C·A上传 【理论力学】第十一章 动能定理
理论力学-11-动能定理及其应用
F FN
0
F
滑动摩擦力做负功!
O
M
C
又滚又滑
11.1.2 各种力做功的计算
约束力的功
只滚不滑 纯滚动时,静滑动摩擦力 (约束力)作功为零!
vO
O
C* FN
F
WF F drC F vC dt
0
11.1.2 各种力做功的计算
约束力的功
理想约束:
约束力作功等于零的约束。 ◆ 不可伸长的柔索约束 ◆ 光滑的固定支承面 ◆ 光滑铰链: 轴承、滚动铰支座 ◆ 纯滚动时的静摩擦力
例题2
分别选轮和物体为研究对象?
FOy
圆轮:
1 T2 J O 2 2
T1 0
FT R
O
FOx
T2 T1 W12
物体:
T1 0
T2 1W 2 v 2 g
mg
FT
F'T
Ws FT s
P v W
11.3 动能定理及其应用
例题3
l-b
b
一长为 l , 质量密度为 ρ 的链条放置在光滑的水 平桌面上,有长为b的一段 悬挂下垂,如图。初始链 条静止,在自重的作用下 运动。 求:当末端滑离桌面时, 链条的速度。
1 2 1 2 mv2 mv1 W12 2 2
1 2 d( mv ) δW 2
11.3 动能定理及其应用
质点系
1 2 微分形式: d T d ( mi vi ) Fi d ri δ Wi 2
1 1 2 2 m v - m v 积分形式: i i2 i i1 W12 i 2 i 2 i
3 2 T mvC 4
《理论力学》课件 第十一章
第十一章动量定理动量定理、动量矩定理和动能定理统称为动力学普遍定理.§11--1 动量与冲量1、动量的概念:产生的相互作用力⑴定义:质点的质量与速度的乘积称为质点的动量,-----记为mv。
质点的动量是矢量,它的方向与质点速度的方向一致。
kgms/单位)i p v 质点系的动量()i i i i c im r m r r m m ∑∑==∑质心公式:⑵、质点系内各质点动量的矢量和称为质点系的动量。
)idr p v dt ()i i dm r dt∑注意:质量m i是不变的如何进一步简化?参考重心、形心公式。
李禄昌()i i i i c im r m r r m m ∑∑==∑) p r r cm v =质点系的动量等于质心速度与其全部质量的乘积。
求质点系的动量问题转化为求刚体质心问题。
cωv C =0v Ccωcov C2.冲量的概念:tF IF I d d IF d 物体在力的作用下引起的运动变化,不仅与力的大小和方向有关,还与力作用时间的长短有关。
用力与作用时间的乘积来衡量力在这段时间内积累的作用。
冲量是矢量,方向与常力的方向一致。
冲量的单位是N.S 。
§11-2 动量定理—-确定动量与冲量的关系由牛顿第二定律:F v m )F v m d )称为质点动量定理的微分形式,即质点动量的增量v v ~ ⎰==-21d 12t t It F v m v m称为质点动量定理的积分形式,即在某一时间间隔⎰==-21d 12t t It F v m v m 2、质点系的动量定理(F (F外力:,内力:(F (F M FF F v tF F v i i d )(∑+)()(d d d e ie i It F p ∑=∑=)(d d e i F tp ∑=称为质点系动量定理的微分形式,即质点系动量的质点系动量对时间的导数等于作用于质点系的外力的矢量和(主矢)动力学与静力学联系。
)(112e ini Ip p =∑=-p p ~ 称为质点系动量定理的积分形式,即在某一时间)(d d e xx F tp ∑=)(d d e yy Ftp ∑=)(d d e z z F tp ∑=动量定理微分形式的投影式:动量定理积分形式的投影式:)(12e xx x Ip p ∑=-)(12e yy y Ip p ∑=-)(12e zz z Ip p ∑=-动量定理是矢量式,在应用时应取投影形式。
《理论力学》课件 第11章
因此,力F的元功又可表示为 δW F cosds F cos Rd
由静力学可知, F cosR 即为力 F 对轴 Oz 的力矩 Mz (F) ,于是有
δW Mz (F )d
