无线电定位原理与技术
无线电定位原理与技术

无线电定位原理与技术TOA是通过测量信号从发射器发射到接收器接收的时间来确定距离的。
当无线电信号从发射器发出后,经过空气传播到达接收器,接收器接收到信号后会测量从信号发出到接收到的时间差,再根据信号在空气中的传播速度以及时间差来计算距离。
RSSI则是通过测量接收到的信号强度来确定距离的。
由于信号在传播过程中会遇到阻尼、衰减等因素的影响,接收到的信号强度会随着距离的增加而减弱,因此可以根据接收到的信号强度来推测距离。
多普勒效应测量则是通过测量接收到的信号频率的变化来确定移动物体的速度和方向的。
当移动物体靠近接收器时,接收到的信号频率会变高;当移动物体远离接收器时,接收到的信号频率会变低。
通过测量频率的变化量,可以推测物体的速度和方向。
GPS是使用最广泛的无线电定位技术之一,它利用一组卫星在轨道上发射无线电信号,并通过接收器接收到这些信号来计算自身的位置。
通过接收到多个卫星的信号,并使用三角测量的原理,可以准确地确定自身的位置。
基站定位是通过使用移动通信网络中的基站来确定移动设备的位置。
当移动设备与基站进行通信时,基站会记录下与设备通信的信号参数,通过测量被记录的信号参数的变化,可以计算设备的位置。
无源定位是一种通过被动地接收到的无线电信号来确定设备位置的技术。
这种技术适用于无法主动发送信号的设备,例如无线电频谱分析仪、无线电信号监测系统等。
通过分析接收到的信号参数,并结合信号传播模型和统计方法,可以推测设备的位置。
总之,无线电定位技术通过测量信号的到达时间、信号强度和频率变化等参数来确定移动设备或物体的位置。
通过不同的实现方式和算法,可以实现各种应用场景下的定位需求。
测绘技术中的无线电定位原理与技巧
测绘技术中的无线电定位原理与技巧一、引言测绘技术在现代社会中起着重要的作用,为各行业提供准确的地理信息和空间数据。
其中,无线电定位技术是测绘中常用的一种手段,它利用无线电信号进行测量和定位,具有高精度和高效率的优势。
本文将分析无线电定位原理以及技巧,探讨其在测绘中的应用。
二、无线电定位原理无线电定位原理基于电磁波的传播和接收原理,利用无线电信号的到达时间差异或信号强度差异等来确定目标物体的位置。
其基本原理可分为到达时间差方法和信号强度差方法两类。
到达时间差方法利用信号发射源到接收点的距离差异来计算目标物体的位置。
当一个接收器接收到两个或多个信号发射源发出的信号时,通过计算信号到达接收器的时间差,可以得到信号发射源所对应的距离差值。
结合接收器位置和信号发射源的已知坐标,就可以通过多边定位原理计算目标物体的具体位置。
信号强度差方法利用信号在传播过程中衰减的规律,通过测量信号接收点的信号强度差异推算目标物体的位置。
一般情况下,信号强度与距离呈反比关系。
因此,通过测量目标物体与多个接收器之间的信号强度差异,可以得到目标物体与各个接收器之间的距离比例关系。
结合接收器位置和信号发射源的已知坐标,就可以推算目标物体的位置。
三、无线电定位技巧1. 多接收器布局无线电定位技术的定位精度与接收器的布局密切相关,合理的布局可以提高测量的准确性。
通常情况下,使用三个以上的接收器可以进行多边定位,提高测量的可靠性。
合理的接收器布局包括选择接收器的位置,使得信号发射源与接收器构成能够产生明显差异的角度。
同时,可以考虑使用不同类型的接收器,以获取更多的数据并减小测量误差。
2. 信号预处理技术无线电信号容易受到传播环境和干扰的影响,为了提高定位精度,需要对信号进行预处理。
常见的信号预处理技术包括滤波、降噪和增强等。
滤波技术可以去除噪声和干扰信号,提取目标信号;降噪技术可以消除信号传播过程中的干扰,提高信号质量;增强技术可以通过放大信号的强度,提高信号的可检测性。
无线电定位技术综述

陕西理工学院电子信息讲座论文无线电定位技术作者:***指导教师:**专业名称:电子信息工程班级:电子101学号:2022年4月26日无线电定位技术摘要:无线电定位一般分为有源定位和无源定位,一般为雷达台站、通讯卫星(或侦察飞机)以及接收仪的设备的运用,通过对空间三位位置的分析再由信号的处理将其显示出来的。
