HM六面体网格思路
HyperMesh六面体网格划分浅谈

HyperMesh六面体网格划分浅谈/simxpert/blog/item/50fe1150eedba7868c543070.html最近总有初学Hypermesh的朋友跟我抱怨说hypermesh六面体网格划分真难掌握,根据我的个人经验,简单谈谈我的个人看法:六面体划不好,往往是面网格划分和一些面网格处理技巧没掌握好。
六面体的划分,包括两个部分,一是分块策略和划分顺序,二是网格划分。
六面体划分唯一的真正的难点就在分块策略,分块策略与hypermesh 没有直接的关系,完全取决于你个人对于结构拓扑关系的理解。
不同的人,分块思路可能不一样,对复杂结构的分块能力有差异。
分块策略和划分顺序安排好了之后,剩下的就是用solidmap 划分六面体,这个毫无难度可言,整个过程完全流程化了。
新手觉得难,主要是以下问题:1. 分块策略。
这个就不说了,分块策略对老手也是难点。
2.心中已有分块策略,具体实施过程出错,不知道该如何切割几何。
这个其实就是没有掌握好切割几何等基本操作了。
3.块分好了,在使用solidmap,line drage, linear solid的过程中出现错。
出错的地方可能就是不知道solidmap 的各个参数该如何正确设置,就一个solidmap有那么难么?其实是缺乏静下心来做例子的耐性。
另外一个出错的地方,是面网格联结方面,在使用solidmap之前,经常需要对面网格进行处理,很多人在这里出错,主要是面网格划分和处理技巧不过关。
HM的网格划分的精华就在面网格。
几乎所有的技巧,都包含在面网格划分过程中,如果你把面网格划分技巧运用熟练,六面体体网格划分只是不过是分块和反复使用solimap而已。
因此,对于新手来讲,应该多花点时间把面网格划分的各种技巧掌握好,面网格技巧掌握好了,六面体网格是水到渠成的事情。
有限元六面体网格的典型生成方法及发展趋势
有限元六面体网格的典型生成方法及发展趋势吕 军,王忠金,王仲仁(哈尔滨工业大学材料科学与工程学院,黑龙江哈尔滨150001)摘 要:工程问题三维有限元仿真的主要困难是模型的建立,而模型的建立需要采用合适的方法来生成高质量的三维有限元网格.以金属塑性成形过程的三维有限元仿真为例,说明了采用六面体单元的必要性.针对典型的有限元六面体网格生成方法,系统地分析了各种方法的实现原理和发展趋势,并探讨了六面体网格生成总的发展趋势.分析结果说明,复杂域内六面体网格全自动生成的实现是全自动网格生成真正走向实用化、通用化必须解决的难题.关键词:数值仿真;有限元法;网格生成;六面体网格中图分类号:TG 302 文献标识码:A 文章编号:036726234(2001)0420485206G eneration of f inite element hexahedral mesh and its trend of developmentL αJ un ,WAN G Zhong 2jin ,WAN G Zhong 2ren(School of Materials Science and Engineering ,Harbin Institute of Technology ,Harbin 150001,China )Abstract :The major difficulty with the 3-D finite element simulation of an engineering problem lies in the construction of models ,which needs the proper generation of 3-D finite element hexahedral mesh of high quality.The necessity to use a hexahedral unit is justified by taking the 3-D finite element simulation of the plastic formation of metals as an example.The theories behind and trends of development of different ways of generating finite element hexahedral meshes are systematically analysed ,and the general trend of development for generation of hexadedral mesh is discussed as well.It is concluded that the full automatic generation of hexahedral mesh in complex domains is the key to the popularization of full automatic genera 2tion of hexahedral mesh.K ey w ords :numerical simulation ;finite element method ;mesh generation ;hexahedral mesh 有限元法是求解工程问题的一种近似数值方法,近年来在工程领域中得到了广泛的应用[1,2].有限元仿真的一个重要步骤是对连续体进行离散化,为使离散出的网格能更精确地逼近连续区域和有限元计算的结果在预定误差范围内,应保证离散化后得到质量较高的网格.为此提出了许多方法来生成有限元网格[35].目前,二维有限元收稿日期:2001-01-20.基金项目:金属精密热加工重点实验室基金资助项目.作者简介:吕 军(1974-),男,博士研究生;王仲仁(1934-),男,教授,博士生导师.网格生成方面已比较成熟,提出了许多行之有效的方法.但在三维有限元网格尤其是六面体网格的生成方面还没有通用的算法,存在许多难点问题需进一步解决.本文论述了采用六面体单元的必要性,并分析了有限元六面体网格的典型生成方法.最后,对六面体网格生成的发展趋势进行了探讨.1 采用六面体单元的必要性在有限元仿真过程中,单元类型的选择对整个有限元仿真的计算效率、自动化程度、计算精度等都将产生重要影响.因此单元类型的选择在各 第33卷 第4期 哈 尔 滨 工 业 大 学 学 报 Vol.33,No.42001年8月 J OURNAL OF HARB IN INSTITU TE OF TECHNOLO GY Aug.,2001个领域的有限元仿真中都占有重要地位.在体积成形刚塑性/刚粘塑性有限元仿真中,单元类型选择的重要性尤为突出.这是因为刚塑性/刚粘塑性有限元仿真有三个突出的特点:(1)塑性成形往往是一个大变形过程,有限元计算中通常需要进行多次网格重划分,而网格重划分需要耗费大量的时间,且每次都会损失一定的精度.(2)塑性变形过程是一个非线性问题,需要进行迭代求解,计算效率问题更为突出.(3)刚塑性/刚粘塑性有限元仿真时必须进行多次工件与模具间的动态接触处理,每一次的处理都会使得工件的有限元模型产生一定的体积损失而影响计算精度.这三种问题的处理都与单元类型的选择密切相关.选择合理的单元类型,就可用较少的网格重划分次数、相同或较少的高斯积分点数来达到较高的计算精度和计算效率,这在有限元仿真中是非常重要的.六面体单元由于变形特性好、计算精度高等优点而在很多三维有限元仿真领域中得到了广泛的应用.在金属体积成形的三维有限元仿真中,要求单元既要有一定的“刚性”(即抗畸变能力)以避免频繁的网格重划分,又要有一定的“柔性”(即良好的变形特性)以准确地仿真变形过程,还必须有较高的计算精度.在体积成形三维有限元仿真中常采用四面体和六面体单元.大量计算结果表明:采用六面体单元进行三维有限元仿真可采用较少的网格重划分次数达到较高的计算精度,故六面体单元是金属体积成形过程三维有限元仿真的首选单元[6,7].2 有限元六面体网格的典型生成方法六面体网格在三维有限元仿真中有四面体网格无法比拟的优越性,但现有的有关三维有限元网格生成方法的文献往往偏重于介绍四面体网格的生成方法,对六面体网格生成方法介绍得很少.实现可靠的、高质量的六面体有限元网格自动生成是三维有限元仿真领域的瓶颈问题.当前,有限元六面体网格的典型生成方法主要有以下几种.2.1 映射单元法映射单元法是三维网格生成中最早使用的方法之一.这种方法先把三维实体交互地分成几个大的20节点六面体区,然后使用形函数映射技术把各个六面体区域映射为很多细小的8节点六面体单元[8].这种方法易于实现,可以生成规整的结构化网格;缺点是当三维实体的表面是十分复杂的自由曲面时,该方法的逼近精度不高,且人工分区十分麻烦、难以实现自动化.近年来,一些研究者采用“整体规划技术(Integer programming technique)”来进行实体的自动分区[9],但该技术很难对复杂形体(如塑性加工中的复杂锻件)进行自动分区.曲面映射是三维映射的特例,采用曲面映射技术可以对几何曲面进行离散化处理[10,11].