人工变量法和大M法
第3章09-人工变量法之两阶段法
第3章09人工变量法之两阶段法同学们大家好,今天我们继续来学习,人工变量法这一小节。
现在我们再来看第二个方法——两阶段法。
大M 法和两阶段法实际上各有优缺点,大M 法的原理很清晰,但是在用计算机求解时,对M 只能输入一个很大字长的数字,而模型的参数与M 有可能比较接近,从而可能会在计算过程中发生一些错误。
而两阶段法不需要设定大M ,不会发生这个问题,所以,计算机程序中一般都采用两阶段法。
两阶段法,顾名思义,就是把求解过程分成两个阶段进行。
第一个阶段,在原模型中,引入人工变量,使约束矩阵中有一个单位阵,同时,目标函数是求人工变量的和的最小值。
求解完之后,如果人工变量不取零,那么能证明原模型一定无可行解,反之,如果人工变量是都取零的,那么这个时候实际上也找到了原模型的一个可行基,然后再进一步求出原模型的解。
下面我们通过例3-7进行介绍。
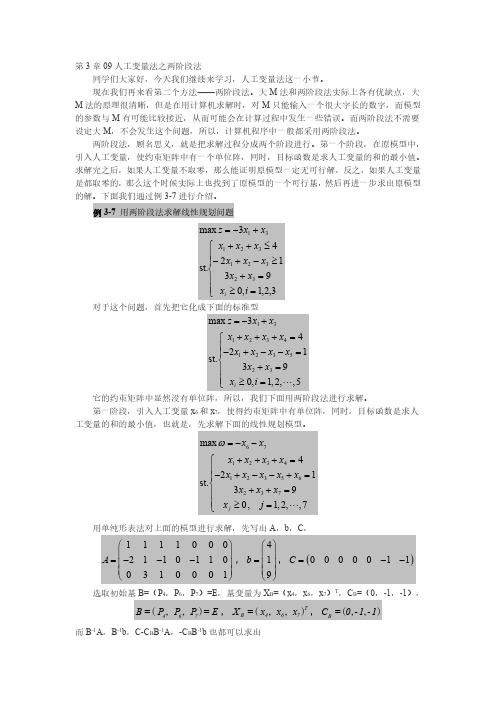
例3-7用两阶段法求解线性规划问题⎪⎪⎩⎪⎪⎨⎧=≥=+≥-+-≤+++-=3,2,1,093124st.3max 3232132131i x x x x x x x x x x x z i 对于这个问题,首先把它化成下面的标准型131234123523max 3421st.390,1,2,,5i z x x x x x x x x x x x x x i =-++++=⎧⎪-+--=⎪⎨+=⎪⎪≥=⎩ 它的约束矩阵中显然没有单位阵,所以,我们下面用两阶段法进行求解。
第一阶段,引入人工变量x 6和x 7,使得约束矩阵中有单位阵,同时,目标函数是求人工变量的和的最小值,也就是,先求解下面的线性规划模型。
67123412356237max 421st.390,1,2,,7j x x x x x x x x x x x x x x x j ω=--+++=⎧⎪-+--+=⎪⎨++=⎪⎪≥=⎩ 用单纯形表法对上面的模型进行求解,先写出A ,b ,C ,111100021101100310001A ⎛⎫ ⎪=--- ⎪ ⎪⎝⎭,419b ⎛⎫⎪= ⎪ ⎪⎝⎭,()0000011C =--选取初始基B=(P 4,P 6,P 7)=E ,基变量为X B =(x 4,x 6,x 7)T ,C B =(0,-1,-1),467B =P P P =E (,,),TB 467X =x x x (,,),BC =0-1-1(,,)而B -1A ,B -1b ,C-C B B -1A ,-C B B -1b 也都可以求出1B A A -=,1B b b -=,()()111110000000011(0,1,1)21101100310001 2400100B C C B A -⎛⎫ ⎪-=-------- ⎪⎪⎝⎭=--14(0,1,1)1109B C B b -⎛⎫ ⎪-=---= ⎪ ⎪⎝⎭这时就得到了下面的初始单纯形表。
3.12 4单纯形法(人工变量法)3.12
一个x12方x程12把中x第去2x二2个x方5x程3直接x加4
4 6
x1 , x一2个, 变x3量,(人x4工, 变x量5 ) 0
规范化
考虑一般问题:
bi > 0 , i = 1 , … , m
Max Z = c1 x1 + c2 x2 + … + cn xn a11 x1 + a12 x2 + …+ a1n xn = b1 a21 x1 + a22 x2 + …+ a2n xn = b2 … am1 x1+ am2 x2+…+ amn xn = bm
jm 1 j j
i1 i
i
j m 1 ij j
m
n
m
c b (c c a )x
i1 n i i
jm 1
j
i 1 i ij
j
n
Z (c z )x
0
j 1
j
j
j
n
Z C jx
0
j 1
j
其 Z m c 中 b ,C j c z ,z m c a
一、单纯形法的基本原理
(一)基本变量: 如果变量xj在某一方程中系数为1,而在其它一切方
程中的系数为零,则称xj为该方程中的基本变量。否则 为非基本变量。 (二)基本解:
在典型方程中,设非基本变量为零,求解基本变量 得到的解,称为基本解 。 (三)基本可行解:
基本变量为非负的一组基本解称为基本可行解 。
(2)最优解判别 如果任何一个非基变量的值增加都不能
使目标函数值增加,即所有检验数非正,则 当前的基本可行解就是最优解,计算结束。
单纯形法-人工变量法
max z=3x1+4x2 x1 +x2 40
2x1+x260 x1-x2 =0 x1 ,x2 0
cj →
CB XB b 0 x3 40 0 x4 60 -M x5 0
cj- zj
0 x3 40 0 x4 60 3 x1 0