本文通过对雷达台站、卫星以及空间定位方法介绍及信号的调制与解调等方面的论述来说明当今定位系统(GPS)以及未来的走向做一定的分析。
关键字:有源定位;半有源定位;无源定位;雷达台站;通讯卫星;空间TODA定位技术;信号的调制与解调。
Abstract: radio positioning is generally divided into active and passive location, generally for radar stations, communications satellite ( or reconnaissance aircraft ) and a receiving instrument equipment to use, based on the analysis of space three position by the signal processing to be displayed. This article through to the radar stations, satellites and space positioning method is introduced and the modulation and demodulation of signal aspects and so on to explain current positioning system ( GPS ) and future to do some analysis.Keywords: active positioning; semi active positioning; passive location; radar stations; communication satellite; space TODA positioning technology; signal modulation and demodulation.引言:随着当今时代的发展,无线电技术像雨后春笋般迅速发展,经历了二十世纪的洗礼,无线电技术已经运用到了我们日常生活的方方面面。
无线电定位原理与技术
U
0
-0.5
-1
0
0.1
0.2
0.3 t (s)
0.4
0.5
0.6
Frequency Analysis 1000 Fd=12.6953(Hz) Vr=0.18093(m/s)
800
600
U
400 200 0
0
5
10
15 f (Hz)
20
25
30
iamwuguihua@
iamwuguihua@
iamwuguihua@
Dept. of Electronic Engineering
iamwuguihua@
实验内容 1. 连续波雷达测速实验(必做) 2. 线调频信号及匹配滤波仿真实验(二选一) (加分) 3.矩形脉冲串谱分析实验(二选一)
iamwuguihua@
实验一:连续波雷达测速实验
• 将相对运动所引起的接收频率与发射频率之间的差频称为多普勒频 率,用 表示用 fd 表示
0
Amplitude,dB
-10 -20 -30 -40 -50 -15 -10 -5 0 Time in sec B Chirp signal after matched filter (Zoom) 5 10
emulational sinc
15
0 -4
Amplitude,dB
-13.4
emulational sinc
2vf 0 2v fd fr f0 f0 cv c
f d d / 2 2vr
iamwuguihua@
实验一:连续波雷达测速实验
连续波发射机
室内无线电定位技术与定位算法

质心算法
中包含信标节点的标识号ID和位置信息。
当未知节点在一段侦听时间内接收到来 自不同信标节点的信标信号数量超过某 一个阀值后,该节点就认为能与该信标 节点联通,并就此确定自身位置为所有