文献[12]详细研究了基于映射单元法的有限元六面体网格自动生成技术,采用加权因子控制网格生成过程中自然坐标的分割,可以生成密度不同的有限元网格.对原域为单连通凸区域的简单形体及原域为复连通凹区域的复杂形体,该种方法均可生成质量较高的网格,生成的六面体网格如图1所示.图1 映射单元法Fig.1 Mapped element method 映射单元法的发展趋势是:实现简单、规则形状形体的自动分区,提高手工分区的交互性,能方便地进行复杂的三维形体的分区.2.2 基于栅格法这种方法预先产生网格模板,然后将要进行网格化的物体加到其上,并在实体内部尽可能多地填充规则的长方体或正方体网格,在实体的边界上根据实体边界的具体特征更改网格的形状和相互连接关系,使得边界上的六面体单元尽可能地逼近物体的边界形状.文献[13]采用这种方法生成了六面体单元.这种方法能实现网格生成的自动化,网格的生成速度也非常快.其最大弱点是边界单元的质量较差;另一个缺点是所生成的单元尺寸相近,网格密度很难得到控制.1998年发布的MARC/HexMesh模块中采用了基于栅格法,并对这种方法进行了改进,使得初始填充在实体内部的单元尺寸较大、实体边界单元的尺寸较小,这样可以较好地控制网格密度[14].但是,对于复杂三维形体,MARC/ HexMesh模块产生的边界六面体网格的质量仍然不够理想.Tekkaya[15]将改进八叉树法与基于・684・哈 尔 滨 工 业 大 学 学 报 第33卷栅格法相结合来生成边界过渡网格,首先根据工件的边界来区分内部网格和边界网格,然后应用网格细化和均匀化处理来改进边界单元的质量,如图2所示.图2 基于栅格法Fig.2 Grid 2based method 这种方法的发展趋势是:控制实体内部的初始规则网格的尺寸,以控制最终形成的网格的密度;采用网格结构重组(包括拆分和合并单元)和网格优化算法来提高边界单元的质量.2.3 几何变换法这种方法由二维四边形网格经过旋转、扫描、拉伸等几何变换而形成六面体网格,几何变换后删除重节点及四边形、进行单元及节点的重新编号[16].这种方法生成的六面体网格如图3所示;优点是比较容易实现,在当今大多数的大型CAD 软件前置处理中均有此功能.但是,这种方法只适用于形状简单的三维形体,且主要依靠人机交互的方式来实现.图3 几何变换法Fig.3 G eometry transformation method 这种方法的发展趋势是使四边形有限元网格能够以自由曲线为路径进行扫描,尽量减少人机交互的步骤.2.4 改进八叉树法这种方法的基础是三维物体的八叉树表示.所作的改进类似于四叉树法的改进,但三维物体的边界处理更加复杂;它具有改进四叉树法同样的利弊.Y erry 等[17]首先提出并实现了这种方法,他们将物体边界简化为42种可能的模式(18种单平面和24种双平面切割八叉元).这种方法与基于栅格法结合生成“过渡网格”,效果较好[15].著名的有限元分析软件MARC/Auto 2Forge 模块中采用了这种方法,生成的六面体网格如图4所示.图4 改进八叉树法Fig.4 Modified 2octree method 这种方法的发展趋势是:与基于栅格法结合使用来提高过渡网格的质量,并减少仿真过程中的畸形单元,提高形体尖角处单元的质量.2.5 模块拼凑法Yang 等[18,19]把工件分为一定数量的子模块,然后对每一类形状简单的子模块规定一种六面体网格生成方法,整个工件的有限元网格即可由这些子模块内的网格拼凑而成,如图5所示.但是,实际生产中的工件(尤其是模锻件)的形状往往非常复杂,很难对其进行子模块的自动划分,采用专家系统的方法往往也是不可行的.因此,这种方法只能针对形状相对简单和变化较少的工件来生成六面体网格. 这种方法的发展趋势是完善专家系统的知识库,使其能适应更复杂形状工件的子模块自动划分.2.6 单元转换法由于多种四面体网格自动生成算法已经达到实用化的程度,在自动生成四面体网格后,可以把一个直边四节点四面体单元分成四个六面体单元[20,21],这样可以把四面体网格自动地转化为六面体网格,如图6所示.这种方法的缺点是得到的网格是杂乱无章的非结构化六面体网格,网格的质量不高;为了较好地逼近复杂物体的曲面边界,需要生成较多的直边四面体单元,因而也将得到数量极多的六面体单元,这会使得有限元仿真的时间过长.对同时具有内外复杂边界的三维问题(如内部有空洞缺陷的复杂锻件分析),该方法是实现六面体网格自动生成的一种比较有效的方・784・ 第4期 吕 军,等:有限元六面体网格的典型生成方法及发展趋势法.文献[22]对单元转换法进行了改进,将十节点曲边四面体转换为六面体,并采用非线性约束优化算法大幅度提高了六面体网格的单元质量.图5 模块拼凑法Fig.5 Modular method图6 单元转换法Fig.6 Element conversion method 这种方法的发展趋势是减少不必要的四面体单元的数量,采用网格结构重组技术以剔除不必要的单元,采用约束优化算法提高六面体单元的质量.2.7 B 样条曲面拟合插值法这种方法基于三维物体的边界曲面B 样条表示,采用插值拟合曲面来生成六面体网格[23].在几何构形确定的情况下,这种方法即可自动生成六面体网格.通过调整B 样条函数中的参数可以控制网格密度,生成的六面体网格如图7所示.这种方法的优点是边界曲面逼近好,形体的几何表示与网格生成在数学方法上一致;缺点是局部网格的处理比较困难,这是整体域剖分所带来的问题.图7 B 样条曲面拟合插值法Fig.7 B 2spline surface interpolation method 这种方法的发展趋势是采用B 样条曲面和实体造型相结合的方式来描述三维物体,采用模块法来处理物体内部的局部网格.2.8 采用波前法逐层由实体表面向实体内部生成六面体网格(Plastering algorithm)Blacker 和Meyers [24]于1993年提出了这种方法,该方法实际上是二维四边形网格逐层推进生成法[25](Paving algorithm )在三维空间上的拓展.在三维实体内部,各个六面体单元的边与边、面与面之间的相互关系十分复杂,并且只有满足一定条件的实体表面上的节点才能生成完全的六面体网格,故这种方法的实现具有很高的难度.生成的网格如图8所示.该方法生成的六面体网格的单元质量(尤其是边界单元的质量)是所有算法中最好的,但该方法的实现仍需解决一些技术细节上的问题.图8 Plastering 算法Fig.8 Plastering algorithm 这种方法的发展趋势是优化实体表面的布点,避免在向实体内部逐层推进时产生尺寸过小和形状不合理的单元,避免单元间的裂缝.2.9 采用中轴面分解和整体规划技术生成六面体网格这种方法首先将三维实体分解成一定数量的简单子域,然后在每个子域内生成六面体网格[26].在将实体分解成子域过程中采用中轴面(Medial Surface )分解技术,并采用整体规划技术来确定每条边的分割数,进而控制六面体网格的密度[9].根据形体的中轴面可以确定必要的子域,子域可以定义为13种可能类型中的一种[27].中轴面分解方法也可以拓展应用于带有凹边或凹顶点的实体及退化情况,从而可以实现复杂实体(如带有孔、凹角等)的六面体网格生成[28].该方法生成的六面体网格的单元质量很高并且疏密有致,如图9所示. 这种方法的发展趋势是实现复杂形体的全自动中轴面分解;尽可能形成容易网格化的子域;提高边界单元的质量,避免产生形状不好的单元(如・884・哈 尔 滨 工 业 大 学 学 报 第33卷狭长单元).图9 中轴面分解法Fig.9 Medial surface subdivision method3 六面体网格生成的发展趋势有限元六面体网格生成问题近年来成为三维网格生成方法研究的热点和难点,出现了许多种算法,但至今尚未提出一种通用的有限元六面体网格自动生成方法.下列问题将成为六面体网格生成的研究前沿,也将是未来的发展趋势.3.1 开发复杂域六面体网格的全自动生成方法全自动网格生成方法因其高效性、处理复杂情况的能力和便于集成到计算机集成制造系统(CIMS )等优点,已成为网格生成的发展趋势.现有的网格自动生成方法在时效、稳定性和通用性等方面与实用要求都有一些差距,六面体网格生成方面尤为突出,问题的关键在于开发有效、高效的自动生成方法.复杂域的网格生成是全自动网格生成的前提,人们正在研究能在任意复杂域内生成六面体网格的方法,并注重方法的可靠性.复杂域内六面体网格全自动生成的实现是全自动网格生成真正走向实用化、通用化必须解决的难题.3.2 网格密度定义和控制技术的研究三维网格密度定义和控制一直没有行之有效的方法,生成疏密有致的六面体网格并且使密网格和疏网格之间的单元均匀过渡将是六面体网格生成的发展趋势之一.3.3 基于几何造型的六面体网格生成及其集成基于几何造型的网格生成是通往有限元仿真技术集成到计算机集成制造系统的必由之路,目前的网格生成方法大都从造型系统中得到形体描述,但几乎都与造型系统松散结合.实现六面体网格生成与几何造型系统的集成将是未来的发展方向.3.4 六面体网格显示技术及正确性检测六面体网格缺乏有效的显示技术.