cj- zj 4 x2 20 0 x4 0 3 x1 20
3 40
x1 x2 x3 1 11 2 10 [1] -1 0
例 max z=3x1+5x2 3x1 +5x2 15 2x1 + x2 5 2x1+2x2 11 x1 ,x2 0
CB XB b
0 x3 15 0 x4 5
0 x5 11
cj-zj
5 x2 3 0 x4 2 0 x5 5
cj-zj
3 50 00 x1 x2 x3 x4 x5 3 [5 ] 1 0 0 2 1010 2 2001 3 5000 3/5 1 1/5 0 0 7/5 0 -1/5 1 0 4/5 0 -2/5 0 1
4 2
x1 x1
x2
2
x3 x3
x5 x6 3 x7 1
x1 , , x7 0
这时,初始基和初始基可行解很明显。X(0)=(0,0,0, 11,0,3,1)T不满足原来的约束条件。如何使得可从 X(0)开始,经迭代逐步得到x6=0,x7=0 的基可行解, 从而求得问题的最优解,有两种方法:
• 两种方法
– 大M法 – 二阶段法
约束方程为“>=”或“=”的情形(加人工变量)
标准型:
min z =-3x1+x2+x3
x1 2 x2 x3 11
1-5 单纯形法的进一步讨论

大M法
在一个线性规划问题的约束条件中加入人 工变量后, 工变量后 , 要求人工变量对目标函数的取 值无影响, 为此可取人工变量在目标函数 值无影响 , 中的系数为-M(M为非常大的正数 ,这样目 为非常大的正数), 中的系数为 为非常大的正数 标函数要实现最大化, 人工变量只能取零, 标函数要实现最大化 , 人工变量只能取零 , 因此必须把人工变量从基变量中换出, 因此必须把人工变量从基变量中换出 , 否 则目标函数就不可能实现最大化。 则目标函数就不可能实现最大化。
两阶段法的算法流程图
MaxZ=-3x1+x3 x1+ x2+ x3≤4 -2x1+ x2- x3≥1 3x2+x3=9 xi ≥0,j=1,2,3
求解辅助问题,得到辅助 问题的最优解 引进人工变量x6,x7,构造辅助 问题,辅助问题的目标函数为 所有人工变量之和的极小化
MaxW=-x6-x7 x1+ x2+ x3+x4 =4 -2x1+ x2-x3 -x5+x6 =1 3x2+x3 +x7=9 xi ≥0,j=1,…,7
X B X = 同理将 写成分块矩阵 同理将C写成分块矩阵 (CB,CN), 写成分块矩阵C=( X N
CB=(C1,C2,…,Cm), CN=(Cm+1Cm+2,…,cn) 则AX=b可写成 , 可写成
X B (B, ) = BX B + NXN = b N X N
CB 0 0 -3 0 0 1
bi 0 3 1 0 5/2 3/2
θ 9 3/2
3/2 x3入,x1出 -1/2 -1/4 3/4 -3/4
所以:X*=(x2,x3,x4)T=(5/2,3/2,0)T Z*=3/2 所以:
管理运筹学-复习整理
一线性规划图解法1.线性规划的标准形式:(1)目标函数最大;约束条件等式;决策变量非负(x≥0);资源限量非负(b≥0)。
(2)图解法两个变量系数C1、C2,斜率k=-(C1/C2)(3)图解法K≥0时,绝对值越大越靠近Y轴;K≤0时,绝对值越大越靠近Y轴。
(4)阴影区:无论斜率为正或负,小于的部分阴影区都在线的下方。
二单纯形法1.大M法(1)加入人工变量-Mx i…,M无穷大。
(2)最后将人工变量x i替换出去,且σ≤0.2.两阶段法(1)第一阶段:目标函数为max z′=−x i…,得到最终表。
(2)第二阶段:目标函数替换为原目标函数,在最终表里继续计算σ,直到都小于等于0。
3.单纯表特殊情况的解判断(1)最优解中人工变量大于0,线性规划无解。
(2)某次迭代过程,表中有一个σ>0,且该列系数向量都小于等于0,线性规划无界。
(因为比较比值大小时都是负的)。
(3)某个非基变量σ=0,无穷解。
(4)退化问题:相同的比值,选择下标大者离基。
σk相同,任选一个入基。
4.初等行变换✓某一行(列),乘以一个非零倍数。
✓某一行(列),乘以一个非零倍数,加到另一行(列)。
✓某两行(列),互换。
三单纯形法灵敏度分析1.对偶问题原问题:max z=cx对偶问题:min f=b T yAx≤b A T y≥c TX≥0 y≥0(1)原问题统一为以上标准型,再进行下一步。
(2)原问题第i个约束条件等号,对偶问题i个决策变量无约束。
(3)原问题第i个决策变量无约束,对偶问题第i个约束条件等号。
(4)原问题的对偶价格为对偶问题的最优解。
(参考习题册第7、19题)(5)对偶价格:常数项增加1单位,目标函数值改进的数量。
(6)影子价格:常数项增加1单位,目标函数值增加的数量。