TOA(Time of Arrival)是 基于信号到达时间的测距方 法,它是已知节点的信号传 播速度,再根据信号的传播 时间来计算节点间的距离。 在一个节点接受到多个邻居 锚节点的信息后,再利用三 点定位法或者两点定位法, 来确定该节点的坐标位置。
基于TOA的定位
t1 t2
t3
未知节点 锚节点
20
局域室内无线电定位技术与定位算法
定位算法
(1)基于测距技术的节点定位算法
TDOA(Time Difference of Arrival)是根据同一节点发送两 个不同信号的到达时间差来测距 的,在时钟同步的条件下,同时 发射两种信号,由锚节点计算出 收到两种信号到达的时间差,计 算出网络节点到邻居锚节点的距 离信息,然后利用三角定位方法 进行定位。
优势:
红外线室内定位技术
较高的室内定位精度,抗干扰能力强;
缺点
红外线只能视线传播,穿透性能极差,当标识被遮挡时就无法正 常工作,也极易受灯光、烟雾等环境因素影响明显;
传输距离不长,使其在布局上,无论哪种方式,都需要在每个遮 挡背后、甚至转角都安装接收端,布局复杂,成本较高
应用:
适用于实验室对简单物体的轨迹精确定位记录以及室内自走机器
磁场定位技术
离线建图
地磁 测量 模块
位置坐标 (x1,y1) (x2,y2)
……. (xn,yn)
地磁数据 Mx1,My1,Mz1 Mx2,My2,Mz2
……. Mx3,My3,Mz3
基于无线电技术的定位系统分析与设计
基于无线电技术的定位系统分析与设计无线电技术是一种利用无线电波传播信号的技术,广泛应用于通信、定位、导航和雷达等领域。
其中,无线电定位技术是基于测量无线电波的传播特性,通过测量信号传播时间、信号强度或者信号相位等参数,来确定目标的位置。
无线电定位技术具有广泛的应用领域,包括车辆定位、物联网定位、室内定位等。
本文将对无线电技术的定位系统进行分析与设计。
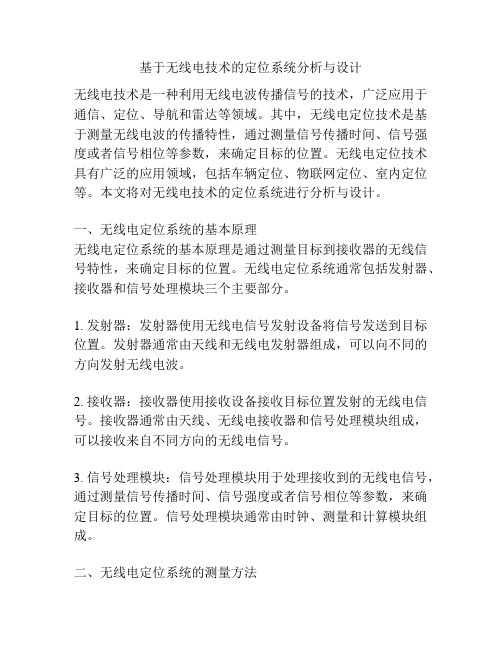
一、无线电定位系统的基本原理无线电定位系统的基本原理是通过测量目标到接收器的无线信号特性,来确定目标的位置。
无线电定位系统通常包括发射器、接收器和信号处理模块三个主要部分。
1. 发射器:发射器使用无线电信号发射设备将信号发送到目标位置。
发射器通常由天线和无线电发射器组成,可以向不同的方向发射无线电波。
2. 接收器:接收器使用接收设备接收目标位置发射的无线电信号。
接收器通常由天线、无线电接收器和信号处理模块组成,可以接收来自不同方向的无线电信号。
3. 信号处理模块:信号处理模块用于处理接收到的无线电信号,通过测量信号传播时间、信号强度或者信号相位等参数,来确定目标的位置。
信号处理模块通常由时钟、测量和计算模块组成。
二、无线电定位系统的测量方法无线电定位系统的测量方法包括时间测量、强度测量和相位测量等。
1. 时间测量:时间测量是一种通过测量信号传播时间来确定目标位置的方法。
在发射器发送信号后,接收器开始计时,当接收到信号时,停止计时。
通过信号传播速度和时间差,可以计算出目标位置与接收器的距离。
综合多个接收器的测量结果,可以确定目标的位置。
2. 强度测量:强度测量是一种通过测量信号强度来确定目标位置的方法。
由于无线电信号的衰减规律,信号强度会随着距离的增加而减弱。
通过测量接收到信号的强度,可以推算出目标与接收器的距离。
综合多个接收器的测量结果,可以确定目标的位置。
3. 相位测量:相位测量是一种通过测量信号相位差来确定目标位置的方法。
在发射器发送信号后,接收器接收到信号的相位差与目标位置有关。
《无线定位技术》课件

将无线定位技术部署到实际应用场景 中,进行定期维护和更新,保证系统 的稳定性和可靠性。
04
无线定位技术优缺点
无线定位技术的优点
高精度定位
无线定位技术可以提供厘米级 甚至毫米级的定位精度,满足
各种高精度应用需求。
实时性
无线定位技术可以实时获取目 标的位置信息,对于需要快速 响应的应用场景非常有利。
详细描述
无线定位技术可以为公共安全领域提供重要的位置信息支持,例如在火灾、地震等灾害发生时,该技术可以帮助 救援人员快速定位受困人员,提高应急响应速度。同时,该技术还可以用于追踪犯罪嫌疑人,提高案件侦破效率 。
