三角网最弱边的精度估算
测绘工程试题

大地测量学基础思考题集1、解释大地测量学,现代大地测量学由哪几部分组成?谈谈其基本任务和作用?2、大地测量学的发展经历了哪些阶段,简述各阶段的主要贡献和特点。
3、大地测量学如何控制地形测图的,大地测量未来发展方向如何?4、简述物理大地测量的主要任务和内容?5、解释重力、引力、离心力、引力位、离心力位、重力位、地球重力场、正常重力、正常重力位、扰动位等概念,简述其相互关系。
6、简述引力、离心力方向及其决定因素如何?地球引力位公式一般有可以哪几种方式表达?7、如何理解引力位几何意义及其物理学意义?8、引力位、离心力位、重力位是否调和函数,为什么?9、研究重力位有何意义?为何要研究正常重力位?10、解释大地水准面、大地体、总椭球、参考椭球、大地天文学、拉普拉斯点、黄道面、春分点11、重力扁率同椭球扁率之间的关系如何?(克莱罗定理)12、地球大地基准常数有哪些?简述地球重力场与大地测量学的关系?13、分析地球不同高度处的正常重力有何不同?14、解释水准面的含义及性质,为什么说水准面有多个?15、解释大地水准面含义及性质,为什么各国的大地水准面实际上不一致?16、解释似大地水准面含义及性质,简述水准面、大地水准面、似大地水准面的异同点。
17、解释总椭球、参考椭球及正常椭球的含义、性质和作用,分析它们异同点。
28、简述我国的高程基准面、原点高程及确定方法。
19、简述大地测量常用坐标系的定义、建立及相互关系。
20、简述地球椭球基本参数、相互关系及经验结论,绘图说明地球椭球辅助函数W、V的几何意义。
21、什么是椭球中心三角形,其边长大小如何?22、为什么说椭球面上的点(两极及赤道除外)的法线一般不通过椭球中心?23、简述大地纬度、地心纬度、归化纬度的概念,其相互关系如何?24、解释垂线偏差,造成地面各点垂线偏差不等的原因有哪些?,简述研究垂线偏差有何意义?25、何为拉普拉斯方程,简述大地坐标系与天文坐标系的关系。
广东省2016年下半年工程测量员初级理论知识考试题

广东省2016年下半年工程测量员初级理论知识考试题一、单项选择题(共25 题,每题 2 分,每题的备选项中,只有 1 个事最符合题意)1、在全圆测回法的观测中,同一盘位起始方向的两次读数之差称__。
A.归零差B.测回差C.互差D.指标差2、水准尺向前或向后方向倾斜对水准测量读数造成的误差为__。
A.偶然误差B.系统误差C.可能是偶然误差,也可能是系统误差D.既不是偶然误差,也不是系统误差3、导线测量的外业工作包括()。
A.踏勘选点B.测角C.建立标志D.连测E.记录4、望远镜视准轴指__。
A.物镜光心与目镜光心的连线B.物镜光心与十字丝交点的连线C.目镜光心与十字丝交点的连线D.物镜光心、目镜光心与十字丝交点的连线5、钢尺是量距的首要工具,又称钢卷尺,一般宽__、厚__。
A.0.6~1.5cm;0.2~0.5mmB.0.8~1.2cm;0.2~0.5mmC.0.8~1.4cm;0.3~0.6mmD.0.8~1.5cm;0.3~0.5mm6、关于现金流量表中现金流入的资金回收部分,下列说法中正确的是__。
A.固定资产余值回收额为固定资产折旧费估算表中最后一年的期末固定资产净值B.流动资金回收额为流动资金投资估算表中最后一年的期末净值C.固定资产余值回收和流动资金回收均在计算期最后一年D.固定资产余值回收额是正常生产年份固定资产的占用额E.流动资金回收额为项目正常生产年份流动资金的占用额7、在三角网的精度估算中,最佳推算路线是指__。
A.所经过的三角形最多的推算路线B.所经过的三角形最少的推算路线C.所有的推算路线中边长权倒数最小的路线D.所有的推算路线中边长权倒数最大的路线8、测量竖直角时,采用盘左、盘右观测,其目的之一是可以消除__误差的影响。
A.对中B.视准轴不垂直于横轴C.指标差D.整平9、通常取__倍或2倍中误差作为极限误差。
A.1B.3C.4D.610、测设点平面位置的方法,主要有直角坐标法、极坐标法、__和距离交会法。
三角网布设及概算

传统技术条件下,三角测量是布设平面控 制网的最主要形式 三角测量的技术要求,是根据多年来对已 有控制网的技术统计和综合分析,兼顾 到一些主管部门今年来实施的有关规定 而做出的 它既总结了前人的经验,又考虑到目前的 现状
三角测量的主要技术要求
三角测量的主要技术要求 1、基本精度
1、图解法 当偏心距e小于0.3~0.5m时,采用图解法 (1)在标石上方案置小平板 (2)在离站标高1.5倍处选3点,I、II、III、分别安置 仪器 (3)投影3个中心 (4)取盘左、盘右两对点的中心连成一条投影线 (5)形成示误三角形 (6)量取eY和θ Y
归心元素的测定方法
2、直接法 (1)量取eY、用钢尺 (2)用仪器观测θ Y
Ti To 1 2 i i 180
dTi用观测角的微分dβ i表示,则
y1dT1 y1 (dTo d1 )
y2 dT2 y2 (dTo d1 d 2 )
单一导线误差理论
yn dTn yn (dTo d1 d 2 d n )
对于等精度观测,令其中误差为mβ
M Tn m n
n为转角个数,导线边方位角中误差与成正比, 应限制转折角个数