正因为缺乏直观的显示来验证其正确性,其正确性的检测就显得格外重要;目前在这方面尚缺乏快速有效的方法.六面体网格显示技术的关键是提出正确、可靠和高效的消隐处理算法.4 结 论在三维有限元仿真中采用六面体单元有很多优点,实现可靠、高质量的有限元六面体网格自动生成一直是CAD/CAE 领域内的一个难点,也是制约三维有限元仿真走向实用化的瓶颈问题.解决这个问题的关键是在现有方法的基础上提出稳定、高效和通用的复杂域六面体网格全自动生成方法,以使得六面体网格在三维有限元仿真领域中的应用真正走向实用化.参考文献:[1]GHOUAL I M A ,DUVAU T G.Local analytical de 2sign sensitivity analysis of the forging problem using FEM[J ].Comput Methods Appl Mech Eng ,1998,163:55270.[2]FISH F ,PANDHEERADI M ,BEL SKY V.E fficient solutions schemes for interface problems[J ].Finite El 2ements in Analysis and Design ,1996,22:2672280.[3]施云生,沈国强.基于边界适应的有限元网格自动生成及局部调整技术[J ].锻压技术,1998(4):28230.[4]JOUN M S ,L EE M C.Quadrilateral finite element generation and mesh quality control for metal forming simulation[J ].Int J Num Methods Eng ,1997,40:405924075.[5]JOE B.Tetrahedral mesh generation in polyhedral re 2gions based on convex polyhedron decompositions[J ].Int J Num Methods Eng ,1994,37:6932713.[6]SCHN EIDERS R.A 2grid based algorithm for the gen 2eration of hexahedral element meshes [J ].Eng with Comput ,1996(12):1682177.[7]TEKK A Y A A E ,K AVA K L I S.3-D simulation of metal forming processes with automatic mesh genera 2tion[J ].Steel Res ,1995,66(9):3772383.[8]COO K W A ,OA KES W R.Mapping methods for generating three 2dimensional meshes [J ].Comput in Mech Eng ,1982,8:67272.[9]TAM T ,ARMSTRON G C G.Finite element mesh controlled by integer programing [J ].Int J Num Methods Eng ,1993,36:258122605.[10]VARDHAN I K V R ,PRASAD N S.Mesh genera 2tion for spherical and conical surfaces using transfinite interpolation[J ].Comput &Struct ,1989,32(6):135921362.[11]LAU T S ,LO S H.Finite element mesh generation・984・ 第4期 吕 军,等:有限元六面体网格的典型生成方法及发展趋势over analytical curved surfaces[J].Comput&Struct,1996,59(2):3012309.[12]蒋浩民,刘润广,王忠金,等.基于映射法的三维有限元网格自动划分[J].塑性工程学报,1998,5(3):27231.[13]L EE Y K,Y AN G D Y.A new automatic mesh gen2eration technique and its application to the finite ele2 ment analysis of practical forging process[J].AdvTech Plasticity,1996,1:4092413.[14]News Letter[J].Nippon MARC Analysis Res Corpo2ration Japan,1998,3:9.[15]TEKK A Y A A E.Fully automatic simulation of bulkmetal forming processes[A].Proc NUMIFORM’98[C].Rotterdam:Netherlands,1998.[16]NA GESH K,SRIK AN T A.Automatic mesh genera2tion in2-D and3-D objects[J].Adv Eng S oft2 ware,1989,11(1):19225.[17]YERR Y M A,SHEPHARD M S.Automatic threedimensional mesh generation by the modified2octreetechnique[J].Int J Num Methods Eng,1984,20(11):196521990.[18]Y AN G D Y,Y OON J H,L EE N K.Modularremeshing:a practical method of3-D remeshing inforging of complicated Parts[J].Adv Tech Plasticity,1990,1:1712178.[19]Y OON J H,Y AN G D Y.A three dimensional rigid2plastic finite element analysis of bevel gear forging byusing a remeshing Technique[J].Int J Mech Sci,1990,32(4):2772291.[20]陈 军.虚拟模具制造及金属成形过程三维仿真技术[D].上海:上海交通大学,1996.[21]XIE G,RAMAEKER J A H,Graded mesh genera2tion and transformation[J].Finite Elements in Analy2sis and Design,1994,17:41255.[22]左 旭.集成于CAD系统的汽车零件多工位体积成形三维CAE仿真[D].上海:上海交通大学,1998.[23]王忠金.模锻过程的三维数值模拟及连杆终锻成形规律的研究[D].长春:吉林工业大学,1995.[24]BLACKER T D,MEYERS R J.Seams and wedgesin plastering:a3-D hexahedral mesh generation al2gorithm[J].Eng with Comput,1993,9:83293. [25]BLACKER T D,STEPHENSON M B.Paving:anew approach to automated quadrilateral mesh genera2tion[J].Int J Num Methods Eng,1991,32:8112847.[26]L I T S,MCKEA G R M,ARMSTRON G C G.Hex2ahedral meshing using midpoint subdivision and integerprogramming[J].Comput Methods Appl Mech Eng,1995,124:1772193.[27]PRICE M A,ARMSTRON G C G,SABIN M A.Hexahedral mesh generation by medial surface subdivi2sion:PartⅠ.solids with convex edges[J].Int JNum Methods Eng,1995,38:333523359.[28]PRICE M A,ARMSTRON G C G.Hexahedral meshgeneration by medial surface subdivision:PartⅡsolids with flat and concave edges[J].Int J NumMethods Eng,1997,40:1112136.(责任编辑 王小唯)・94・哈 尔 滨 工 业 大 学 学 报 第33卷。
六面体网格划分教程2014-2-21

这里没有唯一解!