2.灵敏度分析(1)目标函数变量系数C k:将C k直接代入最终表,判断σ是否小于0。
(2)约束方程常数项b:利用如下公式计算新的最终表中b值。
判断b是否非负。
运筹学5人工变量及其处理方法

min w = x6 + x7
max w' = − x6 − x7
= 11 x1 − 2 x2 + x3 + x4 − 4 x + x + 2 x − x5 + x6 =3 1 2 3 s.t. + x3 + x7 = 1 − 2 x1 x j ≥ 0 ( j = 1,2,3L7)
计算机计算时,必须对 给出一个具体数值 给出一个具体数值, 计算机计算时,必须对M给出一个具体数值,通常 计算时 取比原问题中最大数据高 最大数据高1~2个数量级的数值。并视 个数量级的数值 取比原问题中最大数据高 个数量级的数值。 求解情况对M作适当调节 作适当调节。 求解情况对 作适当调节。
例:用大M法求解LP 求解LP
两阶段法的第一阶段求解的目的: 两阶段法的第一阶段求解的目的: 目的
1.判断原LP有无可行解。 判断原 有无可行解 有无可行解。 判断 2.若有,则可得原LP的一个初始基本可行解,再 若有,则可得原 的一个初始基本可行解, 的一个初始基本可行解 若有 对原LP进行第二阶段的计算 进行第二阶段的计算。 对原 进行第二阶段的计算。
初始可 行基
B
(0)
= ( p4
p6
p7 ) = I 3
初始基本 可行解
(0
0 0 11 0 3 1)
T
初始单纯形表
[ ]
11 3 2 1
[ ]
/ 1 /
0
人工变量x 已从基变量中换出。 人工变量 6,x7已从基变量中换出。
第二阶段: 第二阶段:
x1 − 2 x2 + x3 + x4 − 4 x + x + 2 x − x5 1 2 3 s.t. + x3 − 2 x1 x j ≥ 0 ( j = 1,2,3L5)
初始可行基的求法——人工变量法

2x1 x2 4 3x1 x2 1 x1, x2 0
max z1 2x1 3x2 M (x5 x6 )
2x1 x2 x3 x5 4
3x1 x2
x4 x6 1
x1,, x6 0
cj
CB XB
-M x5 -M x6
σj
-M x5
3
退化解出现的原因是模型中存在多余的 约束,使多个基可行解对应同一顶点。当出 现退化解时,有可能出现迭代计算的循环, 但可能性极其微小,为避免循环,可取下标 较小的变量换出。
8(4)先用大M法,再用两阶段法 求解LP问题:
min z x1 3x2 4x3 3x4
3x1 6x2 x3 2x4 15 6x1 3x2 2x3 x4 12 x1, x2 , x3 , x4 0
11
4x1 2x1
x2
2x3 x3
x5 x6 3 x7 1
x1,, x7 0
cj
0
0
0
0
0
1
1
CB
XB
b
x1
x2
x3
x4
x5
x6
x7
0
x4
11
1
-2
1
1
0
0
0
1
x6
3
-4
1
2
0
-1
1
0
1
x7
1
-2
0 [1] 0
0
0
1
σj
6
-1
-3
0
1
0
0
0
x4
10
3
-2
0
1
0
0
1-5 单纯形法的进一步讨论

B 1b B 1NX N
令非基变量XN=0,XB=B—1b,由 B是 可行基的假设,则得到
基本可行解
X=(B-1b,0)T
将目标函数写成
Z
(CB
,
CN
)
X X
B N
CB X B
CN X N
CB (B1b B1NX N ) CN X N
CBB1b (CN CBB1N )) X N
MaxZ=-3x1+x3 x1+ x2+ x3≤4
-2x1+ x2- x3≥1 3x2+x3=9
xi ≥0,j=1,2,3
求解辅助问题,得到辅助 问题的最优解
引进人工变量x6,x7,构造辅助 问题,辅助问题的目标函数为
所有人工变量之和的极小化
MaxW=-x6-x7
x1+ x2+ x3+x4
=4
-2x1+ x2-x3 -x5+x6 =1
z zσ
XB … 0T …
xj cj - zj
… RHS … z0
XB xB I …
Yj
…b
基变量在目标函数中的系数等于0, 基变量在约束条件中的系数是一个单位矩阵
单纯形表的结构
注意: Z行中有m 个0,它们与基变量相对应。一般情况下,这m 个0分散在Z行的各列中,并与基变量相对应。
其余m行中有一个m阶单位矩阵I,其各列与基变量相对应。 一般情况下,组成I的各列分散在表的各列中,它们与基变 量相对应。
X1 1
0
a1
0
a2 a6
X2 0
1
1
0
-2
运筹学-6人工变量法
唯一最优解的判断:最优表中所有非基变量的检验数非零,则线 规划具有唯一最优解
多重最优解的判断:最优表中存在非基变量的检验数为零,则 线则性规划具有多重最优解.