单一导线误差理论
2、支导线终点位置误差
如上图建立坐标系,终点坐标公式为:
x n 1 Di cosT
n i 1
n y n 1 [ Di sin Ti ]1
单一导线误差理论
三角测量概算
三、观测成果的质量检核
1、三角形闭合差 2、测角中误差 3、极条件闭合差 4、基线条件闭合差 5、坐标方位角条件闭合差
单一导线误差理论
控制测量技术要求
控制测量技术要求控制测量技术要求本作业指导书是针对施工控制测量的特点和作业需要编写的,服务范围是二等以下施工平面控制网、平高控制网、高程控制网的建立和控制点加密。
使用本指导书进行测量作业,应遵守《国家三角测量规范》、《国家一、二等水准测量规范》、《国家三、四等水准测量规范》、《水利水电工程施工测量规范》等规程规范。
如业主有特殊要求的,按业主要求执行。
一、准备工作1.收集资料1.1广泛收集测区及其附近已有的控制测量成果和地形图资料。
(1)控制测量资料包括成果表、点之记、展点图、路线图、计算说明和技术总结等。
收集资料时要查明施测年代、作业单位、依据规范、平高系统、施测等级和成果的精度评定。
成果精度指三角网的高程、测角、点位、最弱边、相对点位中误差;水准路线中每公里偶然中误差和水准点的高程中误差等。
(2)收集的地形图资料包括测区范围内及周边地区各种比例尺地形图和专业用图,主要查明地图的比例尺、施测年代、作业单位、依据规范、坐标系统、高程系统和成图质量等。
(3)如果收集到的控制资料的坐标系统、高程系统不一致,则应收集、整理这些不同系统间的换算关系。
1.2收集合同文件、工程设计文件、业主(监理)文件中有关测量专业的技术要求和规定。
1.3准备相应的规范:《国家三角测量规范》、《国家一、二等水准测量规范》、《国家三、四等水准测量规范》、《GPS测量规范》、《水利水电工程施工测量规范》。
1.4了解测区的行政划分、社会治安、交通运输、物资供应、风俗习惯、气象、地质情况。
例如了解冻土深度,用以考虑埋石深度;最大风力,以考虑觇标的结构;雾季、雨季和风季的起止时间,封冻和解冻时间,以确定适宜的作业月份。
2.现场踏勘携带收集到的测区地形图、控制展点图、点之记等资料到现场踏勘。
踏勘主要了解以下内容:2.1原有的三角点、导线点、水准点、GPS点的位置,了解觇标、标石和标志的现状,其造标埋石的质量,以便决定有无利用价值。
2.2原有地形图是否与现有地物、地貌相一致,着重踏勘增加了哪些建筑物,为控制网图上设计做准备。
桥梁首级GPS控制网测量及数据处理

桥梁首级GPS控制网测量及数据处理作者:王煜昭来源:《地球》2013年第12期[摘要]本文结合桥梁工程实例,介绍了桥梁首级GPS控制网的设计方案及控制点埋设方式,较详细论述了桥梁首级GPS控制网测量过程及数据的处理,对测量成果进行了精度分析,给同类工程带来较大的借鉴价值。
[关键词]GPS控制网设计测量数据处理精度分析[中图分类号] P228.4 [文献码] B [文章编号] 1000-405X(2013)-12-124-2桥梁是交通运输中的重要组成部分,在国民经济建设与社会发展中占有极其重要的地位。
而桥梁首级控制网是桥梁工程设计和施工的重要组成部分,其成果的精度和准确度的高低将直接影响到桥梁建设的成败。
如果首级控制网的质量不好将会出现难以收拾的局面,造成无法挽回的重大损失。
因此,桥梁的首级控制网在桥梁建设的全过程中起着至关重要的作用。
本文结合实例,就桥梁首级GPS控制网测量及数据处理进行相关研究。
1首级GPS控制网的设计方案某桥梁工程,主桥长813m,主塔高114m,主桥为双塔单索面钢箱梁斜拉桥。
1.1首级控制网设计思路首级GPS控制网布设方案从初步设计、精度估算,优化设计,均通过严格审查,GPS网的设计思路如下:由于主桥两段控制点距离较短均小于1km,首级GPS控制网的平均基线长度为6km,其中,最长基线长度约为20.4km,最短基线长度为0.6km。
整个首级控制网的平均距离小于B级GPS控制网的平均距离50km。
但考虑大桥施工放样精度要求较高,因此大桥首级GPS控制网的平面测量观测等级按B级观测精度执行。
1.2首级GPS控制网基本精度等级GPS网点位中误差限差取±20mm。
基本精度按相邻点间弦长标准δ衡量。
首级GPS网标准差限差指标为:式中δ为标准差,a为固定误差5;b为比例误差系数,取10-6;d为相邻点间距。
网的最弱边边长相对中误差优于1/120000(参照《城市测量规范》2.1.9中二等三角网的最弱边边长相对中误差技术要求)。
关于工程控制网设计中的精度估算
关于⼯程控制⽹设计中的精度估算关于⼯程控制⽹设计中的精度估算⼯程控制⽹(包括GPS ⽹、⽔准⽹、导线⽹)在地形图上设计好控制⽹形后,需要按照观测等级精度对待定点进⾏精度估算。
⼀、⽔准⽹精度估算1、单⼀⽔准路线(闭合或附合⽔准路线)精度估算参考《应⽤⼤地测量学》第三章第五节有关内容。
对于单⼀闭合或附合⽔准路线,按设计等级⽔准测量每km 全中误差W M 计算待定点最弱点⾼程中误差H M 。