Copyright © 2013 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved.
实体映射划分—可映射形状
• Solid Map 需要具有可映射形状的实体几何 • 可映射形状的定义为:
这个面板允许你通过已存在的2D单元,基于你输入的参数进行3D网格的划分 使用general 下的子面板可以灵活的使用各种可能的方法控制网格的划分
“Solid Map” 面板 Mesh > Create > Solid Map Mesh > line drag
使用线拉伸(line drag)子面板先选择2D网格,再选择几何模型的一条线作为映射方向
• • • • •
Bounding Surfs 选择封闭一个体的表面 Drag along vector将一个截面按照指定的矢量方向进行拉伸 Drag along normal将一个截面沿着正法线方向进行拉伸 Drag along line 沿一条线进行截面拉伸 Spin 沿一个环路进行截面拉伸
12
• 任何学习都应该是从简单到复杂的循序渐进的过程。 • 要划分复杂的六面体网格要从简单的模型学起:简单的模型更适合学习原理
Copyright © 2013 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved.
Copyright © 2013 Altair Engineering, Inc. Proprietary and Confidential. All rights reserved.
ICEM-CFD-关于六面体网格的划分 (1)

四分之一 Ogrid (L-grid)
四分之一O-grids 可以用来对三角
形划分块
看起来 在一个
方向上是C-grid 在另一个方向 是 L-grid
2012-3-8
ICEMCFD/AI*Environment 5.0
25
创建 O-Grids –环绕块
选择 Around block(s) 创建 O-grid 环绕选定的块 – 用于创建环绕固体对象的网格 – 例子 • 圆柱绕流 • 环绕飞机或汽车体的边界层
ICEM CFD/AI*Environment 5.0
六面体网格划分
六面体网格划分步骤 – 自顶向下/ 由底向上
不依赖几何形状创建块�block�结构 – “自顶向下” 拓扑创建 • 用户将是雕塑家而不是砖瓦匠 • 一步创建高级拓扑结构(O-grid)
O-grid
– “自底向上” 拓扑创建 • 创建块过程将是像砖瓦匠一样逐层创建 – 创建块 – 拉伸面 – 复制拓扑
非结构块
几何
2D 块
2012-3-8
ICEMCFD/AI*Environment 5.0
7
分块过程 – 构建适合几何体的块结构
自顶向下方法
从环绕整个几何 体的一个块开始
分割块 以捕捉几何体形状
删除无用的块 2012-3-8
ICEMCFD/AI*Environment 5.0
注意: 缺省情 况下�删除的 块将放入 part VORFN, 在后 面必要时候可 以重新使用
– Volume
体积
– Warpage
扭曲
• 争取 < 45 度
2012-3-8
通过设置直方图�你可以显示指定质量范围 内的网格单元
Fluent-ICEM六面体以及块网格划分原理及介绍详解
9/9/05
ANSYS ICEMCFD V10
Inventory #002277
D1-26
3D Pipe Junction 指南
Finish 3D Pipe Workshop, Capture the Rod and Add O-Block
9/9/05
ANSYS ICEMCFD V10
Inventory #002277
9/9/05
ANSYS ICEMCFD V10
Inventory #002277
D1-13
边参数
Spacing 2 = 1.0
Side 2
Ratio 2 = 1.5
Ratio 1 = 1.5
17 划分法 则
箭头指明 side 1 和 side 2
Side 1
Spacing 1 = 1.0
Side 1 箭头底部
Inventory #002277
D1-20
创建O-Grids – 缺省 O-Grid
为 O-grid选择块
– 可以通过visible(可视), all(全部), part, around face(环绕面), around edge(环绕边), around vertex(环绕点), 2 corner method(对角点)选择
O-grid C-grid L-grid
– 当块必须位于曲线或曲面上时减少歪斜
没有 O-grid
O-grid
9/9/05
ANSYS ICEMCFD V10
Inventory #002277
D1-19
绕体O-网格
解决环绕固体区域的边界层问题而不必增加网格点数目
在对象外围创建O-grid
9/9/05
六面体网格细化过渡问题之我的方案

一般在结构分析中,四边形和六面体是最理想的网格形态,三角形和四面体的数量越少越好。
局部细化本身是非常简单的工作,在HM 里,用SPLIT按键可以一下子实现,但过渡区网格的衔接多数时都需要手动操作了。
四边形网格经过局部细化后,过渡不是很大问题,如图所示,一样都是切一刀,我个人比较倾向于第二种方法来纯四边形过渡。
之所以提到四边形过渡这样基础问题,是因为接下来六面体细化过渡区也要用类似的思路。
六面体就一下子变得麻烦多了,太复杂的网格操作起来非常麻烦,个人推荐如果计算资源不是十分有限的话,还是全局细化吧;以下教程适用于时间充裕并且有必须局部细化需要的人。
再说说六面体的过渡,对于节点不规则的两个体进行衔接,最理想的就是四面体网格了,但问题在于,如果要用四面体来与六面体对接,那势必会用到金字塔单元,或者引入接触对。
都会对一些计算造成影响。
纯六面体的过渡就需要上面的思路,由于比面网格多了一个维度,过度单元需要两排没细化过的单元的空间。
很好理解的,就是先解决XY平面内的过渡问题,再解决YZ平面内的过渡问题。
我只是提供一个思路,所以就用最简单的几何来演示,现实中,操作肯定比这个要复杂百倍~ 个人强烈推荐,所做过的模型,都保留一个HM文件,把几何体分割的内容都留下来,由于HM并没有太有效的绕开四边形网格直接生成六面体网格的方法,所以做细化时需要重新生成单元。
(图中适当的隐藏了某些单元,为了给更好的视角)1)选中需要细化的单元,用3d->split命令细化网格。
2)选中两排单元做为过渡区,用tool->faces命令进行抽面操作,并适当去留一些面单元。
3)删去中间两排体单元,留下面网格并对其按照四边形网格过渡的思路进行切割。
*在现实中,这里可能会需要对体几何重新分割。
4)在面网格的基础上,生成一排体网格,核心思路是这些体网格的一面与小网格完全对应,另一面的两个边,一个边对应小网格的尺寸,另一个边对应大网格的尺寸。
ICEM六面体网格划分解读
ICEM CFD/AI*Environment V10
六面体网格划分
六面体网格划分步骤 – 自顶 向下/ 由底向上
不依赖几何形状创建块(block)结构 – “自顶向下” 拓扑创建
• 用户将是雕塑家而不是砖瓦匠 • 一步创建高级拓扑结构(O-grid)
O-grid
– “自底向上” 拓扑创建
D1-12
颜色表明了关联类型及顶点可以进行的移动方式(边也遵循这一标准, 不包括红色) – 红
Moving Vertices of Different Associations
• 约束到几何点(point)