(11-16)
即作用于定轴转动刚体上力的元功,等于该力对转轴的矩(简称 转矩)和微转角的乘积。
图11-5
当刚体在力 F 的作用下,绕轴转过 角时,力 F 所做的功为
v2 v1
d
1 2
mv2
M2 F dr
M1
或
1 2
mv22
1 2
mv12
W12
(11-22)
这就是质点动能定理的积分形式,即质点在某运动过程中动能的改 变,等于作用于质点上的力在同一过程中所做的功。
质点动能定理建立了质点动能和力的功之间的关系,它把质点的速度、作 用力和质点的路程联系在一起,对于需要求解这三个物理量的动力学问题, 应用动能定理是方便的。此外,通过动能定理对时间求导,式中将出现加 速度,因此动能定理也常用来求解质点的加速度。
则这种约束力所做功的总和为零。
图11-8
4.无重刚杆
如图 11-9 所示,无重刚杆 AB 连接两个物体,由于刚杆重量不计,因此其约束 力 FN 与 FN 应是一对大小相等、方向相反,作用线相同的平衡力。设 A,B 两点的 微小位移分别是 drA 和 drB ,则 FN 与 FN 元功之和为
δW FN drA FN drB FN | drA | cosA FN | drB | cosB FN (| drA | cosA | drB | cosB )
当力偶矩 M 常量时,上式可写为
(11-19)
W M
五、约束力的功与理想约束
理论力学课件 动能定理
z m2 m3 C rC O x' x 而
i
mi m1 y
ri
y'
mn
1 2 1 2 T= mvC mi vri 2 2
d m v m i ri dt i i 0
质点系的动能,等于系统随质心平移的动能与相 对于质心平移参考系运动的动能之和。
2012年5月3日 Thursday 理论力学CAI 4
第13章
动 能 定 理
动量定理和动量矩定理是用矢量法研究动力学问 题,而动能定理用能量法研究动力学问题。能量法不 仅在机械运动的研究中有重要的应用,而且是沟通机 械运动和其它形式运动的桥梁。动能定理建立了与运 动有关的物理量—动能和作用力的物理量—功之间的 联系,这是一种能量传递的规律。
2012年5月3日 Thursday
Fx =0, Fy =0, Fz =-mg
F mgk
W mgdz mg ( z1 z 2 )
z1 z2
对于质点系
2012年5月3日 Thursday
W mg ( z C 1 z C 2 )
理论力学CAI 11
重力的功与重心运动的高度差成正比,与路径无关。
② 弹性力的功
Jz——刚体对轴的转动惯量
2012年5月3日 Thursday 理论力学CAI 3
z'
柯尼希(Koenig) 定理
质点系动能计算
1 1 T mi vi2 mi (vC vri ) 2 2 2 1 1 2 2 mi vC mi vri mi (vC vri ) 2 2 1 2 1 2 mvC mi vri vC mi vri 2 2 1 2 1 2 mvC mi vri 2 2
理论力学第十一章 动能定理[精]
![理论力学第十一章 动能定理[精]](https://img.taocdn.com/s3/m/0ec5cb7e55270722182ef72f.png)
解:
动能: T m 2 v 2 A m 220 2 2 m 3 v c 2 2 1 r 2 2 m 3c 2 2 1 m 2 v B 2
功Cr:W xB g xCs2m 3 i C rx n A 0 M 0r 0 m 3 0Rg c xAm 2 x g PB m x vA A cg 3 o Mf s x 0 s
vB
B
§11-3 质点系动能定理
i 第 个质点
分别乘以 vid
mi
dvi
dt
tdr
Fi
m iv id v i F id r
d(12mivi2)dWi 叠加
d(12mivi2)dWi
d(12mivi2)dW i
dTdWi
质点系动能的微分等于作用于质点系的力的元功之和。
O
v
P
M v
dr M F
y
W s(F xd xF yd yF zd)z
M2 M1
dW
x
FR Fi
W F R d s F 1 d s ... ..W .i .
S
S
自然坐标形式 :
WM M 1 2F drM M 1 2Fdrcos dr ds
Jo
1 3
P g
l2
Fy
Fx
(1)式两边对时间求导
Ql2 lPsinJ0 Q gl2
900
QP 2 sin 3 1P glQ gl
P2Q3g P3Q 2l
例11-9:已知:mA=m,mB=m/2,mC=m/3,鼓轮的廻转半径为, 质量为m,鼓轮小半径为r,大半径为R,C轮的半径为r,物体A 接触的摩擦系数为fs,求物体A下落时的速度。
理论力学-11-动能定理及其应用ppt课件
M k
其中k为扭簧的刚度系数。当杆从角度θ1转到角度θ 2时所 作的功为 12 12 2 W k dk k 1 2 1 2 1 2 2
11.1 力的功 3、内力的功
内力作功的情形 日常生活中,人的行走和奔跑是腿的肌肉内力作功; 弹簧力作功等等;摩擦力做功损耗能量。 刚体的内力不作功 刚体内任何两点间的距离始终保持不变,所以刚体 的内力所作功之和恒等于零。
11.1 力的功
W F d r F dx + F dy + F dz 12 i i x y z W
M 2 M 2 M 2 M 1 M 1 M 1
由此得到了两个常用的功的表达式: 重力的功 对于质点:
z
M1 z1
F F 0 x y
重力的元功为
F P mg z=
r = k ( r l ) d r 0 r
r0——沿位矢方向的单位矢量 A k 2 2 2 W W r l r l 12 1 0 2 0 A 1 2
1 、 2 ——弹簧在初始位置和最终位置的变形量 。
k 2 2 W ( ) 12 1 2 2
vO O
C*
FN
W F d r F v d t 0 F C C
约束力为无功力的约束称为理想约束
11.1 力的功
总结: 内力不能改变质点系的动量和动量矩,但 它可能改变质点系的能量; 外力能改变质点系的动量和动量矩,但不 一定能改变其能量。
第11章 动能定理及其应用
11.2 质点与质点系的动能
弹性力作的功只与弹簧在初始和终止位置的变形量有关。
理论力学动能定理解析
对于线性弹簧,在此位置的弹簧力 F k
因此,弹簧力的功为
W12
1 2
k (12
2 2
)
B B1
FB1
FB
1
2
FA1
A1
FA
FA2
A
A2
B2 FB2
(3) 质点系的外力(主动力)的功
① 质点系的重力的功
设质点系内任一质点的质量为mi,当它由初位置点Ai
(xi1, yi1, zi1) 运动到末位置点Bi (xi2 , yi2 , zi2 )
在势力场中,质点从点M运动到任选的点M0,有势 力所作的功称为质点在点M相对于点M0的势能。以V表 示为
M0
M0
V F dr (Fxdx Fydy Fzdz)
M
M
点M0的势能等于零,称为零势能点。在势力场中, 势能的大小是相对于零势能点而言的。零势能点可以 任意选取,对于不同的零势能点,在势力场中同一位 置的势能可有不同的数值。
1 2
mvC2
Te
是质点系随质心平移的动能,亦 可称为牵连运动动能;
1 2
mi
vr2i
Tr
是质点系相对质心转动的动能,亦可 称为相对运动动能;
T
1 2
mvC2
1 2
mi
vr2i
或 Ta Te Tr
(2) 刚体的动能
(a)平移刚体的动能
T
1 m
2i
vi2
1 2
vC2
mi
即
T
1 2
mvC2
(1) 重力场中的势能
重力场中,以铅垂轴为z轴,z0处为零势能点。质点于 z坐标处的势能V等于重力mg由z到z0处所作的功,即
理论力学 动能定理

第11章动能定理即质点系的动能等于其随质心平BCθABθCPA2rOr C力的功2rOr CAP2rOr CAP2rOr CAPs汽车驱动问题能量角度:汽缸内气体爆炸力是内力,不改变汽车的动量,但使汽车的动能增加。
动量角度:地面对后轮的摩擦力是驱动力,使汽车的动量增加,但不做功,不改变汽车的动能。
内力不能改变质点系的动量和动量矩,但可以改变能量;外力能改变质点系的动量和动量矩,但不一定能改变能量。
例题11-8水平悬臂梁AB,B端铰接滑轮B,匀质滑轮质量m1,半径r;绳一端接滚,轮C,半径r,质量m2视为质量集中在边缘;绳另端接重物D,质量m3。
求重物加速度。
CωDv BωCv 解:末位置是一般位置hconst 01==T T =2T 2321D v m 221B B J ω+221CP J ω+运动学关系rr v v B C C D ωω===2121rm J B =2222222rm r m r m J P=+=2321222121Dv m m m T ⎟⎠⎞⎜⎝⎛++=gh m W 312=CωDv BωCv h1212W T T =−gh m T v m m m D 30232122121=−⎟⎠⎞⎜⎝⎛++对t 求导h g m vv m m m D D &&33210)221(=−++Dv h =&D D a v=&gm m m m a D 3213221++=例11-9匀质圆盘和滑块的质量均为m。
圆盘的半径为r。
杆平行于斜面,其质量不计。
斜面的倾斜角为θ。
圆盘、滑块与斜面的摩擦因数均为μ。
圆盘在斜面上作纯滚动。
试求滑块下滑加速度。
1212W T T =−01=T 2222212121mvJ mv T A ++=ω解()sF F mgs mgs W B A +−+=θθsin sin 12θμcos mg F F B A ==取导221,mrJ v r A ==ω2245mvT =()θμθcos sin 2452−=gs v a v v s==&&,()θμθcos sin 54−=g a F A 是静摩擦力,理想约束,不作功。
十一章动能定理-PPT精品文档

1 mv2 2
2 2 v v v ( v v ) ( v v ) v 2 v v v Cr i Cr i C C ri ri
v v v i C ri
1 2 1 2 1 2 m v m v m v v T mi vi i C i ri i C ri 2 2 2 1 2 1 2 mv m v v m v C i ri C i ri 2 2 1 2 1 2 v m v v m v 0 T mv m v C iri C rC C i ri 2 2
F
由于刚体上任意两点之间的距离始终 保持不变。因此
d r d r Bcos Acos
F
A
故得
dW 0
B
d rB
§11-2 动能
1、质点动能
T
由速度合成定理:
2 i i i
2 kg m N m J 焦耳 T m v 2 单位: s 1 2 1 n 2 T dT s v dm 2、质点系的动能 T mi vi 或 s 2 2 i1 2
M 2 M 1 r 2 r 1
例11-1:固定圆环半经为R,小球套在圆环上,被长度为l 2R 的弹簧约束在O点。求:小球从A到B的功,又从B到C的功。 解: 从A到B的功:
A
δ1 0
δ (2R 2 R ) 2
0
k 2 2 W ( 2 2 ) R 0 . 171 kR 2
柯尼希定理:
质点系的动能等于随同其质心平动的 动能与相对其质心运动的动能之和。
例11-2: 坦克履带轮,已知:履带重P,各轮重W,半径 R,写出整个系统的动能。
理论力学课件:动能定理
动能定理
【例12-8】 C618车床的主轴转速n=42r/min时,其切削力
P=14.3kN,若工件直径d=115mm,电动机到主轴的机械效率
η=0.76。求此时电动机的功率为多少?
解 由式(12-12)得切削力P 的功率:
动能定理
12.5 势力场 势能及机械能守恒定理
动能定理
动能定理
12.4 功率 功率方程
1.功率
在单位时间内力所做的功称为功率。它是衡量机器工作
能力的一个重要指标。
δW 是dt时间内力的元功,则功率为
动能定理
由于元功为δW =Ft·ds,因此
即,力的功率等于切向力与力作用点速度的乘积
力矩的元功为δW =M·dφ,则
即,力矩的功率等于力矩与物体转动角速度的乘积。
动能定理
动能定理
12.1 力的功
12.2 质点 质点系的动能
12.3 质点与质点系的动能定理
12.4 功率 功率方程
12.5 势力场 势能及机械能守恒定理
12.6 动力学普遍定理及综合应用
思考题
动能定理
12.1 力 的 功
工程实际中,一物体受力的作用所引起运动状态的变化,
不仅取决于力的大小和方向,而且与物体在力的作用下经过
的功。
动能定理
图12-15
动能定理பைடு நூலகம்
【例12-4】 在图12-16中,为测定摩擦系数f,把矿车置于
斜坡上的A 点处,让其无初速下滑。当它达到B 点时,靠惯性
又往前滑行一段路程,在C 点处停止。求摩擦系数f0,已知S1、
S2 和h。
图12-16
动能定理
同济理论力学第11章动能定理概要PPT课件

M2 dW
M1s F 1 d s ... . .W .i.
S
S
自然坐标形式 :
WM M 1 2F drM M 1 2Fdrcos dr ds
W M M 1 2 F cF o 、 v ) d s ( M M s 1 2 F ds
z
几种常见力的功:
r
M v
k(rl0)1 rd(r2 r)
M1
lO 1
r M
F
A rO
M2
lO 2
k(rl0)1 rd(r2 2)k(rl0)dr
d Wk2d(rl0 )2
W M M 1 2w r r 1 2k 2 d ( r l 0 ) 2 k 2 [r 1 ( l 0 ) 2 ( r 2 l 0 ) 2 ]
v
T1 3W2Pv2 2g
刚体动能计算
1、平移刚体的动能: T2 1m ivi22 1m iv22 1m2v
2、定轴转动刚体的动能:
T
1 2
mivi221(mii2
)2
1 2
J z
2
3、平面运动刚体的动能: T21mC 2v21JC2
vC C
[ρC:瞬心到质心的距离]
根据转动惯量的平行移轴定理
JI JCmC 2
T
1 2
JI2
例11-3:均质杆AB长l,质量为m,滑 块B的质量为m,圆柱A的质量为M,半
径为R。在运动过程中θ=θ(t),试 写出在θ=450瞬时的系统动能。
解: vA22l,vC2 l,vB22l
TAB21mC 2v21JC2
1m (l)21m2l21m2l2
2 2 212 6
I
CvC
A
vA
理论力学动能定理
的等效力(其力矢为力系的主矢)在质心的位移上所作
的功。
③ 作用在定轴转动刚体上的力的功
作用在定轴转动刚体上的力系的元功为
dW dWi ω M z (Fi )dt M z (Fi )d M z d
作用在定轴转动刚体上的力系的功等于力系向转轴 简化的等效力偶(其力偶矩为力系对转轴的主矩)在刚 体的角位移上所作的功。
drAB
B
drAB // FB
y
drAB可以分解为平行于FB与垂直于FB的两部分,即
drAB drAB // drAB
内力元功之和
dW i FB drAB FB (drAB// drAB ) FBdrAB //
当A、B的距离变化时,内力的元功之和不等于零。
工程中常用的弹簧力的功就是内力的功。设弹簧的
② 作用在平移刚体上的力的功
设力F在质点系上的作用点的速度为v,则在时间dt
内,力F的元功为
dW F dr F vdt
刚体平移时,在任一瞬时刚体上的各点的速度相同, 则作用在刚体上的力系的元功为
dW Fi dri Fi vdt Fi drC FR drC
例如质点系在重力场中各质点的z坐标为 时为零势能点位置,则各质点z坐标为 时的势能为
z10 , z20 ,, zn0
z1 , z2 , , zn
V mi g ( zi zi 0 )
质点系的重力势能可写为
V mg ( zC zC 0 )
(4) 有势力的功
设某个有势力的作用点在质点系的运动过程中,从 点M1到点M2,该力所作的功为W12。若取M0为零势能点, 则从M1到M0和从M2到M0有势力所作的功分别为M1和M2 位置的势能V1和V2。因有势力的功与轨迹形状无关,而 由M1经过M2到达M0时,有势力的功为
理论力学动能定理
光滑铰链(中间铰链)、刚性二力杆及不可伸长的细 绳作为系统内的约束时,约束力作功之和等于零。 滑动摩擦力作负功。
当轮子在固定面上只滚不滑时,滚动摩擦力不作功。
变形元件的内力(气缸内气体压力、弹簧力等)作功; 刚体所有内力作功的和等于零。
例2 卷扬机如图,鼓轮在常力偶M的作用下将圆柱上拉。已 知鼓轮的半径为R1,质量为m1,质量分布在轮缘上;圆柱 的半径为R2,质量为m2,质量均匀分布。设斜坡的倾角为α, 圆柱只滚不滑。系统从静止开始运动,求圆柱中心C经过路 程S 时的速度。 解:以系统为研究对象, 受力如图。系统在运动过程中 所有力所作的功为
vC 1 R1
2 1
1 2 J c m2 R2 2
vC 2 R2
m2g
FS
FN
于是
2 vC T2 (2m1 3m2 ) 4
FOy M O C m1g FOx
由 T2 T1 W12 得
m2g
FS
FN
2 vC s (2m1 3m2 ) 0 M m2 g sin s 4 R1
1 2 d mv W 2
--质点动能定理微分式
即:质点动能的增量等于作用于质点上外力所作的 元功。
1 1 2 2 积分后得: mv2 mv1 W 2 2 或: T2 T1 W
即:在一段路程中,质点动能的改变量等于作用于质 点上外力在路程上所作的功。
二、质点系的动能定理
的联系,这是一种能量传递的规律。
§13-1 力的功
一、力的功
力的功是力在一段路程内对物体作用的积累效应
的度量。力做功的结果是使物体的机械能发生变化
1、常力功的计算
【推荐】理论力学:ch11质点系动能定理.ppt

12
动力学/动能定理
二、质点系的动能 ——质点系内各质点动能的算术和
——柯尼希定理
即:质点系的动能(绝对运动动能),等于系统随质心 平移的动能(牵连运动动能)与相对于质心平移坐标系 运动的动能(相对运动动能)之和。
注意:这一结论只有以质心为基点时是正确的,对于 任意点为基点的情形,上述结论一般是不正确的。
例11-6 两根质量为m长为l 的均质杆AC和BC,在C处光 滑铰接,置于光滑水平面上。设两杆轴线始终在铅垂面 内,初始静止,C点高度为h。求铰C到达地面时的速度。 解:(1)取整个系统为研究对象
(2)受力分析,并计算力的功
(3)运动分析,并计算动能
因 ,故C点铅垂落下。
由A、C两点的速度方向,可知
◆有势力与势能的关系
40
动力学/普遍定理综合应用
3.机械能守恒定律
保守系统:具有理想约束,且所受的主动力皆为有势力
的系统称为保守系统。对保守系统,动能定理为
式中
应为系统中所有有势力的功之和。
有势力的功与路径无关,可通
过势能计算 。如图所示,设质
点在M1,M2 处的势能分别为V! 和V2。如以O点为零势点,则
势能函数相等的各点所组成的曲面称为等势面,表示为 如重力场的等势面是不同高度的水平面,如图(a)。弹性 力场的等势面是以弹簧固定端为中心的球面,如图(b)。地球 引力场的等势面是以地心为中心的不同半径的同心球面。
39
动力学/普遍定理综合应用
当C=0时的等势面称为零等势面。 在重力场中,一般选水平面为零势面;在弹性力场中 选弹簧自由长度,初变形为零处为零势能位置;万有引力 场中选无穷远处为零势能位置。
理论力学第十一章动能定理
由于刚体上任意两点之间的距离始终保持不变。因此
d rB
cos
d rA
cos
d w 0
5、约束力的功 (1)光滑固定面力的功 d w FN d r 0 (2)摩擦力的功
FN dr
FN
静滑动摩擦力不做功
纯滚动摩擦力: dW F dr F vI dt 0
IF
动滑动摩擦力的功:dW F ds fd FN ds
1 2
mivr2i
柯尼希定理: 质点系的动能等于随同其质心平动的动 能与相对其质心运动的动能之和。
三、刚体的动能
1、平移刚体的动能:
T
1 2
mi
vi2
1 2
mi
v
2
1 mv2 2
2、定轴转动刚体的动能:
T
1 2
mi
vi2
1 2
(mi
i
2
)
2
1 2
J z 2
3、刚体作平面运动
设刚体上任一质点到瞬心的垂直距离为 i,则该
/
h2
a |90 3.14m/s 2 ( 90 )
例5:已知:mA=m,mB=m/2,mC=m/3,鼓轮的回转半径为,质 量为m,鼓轮小半径为r,大半径为R,外力偶M,C轮的半径为r, 物体A接触的摩擦系数为fd,系统初始静止,求物体A的速度(表 示成物体A位移xA的函数)。
解: “系统” T1 0
解 :BC杆及重物D(以 杆BC的水平位置为零势能位 )
V1
P1
l 2
cos
P2l
cos
( P1 2
P2 )l
cos
弹簧(选弹簧的原长处为势能的零位置)
B
V2
理论力学11动能定理

F dr Xdx Ydy Zdz)
力 F 在曲线路程 M1M 2 中作功为
M2
M2
W F cosds F ds (自然形式表达式)
M1
M1
M2
F dr
(矢量式)
M1
M2
Xdx Ydy Zdz (直角坐标表达式)
9
M1
三.合力的功
质点M 受n个力 F1,F2 ,,Fn 作用合力为 R Fi 则合力 R
F d (rA rB ) F d (BA)
只要A、B两点间距离保持不变,内力的元功和就等于零。
不变质点系的内力功之和等于零。刚体的内力功之和等于零。
不可伸长的绳索内力功之和等于零。
功的计算公式中力作用点的含义应包括三方面: (1)受力点:受力物体(分析对象)上直接受到力的那个点; (2)加力点:施力物体上加力的那个点,该瞬时与受力点的接触点; (3)力点:力作用点的空间位置。 任何瞬时这三个点都是重合的,但在很多情况下,这三个点具有不同的运 动和轨迹。 功的正确计算: dr 和 v应当为受力点的位移和速度。
即 dT Wi 质点系动能定理的微分形式 将上式沿路径 M1M 2 积分,可得
T2 T1 W 质点系动能定理的积分形式
在理想约束的条件下,质点系的动能定理可写成以下的形式
dT W (F) ; T2 T1 W (F)
5
若将质点系中的受力分为外力、内力,则有外力功和内力功
T2 T1 W12
W12 i
ri 2 ri1
F (e)
i
dri
i
ri 2 ri1
F (i)
i
dri
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P 2 1 P 2 1 P 2 2 1 P 2 Rω + T带 = v + ( 2v ) = v 2 4g g 2 2g 2 2g
T= 1 3W + 2 P 2 v g 2
例4:均质杆 长l,质量为 ,滑块 :均质杆AB长 ,质量为m,滑块B 的质量为m,圆柱A的质量为 的质量为M, 的质量为 ,圆柱 的质量为 ,半径 为R.在运动过程中θ =θ(t).试写出在 . ) θ =45° 瞬时的系统动能. ° 瞬时的系统动能.
dT = ∑dWi
动能定力的元功之和 质点系动能的增量 等于作用于质点系的力的元功之和 两边积分: 两边积分:
T2 T = ∑W 1 i
e
动能定理的积分形式
i
T2 T1 = ∑Wi + ∑Wi = ∑Wi + ∑W i
A A
N
质点系动能的改变 等于作用于质点系的所有力所做功的总和 质点系动能的改变 等于作用于质点系的所有力所做功的总和
1 2 1 T = mυC + JCω2 2 2
例2:空心轮重为 ,半径为 ,写出空心轮的动能. :空心轮重为P,半径为R,写出空心轮的动能. 如为匀质实心轮,写出实心轮的动能. 如为匀质实心轮,写出实心轮的动能.
1 2 1 解: T空 = mυC + JCω2 2 2
轮幅 轮缘
P 2 1 P 2 vc 2 P 2 P 2 vc + R 2 = vc = R 2g 2 g g R g JC =1 mi ρi2 1 2 ∑ 2 T实 = mυC + JCω 2 2 P 2 P 2 1 vc 2 3 P 2 P 2 = vc + + R = vc R 2 1 2g 2g 2R 4 g T = JPω2 1 2 2 JC = mR 2 JP = JC + mR2
柯尼希定理: 柯尼希定理:
质点系的动能 等于随同其质心平动 等于随同其质心平动 的动能与相对其质心运动的动能之和 的动能与相对其质心运动的动能之和
三,刚体的动能: 刚体的动能:
1 1 1 2 1,平行移动刚体的动能: T = ∑ mi vi = ∑ mi v2 = mv2 的动能: ,平行移动刚体的动能 2 2 2 υi = ρiω 2,定轴转动刚体的动能: 的动能: ,定轴转动刚体的动能 1 1 1 2 2 2 T = ∑ mi vi = (∑mi ρi )ω = J zω 2 2 2 2
3,刚体平面运动的动能: ,刚体平面运动的动能: 的动能 设刚体上任一质点到瞬心的垂直距离为 ρi 则该点的速度为 υi = ρiω
1 1 T = ∑miυi = (∑mi ρi2 )ω2 2 2 2 JP = JC + mρC 1 2 T = (JC + mρC )ω2 2
1 T = JPω2 2
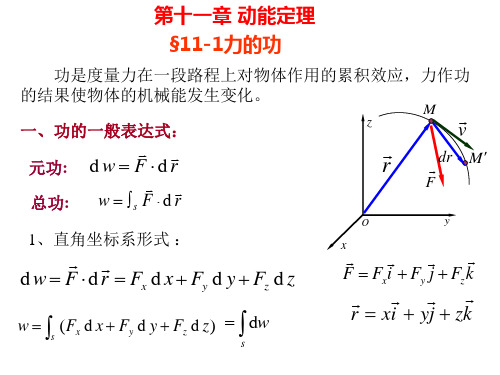
dW = F dS 元功
z
M
v
dr dW = F dr 总功: 总功: W = ∫ s F dr
O
r
dr M ′
F
y
dS
1,直角坐标形式 直角坐标形式: 直角坐标形式
dW = F dr = Fx dx + Fy dy + Fz dz
W=
x
F = Fxi + Fy j + Fzk
∫s dW = ∫ ( F dx + F dy + F dz )
代入 W = ∫ F d x + Fy d y + F d z x z
s
M
z1
O
mg
z2
M2
= ∫ mg d z = mg( z1 z2 )
z1
z2
重力的功取决于重力大小和过程始末的质点位置, 重力的功取决于重力大小和过程始末的质点位置, 取决于重力大小和过程始末的质点位置 而与质点在其间运动的轨迹无关. 而与质点在其间运动的轨迹无关. 对于质点系
1 2 T = ∑ mi vi 2
1 2 T = mv 2
平动动系 在质心
速度合成定理: 速度合成定理: vi = vC + vri
2 2 vi2 = vi vi = (vC + vri ) (vC + vri ) = vC + 2 vC vri + vri 1 1 1 n 2 2 2 T = ∑ mi vi = ∑m i v C + ∑m i v ri + ∑m i v C v ri 2 2 2 i =1 1 1 2 2 = mvC + ∑mi v ri + v C ∑mi v ri 2 2 1 2 1 2 ∵vC ∑mivri = vC mvrC = 0 ∴T = mvC + ∑mivri 2 2
例3:图示为坦克履带轮.已知:履带重 ,各轮重 ,半径 :图示为坦克履带轮.已知:履带重P,各轮重W, R,写出整个系统的动能. ,写出整个系统的动能. πR 1 = JPω2 v = Rω 解: 2v 2 ω 1 3W 2 2 3W 2 v T轮 = 2 v = Rω + 22 g 2 g T带 = T轮履质心 + T轮履转动 + T水平履带 轮履质心 轮履转动
dr
I
F
包括:光滑面约束;光滑铰链;不可伸长的绳索; 包括:光滑面约束;光滑铰链;不可伸长的绳索; 刚体纯滚动;刚性连接约束等. 刚体纯滚动;刚性连接约束等. P41 习题:1,2 习题: ,
§11-2 动能 一,质点的动能: 质点的动能 质点的质量为m 速度值为 速度值为v 质点的质量为 二,质点系的动能: 质点系的动能
t = 0,
v0 = 0 , ,T1 = 0
动能定理
Pv2 Wr 2ω2 + 2 = Px 2g 2 g
ω
W
v ω= r
Pgx v =4 2P + W
2
Pgx v=2 2P + W
v P F a P x
2 Pg Pg 2va = 4 x, a = 2P + W 2P + W
P dv a = PF 轿厢 = g dt
例1:固定圆环半经为 ,小球套在圆环上,被长度为 = 2 R 的 :固定圆环半经为R,小球套在圆环上,被长度为l 弹簧约束在O点 小球从A到 的功 又从B到 的功 的功, 的功. 弹簧约束在 点.求:小球从 到B的功,又从 到C的功. 解: 的功: 从A到B的功 到 的功 A
δ1 = 0
δ 2 = 2 R 2 R) (
s x y z
r = xi + yj + zk
2,自然坐标形式 : ,
W =∫
M2 M1
F dr
∵ dr = ds
z
M
v
∴W = ∫ s F cos( F,v )ds = ∫ s Fτ ds
3,合力的功 ,
r
O
dr
M′
F
y
n个力: F1, 2, , n F F
x
FR = ∑ Fi
....... W = ∫ FR dr = ∫ F1dr + ....... = ∑ Wi
3,作用于转动刚体的力及力偶的功: ,作用于转动刚体的力及力偶的功:
Fz
d
dW = Fτ ds = Fτ rd
dW = M z d
4,刚体内力的功: ,刚体内力的功:
自然坐标形式
F
ds = r d Fτ r = M z (F) = M z
2 W = ∫1 Mz d
ds
F τ
Fr
常力偶
∑dW = F d rA + F′ d rB
= F d rA cosα + F d rB cos β
= F( d rB cos β d rA cosα)
d rB cos β = d rA cosα
B
d rA α
F
A
F′
β
d rB
由于刚体上任意两点之间的距离始终保持不变. 由于刚体上任意两点之间的距离始终保持不变. 因此
∑d′W = 0
5,约束反力的功: ,约束反力的功 (1)光滑固定面反力的功 )
W = ∑mi g(zi1 zi2 ) = (∑mi zi1)g (∑mi zi2 )g
W = mg(zC1 zC2 )
2,弹性力的功: ,弹性力的功
自然坐标形式
M1
设弹簧原长为l 弹簧刚度系数为k, 设弹簧原长为 0,弹簧刚度系数为 , lO +δ1 r 弹性力 F = k(r l0 )
vB
I
ωA
A
θ,
C
B
vC
θ =45° °
vA
2 2 l 解: vC = θ, vA = lθ, , vB = lθ , 2 2 2
1 1 2 T AB = mv C + J C θ 2 2 2 1 l 2 1 ml 2 2 1 2 2 θ = ml θ = m( θ ) + 2 2 2 12 6 1 2 1 2 1 TB = mv B = m( θ ) 2 = ml 2θ 2 2 2 2 4
O
k 2 W = [0 (2 R 2 R) 2 ] = 0.171kR 2 2
的功: 从B到C的功 到 的功
45° ° 22.5° °
B C
δ1 = 2 R 2 R) δ 2 = OC 2 R ) ( (
OC = 2 R cos 22.5° = 1.84776R
k 2 2 W = (δ1 δ 2 ) = 0.077kR 2 2
动能定理 §13-3 质点系动能定理 - 质点系动能
dvi = Fi 个质点所组成的质点系: 由n个质点所组成的质点系: 第 i个质点 mi 个质点所组成的质点系 dt 1 分别点乘 vi dt = dri mi vi dvi = Fi dri d( mi vi2 ) = dWi 分别点乘 2 1 1 2 质点系: 质点系: ∑d ( m i v i ) = ∑dWi d(∑ mi vi2 ) = ∑dWi 2 2