设⽔准路线全长为L (km ),则4L M M W H = (1)对于单⼀⽀⽔准路线,按设计等级每千⽶往返测⾼差偶然中误差△M 计算最弱点(终点)⾼程中误差H M ,设⽀⽔准路线全长为L (km ),则L △M M H = (2)2、⽔准⽹(多结点、多闭合环)精度估算(1)按等权代替法对⽔准⽹进⾏精度估算(参见第三章第五节)如能将复杂的⽔准⽹通过路线合并与路线连接,简化成⼀条虚拟的等权路线,便可按单⼀路线计算最弱点⾼程中误差。
(2)按间接平差原理,构建⾼差的误差⽅程式系数矩阵,组成法⽅程系数矩阵并求逆,得待定点⾼程的权倒数阵Q ,按设计等级⽔准测量每km 全中误差W M 计算待定点⾼程中误差i H Mi i Q M M W H = (3)(3)按带结点的⽔准⽹间接平差⽅法参见《应⽤⼤地测量学》第⼋章第四节有关内容:⾼差观测值的权(Pi=1/Li )确定后,直接构建法⽅程系数矩阵。
法⽅程系数矩阵的对⾓线元素是该结点周围各⽔准路线⾼差观测之的权之和,⾮对⾓线元素是两个结点间⾼差观测值得权的相反数。
法⽅程系数矩阵求逆,得结点⾼程的权倒数阵Q 。
按设计等级⽔准测量每km 全中误差W M 计算待定点⾼程中误差。
每两个结点之间的单个⽔准路线按1、所述⽅法进⾏最弱点⾼程精度估算。
计算例:按上述三种⽅法估算⽔准⽹待定点⾼程中误差如图所⽰,A 、B 为已知⼆等⾼级⽔准点,1、2、3为待定四等⽔准点,各测段路线长A BLi 由图上量取并标⽰于图上。
水运工程测量规范标准

修订说明本规是在《水运工程测量规》(JTJ203—94)的基础上,吸收近年来不断发展的测量新技术,充分考虑测量新设备和新方法的发展,并参考国外的相关标准修订而成。
本规主要包括平面控制测量、高程控制测量、地形测量、水位控制测量、水深测量、施工测量、水文观测、变形测量和制图等技术容。
本规主编单位为航道局,参加单位为第一航务工程勘察设汁院、海事局、航道局、长江航道局、中港第三务工程局和水运工程科学研究所。
《水运工程测量规》(JTJ 203—94)颁布实施7年来,为水运工程的测量技术发展和工程建设都起到了重要的作用,但由于测量的新技术和新设备发展很快,测量方法也随之不断的改进,该规中的部分容已不能适应目前水运工程测量的要求。
为此,交通部水运司组织航道局等单位对原规进行了全面修订。
本次修订中主要增加和补充了GPS测量、RTK-DGPS测量、数字化测图、施工定位、机助制图、多波束测深和适航水深测量等容,并对原规中的部分条文进行了修改和完善。
本规共分11章56节21个附录,并附条文说明。
本规编写人员分工如下:1总则:郭文伟2术语:郭文伟3平面控制测量:铁军、郭文伟4高程控制测量:铁军、素江、袁世中5地形测量:金亮6水位控制测量:袁世中P17水深测量:郭文伟、铁军8施工测量:为荣、郭文伟9水文观测:金亮、万大斌、唐友田10 变形测量:为荣、郭文伟11制图:立新、万大斌附录A:郭文伟附录B、C:铁军附录D:万大斌附录E、F:袁世中附录G~H、附录J~M:郭文伟附录N:铁军附录P~R:郭文伟附录S:万大斌附录T:铁军附录u:万大斌附录V:立新、万大斌附录w:郭文伟本规于2000年12月23日通过部审,2001年9月5日发布,2002年1月1日实施。
本规由交通部水运司管理和解释。
请各有关单位在执行过程中,将发现的问题和意见及时函告交通部水运司和本规管理组,以便再修订时参考。
P2目次1总则 (1)2术语 (2)3平面控制测量 (5)3.1一般规定 (5)3.2导线测量 (6)3.3三角测量和三边测量 (8)3.4电磁波测 (10)3.5 GPS测量 (11)3.6资料整理 (14)4高程控制测量 (19)4.1一般规定 (19)4.2水准测量 (20)4.3三角高程测量 (22)4.4跨水面高程测量 (24)5地形测量………………………………………………………(26)5.1 一般规定 (26)5.2测站补点 (29)5.3细部坐标点的测定 (30)5.4地物和地貌测绘 (30)5.5地形图拼接与检查 (33)6水位控制测量 (34)6.1一般规定 (34)6.2水位站布设 (35)6.3水位观测 (36)6.4平均海面的确定 (39)P16.5深度基准面的确定 (40)7水深测量 (42)7.1一般规定 (42)7.2测深线布设 (43)7.3定位 (44)7.4测深 (47)7.5水下障碍物探测 (49)7.6适航水深测量 (50)7.7业整理 (51)8施工测量 (54)8.1一般规定 (54)8.2施工平面控制 (54)8.3施工高程控制 (56)8.4施工标志 (57)8.5疏浚和航道整治施工放样 (57)8.6港口工程施工放样 (59)8.7吹填施工测量 (62)9水文观测 (63)9.1一般规定 (63)9.2比降观测 (63)9.3沿海流速和流向观测 (64)9.4河流速、流向和流量观测 (65)9.5泥沙测验和底质探测 (67)9.6断面测量 (69)9.7波浪和风观测 (70)9.8海水含盐度测定 (72)9.9冰情观测 (72)9.10航迹观测 (74)10变形测量 (75)10.1一般规定 (75)P210.2监测网的布设 (76)10.3监测网观测 (77)lO.4水平位移观测 (79)lO.5滑坡观测 (79)10.6沉降观测 (80)10.7倾斜和裂缝观测 (81)10.8业整理 (82)11制图 (84)11.1一般规定 (84)11.2编图设计和编绘 (85)11.3清绘和注记 (87)11.4晒蓝图、静电复印和复照 (87)附录A 测量任务书、技术设计书和技术报告提纲 (89)附录B 控制点标石、标石规格及埋设 (94)附录C GPS接收机的检验、比对和GPS观测记录手簿 (97)附录D 跨江线缆垂弧测量 (99)附录E 水位站经历簿格式和测站考证簿的主要容 (102)附录F 理论最低潮面的计算 (108)附录G 定位中误差估算公式 (110)附录H 无线电定位系统的布设和技术要求 (112)附录J 克拉索夫斯基椭球体曲率半径 (114)附录K 测深仪的检验要求 (116)附录L 深度改正数计算 (117)附录M 测深仪换能器动吃水改正数测定方法 (119)附录N 多波束测深系统和侧扫声纳扫测作业要求 (121)附录P 软式扫海具扫测报告格式 (129)附录Q 水位分带方法 (134)附录R 施工标志测设容 (135)附录S 河床质探测器 (137)附录T 浅地层剖面仪使用要求 (139)P3附录U 船舶航行双迹观测 (141)附录V 水运工程测量规图式 (143)附录W 本规用词用语说明 (207)附加说明本规主编单位、参加单位、主要起草人、总校人员和管理组人员 (208)附条文说明 (211)P41总则1.0.1为统一水运工程测量的技术要求,保证测量质量,满足水运工程规划、设计、施工、验收和船舶安全航行的需要,制定本规。
测绘科学技术:控制测量学考点(最新版)_0.doc
测绘科学技术:控制测量学考点(最新版) 考试时间:120分钟 考试总分:100分遵守考场纪律,维护知识尊严,杜绝违纪行为,确保考试结果公正。
1、填空题 支水准路线,既不是附合路线,也不是闭合路线,要求进行( )测量,才能求出高差闭合差。
本题答案: 2、填空题 竖直角为照准目标的视线与该视线所在竖面上的( )之夹角。
本题答案: 3、名词解释 大地线 本题答案: 4、填空题 竖直角就是在同一竖直面内,( )与( )之夹角。
本题答案: 5、名词解释 勒让德尔定理 本题答案: 6、填空题 森林罗盘仪的主要组成部分为( )和( )。
本题答案: 7、问答题 脉动阻尼器有什么作用?主要组成部分有哪些?姓名:________________ 班级:________________ 学号:________________--------------------密----------------------------------封 ----------------------------------------------线----------------------本题答案:8、单项选择题我国采用的高程系是()。
A.正高高程系B.近似正高高程系C.正常高高程系D.动高高程系本题答案:9、填空题椭球定位可分为()和()。
本题答案:10、多项选择题下述哪些误差属于真误差()。
A.三角形闭合差B.多边形闭合差C.量距往、返较差D.闭合导线的角度闭合差E.导线全长相对闭合差本题答案:11、填空题控制测量分为()和()控制。
本题答案:12、填空题一个三角形的三内角的角度改正值之和应等于该三角形的()。
本题答案:13、填空题水准点的符号,采用英文字母()表示。
本题答案:14、多项选择题高程测量按使用的仪器和方法不同分为()。
A水准测量;B闭合路线水准测量;C附合路线水准测量;D三角高程测量E三、四、五等水准测量本题答案:15、名词解释大地l19、多项选择题确定直线的方向,一般用()来表示。
2015年江西省初级工程测量员考试试题

2015年江西省初级工程测量员考试试题一、单项选择题(共25题,每题2分,每题的备选项中,只有 1 个事最符合题意)1、关于图2-2中a、b所表示的内容,下列说法正确的是()。
A.(图表示测量坐标,(图表示施工坐标B.(图表示施工坐标,(图表示测量坐标C.(图表示勘察坐标,(图表示施工坐标D.(图表示施工坐标,(图表示勘察坐标2、测设的基本工作包括__。
A.测设水平角B.测设水平距离C.测设方位角D.测设高程E.测设竖直角3、楼层平面放线记录应标明()。
A.楼层外轮廓线B.楼层重要尺寸C.控制轴线D.指北针方向E.指南针方向4、DJ2级光学经纬仪的构造特点有__。
A.利用手轮可变换读数显微镜中水平盘和竖盘的影像B.当换像手轮端面上的指示线水平时,显示水平盘影像C.DJ2级光学经纬仪和DJ6级光学经纬仪的构造完全相同D.当指示线成竖直时,显示竖盘影像E.能消除读盘偏心差的因素影响5、常用的交会测量方法主要有()。
A.前方交会B.后方交会C.测边交会D.距离交会E.角度交会6、下列选项中,__属于仪器误差。
A.视准轴误差B.横轴误差和竖轴误差C.竖盘指标误差D.度盘偏心差E.目标偏心误差7、下列选项属于底层立面图的读图步骤的是__。
A.了解图名和比例B.了解房屋的形状和外貌C.了解门窗的类型、位置及数量D.了解各部分的标高E.了解定位轴线、内外墙的位置和平面布置8、下列关于公路特点的叙述,正确的有__。