• 除非改变关联,否则不可移动 – 绿 • 约束到曲线(curve) • 在特定的曲线上滑动 – 白 • 约束到曲面(surfaces) • 在任何 ACTIVE曲面上滑动 (在模型树中打开显示的曲面) • 如果不在曲面上, 将跳到最近的ACTIVE曲面上移动 – 蓝 • 自由(通常是内部)顶点 • 选择顶点附近的边,并在其上移动
– 用于创建环绕固体对象的网格 – 例子 • 圆柱绕流 • 环绕飞机或汽车体的边界层
9/9/05
Inventory #002277 D1-25
比例缩放 O-Grids
– 选定的边赋予的factor为1
在创建过程中或创建后,O-grids 可以改变尺寸 – 缺省情况下O-grid尺寸设置为使网格扭曲最小 – 实际上,通过设定选择的边,你可以缩放所有平行 的O-grid边
D1-21
创建O-Grids – 缺省 O-Grid
为 O-grid选择块
– 可以通过visible(可视), all(全部), part, around face (环绕面), around edge(环绕边), around vertex(环 绕点), 2 corner method(对角点)选择
Hypermesh六面体3D网格划分概述-hexameshing
注意事项: 1、尽可能减少分割的数量 2、起始面与目标面:起始面可以有多个,目标面只能为一个 3、路径中的边界与硬点
4、倒角的处理 如有需要,先劈分倒角面,再压缩边(如下图)
5、通过面网格来控制实体网格 先在起始面画网格,然后再volume
6、划分时,要先划分与已有的相邻几何
请您及时更换请请请您正在使用的模版将于2周后被下线请您及时更换
Hypermesh六面体 3D网格划分概述 -hexameshing一、实体几何二、常见的六 Nhomakorabea体划分方法
1、drag-拉伸 2、spin-旋转 3、line drag-沿线拉伸 4、element offset-单元偏移 5、linear solid-线性近似 6、solid map-映射 注意事项:
四 、 其 他 几 何 、 网 格 编 辑 操 作 ( 在 Tool主 菜 单 页 中 )
参考文献:
1、HyperMesh10.0基础培训教程 2、hypermesh_training中文版自学必备
Hypermesh圆柱、圆管相贯六面体单元网格划分1

Hypermesh圆柱、圆管相贯六面体单元网格划分1
圆管相贯的做法:重点是运用3D---Solid Map生成六面体一、等径两圆管相贯
1:几何模型2:分割模型
3:取出1/4几何模型,并在相交处做面、网格4:运用3D---Solid Map,在其中一
个圆管上生成6面体solid单
元
5、再次运用3D---Solid Map,在另一个圆管上生成
6、运用line drag (其他还有很多方法)
6面体solid单元
二、不等径的两圆管相贯
几何模型1/4模型
方法1:运用solid layers功能
运用3D----elem offset---solid layers
运用方法1生成两圆管相交处的六面体单元质量不是太好。
方法2:运用solid Map功能
1、先在大径圆管外表面作shell单元
2、运用Solid Map,生成6面体单元
3、依所生成的六面体单元,运用Tool---faces生成
4、选中两圆管相交处的shell单元,
Shell单元以此作为Solid Map的基本单元。
5、运用solid Map,生成六面体单元
6、1/4模型所生成的六面体单元
方法1与方法2两圆管相交处的六面体单元对比:
方法1:方法2:
此处单元质量:warpage最大值为33.13 此处单元质量:warpage最大值为7.25。
Hypermesh六面体网格
实例解析
• 删除面网格后,得到最终的网格模型,并检acket.hm,本节将基于体进行六面体网格的划分。基于体进行 六面体网格划分,需要先进行体的分割,然后使用solid map/one volume命令进行划分,同时需要布置面网格。
底板
弯臂
过渡臂
末梢
实例解析
• 使用solid edit命令进行体的分割,如图。
实例解析
• 删除面网格,并查找是否有节点需要合并,同时查看网格质量等,如 果有不合格网格,则可以进行局部调整。之后网格划分结束。
hypermesh六面体网格solidmap命令hypermesh六面体网格solidmap命令hypermesh六面体网格elemsoffset命令实例解析armbrackethm本节将基于面进行六面体网格的划分实例解析底板的网格划分首先布置底板网格然后拉伸生成底板体网格实例解析弯臂的网格划分同底板体网格一样使用solidmapgeneral生成弯臂体网格实例解析过渡臂的网格划分实例解析末梢的网格划分一实例解析末梢的网格划分二实例解析查找并合并重复节点实例解析删除面网格后得到最终的网格模型并检查网格质量实例解析armbrackethm本节将基于体进行六面体网格的划分
实例解析
• 分割完成之后,使用Mappable查看体的显示方式,如图,可以完全 使用one volume划分网格。
实例解析
• 此时可以开始网格划分。首先划分底板体网格。先布置底板的面网格。
实例解析
• 生成弯臂网格
实例解析
• 生成过渡臂网格
实例解析
• 布置面网格,生成部分末梢网格
实例解析
• 再次布置面网格,生成剩余末梢网格
Hypermesh网格划分教程
六面体网格划分
19复杂汽车饰件结构体网格生成方法--施原
复杂汽车饰件结构体网格生成方法施原延锋伟世通汽车饰件系统有限公司复杂汽车饰件结构体网格生成方法Solid mesh generation method for complexautomotive trim施原(延锋伟世通汽车饰件系统有限公司技术中心CAE科)摘要: 基于HyperMesh软件的体网格生成工具和工程实例,介绍了针对复杂汽车饰件模型六面体或五面体网格生成的策略和方法。
关键词:体网格有限元模型汽车饰件前处理Abstract:Base on the solid mesh generation tools of HyperMesh, strategy and method of hexahedron and pentahedron solid mesh generation for complex automotive trim structure is introduced through an actual example.Key words:solid mesh,finite element model,automotive trim,preprocessing1 概述随着计算机技术的发展和有限元分析算法的日益成熟,有限元分析技术在现代汽车开发中已显示出其越来越重要的地位。
有限元分析技术的基本流程是:前处理,分析计算和结果后处理。
其中前处理往往要占用整个过程的大部分时间。
另外,一个合理而且有效的有限元模型对于分析进度和结果往往起到决定性的作用。
为了获得更加准确的计算结果,许多复杂结构的分析要采用体网格。
本文基于HyperMesh的有限元前处理功能结合工程实例,针对复杂的汽车饰件结构生成六面体或五面体网格的方法,进行了一些分析和总结。
2 HyperMesh中六面体或五面体网格的生成方法HyperMesh软件中主要提供了拉伸(Drag)、旋转(Spin)、沿线拉伸(Line Drag)、单元偏移(Element Offset)、线性近似(Linear Solid)和映射(Solid Map)等六面体和五面体网格的生成工具。
Hypermesh系列之——六面体划分(经典案例)

29
17
第二次拉伸螺栓
18
创建螺栓头部外径
19
划分螺栓头部面网格
20
找螺栓表面
21
Elem Offset螺栓头部网格
注意方向!