无界解的判断: 某个λk>0且aik≤0(i=1,2,…,m)则线性规 划具有无界解
无可行解的判断:当用大M单纯形法计算得到最优解并且存 在Ri>0时,则表明原线性规划无可行解。 退化基本可行解的判断:存在某个基变量为零的基本可行解。
§1.6人工变量法
Ch1 Linear Programming
The Artificial Variable Method 2020年6月20日星期六 Page 3 of 8
3
2
-1
0
0
-M -M b
x1
x2
x3
x4
x5
-4
3
1
-1
0
1
-1
2
0
1
2
-2
1
0
0
3-2M 2+M -1+2M↑ -M
0
x6
10 x3
1
x1、x2、x3 0
§1.6人工变量法 The Artificial Variable Method
【解】首先将数学模型化为标准形式
Ch1 Linear Programming
2020年6月20日星期六 Page 2 of 8
max Z 3x1 2x2 x3
4x1 3x2 x3 x4 4
x1
x2
2x3
x5
10
2x1 2x2 x3 1
x j 0, j 1,2, ,5
式中x4,x5为松弛变量,x5可作为 一个基变量,第一、三约束中分 别加入人工变量,x6、,x7,目标 函数中加入―MR6―MR7一项,得 到人工变量单纯形法数学模型
§43 人工变量法
0
0
LPⅡ min z 3 x1 2 x2 x3 Mx6 Mx7
2 2 1 0 0 0 1
4 x1 3 x2 x3 x4 x6 4
x1
x2
2 x3
x5
10
2
x1
2 x2
x3
x.7
1
x j 0, j 1, , 7
3
2
0
0
1 2
3
得 LPⅠ 的基础可行解:
2 x 0
0
可行基: B1 ( p1 , p2 , p5 )
3 2
计算 :b00 和 b0i 的数据.
建立 LPⅠ对应基 B1 的单纯形表。
例2
用两阶段法解线性规划问题:
min S 4x1 3x3
0
LPⅡ
x1
x2 x4 3
x1
,
x2 ,
x3 ,
x4
0
min z x1 2x2 Mx5
1 2 1 0 1
A
1
0
0
1
0
x1 2x2 x3 x5 4
x1
x2
x4 1
x1
,
x2 ,
x3 ,
x4 ,
取初始可行基
B (P6 , P5 , P7 ) E cB (c6 , c5 , c7 ) ( M , 0, M ),
计算: CBb CB A C
单纯形法

-M X6 0 1 0 0 0 1
-M X7 0 0 1 0 -1 -2 1 θ 11 3/2 1
-1
X3 cj-zj
1
-2 -1
0 -1+M
0 1 0 0
1 0
0 0 1 0
0 0
1 0 0 0
0 -M
-2 -1 0 -1
0 0
2 1 0 -M+1
1 1-3M
-5 -2 1 -M-1
-
0 -1 -1
人工变量
第2页
cj CB 0 -M -M XB X4 X6 X7 cj-zj b 11 3 1
3 X1 1 -4 -2 3-6M
-1 X2 -2 1 0 -1+M
-1 X3 1 2 1 -1+3M
0 X4 1 0 0 0
0 X5 0 -1 0 -M
-M X6 0 1 0 0
-M X7 0 0 1 0 θ
2 1 0 -M+1
1 1-3M
-5 -2 1 -M-1
-
0 -1 -1
X4 X2 X3 cj-zj
12 1 1
3 0 -2 1
4 -
第14页
cj CB 0 -1 -1 XB X4 X2 X3 cj-zj 3 X1 4 b 12 1 1
3 X1 3 0 -2 1 1
-1 X2 0 1 0 0 0
-1 X3 0 0 1 0 0
-1 X3 1 2 1 -1+3M 0 0 1 0 0 0
0 X4 1 0 0 0 1 0 0 0 1 0
0 X5 0 -1 0 -M 0 -1 0 -M -2 -1
-M X6 0 1 0 0 0 1 0 0 2 1
3线性规划人工变量法解析

1
0 0 0 1 0 0 2 5/3 2/3 -25/3
0
0 0
8/3
—— —— 31/3 ——
j
x2 x5 x3 x2 x1 x3
x3
→
j
j
单纯形法的进一步讨论-两阶段法
用计算机处理数据时,只能用很大的数代替M,可能造成 计算机上的错误,故多采用两阶段法。 第一阶段: 在原线性规划问题中加入人工变量,构造如下模型:
-M
-M Z 0
x6
x7
3
1 -4M
-4
-2 3-6M 3
1
0 -1+M -2
2
1 -1+3M 0
0
0 0 1
-1
0 -M 0
1
0 0 0
0
1 0 -1
3/2
1
→ →
x4
10
-
-M
-1 Z
x6
x3
1
1 -M-1
0
-2 1