A.公路应按照公路网的规划,从全局出发B.公路应按照公路的使用任务、功能和远景交通量综合确定的公路等级、道路建筑界限、横断面类型、纵断面高程与控制坡度和近、远期交通量大小等进行设计C.公路的中线位置,一般均由城市规划部门按城市测量坐标确定D.公路的平面线型、纵横断面的协调既要满足公路等级的需要,又要适合地形的现状,做到合理、经济E.公路建设必须重视环境保护9、下列关于建筑工程施工测量安全管理的有关叙述,正确的有()。
控制测量学试题
控制测量学试卷(A)一.填空题(20分)1、控制网一般分为:(1)和(2)两大类。
(1)类解决控制点的坐标 ,(2)类解决控制点的高程。
2、导线网由于通视方向少,在布网时受障碍物限制较少,又由于边角同测,其横向位移小于 ,纵向位移小于,又低于测边网和三角网,尤其在城镇地区应用更具优越性。
3、控制测量的作业流程分别为:收集资料、、图上选点、、造标埋石、、计算。
4、设想静止平均海水面向陆地延伸所包含的形体是。
5、四等工程测量三角网中,测角中误差为,三角形闭合差为。
6、在进行水平方向值观测时,2个方向采用测回法观测;当观测方向超过3时用。
7、我国采用的高程系统为高程系统,在直接观测高程中加上改正数ε和改正数λ,就得正常高高程。
8、二等水准测量中,视线离地面最低高度为 m,基辅分划读数较差为。
9、四等水准可以采用“后—后—前—前”的观测程序,而精密水准必须要采用观测程序。
10、以大地水准面为基准面的高程系统称为。
二. 选择题(20分)1、因瓦水准尺的“基辅差”一般为。
A 351050;B 315500;C 301550 ;D 305150 。
2、水准仪i角误差是指水平视线(视准轴)与水准管轴之间。
A 在垂直面上投影的交角;B 在水平面上投影的交角;C 在空间的交角。
3、导线测量中横向误差主要是由引起的。
A 大气折光;B 测距误差;C 测角误差;D 地球曲率。
4、已知椭球面上某点的大地坐标(L,B),求该点在高斯投影面上的直角坐标(x,y),叫做。
A 坐标正算;B 坐标反算;C 高斯正算; D高斯反算。
5、在三角测量中,最弱边是指。
A 边长最短的边;B 边长最长的边;C 相对精度最低的边;D 边长中误差最大的边。
6、经纬仪观测水平角时,采用盘左、盘右取平均可消除的影响。
A 竖直度盘指标差;B 水平度盘中心差;C 水平度盘分划误差;D 照准部旋转引起底部位移误差。
7、DJ2是用来代表光学经纬仪的,其中2是指。
《控制测量》模拟试卷填空简答

控制测量考试模拟试卷一、单项选择题1、因瓦水准尺的“基辅差”一般为( D) 。
A、351050;B、315500;C、301550 ;D、305150 。
2、水准仪i角误差是指水平视线(视准轴)与水准管轴之间( A )。
A、在垂直面上投影的交角;B、在水平面上投影的交角;C、在空间的交角。
3、导线测量中横向误差主要是由( C)引起的。
A、大气折光;B、测距误差;C、测角误差;D、地球曲率。
4、已知椭球面上某点的大地坐标,求该点在高斯投影面上的直角坐标叫做( C)。
A、坐标正算;B、坐标反算;C、高斯正算;D、高斯反算。
5、在三角测量中,最弱边是指( C)。
A、边长最短的边;B、边长最长的边;C、相对精度最低的边;D、边长中误差最大的边。
6、观测水平角时,采用盘左、盘右取平均可消除( C )的影响。
A、竖直度盘指标差;B、水平度盘偏心差;C、水平度盘分划误差;D、照准部旋转引起底部位移误差。
7、DJ2是用来代表光学经纬仪的,其中2是指( C)。
A、我国第二种类型的经纬仪;B、经纬仪的型号;C、该型号仪器水平方向观测一测回的中误差;D、厂家的代码。
8、水准线路设置成偶数站可以消除( B )的影响。
A、i角误差;B、仪器下沉误差;C、标尺零点差;D、大气折光差。
9、水准测量时,一条线路采用往、返测取中数可以消除( C )的影响。
A、i角误差;B、仪器下沉误差;C、标尺零点差;D、标尺下沉误差。
10、在三角网的精度估算中最佳推算路线是指( C )。
A、所经过的三角形最多的推算路线;B、所经过的三角形最少的推算路线;C、所有的推算路线中边长权倒数最小的路线;D、所有的推算路线中边长权倒数最大的路线。
11、DS3是用来代表光学水准仪的,其中3是指(C)。
A、我国第三种类型的水准仪;B、水准仪的型号;C、每公里往返测平均高差的中误差;D、厂家的代码。
12、水准测量要求视线离地面一定的高度,可以减弱(C)的影响。
(完整版)测量常用规范、规程主要技术要求、规定汇总
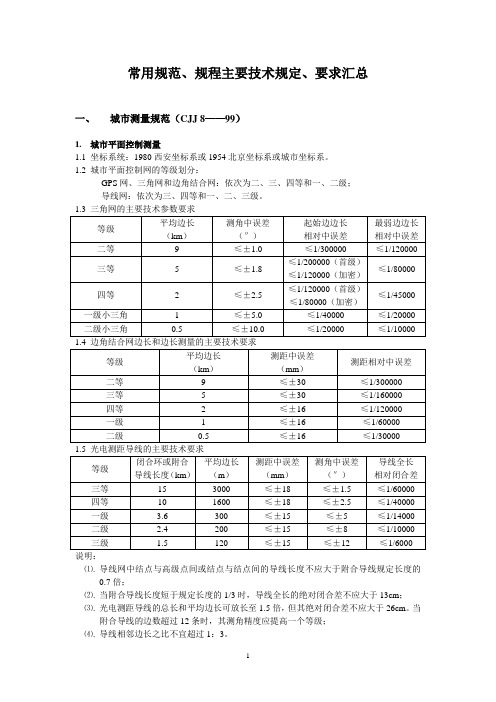
常用规范、规程主要技术规定、要求汇总一、城市测量规范(CJJ 8——99)1. 城市平面控制测量1.1 坐标系统:1980西安坐标系或1954北京坐标系或城市坐标系。
1.2 城市平面控制网的等级划分:GPS网、三角网和边角结合网:依次为二、三、四等和一、二级;导线网:依次为三、四等和一、二、三级。
说明:⑴.导线网中结点与高级点间或结点与结点间的导线长度不应大于附合导线规定长度的0.7倍;⑵.当附合导线长度短于规定长度的1/3时,导线全长的绝对闭合差不应大于13cm;⑶.光电测距导线的总长和平均边长可放长至1.5倍,但其绝对闭合差不应大于26cm。