22
镜像网格
23
融合节点——隐藏螺栓
24
融合节点——螺栓
沿端面拉伸简易轴
可分两次拉伸!
26
融合节点——轴
27
大功告成
28
导出模型
可以单个零件一个个导出,在ABAQUS里面组装!
湖南大学先进动力总成技术研究中心
基于HYPERMESH+ABAQUS 的轴承座分析
湖南大学先进动力总成技术研究中心
轴承壁强度分析——模型
2
网格构思
分两次向上拉伸 盲孔
对称面
轴向拉伸
向下拉伸
通孔
3
剖分几何——利用平面剖分
4
划分结合面网格
上下轴承用同一面网格,可用Spline构建面网格
5
第一次拉伸上轴承座
6
补上螺纹孔网格
7
融合节点
8
拉伸顶部
9
划分端面网格
注意节点重合!
10
轴向拉伸端面网格构成其余部分
注意节点重合!
11
圆周节点投影至光孔内表面
12
拉伸下轴承座第一部分
13
划分下轴承座端面网格
注意节点重合! 注意上下轴承座内圈节点数一致!
14
轴向拉伸端面网格
15
拉伸螺栓——分两次
16
找螺栓表面
HYPERMESH六面体网格划分小教程

Arm001教程第一步:打开文件 asm001.hm第二步:对几何实体进行切割分块操作。
1 进入Geom>Solid edit 面板,选择trim with plane/surf子面板2 激活with plane下的solids黄色按钮,选择图形区中整个实体。
3 激活下面的绿色N1按钮,并如图依次选择N1、N2、N3、B这四个点4 点击trim,将实体切割成为上下对称的两个体。
5 激活with plane下的solids黄色按钮,选择切割好的上半部分实体。
6 激活线面的N1绿色按钮,如图依次选择N1、N2、N3这三个点。
7 点击trim,将这上半部分实体切割成左右对称的两个实体。
第三步:删除多余实体和临时节点1 点击F2快接键,进入Delete面板。
2 激活黄色的solids按钮,并勾选delete bounding surfs。
在图形区中选择下半部分实体和上边的左半部分实体。
3 点击delete entity,删除掉多余的实体。
4 进入Geom>temp node面板,点击绿色的clear all按钮,删除掉多余的临时节点。
第四步:继续对要划分网格的实体进行切割操作1 进入Solid edit 面板,选择trim with plane/surf子面板2 激活with plane下的solids黄色按钮,选择图形区中整个实体。
3 激活下面的N1绿色按钮,并如图依次选择N1、N2、N3这三个点4 点击trim按钮,将最前面一小块实体分割出来。
5 重复此切割操作,按图所示,选择切割平面上的N1、N2 、N3点,把几何体切割成最终可以顺利划分网格的形式。
第五步:进行几何清理,使每一块实体都成为可映射形式。
1 选择几何的显示模式,以Mappable(是否可映射)显示。
2 点击F11快捷键,进入几何编辑面板。
3 激活toggle edge后面的黄色按钮,然后鼠标左击图中的曲线。
这一块实体便成为了可映射的形式。
ansys,hypermesh中常见几何体如何划分六面体

一直想发一个关于六面体网格划分的帖子,因为其确实是有限元前处理中最核心的部分之一,最近也确实研究了一下。
而且本人也有一些看法,呵呵。
不吐不快啊。
其实在AWB里面,很多实体模型即使不对模型进行处理(分割,去掉一些不重要的圆弧、倒角等操作),就可以把网格划分的很好,这里说的网格主要是指六面体网格。
但是,我觉得还是不够理想,譬如说很难去保证一些不是很规则(这里说的是不具备划六面体网格的一些特征实体,但是还是具有一些特征,比如说旋转特征,拉伸,对称等等)模型的网格的一种对称性。
所以为了让具有此类特征的实体模型的网格也具有这些特性,所以对其实体模型还是进行了分割,对模型分割即可以在AWB或ANSYS经典里面进行,也可以在诸如SOLIDWORKS,PRO/E,UG或CATIA 里面进行,然后通过固有的接口或转化成IGS或PARASOLID格式导入到AWB或经典里面进行网格划分。
这里说的对模型的分割,学了ICEM的人应该知道,有些像ICEM里面的创建BLOCK,及后面的创建高级拓扑结构(o-grid)。
对于拿到一个实体模型,怎么来考虑对其进行分割呢?主要有下面几点(围绕着让分割后的一块块的局部模型能够完全的且能受控的划成六面体网格这一思路来进行):1、拿到一个实体模型,也不要盲目的对其进行分割操作,先要看看模型还有没有需要进行修改或简化的地方,前提条件是不要增强结构特性,譬如说一些不影响计算结果的圆角、倒角或小孔,还有,如果这个模型修改某个局部(这里特别要说明,在不改变结构特性或者有很小改变的情况下才可以这样操作)就可以让模型具有一些前面提到的特征。
2、然后再对模型有个全局的把握,比如可以怎么样分割才能最简单,且效果最好。
分割后的每一部分应具有原模型的一些特征,比如由拉伸而成的实体,就沿拉伸轴向对其进行分割,旋转而成的模型,就沿法向或径向对其进行分割等等。
3、划分后的模型如果具有诸如旋转或对称性特征的话,就可以只保留其中的一个,其它的删除掉,然后对保留的一部分划分网格后再进行进行镜像或旋转就可以恢复到原来的模型。
HyperMesh快速划分六面体网格
HyperMesh快速划分六面体网格
快速划分六面体网格
——by forve
在网上看到很多人用Patran对圆柱体的六面体单元划分不得要领,在此想通过一个例子来说明我是怎样做的,希望能够抛砖引玉。
很多人是生成solid来进行六面体网格的自动划分,但这样会有很多的限制。