1
0 -1+M
0
1 0
0
0 0
-1
0 -M
1
0 0
-2
1 -3M+1
1
-
单纯形法的进一步讨论-人工变量法
单纯形法的进一步讨论-人工变量法
故人为地添加两个单位向量x6和x7 ,得到含人工变量的单纯形 法数学模型:
max Z 3x1 x2 x3 +0x4 +0x5-Mx6 Mx7
3 x1 x2 x3 x4 4x x 2 x 1 2 3 x3 2 x1 x j 0, j 1, 2, L , 7
-
1.5 人工变量法

第五节 人工变量法
单纯形表是从一个初始基可行解开始的,如果在线性规 划问题的系数矩阵中不存在一个 m 阶单位矩阵,也即很难找 到一个初始可行基怎么办? 例1:
MaxZ 3 x1 x 2 x3 x1 2 x 2 x3 11 4 x x 2 x 3 1 2 3 2 x1 x3 1 x1 , x2 , x3 0
引进人工变量 x6 , x7 ,构造辅助 问题,辅助问题的目标函数为 所有人工变量之和的极小化
MaxZ x6 x7 11 x1 2 x2 x3 x4 4 x x 2 x x x 3 1 2 3 5 6 x7 1 2 x1 x3 x1 , x2 ,..., x7 0
停止
循 环
是
无界解
bi 计算 i ( a lk 0) a lk
15
用非基变量 替换基变量
xk xl
列出下一个 新单纯形表
OR:SM
E-mail:lijun@
16 OR:SM
做一下,看你理解了没有?
• 1、用大M法求解Max型线性规划问题时,人工变量在目 标函数中的系数均为( -M),若最优解的(基变量)中 含有人工变量,则原问题无解。 • 2、两阶段法比大M的优点是(不用M),主要是方便用 计算机求解。 • 3、对非典式线性规划问题,用单纯形法求解时,通常通 过(添加人工变量)构造初始可行基。
0
M
根据上表列出初始单纯形表 A
14 OR:SM
线性规划小结
A
求 : j cj z j
所有 j 0
否
循环
是
基变 量中是否 含有 x a
人工变量法和两阶段法
x1 , x2 0
1 1 A 5 2
2 6
90 b 490
240
C 6 8
它的对偶问题是:
这里Y y1, y2, y3
minW Y 90 490 240T
minW 90 y1 490 y2 240 y3
在单纯形迭代过程中,要求人工变量逐步从基 变量被替换出,变为非基变量,最后,基变量中不 含有人工变量。
为使人工变量被替换出成为非基变量,有 1.大M法 2.两阶段法
1.大M法:在目标函数求最大值的线性规划问题中, 设人工变量在目标函数中的系数为-M,M为任意大 的正数。只要人工变量不为零,目标函数最大值就 是一个任意小的数。
s.t .
y1 4 y2
2
2 y1
4 y3 3
y1 , y2 , y3 0
4.2.2 一般形式的线性规划模型与对偶模型之间的关系 对于非对称形式的线性规划模型如何写出其对
偶模型? 其思路是首先将非对称形式转换为对称形式,然
后再按照对应关系写出其对偶模型。
原问题求极小------ min Z maxZ
x1 x1
a22 x2 a32 x2
a23 x3 a33 x3
b2 b3
x1 0, x2 0, x3无约束
(4 9)
原问题约束方程有“=”,如何转化?
(1)将约束条件2的等式约束转化为两个不等式约束
a21 x1
a22 x2
a23 x3
b2
a210,x3
0,x3
0
对称 形式 线性 规划 模型 的对
§4.3 人工变量法

1 1 − 1 0 0 1 0 AII = −1 1 0 − 1 0 0 1 0 1 0 0 1 0 0
max z = − x1 + 2 x2
例1
用两阶段法解线性规划问题 用两阶段法解线性规划问题:
x1 + x 2 − x3 = 2 − x + x − x = 1 1 2 4 x2 + x5 = 3 x j ≥ 0, j = 1,...,5
LPⅠ min z ′ = x1 − 2 x2 Ⅰ
4 10 1
-4 1 2
3 -1 -2
0 1 0
1 0 0
0 0 1
−r3
−2r3
Q λ2 = M + 2 > 0
λ3 = 2 M − 1 > 0
定 x3 进基 x1 x2
5M
4 10 1 1 Q min , , = 1 2 1 1
定 x7 出基 x6
0
x3
0
x4
-M
x5
0
x7
1-2M
与大M法同样引入人工变量,分两阶段做: 与大 法同样引入人工变量,分两阶段做: 法同样引入人工变量 个人工变量, 第一阶段: 引入m个人工变量 第一阶段: 引入 个人工变量,建立辅助问题并求解 目标函数是: 目标函数是: min w = ∑ Ri 全体人工变量之和. i 约束条件是: 约束条件是: 加入人工变量后的约束方程.