当附合导线的边数超过12条时,其测角精度应提高一个等级;⑷.导线相邻边长之比不宜超过1:3。
0d注:n为测站数。
⑴.凡超出以上规定限差的结果,均应进行重测。
重测应在基本测回完成后并对成果综合分析后再进行。
⑵.2C较差或各测回较差超限时,应重测超限方向并联测零方向。
因测回较差超限重测时,除明显孤值外,原则上应重测观测结果中最大和最小值的测回。
⑶.零方向的2C较差或下半测回的归零差超限,该测回应重测。
方向观测法一测回中,重测方向数超过方向总数的1/3时(包括观测三个方向有一个方向重测),该测回应重测。
⑷.采用方向观测法时,每站基本测回重测的方向测回数,不应超过全部方向测回总数的1/3,否则整站重测。
⑸.基本测回成果和重测成果,应载入记簿。
重测与基本测回结果不取中数,每一测回只取一个符合限差的结果。
⑹.因三角形闭合差、极条件、基线条件、方位角条件自由项超限而重测时,应进行认真分析择取有关测站整站重测。
注:1.往返较差应将斜距化算到同一水平面上方可进行比较;2. (a+b·D)为仪器标称精度。
2. 城市高程控制测量2.1 高程系统:1985国家高程基准或沿用1956年黄海高程系统。
2.2 城市高程控制测量方法与等级:水准测量和三角高程测量。
水准测量等级依次分为二、三、四等,首级高程控制不应低于三等水准。
控制网的布设

制
已有地形图;
网
已有控制点资料,等级、投影带、投影面、
的
精度等;
布
觇标标石保存情况。
设
3、交通运输情况;
4、地形:地物、地貌
5、物资供应:人力、物资
三、图上设计
控制网的图上设计:
根据对上述资料进行分析的结果,按照有关规范的
技术规定,在中等比例尺图上以“下棋”的方法确定控
制点的位置和网的基本形式。图上设计对点位的基本要
各种比例尺航测成图时对平面控制点的密度要求
测图比例尺
每幅图 要求点数
每个三角 点控制面积
三角网 平均边长
等级
1:50 000 1:25 000 1:10 000
3 2~3
1
约150km2 约50km2 约20km2
13km 8km 2~6km
二等 三等 四等
第一节 国家控制网的布设
一、控制网的布网原则
控
➢ 三等水准:闭合300km,附合200km;
制
➢ 四等水准:附合长:80km;
网
➢ 精度要求:
的
每km水准测量的高差中数偶然中误差MΔ,
布
每km水准测量高差中数的全中误差MW,见下页。
设
➢ 埋石及密度要求:
基岩水准标石:间隔500km(一等水准)
基本水准标石: 间隔60km (一二等水准)
普通水准标石:间隔2~6km (各等水准)
15~20km,测角中误差小于±1.2″),将一等
锁环分为大致相等的四个区域,然后在这四个 区域中处再补充布设二等补充网(平均边长约
为13km,测角中误差小于±2.5″)。
20世纪60年代后:二等网以全面三角网的 形式布设在一等锁环内,四周与一等锁衔接。
关于保证三角网精度的分析与探讨

关于保证三角网精度的分析与探讨本钢矿山建设公司杨信威2009年9月10日目录一、前言二、技术设计三、现场选点与中心标石的埋设四、外业观测五、内业成果的计算与精度评定六、三角网可靠程度分析七、结论一、前言为完成地形测图、建筑施工、井巷掘进贯通等工程测量工作,必须在国家大地控制网的基础上建立施工测区平面及高程控制网,现全站仪虽然可作三边网,就目前我国建立平面控制网的方法主要还是以三角测量为主。
所以,如何提高三角网的精度,满足具体施工测量的要求,将有重要意义。
本文就以完成的南芬露天矿引水隧洞贯通测量工作为例,在具体测量工作中,如何采用必要的方法和施测手段建立三角,网满足工程测量规范及设计施工要求。
下面就以上问题加以论述、分析和探讨,请读者批评指正。
二、技术设计1、对已有控制点成果的分析整个测区坐落在南芬露天矿北部山区,控制面积约7平方公里。
欲开两条引水隧洞,分上游洞和下游洞。
上游洞3139米,下游洞1116米。
其中一段为斜井,而且边长很短,这样就大大降低了贯通精度。
施工采取相向掘进法。
所以,控制测量测设近井点要求精度很高。
对已有地形图和现场勘察了解,在侧区内有两个国家三等三角点(Ⅲ1、Ⅲ7),可作为布置三角网的起算数据。
2、布网方案的拟定根据引水隧洞贯通测量的精度要求,并参照《冶金勘察测量规范》,首级平面控制应布四等三角网。
呈半圆多边形网,由网中心的两个国家三等三角点为起算数据和观测方向,并在四等三角网基础上加密,又可构成一个一级小三角网,其控制点可直接做在洞口附近。
(见南芬露天矿引水隧洞控制网平面布置图)最后准确测定出近井点,保证隧洞正常贯通。
选定这样的平面控制网主要有以下几个优势;1/、有足够精度等级的高级控制点2/、因受地形和图形条件限制,必须首先布置四等首级控制网,并在此基础上加密3/、分两个等级三角网可组成较好的图形4/、可提高三角网的精度,保证工程施工和设计需要三、现场选点与中心标石的埋设经过技术设计、拟定布网方案及图上选点,还要经过实地选点对方案进行补充和修改,使三角网的点位达到理想要求;1、点位选在展望良好、利于扩展、土质坚实的制高点上,有利于长期保存,观测方便。
《控制测量》第4讲平面控制网的精度估算.