一是要保证该solid为五面体或六面体;二是该solid必须triparamatic体;三是从其他模型中导入的复杂的solid几何体必须要打断转换为符合前两条的solid体才可以自动划分,而且经常会出现不能break的错误。
鉴于此,我认为使用其它网格划分方法更优,我主要使用了网格划分中的sweep功能来生成六面体单元。
下面就是我做的一个小例子,大概费时不到10分钟。
步骤:
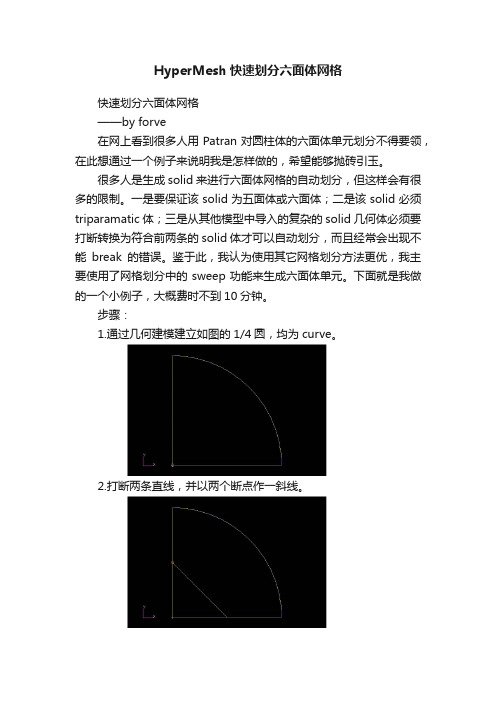
1.通过几何建模建立如图的1/4圆,均为curve。
2.打断两条直线,并以两个断点作一斜线。
3.在圆弧线和斜线上布种子点,均为10个种子点。
4.进行网格划分,使用creat—mesh—2curves,选择圆弧线和斜线。
5.使用sweep—element—extrude,以斜边处的四面体网格自由边为base entity。
扫描方向
为垂直于斜边,通过direction vector来设置。
6.将所选的四面体单元进行变换,使用transform—element—rotate,以坐标轴Z轴为中心
旋转90度,重复次数设为3。
7.用equivalence将多余的重复节点去掉。
8.扫描成六面体。
使用sweep—element—extrude,以四面体单元为base entity。
扫描方向
为坐标轴Z方向。
HyperMesh六面体及复杂壳结构网格划分解决方案

HyperMesh六面体及复杂壳结构网格划分解决方案
主题:HyperMesh六面体及复杂壳结构网格划分解决方案
时间: 2013-2-28 9:30 AM - 11:30 AM
HyperMesh是一款强大的网格划分软件,用户既可以进行自动化的几何清理和网格划分也可以在任意步骤进行人工干预。
六面体网格和复杂壳结构网格划分是常见的比较复杂的问题,用户通常需要为此花费较长的时间和较多的劳动。
本次讲座的目标是是使用户对HyperMesh在六面体及复杂壳结构网格划分方面的功能有一个较为全面的认识。
本次讲座我们将介绍HyperMesh在六面体网格划分和复杂壳单元建模方面的主要功能,
包括:
第一部分:六面体网格划分
⌝几何体的建模、编辑、布尔运算等功能
⌝HyperMesh在六面体网格划分方面的主要面板
⌝六面体网格划分过程中的分块策略
⌝HyperMesh六面体网格划分的一般流程
⌝HyperMesh六面体网格划分实例演示
第二部分:复杂壳结构网格划分
⌝曲面几何清理功能介绍
⌝曲面编辑
⌝中面抽取与编辑功能介绍
⌝ 2D网格编辑
⌝复杂壳结构网格划分的主要难点
⌝复杂壳结构网格划分实例演示。
[新版]hm六面体网格思路
![[新版]hm六面体网格思路](https://img.taocdn.com/s3/m/b768ebdb0d22590102020740be1e650e52eacfd1.png)
Hypermesh中六面体网格划分的基本方法:一、各面板功能介绍1、drag面板此面板的功能是在二维网格接触上沿着一个线性路径挤压拉伸而形成三维实体单元。
要求:1)有初始的二维网格;2)截面保持不变:相同尺寸,相同曲率和空间中的相同方向;3)线性路径。
2、spin面板此面板的功能是在二维网格基础上沿着一个旋转轴旋转一定角度形成三维实体单元。
要求:1)有初始的二维网格;2)界面保持不变;3)圆形路径;4)不能使用在没有中心孔的实体部件上。
3、line drag面板此面板的功能上在二维网格的基础上沿着一条线拉伸成三维实体单元。
要求:1)初始的二维网格;2)截面保持不变;3)有一条定义的曲线或直线路径。
4、element offset面板此面板的功能是在二维网格的基础上沿着法线方向偏置挤压形成三维实体单元。
要求:1)初始的二维网格;2)截面可以是非平面的;3)常厚度或者近似常厚度。
5、linear solid面板此面板的功能是二组“相似的”各壳体单元之间以线性路径形成三维实体单元。
相似的网格有如下要求:1)相同的单元数;2)单元具有同样的构造;3)网格有相同的模式;4)四边形单元只能与四边形单元连接、三角形单元只能与三角形单元连接,但可以有不同的单元尺寸和/或曲率。
6、solid mesh面板此面板的功能是在由线组成的实体上形成三维实体单元。
要求:1)由线粗略定义的立方形实体;2)确定别映射的密度和六面体单元。
7、soild map面板此面板的功能是在二维网格基础上,首先挤压网格,然后将挤压的网格映射到一个由几何要素定义的实体中,从而形成三维实体单元。
二、网格划分的技巧和策略实体网格划分从三个方面入手:几何模型、划分方法和解决策略。
1、几何模型1)了解部件的形状,主要集中在尺寸小的部分。
2)什么样的特征可以被忽略,例如小的倒角和圆孔。
3)何种特征对分析是关键的特征,这些特征对确保好的单元质量是需要的。
HM_3D_Mesh Ability

Creation of cylinder block model with offset cylinder
A cylinder liner center moves.
12mm
Crankshaft modify
Block modify
Journal Diameter Modify Pin Diameter Modify Journal Diameter Modify
六面体网格建模方法
Drag 拉伸 Spin 旋转 Line Drag 沿线拉伸 Element Offset 单元偏移 Linear Solid ?