THANKS
感谢观看
无线定位技术在物流行业中的应用
总结词
优化物流配送,提高运营效率
详细描述
无线定位技术可以帮助物流企业实时跟踪货物的位置信息,优化配送路线,提 高物流配送的准确性和及时性。此外,该技术还可以协助企业进行仓储管理, 提高库存周转率,降低运营成本。
无线定位技术在公共安全领域中的应用
总结词
提升应急响应速度,保障公共安全
02
基于距离的定位技 术
包括RSS(接收信号强度)、 AOA(到达角度)和指纹地图匹 配等。
03
混合定位技术
结合基于时间和基于距离的定位 技术,以提高定位精度和可靠性 。
无线定位技术的误差来源
多径效应
由于电磁波在传播过程中会受到 建筑物、树木等障碍物的反射和 折射,导致接收到的信号强度和 相位发生变化,影响定位精度。
困难或无法定位。
高能耗
无线定位技术需要大量的计算 和传输,导致能耗较高,需要
频繁更换或充电电池。
安全问题
无线信号容易被截获或干扰, 存在一定的安全风险。
常见的七种无线定位技术总结

常见的七种无线定位技术总结
常见的无线定位技术有以下七种:
红外线定位、超声波定位、蓝牙定位、射频识别定位、超宽带定位、无线高保真定位和Zigbee(传感器)定位。
红外线定位
基本原理:主要通过在已知节点处的红外线发射设备发射红外线,然后在待测节点布置好的光学传感器接收这些红外信号,经过对红外信号的处理,计算出距离,从而达到定位效果。
优缺点:一是红外线传播距离较短,二是红外线没有越过障碍物的能力,这就要求定位环境没有障碍物,或说定位只能在可视距条件下。
超声波定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二:线调频信号及匹配滤波仿真实验
• 在LFM信号时宽带宽积很大的时候,频谱近似:
S()A
2exp{j[(0)2
k
2k
]} 4
0
0
2
o th e r s
LFM信号能否近似的表示成为上式,取决于时宽带宽积D。当D越大, 近似程度越高,通常雷达体系中,D都在几千到几万,满足条件, 可以近似为上式。
• 将相对运动所引起的接收频率与发射频率之间的差频称为多普勒频 率,用 表示用 f d 表示
fdfrf0 c2 vfv0c2vf0
fd
d
/22vr
实验一:连续波雷达测速实验
连续波发射机
测速传感器
混频器
传感器输出信号
放大滤波
AD
串行接口
DSP
PC机 FFT
实验一:连续波雷达测速实验
实验要求: 1.掌握雷达测速原理, 2.了解连续波雷达测速实验仪器原理及使用。 3. 使用Matlab对实验数据进行分析,得到回波多
0.4
0.2
0
-15
-10
0
-10
-20
-30
-40
-50
-15
-10
0 -4 -13.4
Chirp signal after matched filter
-5
0
5
Time in sec B
Chirp signal after matched filter
-5
0
5
Time in sec B
Chirp signal after matched filter (Zoom)
• 通过线性调频信号(LFM)、匹配滤波器和脉冲串谱分析的仿真实验, 利用数字信号处理理论,借助MatLab信号处理软件更好地掌握雷达 数字信号处理的整体过程。
实验内容 1. 连续波雷达测速实验(必做)
2. 线调频信号及匹配滤波仿真实验(二选一) (加分)
3.矩形脉冲串谱分析实验(二选一)
实验一:连续波雷达测速实验
实验二:线调频信号及匹配滤波仿真实验
• 雷达发射LFM脉冲信号,固定目标的回波时域表示:
S i(t) A re c t(t T tr)c o s(0 (t tr) k(t 2 tr)2)
• 对应的匹配滤波器的传输函数近似(大时宽带宽积下)为:
H()exp{j[(0)2]}
2k 4
0
2
实验二:线调频信号及匹配滤波仿真实验
实验一:连续波雷达测速实验
U
1 0.5
0 -0.5
-1 0
1000 800 600 400 200 0 0
Echo waveform
0.1