昆明冶金高等专科学校测绘学院
第二部分 三角锁的精度估算
一、单三角形中推算边长的中误差
设 s0 为三角形的起算边,s 为推算
边,A、B、C 为角度观测值,于是
由推算的函数式为:
计算。在计算过程中,使程序仅针对所需的推算元素计算 精度并输出供使用。
昆明冶金高等专科学校测绘学院
通常这些程序所用的平差方法都是间接平差法。设待求 推算元素的中误差、权(或权系数)分别为 M i ,Pi (Qi )。后者与 网形和边角观测值权的比例有关(对边角网而言),不具有
随机性。至于单位权中误差 ,对验后网平差来说,是由观
AA
P
Bf P
2
1
BB P
1
如果平差不是按克吕格分组平差法进行的,即全部条件都 是第一组,没有第二组条件,则在计算权倒数时应将上式 的后两项去掉。
昆明冶金高等专科学校测绘学院
F 的中误差为
mF
1 PF
式中, 为观测值单位权中误差。
二、程序估算法 此法根据控制网略图,利用已有程序在计算机上进行
近20年来,随着电子计算机的广泛应用,以近代 平差理论为基础的控制网优化设计理论获得了迅速地 发展。例如,仅在表达控制网质量的指标方面,无论 在广度和深度上,均非过去所能比。
昆明冶金高等专科学校测绘学院
精度估算的目的是推求控制网中边长、方位角或 点位坐标等的中误差,它们都是观测量平差值的函数, 统称为推算元素。估算的方法有两种。
昆明冶金高等专科学校测绘学院
第四讲 平面控制网的精度估算
测量员理论考试-1_真题(含答案与解析)-交互(565)

测量员理论考试-1(总分100, 做题时间90分钟)一、判断题1.大地水准面是由静止海水面并向大陆延伸所形成的不规则的封闭曲面。
( )SSS_JUDGEMENT正确错误分值: 1答案:正确2.比例尺的大小视分数值的大小而定,分数值越小,比例尺越大。
( ) SSS_JUDGEMENT正确错误分值: 1答案:错误3.建筑施工中的水准测量和高程测量称为抄平。
( )SSS_JUDGEMENT正确错误分值: 1答案:正确4.水平角的测量方法主要有测回法和方向观测法。
( )SSS_JUDGEMENT正确错误分值: 1答案:正确5.光电测距仪中的仪器加常数是偶然误差。
( )SSS_JUDGEMENT正确错误分值: 1答案:错误6.绝对定位原理是用一台接收机,将捕获到的卫星信号和导航电文加以解算;求得接收机天线相对于WGS-84坐标系原点绝对坐标的一种定位方法。
( ) SSS_JUDGEMENT正确错误分值: 1答案:正确7.当采用GPS定位技术建立平面控制网时,因为不要求相邻控制点间通视,因此选定控制点后不需要建立测量标。
( )SSS_JUDGEMENT正确错误分值: 1答案:正确8.地形测量中,大平板仪的安置包括对中、整平。
( )SSS_JUDGEMENT正确错误分值: 1答案:错误9.极坐标法适用于测设点离控制点较近且便于量距的情况。
( )SSS_JUDGEMENT正确错误分值: 1答案:正确10.我国建筑设计部门,在参考国际上的提法后,提出研究高层建筑物倾斜时把允许倾斜值的1/20作为观测精度指标。
( )SSS_JUDGEMENT正确错误分值: 1答案:正确二、单项选择题每道题下面有A、B、C、D四个备选答案。
请从中选择一个最佳答案。
11.中误差反映的是( )。
SSS_SINGLE_SELA 一组误差离散度的大小B 真差的大小C 似真差的大小D 相对误差的大小分值: 1答案:A12.加粗等高线是指( )。
控制网的布设
工程三角控制网旳特点:
a、平均边长比国家三角网小旳多。
b、三角网旳等级多。
控
c、各等级控制网均可作为测区旳首级控制网。
制
d、三、四等三角网起算边相对中误差,按首
网
级网和加密网分别看待。
旳
布
设
2.导线网旳布设方案
光电测距导线旳主要技术要求
控
闭合环或附合 平均边长 测距中误差 测角中误差 导线全长相
制
第一节 国家控制网旳布设
一、控制网旳布网原则
1、分级布网、逐层控制;
控
我国领土广阔,地形复杂,不可能用最高精
制
度和较大密度旳控制网一次充满全国。为了适时
网 旳
地保障国家经济建设和国防建设用图旳需要,根
布
据主次缓急而采用分级布网、逐层控制旳原则是
设
十分必要旳。即先以精度高而稀疏旳一等三角锁
尽量沿经纬线方向纵横交叉地迅速充满全国,形
控
要求是: (1)从技术指标方面考虑
制
图形构造良好,边长适中;便于扩展和加密低档网,
网
点位要选在视野广阔,展望良好旳地方;为减弱旁折光 旳影响,要求视线超越(或旁离)障碍物一定旳距离;
旳 布
点位要长久保存,宜选在土质坚硬,易于排水旳高地上。 (2)从经济指标方面考虑
充分利用制高点和高建筑物等有利地形、地物,以
多种百分比尺航测成图时对平面控制点旳密度要求
• 测图百 分比尺
每幅图 要求点数
每个三角 点控制面积
三角网 平均边长
等级
1:50 000 1:25 000 1:10 000
3 2~3
1
约150km2 约50km2 约20km2
《控制测量》模拟试卷填空简答

控制测量考试模拟试卷一、单项选择题1、因瓦水准尺的“基辅差”一般为( D) 。
A、351050;B、315500;C、301550 ;D、305150 。
2、水准仪i角误差是指水平视线(视准轴)与水准管轴之间( A )。
A、在垂直面上投影的交角;B、在水平面上投影的交角;C、在空间的交角。
3、导线测量中横向误差主要是由( C)引起的。
A、大气折光;B、测距误差;C、测角误差;D、地球曲率。
4、已知椭球面上某点的大地坐标,求该点在高斯投影面上的直角坐标叫做( C)。
A、坐标正算;B、坐标反算;C、高斯正算;D、高斯反算。
5、在三角测量中,最弱边是指( C)。
A、边长最短的边;B、边长最长的边;C、相对精度最低的边;D、边长中误差最大的边。
6、观测水平角时,采用盘左、盘右取平均可消除( C )的影响。
A、竖直度盘指标差;B、水平度盘偏心差;C、水平度盘分划误差;D、照准部旋转引起底部位移误差。
7、DJ2是用来代表光学经纬仪的,其中2是指( C)。
A、我国第二种类型的经纬仪;B、经纬仪的型号;C、该型号仪器水平方向观测一测回的中误差;D、厂家的代码。
8、水准线路设置成偶数站可以消除( B )的影响。
A、i角误差;B、仪器下沉误差;C、标尺零点差;D、大气折光差。
9、水准测量时,一条线路采用往、返测取中数可以消除( C )的影响。
A、i角误差;B、仪器下沉误差;C、标尺零点差;D、标尺下沉误差。
10、在三角网的精度估算中最佳推算路线是指( C )。
A、所经过的三角形最多的推算路线;B、所经过的三角形最少的推算路线;C、所有的推算路线中边长权倒数最小的路线;D、所有的推算路线中边长权倒数最大的路线。
11、DS3是用来代表光学水准仪的,其中3是指(C)。
A、我国第三种类型的水准仪;B、水准仪的型号;C、每公里往返测平均高差的中误差;D、厂家的代码。
12、水准测量要求视线离地面一定的高度,可以减弱(C)的影响。
水准网最弱点精度评估的方法研究

水准网最弱点精度评估的方法研究万丽娟;闫育超【摘要】The weakest points' precision assessment is an important index for leveling network performance , to eval-uate the most weakness precision is essential during leveling network design phase .While traditional adjustment software cannot evaluate precision when there is no specific observation data during design phase , so this paper put forward the most weakness precision evaluation method on the basis of the theory of indirect adjustment combining with the experi -ence test area , also produced the most weakness accuracy assessment programming on MATLAB and made an example . The result indicates that this evaluation method is feasible and has certain reference value to similar projects .%水准网最弱点精度评估是水准网性能的一个重要指标,前期水准网设计阶段必须进行最弱点精度评估并辅助调整网型设计. 由于设计阶段无具体观测数据,传统平差软件无法进行评估,因此本论文在间接平差的理论基础上结合测区经验,提出新的最弱点精度评估方法,并基于matlab进行最弱点精度评估程序设计且进行实例运用,验证了此评估方法的可行性,对类似工程具有一定的参考价值.【期刊名称】《城市勘测》【年(卷),期】2015(000)006【总页数】4页(P105-108)【关键词】水准网;最弱点;评估;MATLAB【作者】万丽娟;闫育超【作者单位】广州市城市规划勘测设计研究院,广东广州 510000;太原市勘察测绘研究院,山西太原 030000【正文语种】中文【中图分类】P207在实际水准网建设项目中,前期的水准路线选择和水准网布设是水准网项目设计中的一项非常重要的内容,其中水准网最弱点的估算精度是评价一个水准网可行性和优良性的关键指标,如果最弱点精度不达标则网型肯定不合格,因此必须对网型实时进行最弱点精度估算,辅助调整网型设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三角网最弱边的精度估算
一、混合三角锁推算边长的精度估算 1、单三角形中推算边长的中误差
S 0------起始边 S------推算边 A ,B ,C------角度观测值 ①条件式 0
180=-++C B A
即 01=+++w v v v C B A
②法方程式
031=+w k
③S 的函数式 B A S S sin sin 0
=
SctgA A
B A A S B
A
S A
S f A ===∂∂=
sin sin cos sin sin cos 0
同样 SctgB f B -=
0=C f
④求权倒数 [][][]aa af ff P S
2
1-
=
{}{}
ctgActgB
ctgB ctgA S
ctgB ctgA S ctgB ctgA S P S ++=--
+=2
2
2
2
22
2
2
)()
(3
2)
(3
1)
()
(1
⑤中误差
{}ctgActgB
ctgB ctgA S
m m S ++'
''
'=
2
2
2
)()
(32ρ
⑥相对中误差
{}ctgActgB
ctgB ctgA m S m S ++'
''
'=2
2
)()
(3
2ρ
单三角形中设 ctgB ctgA B ctg A ctg R ⨯++=22
R m S
m S 3
2ρ'
'''=
所以单三角形的权倒数
三三
R P 3
21=
2、混合三角锁中推算边长的中误差
所以混合锁推算边权倒数为:中四三R R R P
∑+
∑+
∑⨯=
2
12
13
21
通过上面公式可看出: 三角形权倒数:
三
三
R P ∑⨯=321
大地四边形:
四四R P ∑=
211
中点多边形:
中中
R P ∑=
2
11
不考虑起算边精度推算边的相对精度
p
m s m s 1ρ
β
=
考虑起算边精度推算边的中误差
2
2
2
2
2)21
2132(b s
m R R R s m m +∑+∑+∑⨯=
中四三ρ
β
m b 起算边中误差
m b 如何计算?;相对精度如何计算?
3、 两端均有起算边的三角网最弱传距边边长中误差计算公式[6]:
以图4.1单三角锁为例说明公式的推导过程。
当锁两端有起算边s 1和s 2时,最弱传距边大体上在锁的中央,即中s (见图4.1)。
图 4.1 两端有起算边最弱边精度估算
22
2122212''s s s s s m m m m m
+'⋅'=
中。