使人工变量对应的系数列向量与其他变量的系数列向量 共同构成一个单位矩阵.作为初始基 作为初始基。 共同构成一个单位矩阵 作为初始基。 出基 为了求得原问题的初始基础可行解, 为了求得原问题的初始基础可行解, 通过迭代过程把人工变量从基变量中替换为非基变量. 必须尽快通过迭代过程把人工变量从基变量中替换为非基变量 为此,可以在目标函数中赋予人工变量一个任意大的正系数M. 为此,可以在目标函数中赋予人工变量一个任意大的正系数 任意大的正系数 写出LPⅡ 用表格单纯形法解, 人工变量换出基。 写出 Ⅱ,用表格单纯形法解,将人工变量换出基。 只要基变量中还存在人工变量,目标函数就不可能实现极小化. 人工变量, 原问题没有可行解。 若LPⅡ的最优解中仍有人工变量,则说明原问题没有可行解。 Ⅱ的最优解中仍有人工变量 则说明原问题没有可行解 原方程组 Ax=b 不成立 人工变量, 若LPⅡ的最优解中没有人工变量, Ⅱ的最优解中没有人工变量 LPⅠ Ⅰ 则去除人工变量即为原问题的基础可行解 继续求最优。 原问题的基础可行解。 则去除人工变量即为原问题的基础可行解。继续求最优。
大m法的设计原理
大m法的设计原理大M法(Big M Method)是一种用于解决线性规划问题的常用算法。
它是在单纯形法的基础上进行了扩展和改进,使得原本不满足约束条件的线性规划问题也能够得到解决。
下面我将详细介绍大M法的设计原理。
大M法的设计原理可以总结为以下几个方面:引入人工变量、添加人工目标函数、设置初始基可行解以及进行迭代求解。
首先,大M法通过引入人工变量来扩展原始的线性规划问题。
当问题存在约束条件的右端常数项且为负数时,即不满足非负性约束条件时,为了使其满足约束条件,需要引入人工变量,其系数为-1。
引入人工变量后,原问题可以转化为等价的标准型线性规划问题。
其次,为了将原问题转化为一个标准型的线性规划问题,大M法需要添加人工目标函数。
人工目标函数的目的是为了把人工变量迅速退掉,从而得到一个可行解。
人工目标函数的系数取M(一个足够大的正数),通过最小化目标函数来实现对人工变量的快速退掉。
然后,大M法需要设置一个初始基可行解。
一个线性规划问题的基可行解是一个满足约束条件的解,可以通过将一些变量设置为0,从而满足约束条件。
初始基可行解的选取对于算法的求解速度和结果的质量有着重要的影响。
最后,大M法利用迭代的方法求解线性规划问题。
它通过不断地进行基的调整和目标函数优化来逐步找到最优解。
具体的迭代步骤包括选择入基变量和选择出基变量,通过增加或减少基变量的值来优化目标函数的值,直到找到最优解或确定问题无解为止。
在大M法的求解过程中,还需要注意一些技巧和细节。
例如,在进行基变换时,需要找到使目标函数值减小的变量作为出基变量。
同时,如果人工目标函数等于0,则说明找到了初始的基可行解;如果人工目标函数小于0,则说明原问题无解。
总之,大M法通过引入人工变量、添加人工目标函数、设置初始基可行解以及进行迭代求解,能够解决不满足约束条件的线性规划问题。
它是一种有效的算法,在实际应用中得到了广泛的应用和验证。
同时,对于一些特殊情况,如无界解或无可行解等,大M法也能够进行相应的判断和处理。
华南理工大学 运筹学 第2章 线性规划的单纯形解法-2 工商管理学院
线性规划的单纯形解法
1
单纯形法的扩展
1-目标函数为求最小值的问题
2
单纯形法的扩展
1-目标函数为求最小值的问题
3
单纯形法扩展的示例1
例2-8
Z = 3x1 + 5x2 x1 £4 x2 £ 6 3x1 + 2 x2 £ 18 x1 , x2 ³ 0
min W 3x1 5 x2 s.t. x1 4 x2 6 3x1 2 x2 18 x1 , x2 0
21
改进单纯形法
单纯形表法 示意
22
改进单纯形法
单纯形表法 示意
23
改进单纯形法
单纯形表法 示意
24
改进单纯形法
2- 单纯形法迭代计算的矩阵形式算法描述
定义CN = CN - CB B-1 N为非基变量XN的检验向量 Z CB B-1b + CN XN
25
改进单纯形法
2-单纯形法迭代计算的矩阵形式算法描述
初始基变量组合XB ( x4 , x5 )
T
s.t.