0.2
0.3
0.4
0.5
0.6
t (s)
Frequency Analysis
Fd=12.6953(Hz) Vr=0.18093(m/s)
5
10
15
20
25
30
f (Hz)
实验二:线调频信号及匹配滤波仿真实验
Real part of chirp signal
0.5
0
-0.5
-1
-5
-4
-3
-2
-1
0
1
2
3
4
5
Time in u sec
Magnitude spectrum of chirp signal
20
15
10
5
-10
-8
-6
-4
-2
0
2
4
6
8
10
Frequency in MHz
实验三:矩形脉冲串谱分析实验
矩形脉冲串谱分析主要考虑脉冲宽度和脉冲数对频谱的影
响,其中脉冲宽度用占空比相对衡量,典型的矩形脉冲
串频谱图如下。
1.2
1
0.8Байду номын сангаас
0.6
0.4
无线电定位原理与技术
助教:吴桂华,孙思博
Dept. of Electronic Engineering
无线电定位原理与技术
• 测速、测距、测角是雷达最基本的基本功能。随着技术不断提高, 新体制雷达不断涌现,雷达的基本功能在被强化的同时,许多新的 功能亦被开发,比如雷达成像,目标识别等等。
• 基于连续电磁波的测速雷达,使我们对雷达测速原理有了更清楚的 感性认识,对雷达工作的基本原理更好的把握和理解。
0
-15
-10
0
-10
-20
-30
-40
-50
-15
-10
0 -4 -13.4
Chirp signal after matched filter
-5
0
5
Time in sec B
Chirp signal after matched filter
-5
0
5
Time in sec B
Chirp signal after matched filter (Zoom)
U
实验二:线调频信号及匹配滤波仿真实验
• LFM信号以其优越的频谱性能广泛应用于雷达和众多电子工程中, 匹配滤波器在相参滤波分析中也得到广泛的应用。
• 线调频(LFM)信号时域表达式:
S(t)Arect(T t )cos(0tk2 t2)
• k是调频斜率,并且与调制频偏 的关系是:
k 2f
TT
• 匹配滤波器输出:
S0 Si()H()exp(jtd) A 2 ejtd
k
• 匹配滤波器时域输出:
So (t)
1
2
So ()ejtd
A D sin[ B(t td )] ei2 f0(ttd ) B(t td )
0
2
DBT
实验二:线调频信号及匹配滤波仿真实验
Amplitude
1
0.8
0.6
emulational sinc
10
15
emulational sinc
10
15
emulational sinc
Amplitude,dB
Amplitude,dB
-3
-2
-1
-0.5
0
0.5
1
2
3
Time in sec B
实验二:线调频信号及匹配滤波仿真实验
实验要求:
1.掌握线调频信号及其频谱特征, 2.使用Matlab对线调频信号及其频谱进行仿真 3.掌握匹配滤波理论, 4.使用Matlab线调频信号进行匹配滤波仿真。 5.讨论时宽带宽积对线调频信号频谱和匹配滤波的影响。
率和目标速度。
普勒频
4.分组完成实验任务,自己操作探头,获得实验数据。
实验一:连续波雷达测速实验
实验过程 1.每小组采集快中慢三组数据,每组数据2048点,采样频率为1024Hz
2.从每组数据中分别选取波形较好的512点,作出时域波形与频谱,并 求出目标速度,其中,发射波频率为10GHz(参考函数:data_open.m)
emulational sinc
10
15
emulational sinc
10
15
emulational sinc
Amplitude,dB
Amplitude,dB
-3
-2
-1
-0.5
0
0.5
1
2
3
Time in sec B
实验二:线调频信号及匹配滤波仿真实验
Amplitude
1
0.8
0.6
0.4
0.2