征与特征—特征方法的不同主要在于它直接使用当前的原始数据与参考扫描的特征进行匹配,匹配的依据是点到线段的距离。
由于这种方法在匹配中直接使用了原始的距离数据,避免了中间的特征抽取过程,因此这种方法的精度略高于特征—特征方法。
点对点的方法是利用一个合适的规则直接匹配2个扫描中的数据,从而得到相对位姿的关系,目前这个常用的规则是最近点规则。
(2)激光雷达技术在城市三维建筑模型中的应用“数字城市”是数字地球技术系统的重要组成部分,而表达城市主要物体的三维模型包括三维地形,三维建筑模型、三维管线模型。
这些三维建筑模型是数字城市重要的基础信息之一。
而激光雷达技术可以快速完成三维空间数据采集,它的优点使它有很广阔的应用前景。
机载雷达系统的组成包括:激光扫描器、高精度惯性导航仪、应用查分技术的全球定位系统、高分辨率数码相机。
机器人误差分析
机器人手部相对于机座坐标系的平移误差和旋转误差就相当于微分平移 矢量和旋转矢量,即
d0=0.1i+0j+0.05k,
&0=0i+0j+0.01k0.01 0 0.1 0 0 0 0 0.05 0 0 1 0 0 0.05 0 0 1 0 1 10 0 0 0 5 0 1 0 0
0.01 0
由此可得机器人手部位姿的为偏差为 0 -0.01 0 0.1 dM02=J0M02= 0.01 0 0 0 -0.01 = 0 0 0 0 0 0 0 0 0.05 0 0 0
0.01 0.1
0
0
0
0
0
0
0.05
0
10
感谢您的关注
4
机器人误差模型概 述
由于机器人的误差包括系统误差与随机误差,因此也就相应的产生了 概率型和常规模型两类建模方式。 概率模型用随机变量描述误差源,建立机器人机构运动模型。进而通 过积或Monte Carlo方法,求解机器人对于指定的误差范围,其手部被 定位于该范的概率值,然后绘制出机器人工作空间某一截面上的概率 等值曲线,以了解机人末端位姿误差的分布规律。 常规模型则是根据误差源本身所遵循的物理规律和机器人运动方程, 直接者间接地求解出机器人末端的误差模型。根据误差源本身的特性, 常规模型又以分为静态误差模型和动态误差模型。在机器人静态建模 方面,一般是把静态差因素作为相应变量的微小量,利用机构运动学 分析方法,推导出机器人静态差的数学模型。文献利用微分法,通过 误差传递矩阵给出了机器人末端位的数学模型,并基于这一模型编程 计算了位姿精度的概率等高线。文献提了通过直接对各个误差的微小 位移矢量进行合成,建立手部位姿误差数学模型微小位移合成法。更 常用的方法是在D-H坐标下,通过对机器人的4×4齐次换矩阵求偏导, 建立起误差模型。但是,这种建模方法有一个严重的缺点就是机器人 本体含有两个连续的平行连杆时,微小误差模型就不再适用了。
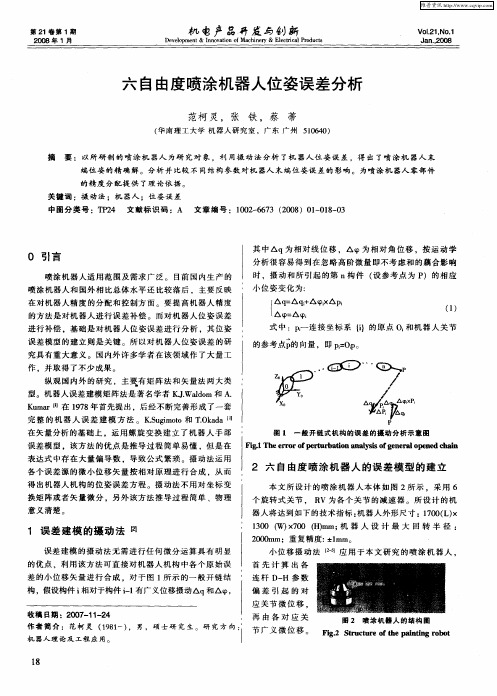
六自由度喷涂机器人位姿误差分析
第2 1卷 第 1期
20 0 8年 1月
D v lp n & I n v t n o c iey & E e t c l r d cs e e me t n o a i fMa h n r o o lcr a o u t i P
机 电产 品 开发 与刨 崭
构 ,假设 构件 i 相对于构件 i1 - 有广义位移摄动 △q和△‘, P
收 稿 日期 :2 0 — 1 2 0 7 1—4 作 者 筒 介 : 范 柯 灵 ( 9 1 , 男 ,硕 士 研 究 生 。 研 究 方 向 : 1 8 -)
机 器人 理 论及 工程 应 用 。
再 由 各 对 应 关 节广 义 微 位 移
的 方 法 是 对 机 器 人 进 行 误 差 补 偿 。 而 对 机 器 人 位 姿 误 差
fq△ j ‘ △ q△P A -
【 ‘:△ △ P
f 1 )
进行 补偿 ,基础 是对 机器 人位 姿误 差进行 分 析 ,其 位姿 误 差模型 的建立 则是 关键 。所 以对机 器人 位姿 误差 的研 究具 有重大 意义 。 国内外许 多学 者在 该领 域作 了大 量工 作 。并 取得 了不少 成果 。
Vo1 No. . 21。 1
J an. 0 , 8 20
六 自由度喷涂机器 人位姿误差分析
范柯 灵 ,张 铁 ,蔡 蒂
( 南 理工 大 学 机 器 人研 究 室 .广东 广 州 5 04 ) 华 16 0
摘
要 :以所研 制 的喷 涂机 器人 为研 究对 象 ,利 用摄 动 法 分析 了机 器人 位姿 误 差 ,得 出 了喷涂 机 器人 末 端位 姿 的精 确 解 。分 析并 比较不 同结 构参数 对机 器人 末 端位姿误 差 的影响 。为喷涂 机 器人 零部 件 的精 度分 配提供 了理 论依据 。