8 x1 4 x2 5 x3 x4 2 x1 2 x2 x3 x1 , x2 , x3 , x4 , x5 0
320 x5 100
1 0 -1 B (p 3 ,p 4 ) B 0 1 1 -1 c1 c1 CB B p1 5 (0, 0) 0 1 -1 c2 c2 CB B p 2 4 (0, 0) 0 1 -1 c3 c3 CB B p 3 2 (0, 0) 0
min W = x6 + x7 s.t. Þ x1 - 2 x2 + x3 + x4 -4 x1 + x2 + 2 x3 - 2 x1 + x3 - x5 + x6 =11 =3 + x7 = 1
人工变量法和大M法

解: 引进人工变量x4,x5,于是得下述问题
max f 3 x1 x 2 2 x 3 Mx 4 Mx 5 6 3 x1 2 x 2 3 x 3 x 4 s .t x1 2 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 0
13
第一阶段迭代过程如下:
常数 -g x4 x5 -g x4 x5 -g x1 x5 -g x1 x3 6 4 10 6 4 2 2 2 0 3 1 x1 0 3 1 4 3 1 0 1 0 0 1 0 x2 0 2 -2 0 2 -2 -2 2/3 2/3 -2 2/3 0 - 2/3 -1 1/3 x3 0 -3 1 -2 -3 1 2 -1 2 0 0 1 1/6 - 1/6 x4 -1 1 0 0 1 0 -1 1/3 1/3 - 1/3 -1 x5 -1 0 1 0 0 1 0 0 1 -1 1/2 1/2
17
4
一、大M法 这种方法就是在目标函数中加上一个惩罚因素M 作为人工变量的系数,其值可以无穷大,即
min f 10 x1 8 x 2 7 x 3
Mx 6
x4 x6 6 2 x1 x 2 s .t x1 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 , x 6 0
min
f 10 x1 8 x 2 7 x 3
6 2 x1 x 2 s .t x1 x 2 x 3 4 x1 , x 2 , x 3 0
1
化成标准形后为:
min f 10 x1 8 x 2 7 x 3 x4 6 2 x1 x 2 s .t x1 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 0
线性规划的人工变量法(NO6)
-1/2
Байду номын сангаас
1 0 1/2 -3/2 -1/2
3/2
0
0
-1/4
-3/4
1M 4
3M 4
6
第二次迭代
cj
CB
XB
b
M
x2
1/2
M
x1
3/2
1
1.5
0
0M
M
x1
x2
x3
x4
x5
x6
0
1
-1/2 1/2 1/2 -1/2
1
0
1/2 -3/2 -1/2
3/2
-W
9/4
0
0
-1/4
-3/4 1 M 3 M
M
x6
-W
1
1.5
0
0
b
x1
x2
x3
x4
1
1/3
1 -1/3 0
1
[2/3] 0 1/3 -1
M3 2
2M 1 32
0
M 1 32
M
M
M
x5
x6
1/3
0
-1/3
1
4M 1 0 32
第二次迭代
cj
CB
XB
b
M
x2
1/2
M
x1
3/2
-W
9/4
1 1.5 0
0
M
M
x1
x2
x3
x4
x5
x6
0 1 -1/2 1/2 1/2
这样,新问题将有一个初始基可行解(以人工变量为基 变量),可用单纯形法进行迭代。经迭代后,若人工变量 全部被换成非基变量,即人工变量全部出基,则得到原问 题的一个基可行解。
0920__第四次课_大M法
CT x CT x MET y
0
0 10 满 但
12
3
0
1
0 15 足 ③
①不
21
5
0
0
1 20 ② 满
-1 -2 -3 1 M M 0
足
12
1
1
0
0 10 满 但
1
2
3
0
1
0
15
足④ ①不
21
5
0
0
1 20 ② 满
③足
-2-3M -4-3M -4-8M 0 0 0 0
Page 21
12
1
1
0
0 10 满 但
12
3
0
1
0 15 足 ④
是原LP问题的最优解. 若 y ( y1 , y2 ,L , ym ) 0, 则原LP问题无最优解.
6)新LP无界(无最优解),则原LP问题也无最优解. 说明:在上面5)中提到的 y 0 的情况属于下面情形:
用单纯形法求解新LP得到的新表格满足① ② ③ ④, 但人工变量并没有完全成为自由变量。此时说明 原LP问题是无可行解,因此原LP无最优解.
令y ( xn1 , xn2 ,L , xnm )T , E (1,1,L ,1)T
Page 7
min z CT x MET y
Ax y b
s.t .
x
0,
y0
L L (4.2)
人工变量全 是自由变量
定理4.1 设( x* , y* )T是(4.2)的最优解. 若 y* 0, 则x*是(4.1) 的最优解;若 y* 0, 则(4.1)没有可行解.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
一、大M法 这种方法就是在目标函数中加上一个惩罚因素M 作为人工变量的系数,其值可以无穷大,即
10
二、两阶段法 引进人工变量来求解的一个目标是在找到第一 个基可行解的同时去掉人工变量,因此我们可以考 虑第一阶段的目标是求函数g(x)的最小值.1、如果 在求得第一阶段最小值时能去掉人工变量(即人工 变量全部为非基变量),则可以此时的可行基进入第 二阶段,否则 2、由于有人工变量仍为基变量,则原LP问题就无 最优解. 第二阶段,在第一阶段已求得的可行基上,去掉约束中 的人工变量(因为人工变量全是非基变量),将基变 量去消原来的目标函数中的元,继续单纯形法求解.