Solid Map 映射
Solids Panels
Drag 拉伸
• • • Requires initial 2D mesh for pattern Constant Cross-section • same size, same curvature, same orientation in space Linear Path
~700,000 elements
六面体网格
Introduction
• Solid meshing in HyperMesh is powerful!!! • solids are generally “extruded” from 2d mesh • this allows a great deal of control over the mesh
Solids Panels - Drag
Solids Panels
Spin 旋转
• • • • Requires initial 2D mesh for pattern Constant Cross-section Circular path Don’t use on a solid part that has no central hole
Hypermesh六面体划分-史上最经典案例
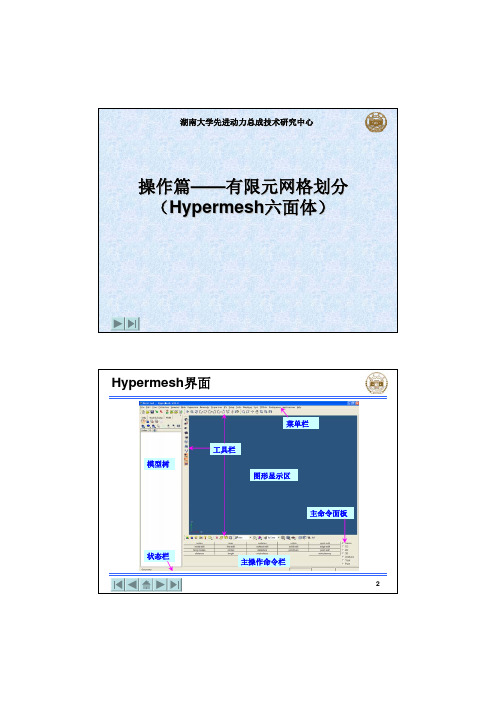
工具栏模型树
状态栏
主操作命令栏
主命令面板菜单栏
图形显示区
旋转——spin
或者沿线拉伸——line drag
——elem offset 或者沿线拉伸——line drag
linear solid Solid Map
4
输入名字
或者F12
6
或者F4
按下鼠标左键,放
至弧线直至变亮
选择三点
圆心
7
按住“Shift”键,用左键框
选(右键去掉多余的选择)
注意旋转方向
按“V”键进入视图管理
8
沿此线拉伸
与另一端对应
左键增加,右键减少
10
11
直接选择相应的collector ,或者选择元素
自动创建一个“^faces ”的collector
可通过“by face”选择
节点要对应
选择之后,先复制
14
依次选择点
单独显示体网格
或者“Shift”+F3可按“D”键进入
display面板
调整容差,但最好不要
超过网格尺寸的20%
构思……构思&构思很重要,只要一路下
去节点能重合,基本上说明构思成功!。
hypermesh柔性体(MNF)教程

第一步:导入:第二步:材料属性(注意红圈之的单位属性,可根据实际情况修改,此处不做修改)第三步:网格(这里为实体网格,可以为四面体,也可以为6面体)第四步:提取面网格(命令:tool-faces)在components里面会有名字为faces的component,点击collector命令,选择update,选择faces(可以改变名称,这里后面的名称位skin)的component,点击update/edit第五步;设置此component属性注意上图中红圈的标记,要选择的第六步:创建刚性区域这里有两个刚性区域,具体创建步骤不再详述第七步:创建load collectors创建名字为aset的load collectors,此load collector为约束,在创建约束的时候使用no card;创建名字为cms的load collectors,此load collector定义模态,card=cmsmeth,然后点击create/edit,出现以下面板,进行编辑第八步;创建约束在global面板下将loadcol选择位ASET点击return进入analysis面板,选择constraints命令,选择刚性区域中心的两个节点,6个自由度根据需要来选择或者取消点击create第九步:设置entity set在analysis面板下点击entity set,name=skin,entity设置为comps,并选择skin(faces)点击create,创建entity set第十步:设置load types在analysis面板下选择load types,进入load types面板,将constraint=设置为ASET第十一步:创建载荷步在analysis面板下选择subcase命令,按照下图设置载荷步CMSMETH选择前面创建的CMS第十二步:设置控制卡片在analysis面板下选择control card命令,进入控制卡片设置面板点击DISPLACEMENTS-RETURN设置结果的位移输出;点击DTI_UNITS设置单位点击next选择STRAIN命令,进入如下面板将STRAIN_OPT设置为PSID,双击PSID选择SKIN 以同样的方法设置STRESS控制卡如果需要其他的设置,可自行选择。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Hypermesh中六面体网格划分的基本方法:
一、各面板功能介绍
1、drag面板
此面板的功能是在二维网格接触上沿着一个线性路径挤压拉伸而形成三维实体单元。
要求:
1)有初始的二维网格;
2)截面保持不变:相同尺寸,相同曲率和空间中的相同方向;
3)线性路径。
2、spin面板
此面板的功能是在二维网格基础上沿着一个旋转轴旋转一定角度形成三维实体单元。
要求:
1)有初始的二维网格;
2)界面保持不变;
3)圆形路径;
4)不能使用在没有中心孔的实体部件上。
3、line drag面板
此面板的功能上在二维网格的基础上沿着一条线拉伸成三维实体单元。
要求:
1)初始的二维网格;
2)截面保持不变;
3)有一条定义的曲线或直线路径。
4、element offset面板
此面板的功能是在二维网格的基础上沿着法线方向偏置挤压形成三维实体单元。
要求:
1)初始的二维网格;
2)截面可以是非平面的;
3)常厚度或者近似常厚度。
5、linear solid面板
此面板的功能是二组“相似的”各壳体单元之间以线性路径形成三维实体单元。
相似的网格有如下要求:
1)相同的单元数;
2)单元具有同样的构造;
3)网格有相同的模式;
4)四边形单元只能与四边形单元连接、三角形单元只能与三角形单元连接,但可以有不同的单元尺寸和/或曲率。
6、solid mesh面板
此面板的功能是在由线组成的实体上形成三维实体单元。
要求:
1)由线粗略定义的立方形实体;
2)确定别映射的密度和六面体单元。
7、soild map面板
此面板的功能是在二维网格基础上,首先挤压网格,然后将挤压的网格映射到一个由几何要素定义的实体中,从而形成三维实体单元。
二、网格划分的技巧和策略
实体网格划分从三个方面入手:几何模型、划分方法和解决策略。
1、几何模型
1)了解部件的形状,主要集中在尺寸小的部分。
2)什么样的特征可以被忽略,例如小的倒角和圆孔。
3)何种特征对分析是关键的特征,这些特征对确保好的单元质量是需要的。
2、划分方法
1)把部件分割成不同的区域
2)每个区域必须有可能只是用一种三维网格模式。
3)寻找下述特点区域:大量升成区域,对称性区域,产生困难的区域。
4)寻找大量不同区域和方法。
5)注意什么样的二维网格模式被要求。
6)观察周围区域,什么功能可以在那里使用。
7)二维网格模式是否可以延伸到相邻区域中。
8)寻找对网格模式不能处理位置进行网格划分的方法:如果这样做了,寻找网格可以触及的曲面;注意周围网格将于此模式想融合。
9)小特征融入到大特征中,大特征划分网格时必须考虑到小特征。
3、解决策略
1)内部特征衔接外部特征:
a 不能变成被限制的。
b 网格模式需要一个面流入以便它们可以停止。
C 从内到外分网可以避免此问题。
2)小特征融入大特征中。
3)硬特征应当先处理。
4)通常情况下首先进行大量的生成,后面的编辑是比较容易的,可以按此方式进行。