7-1描述函数法分析
第二节 描述函数法

第二节 描述函数法
18
作业:7-1(b)
2020/10/18
第二节 描述函数法
19
(A )
2020/10/18
第二节 描述函数法
16
2) 非线性环节的串联 当两个非线性环节串联,其总的描述函数不等于两个非
线性环节描述函数乘积。
非线性环节串联
必须首先求出这两个非线性环节串联后的等效非线性特性, 然后根据等效的非线性特性求出总的描述函数。 例7-2 求下图所示两个非线性环节串联总的描述函数N(A)。
一、描述函数的概念
针对一任意非线性系统,设输入x(t)=Asinωt,输出波形为
y(t),则可以将y(t)表示为富氏级数形式:
y(t) A0 ( An cos nt Bn sin nt) n1
A0 Yn sin(nt n ) n 1
2020/10/18
第二节 描述函数法
2
y(t) A0 ( An cos nt Bn sin nt)
N ( A) N1( A) N2( A)
2020/10/18
第二节 描述函数法
12
3、组合非线性特性的描述函数
当非线性系统中含有两个或两个以上线性环节时: 一般不能按照线性环节的串并联方法求总的描述函数; 应按非线性的并联、串联方法计算。
1)非线性特性的并联 设系统中有两个并联的非线性环节,其非线性特性都是
A
AA A A A
2020/10/18
第二节 描述函数法
9
⑦ 非线性增益I 非线性特性
描述函数
N ( A)
k2
2
(k1
k2 )[sin1
a A
a A
1 ( a )2 ] A
自动控制原理__(13)
江南大学物联网工程学院——自动控制原理
(2)会产生自激振荡 非线性系统即使无外界作用,往往也会产生具有一定振幅 和频率的稳定性振荡,称为自激(自持)振荡。在有的非线性 系统中,还可能产生不止一种振幅和频率的自激振荡。自激振 荡是非线性系统一种特有的运动形式,其振幅和频率由系统本 身特性决定。 说明:
江南大学物联网工程学院——自动控制原理
2. 典型的非线性特性
常见的非线性特性有饱和、死区、间隙(回环)、继电等。 (1)饱和特性 特点:当输入信号超过某一范围后,输出信号不再随输 入信号而变化,将保持某一常数值不变。可将饱和非线性元 件看作为一个变增益的比例环节。
x2 f ( x1 ) tan , x1 <s 如图: x2 f ( x1 ) K x1 x1 0, x1 >s
作用:饱和特性将使系 统等效增益减小,因此可用 来改善系统的稳定性,但会 降低稳态精度。在有些系统 中利用饱和特性起信号限幅 作用。
(a)理想饱和特性
(b)实际饱和特性
图7-2 理想与实际饱和特性
江南大学物联网工程学院——自动控制原理
(2)死区(不灵敏区)特性 特点:是当输入信号在零值附近的某一小范围之内变化 时,没有相应的输出信号,只有当输入信号大于此范围时, 才有信号输出。 常见于测量、放大、变换元件中,执行机构中静摩擦的 影响往往也可用死区来表示。 影响:控制系统中死区特性的存 在,将导致系统稳态误差增大,而测 量元件死区的影响尤为显著。摩擦死 区会造成系统低速运动的不均匀,导 致随动系统不能准确地跟踪目标。
3. 非线性系统的分析方法
目前,对于非线性系统的分析与设计,工程上常用的近似方法有:小 偏差线性化法、分段线性化法、反馈线性化法、描述函数法、相平面法及 计算机仿真等。本章将重点介绍应用较多的相平面法和描述函数法。 (1) 相平面法 相平面法是基于时域的图解分析方法。特点是保留非线性特性,将高 阶的线性部分近似地化为二阶,利用二阶系统的状态方程,绘制由状态变 量所构成的的相轨迹图。可用来分析系统的稳定性及运动特性。 只适用于一、二阶的简单非线性系统分析。
王建辉《自动控制原理》(名校考研真题 非线性系统分析)【圣才出品】
第7章 非线性系统分析一、选择题1.非线性系统的无穷多条相轨迹相交的点称为()。
[华中科技大学研]A.奇点B.会合点C.分离点D.终点【答案】A2.输出信号的一次谐波分量和输入信号的复数比定义为非线性环节的()。
[华中科技大学研]A.传递函数B.描述函数C.谐波函数D.频率特性【答案】B二、解答题1.已知非线性系统如图7-1所示,其中,T>0,K>0,现要求系统输入量c(t)的ωc=10,试确定参数T和K的数值。
(非线性环节自振振幅X c=0.1,角频率为)[上海交通大学研]图7-1解:由已知ωc =10,线性部分传递函数为即又由于ωc =10,自振振幅X c =0.1得因此有2.已知某非线性系统结构如图所示,试用描述函数法分析K (K >0)值对系统稳定性的影响。
[南京航空航天大学2006研]图7-2 非线性系统结构图解:该饱和特性的描述函数为负倒描述函数当A =1时,,当A→+∞时,,因此位于负实轴上的-1~-∞区段。
线性部分频率特性为令ImG (j ω)=0,得G (j ω)与负实轴交点的频率为,且在复平面上绘制G (j ω)曲线以及曲线如下图所示。
由图可见,当时,即0<K <6系统稳定;当时,即K >6系统产生自振。
自振频率,振幅A 由求得。
图7-33.某单位负反馈非线性系统如图所示,非线性环节的描述函数为,线性部分的传递函数如图所示。
试分析:(1)系统是否存在自振。
(2)若产生自振,计算自振频率及振幅,并讨论极限环的稳定性。
[浙江大学2008研]图7-4 非线性系统结构图解:非线性环节负倒描述函数为线性部分频率特性为且在复平面上绘制G(jω)曲线以及曲线如下图所示,相交于B点,有解得即系统存在自振的频率为1.155,振幅为11.246。
图7-54.已知非线性控制系统的结构图如图7-6所示。
为了使系统不产生自持振荡,试采用描述函数法确定图中非线性环节的特性参数a和b的数值。
[长安大学研][南京理工大学研][华中科技大学研]图7-6解:由题知非线性环节为死区继电器特性,则图形如图7-8所示。
描述函数法讲解
Ka sintd(t)
KA s in2
td(t
)
2
KAsin1
a
a
1
a
2
AA
A
则饱和特性的描述函数为:
N ( A)
B1
2
K sin1
a
a
1
a
2
A
AA
A
式中,
Asin
a,
sin1
a
A
x(t) k
由于输出波形为奇函数,
A1=0,(单值奇对称)
1
tg1
A1 B1
0
a
t
x(t)
e(t)
e(t)
10
B1
2
x(t)sint d(t)
0
2
KAsin2 td(t)
N ( A)
A12 B12
j arctg A1
e
B1
B1
j
A1
A
AA
用N(A)代替非线性环节,建立起非线性系统的数学描述,可
以将线性系统频率法扩展到非线性系统中,用来分析非线性
系统。
7
说明:
一般情况下,描述函数 N 是输入正弦振幅A和振荡频率的
函数,应表示成 N ( A,) 。
但实际大多数非线性环节中不包含储能元件,它们的输出 与输入信号的频率无关,因此常见NL的描述函数 N 仅是输 入信号幅值A的函数,表示成 N(A)。
非线性系统
下一页 返回
§7-3 描述函数分析
描述函数-1/N(X)曲的交点处,沿振幅X增加方向,-1/N(X)上的 点不被G l(jω)曲线所包围,则这个交点是稳定的自激振荡点, 其线性元件的输出波形为正弦波,振荡频率为交点处G l(jω)的 ω值,现行元件输入信号一次谐波的复制为交点处-1/N(X)曲线 的X值。
振荡线性化是在非线性元件的输入端除加输入信号外,还 加一个辅助的高频振荡信号,在非线性元件的输出端接一个低 通滤波器,如图7-20所示。图中x1(t)为输入信号,x2(ωt)为附 加高频振荡,y(t)为非线性元件的输出,z(t)为低通滤波器的 输出。当输入信号x1(t)等于常数时,y(t)为频率等于ω的周期 波,其波形与x1(t)、x2(ωt)及非线性特性f(x)有关。如果低通 滤波器能滤去频率等于和高于ω的所有谐波,则低通滤波器输 出仅保留了与输入信号有关的直流分量。这样z(t)对于x1(t)而 言,可能得到近似的线性关系。
第七章 非线性系统
§7-1 概述 §7-2 描述函数法 §7-3 描述函数分析 §7-4 非线性特性的振荡线性化
§7-1 概述
一、反馈系统的非线性特性 在反馈系统中,常见的非线性特性有:
1)据有光滑曲线形式的非线性较大时,必须考 虑其非线性特性。
三、非线性系统的研究方法 1.相平面法 应用相平面图可以分析非线性系统的稳定性、过
渡过程即自振荡等问题。 2.描述函数法 描述函数法不受系统阶次的限制,但必需满足
假设条件。 3.系统仿真
上一页 返回
§7-2 描述函数法
一、描述函数的基本概念 描述函数法基于下述情况:如果非线性元件输出的周期函
数信号加到另一个线性元件的输入端,当线性元件有滤除非 线性元件输出y(t)中二次及二次以上谐波的低通滤波特性时, 那么线性元件的输出为与非线性元件输入同频率的正弦函数, 如图7-4所示。 二、描述函数计算举例
自动控制原理 第七章 非线性系统

实质上是应用谐波线性化的方法,将非线性特性线性化, 然后用频域法的结论来研究非线性系统,它是线性理论 中的频率法在非线性系统中的推广,不受系统阶次的限 制。
(2)相平面法(本质非线性):图解法。通过在相平 面上绘制相轨迹,可以求出微分方程在任何初始条件下 的解。是一种时域分析法,仅适用于一阶和二阶系统。
1
ωt
y1 (t ) B1 sint
由式(7-15)可得饱和特性的描述函数为
B1 2k a a a 2 N ( A) arcsin 1 ( ) A A A A
M sin td ( t )
yMFra bibliotek0 π2π
ωt
所以基波分量为:
y1 ( t )
4M
sin t
故理想继电器特性的描述函数为
Y1 4M N ( A) 1 A A
2.饱和特性
请牢记!
即 N(A)的相位角为零度,幅值是输入正弦信号A的函数.
当输入为x(t)=Asinωt,且A大于线性区宽度a 时, 饱和特性的输出波形如图7-10所示。
7.1.3
非线性系统的分析方法
非线性的数学模型为非线性微分方程,大多数尚无
法直接求解。到目前为止,非线性系统的研究还不成熟, 结论不能像线性系统那样具有普遍意义,一般要针对系 统的结构,输入及初始条件等具体情况进行分析。工程 上常用的方法有以下几种:
(1)描述函数法(本质非线性):是一种频域分析法,
r(t)=0 x
N
y
G(s)
c(t)
图7-8 非线性系统典型结构图
(2)非线性环节的输入输出静特性曲线是奇对称的,即 y(x)=-y(-x),以保证非线性元件在正弦信号作用下的输出不 包含直流分量。 (3)系统的线性部分具有良好的低通滤波特性。能较好的滤 除非线性环节在正弦输入下输出中的高次谐波,于是可以认 为在闭环通道中只有基波分量在流通,此时应用描述函数法 所得的分析结果才是比较准确的。实际系统基本都能满足。
自动控制原理第七章
条件下的时间响应曲线如图所示。
四、非线性控制系统的特点
3.稳定性 3.稳定性 从曲线及方程中可以看出, 系统有两个平衡状态,即 x=0和 x=1 。 按稳定性的定义对平衡状 态 x=1来说,系统只要有一 个很小的偏离,就再也不会 回到这一平衡状态上来。 因此,x=1的平衡状态是一个不稳定的平衡状态。
第七章 非线性系统的分析
§7
非线性系统的分析
教学内容:
§7-1 非线性控制系统概述 §7-2 描述函数法 §7-3 相平面法
§7-1 非线性控制系统概述
一、引言 二、研究非线性系统的一般方法 三、典型非线性特性 四、非线性控制系统的特点
一、引言
包含一个或一个以上非线性元件或环节的系统为非线性系 统。 实际上自动控制系统的各个环节不可避免的带有某种程度 的非线性,线性系统只是非线性系统的近似。 非线性系统程度不严重时,在一定范围内或特定条件下, 可采用微偏法进行线性化,这种非线性称为非本质非线性。 如果系统的非线性具有间断点、折断点,称为本质非线性。 这时采用线性系统分析方法去研究会引起很大的误差甚至导 致错误的结论。
四、非线性控制系统的特点
3.稳定性 3.稳定性
线性系统的稳定性取决于系统的结构与参数,与起始 状态无关。 非线性系统的稳定性不仅仅和系统的结构与参数有关, 还和起始状态有直接关系。 一个非线性系统,他的某些平衡状态可能是稳定的, 某些平衡状态可能是不稳定的。因此对于非线性系统, 不存在系统是否稳定的笼统概念,要研究的是非线性系 统平衡状态的稳定性。
2 n
A +B
2 n
An ϕn = arctan Bn
一 描述函数的基本概念
非线性特性为奇对称,则直流分量 A0= 0; 同时,各谐波分量的幅值与基波相比一般都比较小; 因此,可以忽略式中的高次谐波分量,只考虑基波分量, 这种近似也称为谐波线性化。则
第七章非线性控制系统分析习题答案.

∫ ∫ 1
B=
2π
A3 sin 4 ωt
4 A3
dωt =
π
2
1
(1
− cos
2ωt) 2
dωt
1
π0
π 04
∫ [ ] A3
=
π
2 (1 − 2 c os 2ω t + c os 2 2ω t )
A3
dωt =
π
A3
π
− sin 2ωt 2
π0
π2 π
0
A 3 π c o s 4ω t + 1
G1 ( s) +G1 ( s)
4 、 判 断 题 7 -2 图 中 各 系 统 是 否 稳 定 ; −1 N( A) 与 G ( j ω ) 两 曲 线 交 点 是 否 为 自 振 点 。
2
解 :( a ) 不 是 ; ( b) 是 ; (c)是;
( d) a、c 点 是, b 点 不 是;
( e) 是 ;
( 2 ) 由 图 解 7 -5 可 见 , 当 −1 N( A) 和 G ( j ω ) 相 交 时 , 系 统 一 定 会 自 振 。 由 自 振 条 件
A + 6 −K −( A + 6) K
N ( A)G( jω ) =
=
= −1
ω =1 A + 2 2
2( A+2)
( A +6) K = 2 A +4
10
−1 0
10
G( jω ) =
=
−j
j ω( j ω + 1) ω2 + 1
ω( ω2 + 1)
自动控制7-1描述函数法.详解

x0 t ln x -1 0
由上例可见,初始条件不同,自由运动的稳定性 亦不同。因此非线性系统的稳定性不仅与系统的结构 和参数有关,而且与系统的初始条件有直接的关系。
11
所谓自激振荡是指没有外界周期变化信号的作用 时,系统内产生的具有固定振幅和频率的稳定周期运 动,简称自振。 考虑著名的范德波尔方程 - 2 ρ(1 - x 2 ) x x 0 >0 x
6
2
4
14
7.1.3 非线性系统的分析方法
到目前为止,非线性系统的研究还缺乏成熟,结论不能像 线性系统那样具有普遍意义,一般要针对系统的结构,输入及 初始条件等具体情况进行分析。工程上常用的方法有以下几种:
(1)小偏差线性化(非本质非线性) (2)描述函数法(本质非线性)
这是一种频域分析方法,其实质是应用谐波线性化的方法, 将非线性特性线性化,然后用频率法的结论来研究非线性系统。 它是线性理论中的频率法在非线性系统中的推广,这种方法不 受系统阶次的限制。
4
7.1.1 典型非线性特性的种类
1.饱和特性
-a
y
M k 0 -M a x
a为线性区宽度,k为线性区斜率。 饱和特性在控制系统中是普遍存在的,放大器及 执行机构受电源电压或功率的限制导致饱和。
5
2.死区特性 死区又称不灵敏区,在死区内虽有输入信号,但 其输出为零
y k
-a
0
a
x
| x | a 0, y = k ( x - a ), x>a k ( x + a ), x < -a
该方程描述具有非线性阻尼的非线性二阶系统。
当扰动使 x <1时,因为 - (1- x2 )<0,系统具有负阻 尼,此时系统从外部获得能量, x(t)的运动呈发散形式; 当x>1时,因为-(1-x2 )>0,系统具有正阻尼,此 时系统消耗能量,x(t)的运动呈收敛形式; 而当 x=1时,系统为零阻尼,系统运动呈等幅振荡 形式。上述分析表明,系统能克服扰动对 x的影响,保 持幅值为1的等幅振荡。 12
自动控制原理考试试题第七章习题及答案

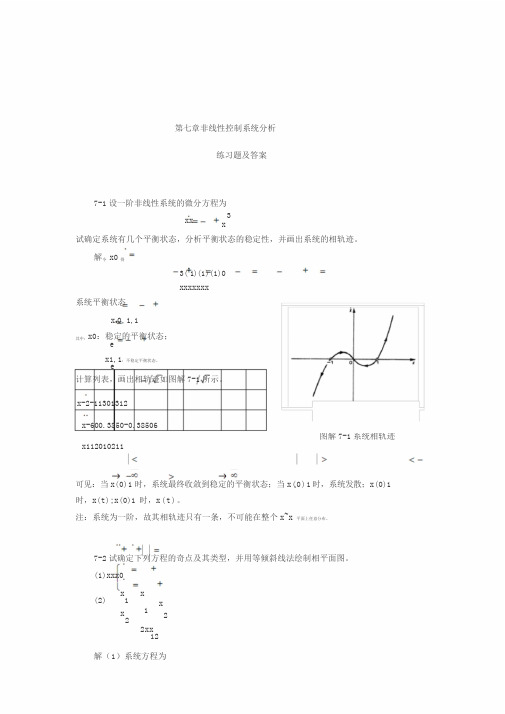
第七章 非线性控制系统分析练习题及答案7-1 设一阶非线性系统的微分方程为3x x x+-=& 试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解 令 x =0 得-+=-=-+=x x x x x x x 321110()()()系统平衡状态x e =-+011,,其中:0=e x :稳定的平衡状态;1,1+-=e x :不稳定平衡状态。
计算列表,画出相轨迹如图解7-1所示。
可见:当x ()01<时,系统最终收敛到稳定的平衡状态;当x ()01>时,系统发散;1)0(-<x 时,x t ()→-∞; 1)0(>x 时,x t ()→∞。
注:系统为一阶,故其相轨迹只有一条,不可能在整个 ~x x 平面上任意分布。
7-2 试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1) x x x ++=0 (2) ⎩⎨⎧+=+=2122112x x xx x x &&解 (1) 系统方程为x -2 -1 -13 0 13 1 2x -6 0 0.385 0 -0.385 0 6 x11 2 0 1 0211图解7-1 系统相轨迹⎩⎨⎧<=-+I I >=++I )0(0:)0(0:x x x x x x x x &&&&&&令0x x ==&&&,得平衡点:0e x =。
系统特征方程及特征根:21,221,21:10,()2:10, 1.618,0.618()s s s s s s I II ⎧++==-±⎪⎨⎪+-==-+⎩稳定的焦点鞍点(, ) , , x f x x x x dxdxx x xdx dx x x x x x==--=--==--=-+=ααβ111⎪⎪⎩⎪⎪⎨⎧<-=>--=)0(11:II )0(11:I x x βαβα计算列表用等倾斜线法绘制系统相平面图如图解7-2(a )所示。
自动控制原理考试试题第七章习题与答案
第七章非线性控制系统分析练习题及答案7-1设一阶非线性系统的微分方程为xx3 x试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解令x0得3(21)(1)(1)0xxxxxxx系统平衡状态x e0,1,1其中:x0:稳定的平衡状态;ex1,1:不稳定平衡状态。
e计算列表,画出相轨迹如图解7-1所示。
x-2-11301312x-600.3850-0.38506x112010211图解7-1系统相轨迹可见:当x(0)1时,系统最终收敛到稳定的平衡状态;当x(0)1时,系统发散;x(0)1 时,x(t);x(0)1时,x(t)。
注:系统为一阶,故其相轨迹只有一条,不可能在整个x~x平面上任意分布。
7-2试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1)xxx0(2) x1x2xx122xx12解(1)系统方程为1:xxx0(x0):xxx0(x0)令xx0,得平衡点:x e0。
系统特征方程及特征根:132:ss10,sj(稳定的焦点)1,2222:ss10,s1.618,0.618(鞍点)1,2xf(x,x)xx, d xdxxxxdx dx 1xx,1xxx11I:1(x0)1II:1(x0)计算列表-∞-3-1-1/301/313∞x0:11-1-2/302-∞-4-2-4/3-1x0:11-1-4/3-2-4∞20-2/3-1用等倾斜线法绘制系统相平面图如图解7-2(a)所示。
2图解7-2(a)系统相平面图(2)xxx112①x22xx②12由式①:x2x1x1③式③代入②:(x1x1)2x1(x1x1)即x12x1x10④令x1x10得平衡点:x e0由式④得特征方程及特征根为2.4142ss2101,2(鞍点)0.414画相轨迹,由④式xx 11 d x1dxx12x1x1x 1 x1 2计算列表322.53∞11.52=1/(-2)∞210-1-2∞用等倾斜线法绘制系统相平面图如图解7-2(b)所示。
自动控制原理-第七章 非线性系统分析
p p p ( x1 , x 2 ) ( x1 x 10 ) ( x 2 x 20 ) x1 x 2 Q ( x , x ) Q ( x x ) Q ( x x ) 1 2 1 10 2 20 x1 x 2
p ( x1 , x 2 ) a ( x1 x10 ) b( x 2 x 20 ) Q( x1 , x 2 ) c( x1 x10 ) d ( x 2 x 20 )
c 区域: a Tc c k m
c k m c 1 (k m c) T T ct 0 由奇点定义: k m c 0 c 常数 c k m 1 k m c dc T dc c 区域: c 常数 奇线: c k m
§7-4
奇点及极限环
dx 0 奇点概念:相轨迹上满足 dx 0 不定式的特殊点,称为奇点。
在奇点处有多条相轨迹穿过或趋于该奇点,相当于系统处于 平衡状态 一 奇点分类:(线性系统)
2 2 n x n x 0 x 2 2 n x n x x dx 2 x dx 2 n x n x dt (*) 相轨迹方程 dx x dx x dt
介绍:典型非线性特性、相平面法、描述 函数法
§7-1引言
稳定性 1.线性系统与非线性系统区别: 输出曲线 等幅振荡 稳态输出
2.非线性特性(典型) 1)死区
0 x a y k ( x a ) x a k ( x a ) x a
0 = k ( x aSignx)
x1 a ( x1 x 10 ) b( x 2 x 20 ) x 2 c( x1 x10 ) d ( x 2 x 20 )
自动控制原理第七章

解:1.将继电特性的参数代入相应公式得到:
4B 12 a 1 N ( A) 1 1 A A A A
2 2
1 πA N(A) 12 1 - 1 2 A
根据
( N (1A) ) ( )
a A
0,求得
1 π 的极值为 6 N ( A)
7.4.2 非线性系统结构的简化
非线性环节串联 若两个非线性环节串联,可将两个环节 的特性归化为一个特性,即以第一个非线性 环节的输入和第二个非线性环节的输出分别 作为归化后非线性特性的输入和输出,从而 作出等效非线性特性。注意,若两个非线性 特性的描述函数分别为 N1 ( A)和 N 2 ( A,等效非 ) 线性的描述函数为 N ( A)绝不等于 N1 ( A和 的 ) ) N2 (A 乘积,并且串联非线性环节的次序不可交换。 对于多个非线性环节串联,其处理方法可以 按照串联的次序,先归化前两个非线性环节, 等效后的非线性特性再与第三个环节进行归 化变换。 非线性环节并联 若两个并联的非线性环节其描述 函数分别为 和 N ( A) ,则并联后的 N 2 ( A) 1 等效非线性环节的描述函 数 。
7.2 典型非线性特性及其对系统的影响
间隙特性
也称回环,机械传动中为保证齿轮转动灵活不卡齿,主动轮、从动 轮齿轮之间必须有适当的间隙存在,使得两者不能同步运转,即从 动轮滞后主动轮。含有间隙特性的系统,其输出相位滞后于输入相 位,从而减小了系统的相稳定裕度,使系统的稳定性变坏,同时增 大了系统的稳差。
7.3 描述函数法
7.3.2 非线性特性的描述函数
非线性特性 描 述 函 数
7.3 描述函数法 描 述 函 数
非线性特性
7.4 用描述函数法分析非线性控制系统
第七章非线性系统的分析
2、死区非线性
x1 ≤ ∆ 0, x2 = k ( x1 − ∆signx1 ), x1 > ∆
1 signx1 = −1
x1 > 0 x1 < 0
在实际系统中死区可由众多原因引起,它对系统可产生不同的 影响:一方面它使系统不稳定或者产生自振荡;另一方面有时 人们又人为的引入死区特性,使系统具有抗干扰能力。
第七章 非线性控制系统
7-2
1、饱和非线性
kx1 = x2 = ka x2 m −ka = − x 2m
典型非线性环节
x1 < a x1 ≥ a x1 ≤ −a
x2m
x2
−a
0
k
a
x1
此处:输入 x1 − − − − x2 − − − −输出 k − − − −比例系数
− x2m
第七章 非线性控制系统
第七章 非线性控制系统
4)混沌(Chaos)
蝴蝶效应( The Butterfly Effect) 是指在一个动力系统中,初始条 件下微小的变化能带动整个系统 的长期的巨大的连锁反应。这是 一种混沌现象。 核心理念:看似微不足道的细小 变化,却能以某种方式对社会产 生微妙的影响,甚至影响整个社 会系统的正常运行。
第七章 非线性控制系统
r(t)
e(t)
N(A,ω) NLS
x(t)
G(s)
c(t)
非线性系统的闭环“传递函数”:
G ( jω ) N ( A, ω ) Φ ( jω ) = 1 + G ( jω ) N ( A, ω )
0 闭环“特征方程”: 1 + G ( jω ) N ( A, ω ) =
即
1 G ( jω ) = − N ( A, ω )
7-1描述函数法
相平面法是求解一、二阶常微分方程的图解法。通过在相
平面上绘制相轨迹,可以求出微分方程在任何初始条件下的解。 这是一种时域分析法,但仅适用于一阶和二阶系统。
(4)计算机求解法
用模拟计算机或数字计算机直接求解非线性微分方程,对于12 分析和设计复杂的非线性系统是非常有效的方法。
1
第七章 非线性系统
内容提要 7.1 典型非线性特性 7.2 描述函数法 7.3 相平面法 学习指导与小结
2
※7.1 典型非线性特性
前面各章研究的都是线性系统,或者虽然是非线 性系统,仍可进行线性化处理,从而可视为线性系统。 事实上,几乎所有的实际控制系统,都不可避免地带 有某种程度的非线性、系统中只要具有一个非线性环 节,就称为非线性系统。因此实际的控制系统大都是 非线性系统。本章将主要讨论关于非线性系统的基本 概念,以及两种基本分析方法:描述函数法和相平面 法。
0
14
由于在傅氏级数中n越大,谐波分量的频率越高,An, Bn越小。此时若系统又满足第三个条件,则高次谐波 分量又进一步被充分衰减,故可认为非线性环节的稳
态输出只含基波分量,即
y(t) y1(t) A1 cost B1 sin t Y1 sin(t 1)
式中
A1
1
x 2(1 x 2 )x x 0 >0
该方程描述具有非线性阻尼的非线性二阶系统。
当扰动使x<1时,因为(1x2 )<0,系统具有负阻
尼,此时系统从外部获得能量,x(t)的运动呈发散形式;
当x>1时,因为(1x2 )>0,系统具有正阻尼,此
时系统消耗能量,x(t)的运动呈收敛形式;而当x=1时, 系统为零阻尼,系统运动呈等幅振荡形式。上述分析表 明,系统能克服扰动对x的影响,保持幅值为1的等幅振 荡。
7-1 离散系统的基本概念

e*(t) A(t) τ
e*(t)
理想化后: τ→0
t T t
T
矩形面积:s=A(t)×τ
τ :脉冲宽度 A(t):幅度
由定义: B(t ) (t )dt A(t )
0-
0+
由脉冲函数定义,在0-~0+脉冲强 0 度B(t)可视为不变数。而 0 (t )dt 1
所以:B(t)= A(t)×τ
a.开环采样系统:采样器位于系统闭合回路之外, 或系统本身不存在闭合回路。 b.闭环采样系统:采样器位于系统闭合回路之内。 而在实践中用得最多的是:误差采样控制的闭环系统。 误差采样:采样开关设在误差比较点之后。 s:采样开关,τ→0
r(t) e(t) S e*(t) eh(t) c(t)
Gh(s)
e*(t)
e*(t) 信号复现滤波器
(保持器)
eh(t)
e*(t)(t) eh
保持器输入信号
t
保持器输出信号
t
图7-3 保持器的输入与输出信号
保持器可把脉冲信号e*(t)复现为阶梯信号eh(t); 当采样频率足够高时,eh(t)接近于连续信号。
(2) 采样系统的典型结构图
根据采样器在系统中所处的位置不同,可以构成各种采 样系统。
第七章 线性离散系统的分析与校正
7-1 离散系统的基本概念 7-2 信号的采样与保持 7-3 z变换理论 7-4 离散系统的数学模型 7-5 离散系统的稳定性与稳态误差 7-6 离散系统的动态性能分析 7-7 离散系统的数字校正
学习目的
由于数字技术的迅速发展,特别是计算机技术的 发展,数字控制在许多场合取代了模拟控制器,作为 分析与设计数字控制系统的理论基础,离散系统控制 理论发展也非常迅速。 离散控制系统与连续控制系统既有本质上的不同, 又有分析研究方面的相似性,利用z变换法研究离散 系统,可以把连续系统中的许多概念和方法推广到线 性离散系统。 通过本章学习,建立有关离散控制系统的概念, 掌握数字控制中采样和保持这二个信号变换过程及数 学描述,了解z变换理论,建立离散系统的数学模型, 掌握离散系统的分析和校正方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
-a
a
x
2.死区特性 死区又称不灵敏区,在死区内虽有输入信号,但 其输出为零。
y k
-a
0
a
x
0,| x | a y k ( x a ), x a k ( x a ), x a
6
y b x -a
y b 0 -b a x -a
y
b
0
-b
0
a
x
-b
(1) 若a=0,称这种特性为理想继电器特性所示。 (2) 若m=1,称为死区继电器特性。 (3) 若m=-1,滞环继电器特性。
实际系统中,各种开关元件都具有继电器特性。
7
7.1.2 非线性系统的若干特征
由于上述非线性特性的存在,与线性系统相比, 非线性系统具有如下特点:
n 1
非线性环节奇对称,则有A0=0
1 An 1 Bn
2
0 2
y (t ) cos n td t y (t ) sin n td t
1
第七章 非线性系统
内容提要
7.1
7.2 7.3
典型非线性特性
描述函数法 相平面法
学习指导与小结
2
※7.1
典型非线性特性
前面各章研究的都是线性系统,或者虽然是非线 性系统,仍可进行线性化处理,从而可视为线性系统。 事实上,几乎所有的实际控制系统,都不可避免地带 有某种程度的非线性、系统中只要具有一个非线性环
9
所谓自激振荡是指没有外界周期变化信号的作用 时,系统内产生的具有固定振幅和频率的稳定运动, 简称自振。 考虑著名的范德波尔方程 2 (1 x 2 ) x x 0 >0 x
该方程描述具有非线性阻尼的非线性二阶系统。
当扰动使 x<1 时,因为 (1x2 )<0 ,系统具有负阻 尼,此时系统从外部获得能量, x(t) 的运动呈发散形式; 当 x>1时,因为 (1x2 )>0,系统具有正阻尼,此 时系统消耗能量,x(t)的运动呈收敛形式;而当x=1时, 系统为零阻尼,系统运动呈等幅振荡形式。上述分析表 明,系统能克服扰动对x的影响,保持幅值为1的等幅振 荡。 10
(1)小偏差线性化(非本质非线性) (2)描述函数法(本质非线性)
这是一种频域分析方法,其实质是应用谐波线性化的方法, 将非线性特性线性化,然后用频率法的结论来研究非线性系统。 它是线性理论中的频率法在非线性系统中的推广,这种方法不 受系统阶次的限制。
(3)相平面法(本质非线性)
相平面法是求解一、二阶常微分方程的图解法。通过在相 平面上绘制相轨迹,可以求出微分方程在任何初始条件下的解。 这是一种时域分析法,但仅适用于一阶和二阶系统。
非线性系统对于正弦输入信号的响应则比较复杂, 会产生一些比较奇特的现象。例如跳跃谐振和多值响 应、波形畸变、倍频振荡和分频振荡等。 考虑有名的杜芬方程
fx k1 x k3 x 3 p cos t m x
x 1
6 5
2
3
4
11
7.1.3 非线性系统的分析方法
到目前为止,非线性系统的研究还缺乏成熟,结论不能像 线性系统那样具有普遍意义,一般要针对系统的结构,输入及 初始条件等具体情况进行分析。工程上常用的方法有以下几种:
3. 滞环特性 滞环特性表现为正向与反向特性不是重叠在一起 ,而是在输入—输出曲线上出现闭合环路。又称为间 隙特性。
5
b -a 0
y
a -b
x
k ( x asign x ) y 0 y y0 bsignx
4 继电器特性
y b
-a -ma
0 ma -b a
ma x a, x 0 0 a x ma, x 0 0 y bsignx | x | a x b x ma, x 0 x ma, x 0 b
(1)稳定性的复杂性。
(2)可能存在自激振荡现象 。
x(t)
(3)频率响应。
x 2 x x( x 1) x
1
x0>1
x0<1
设t = 0,系统的初始状态为x0 0
dx dt x( x 1)
x0 e t x(t ) 1 x 0 x 0 e t
x0 t ln x 1 0
节,就称为非线性系统。因此实际的控制系统大都是
非线性系统。本章将主要讨论关于非线性系统的基本 概念,以及两种基本分析方法:描述函数法和相平面 法。
3
7.1
典型非线性特性
在控制系统中,若控制装置或元件其输入输出 间的静特性曲线,不是一条直线,则称为非线性特 性。如果这些非线性特性不能采用线性化的方法来 处理,称这类非线性为本质非线性。为简化对问题 的分析,通常将这些本质非线性特性用简单的折线 y 来代替,称为典型非线性特性。 7.1.1 典型非线性特性的种类 1.饱和特性
c( t )
(2)非线性环节的输入输出3
2.描述函数的定义 设系统的非线性环节输入信号是正弦信号 x(t) = Asint 则其输出一般为周期性的非正弦信号,可以展成傅 氏级数 y (t ) A0 ( An cos n t B n sin n t )
8
相应的时间响应随初始条件而 变。
x(t) x0>1
当x0 >1,t <lnx0/(x0 1) 时,随t 1 增大,x(t) 递增;t = lnx0 /(x0 1) 时,x(t)为无穷大。
0
x0<1
当x0<1时,x(t) 递减并趋于0。
x0 t ln x 1 0
由上例可见,初始条件不同,自由运动的稳定性 亦不同。因此非线性系统的稳定性不仅与系统的结构 和参数有关,而且与系统的初始条件有直接的关系。
(4)计算机求解法
用模拟计算机或数字计算机直接求解非线性微分方程,对于 12 分析和设计复杂的非线性系统是非常有效的方法。
※7.2
描述函数
7.2.1 描述函数的定义 1. 描述函数的应用条件 (1)非线性系统的结构图可简化成一个非线性环 节N和一个线性部分G(s)串联的闭环结构。
r(t)=0
x
y
N G(s)