7
初始单纯形表
常数 x1 x2 x3 x4 x5
f x4 x5
0 6 4
3 3 1
-1 -2 -2
-2 -3 3
-M 1 0
-M 0 1
8
用单纯形法迭代如下:
常数 f x4 x5 0 6 4 -6 x1 3 3 1 0 x2 -1 2 -2 -3 x3 -2 -3 1 1 x4 -10000 1 0 -10001 x5 -10000 0 1 -10000
1
化成标准形后为:
min f 10 x1 8 x 2 7 x 3 x4 6 2 x1 x 2 s .t x1 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 0
该问题的初始可行基不是一下就能看出的. 经观察,可知,如果在第一个式子加一个非负 变量x6,则可以和x3构成一个可行基.
2
min f 10 x1 8 x 2 7 x 3 x4 x6 6 2 x1 x 2 s .t x1 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 , x 6 0
3
这个在等式上增加的非负变量被称为人工变 量,由此得到的基被称为人造基.相应的基解就 称为人造基解.
x2 x3 1
用单纯形法继续求解,过程如下:
15
先消去目标函数中的基变量,就得到第一张单纯形表, 再从这张单纯形表继续.
常数 f 0 x1 3 x2 -1 x3 -2
x1
x3
3
1
1
0
- 2/3
-1 1/3
0
1
f
x1 x3
-7
3 1
0
1 0
-1 2/3
- 2/3 -1 1/3
0
0 1
16
至此,检验数全部非正,因此得原LP问题的最优 解 x=(3,0,1)T,目标函数的最大值为7.
14
从第一阶段的结果看,由于最优解的基变量里不 含人工变量,就可以去掉函数g和人工变量,以x1和 x3作为可行基来解原来的LP问题. 于是有
max s .t f 3 x1 x 2 2 x 3 2 3 x2 4 3
x1
3 x1 , x 2 , x 3 0
17
min f 10 x1 8 x 2 7 x 3
Mx 6
x4 x6 6 2 x1 x 2 s .t x1 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 , x 6 0
迭代的目标就是要去掉目标函数中的大M,否则由于 -M充分地小,目标函数就无法达到最优.
第一阶段,先解问题
12
min g x 4 x 5 6 3 x1 2 x 2 3 x 3 x 4 s .t x1 2 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 0
化为标准形,则为
max g x 4 x 5 6 3 x1 2 x 2 3 x 3 x 4 s .t x1 2 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 0
13
第一阶段迭代过程如下:
常数 -g x4 x5 -g x4 x5 -g x1 x5 -g x1 x3 6 4 10 6 4 2 2 2 0 3 1 x1 0 3 1 4 3 1 0 1 0 0 1 0 x2 0 2 -2 0 2 -2 -2 2/3 2/3 -2 2/3 0 - 2/3 -1 1/3 x3 0 -3 1 -2 -3 1 2 -1 2 0 0 1 1/6 - 1/6 x4 -1 1 0 0 1 0 -1 1/3 1/3 - 1/3 -1 x5 -1 0 1 0 0 1 0 0 1 -1 1/2 1/2
x1
x5 f x1 x3
2
2 -7 3 1
1
0 0 1 0
2/3
-2 2/3 -1 2/3 - 2/3 -1 1/3
-1
2 0 0 1
1/3
- 1/3 -10000 5/6 1/6 - 1/6
0
1 -10000 1/2 1/2 1/2
9
迭代到此,可以看到,所有的检验数非正,已 得问题的最优解,即当x1=3,x3=1,x2=x4=x5=0 时目标函数取最大,目标函数最大值为7. 因为人工变量全为0,即可将人工变量删去, 即得原问题的最优解为:x1=3, x2=0,x3=1 目标函数最大值为7. 注意,如果由大M法得到的最优解中含有人工 为基变量,则说明原LP问题无最优解. 另外,本例可以只在第一个线性约束加人工变 量x4,因为第二个线性约束有一个x3,系数为 正,且第一个线性约束无此变量.
1.4 单纯形法的进一步讨论
一、人工变量法 从前面的例子很容易看到,若LP问题的线性约束的 关系不全是’≤’,则第一个可行基就不那么好找 了.比如, 例7
min x 2 s .t x1 x 2 x 3 4 x1 , x 2 , x 3 0
11
例如对问题:
max f 3 x1 x 2 2 x 3 3 x1 2 x 2 3 x 3 6 s .t x1 2 x 2 x 3 4 x1 , x 2 , x 3 0
解 引入人工变量 x4和x5后,按两阶段来 解,则第一阶段先解如下问题.
5
具体做的时候,所有的人工变量前统一的一个大M.
• 例8 用大M法求解下 述LP问题
max
f 3 x1 x 2 2 x 3
3 x1 2 x 2 3 x 3 6 s .t x1 2 x 2 x 3 4 x1 , x 2 , x 3 0
6
解: 引进人工变量x4,x5,于是得下述问题
max f 3 x1 x 2 2 x 3 Mx 4 Mx 5 6 3 x1 2 x 2 3 x 3 x 4 s .t x1 2 x 2 x 3 x5 4 x1 , x 2 , x 3 , x 4 , x 5 0
用单纯形法来解,过程如下: