最优化:可行方向法ppt课件
合集下载
最优化方法课件_解可新1
向量范数
定义1.1.5 如果向量x∈Rn 的某个实值函数||x||, 满足条件 (1)||x||≥0(||x||=0当且仅当x=0)(正定性); (2)||ax||=|a|· ||x||(对于任意a∈R); (3) ||x+y||≤||x||+||y||(三角不等式); 则称||x||为Rn 上的一个向量范数.
30
安康学院数学与统计系 应用数学教研室
可行方向
定义1.2.2(可行方向) 已知区域 , x k∈ D , 对于向量pk≠0,若存在实数b >0, 使得对任意的 a∈(0,b ),有:xk+apk∈D, 则称pk为点xk处关于区域D的可行方向. 对于D的内点(存在邻域包含于D),任意方向可 行,对于边界点(任意邻域既有D的点也有不在D 中的点),则有些方向可行,有些方向不可行. 若下降方向关于域D可行,则称为可行下降方向.
j
试设计一个调运方案,在满足需要的同时使总 运费最省.
7
安康学院数学与统计系 应用数学教研室
由题意可画出如下的运输费用图:
a1
A1 A2 B1 B2
b1
产量
a2
b2
需求量
am
Am
Bk
bk
设Ai→Bj的水泥量为xij,已知Ai→Bj单价为cij,单 位为元,则总运费为:
S cij xij
i 1
n
1 p p
∞-范数是p-范数的极限
|| x || lim || x || p
p
24
安康学院数学与统计系 应用数学教研室
常用的向量范数
对向量x=(1,-2,3)T,有
|| x ||1 6,
|| x ||2 14 3.74166, || x ||3 3 36 3.30193,
最优化方法全部PPT课件
最优化方法
(最优化课件研制组)
编辑课件
1
最优化方法
为了使系统达到最优的目标所提出的各种求解方法
称为最优化方法。最优化方法是在第二次世界大战前后,
在军事领域中对导弹、雷达控制的研究中逐渐发展起来
的。
最优化方法解决问题一般步骤:
(1)提出需要进行最优化的问题,开始收集有关资 料和数据;
(2)建立求解最优化问题的有关数学模型,确定变
向量内积的性质:
ⅰ) ,,(对称性);
ⅱ) , , , k,k,(线性性);
ⅲ) , 0 ,当且仅当 0 时,, 0(正定性);
编辑课件
13
向量的长 ,
单位向量 1
向量的夹角
,
,
arccos
,
0 ,
向量的正交 , ,0(正交性)
2
1.可微
定义1.7 设 f:D R n R 1,x0 D .如果存在 n
sx 0
sx 0
x* x*
f f x*
编辑课件
9
1.4 二维问题图解法
二维极值问题有时可以用图解的方式进行求解,有 明显的几何解释。
例 求解 m infx ,y x 2 2 y 1 2
编辑课件
10
图解法的步骤:
①令 fx,yx22y 1 2c,显然 c 0 ;
②取 c0,1,4,9, 并画出相应的曲线(称之为等值线).
解法:Lagrange乘子法
1.2 实例
数据拟合问题 原料切割问题 运输问题 营养配餐问题 分配问题
1.3 基本概念
1. 最优化问题的向量表示法
设 xx1,x2, ,xnT 则
m i n fx 1 ,x 2 , ,x n 编辑课m 件 i n fx (1)
(最优化课件研制组)
编辑课件
1
最优化方法
为了使系统达到最优的目标所提出的各种求解方法
称为最优化方法。最优化方法是在第二次世界大战前后,
在军事领域中对导弹、雷达控制的研究中逐渐发展起来
的。
最优化方法解决问题一般步骤:
(1)提出需要进行最优化的问题,开始收集有关资 料和数据;
(2)建立求解最优化问题的有关数学模型,确定变
向量内积的性质:
ⅰ) ,,(对称性);
ⅱ) , , , k,k,(线性性);
ⅲ) , 0 ,当且仅当 0 时,, 0(正定性);
编辑课件
13
向量的长 ,
单位向量 1
向量的夹角
,
,
arccos
,
0 ,
向量的正交 , ,0(正交性)
2
1.可微
定义1.7 设 f:D R n R 1,x0 D .如果存在 n
sx 0
sx 0
x* x*
f f x*
编辑课件
9
1.4 二维问题图解法
二维极值问题有时可以用图解的方式进行求解,有 明显的几何解释。
例 求解 m infx ,y x 2 2 y 1 2
编辑课件
10
图解法的步骤:
①令 fx,yx22y 1 2c,显然 c 0 ;
②取 c0,1,4,9, 并画出相应的曲线(称之为等值线).
解法:Lagrange乘子法
1.2 实例
数据拟合问题 原料切割问题 运输问题 营养配餐问题 分配问题
1.3 基本概念
1. 最优化问题的向量表示法
设 xx1,x2, ,xnT 则
m i n fx 1 ,x 2 , ,x n 编辑课m 件 i n fx (1)
最优化 PPT课件
• 另外也可用学术味更浓的名称:“运筹 学”。由于最优化问题背景十分广泛,涉 及的知识不尽相同,学科分枝很多,因此 这个学科名下到底包含哪些分枝,其说法 也不一致。
• 比较公认的是:“规划论”(包括线性和
非线性规划、整数规划、动态规划、多目
标规划和随机规划等),“组合最优化”,
“对策论”及“最优控制”等等。
j
1, 2,L
,n
(5)
14
nn
min
cij xij
i 1 j 1
n
xij 1, i 1, 2,L
,n
s.t.
j 1 n
(5)
xij 1, j 1, 2,L , n
i1
xij
0
或 1 ,i,
j
1, 2,L
,n
(5)的可行解既可以用一个矩阵(称为解矩阵)表示,其每行每列均有且只
mn
min
cij xij
i 1 j 1
n
xij ai ,
i 1, , m
j 1
s.t.
m xij bj ,
j 1,2, , n
i 1
xij
0
11
对产销平衡的运输问题,由于有以下关系式存在:
n
bj
j1
m
i1
n xij
j1
n m
j1 i1
xij
费的总时间最少?
引入变量 xij ,若分配 i 干 j 工作,则取 xij 1,否则取 xij 0 。上
述指派问题的数学模型为
nn
min
cij xij
i 1 j 1
n
xij 1,i 1, 2,L
,n
j1
最优化方法图解法和LP基本定理PPT课件
为非基向量.
3. 基变量: 基向量对应的变量称为基变量,非基向量对应的变
量称为非基变量(自由变量)。
x1 x4
5 1
A
10
6
1 1 0
2
0
1
5 1
B2
10
0 ,
例如:对于基B2而言,x1 , x4是基变量,x2 , x3 , x5是非基变量。
思考:基变量的选取唯一吗?取法有多少种?
第20页/共25页
x1 1.9x2 3.8
第4页/共25页
max z 3x1 5.7 x2
例2. x1 1.9x2 10.2
s.t
.
x1 x1
1.9 x2 1.9 x2
3.8 3.8
x1 1.9x2 3.8
x2
X1 + 1.9X2 = 10.2 (≤)
(3.8,4)
D可行域
max Z
2) xj hj (hj 0) 引入 yj xj hj , 则 yj 0;
3) x j 0 令 yj xj , 则 yj 0;
4)
x
的符号无限制
j
引入
y' j
0,
y'' j
0,
n
令x
n
j
y' j
y'' j
, 代入模型消去x j
5) aij x j bi
aij x j xi' bi , xi' 0
第一节 图解法
➢确定可行域: 画约束直线,确定满足约束条件的半平
面,所有半平面的交集,即为线性规划的 可行域。
➢确定目标函数的等值线及优化方向: 画一条目标函数等值线,并确定目标函数 优化的方向。
可行方向法
a1 , a2 ,, am 和 b 是 n
维
的向量 p
T ai p 0, i 1, 2,, m
T b p0
也满足
的充要条件是,存在非负数
i 1
m b i ai .
Farkas引理的几何解释:
1 , 2 ,, m
,使得
T
j I ( x).
I ( x)是x 起作用约束集
证明:充分性
d 设 x 是问题(1)可行解,满足定理条件。来自必要性: d 是可行方向
T 是 的下降方向,则有 d x f ( x) d ,因此 0
T d 从 x 出发,选择 ,应使f ( x) d越小越好。
所以规划问题: min f ( x)T d ,
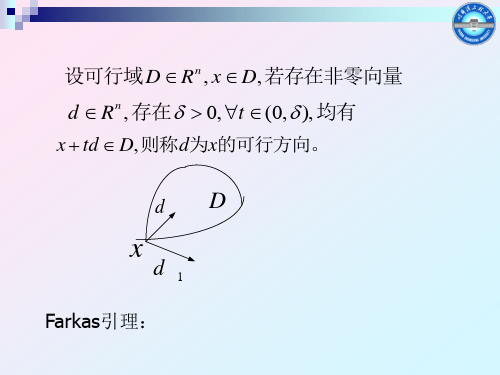
设可行域D R , x D, 若存在非零向量
n
d R , 存在 0, t (0, ),均有
n
x td D, 则称d为x的可行方向。
d
D
1
x
d
Farkas引理:
首先介绍两个引理,这两个引理本身在最优化理论中 处于很重要的地位。
引理4.7(Farkas) 设 向量,则满足
(1)
min f ( x),
T T
x Rn i 1,, l j 1, , m
s.t. i x bi 0
j x bj 0
(1’)
定理:设
x 是约束问题的可行点,则 d 为
x 可行方向的充分必要条件是:
iT d 0, i 1,2, l
j d 0,
可行方向法
1、可行方向的两个相关结论
d是x D的可行方向 , 则gi ( x)T d 0 i I ( x)
最优化:可行方向法概要
f ( x ) T d 0 T ai d 0, i I ( x ) 无非零解 a T d 0, j E j
x是问题(13.1) 的KKT点
由上面的分析, 我们有下列结论:
定理13.1.1 设x D, d是线性规划问题 (13.2)的解 , 则 (1) 若f ( x ) T d 0, 即d 0, 则x是问题 (13.1)的KKT点; (2) 若f ( x )T d 0, 即f ( x )T d 0, 则d是函数 f在可行 点x处的一个下降可行方向 .
情形2 : i I \ I ( x ), 但a d 0
T i
显然, 对任意的t 0, 我们有 aiT ( x td ) aiT x taiT d bi , i I \ I ( x )
情形3 : i I \ I ( x ), 但a d 0.
若要使 bi aiT x t , T ai d bi aiT x T t min T i I \ I ( x ), ai d ai d
由定理13.1.1知, 当(13.2)的解d 0时, x不是KKT点, 我们 需计算新的可行点 : x x td D 其中t由线性搜索产生的步长
2.线性搜索—计算步长
为确保 x x td D 关于t的计算, 我们考虑三种情形 :
情形1 :i I ( x )及 j E ,
min s.t. f ( x ) T d aiT d 0, i I ( x ) aT j d 0, j E || d || 1
(13.2)
确保目标函数有界
约束 || d || 1也可写成如 || d || 1等其它有界形式
设(13.2)的最优解为d , 则f ( x ) d 0.
x是问题(13.1) 的KKT点
由上面的分析, 我们有下列结论:
定理13.1.1 设x D, d是线性规划问题 (13.2)的解 , 则 (1) 若f ( x ) T d 0, 即d 0, 则x是问题 (13.1)的KKT点; (2) 若f ( x )T d 0, 即f ( x )T d 0, 则d是函数 f在可行 点x处的一个下降可行方向 .
情形2 : i I \ I ( x ), 但a d 0
T i
显然, 对任意的t 0, 我们有 aiT ( x td ) aiT x taiT d bi , i I \ I ( x )
情形3 : i I \ I ( x ), 但a d 0.
若要使 bi aiT x t , T ai d bi aiT x T t min T i I \ I ( x ), ai d ai d
由定理13.1.1知, 当(13.2)的解d 0时, x不是KKT点, 我们 需计算新的可行点 : x x td D 其中t由线性搜索产生的步长
2.线性搜索—计算步长
为确保 x x td D 关于t的计算, 我们考虑三种情形 :
情形1 :i I ( x )及 j E ,
min s.t. f ( x ) T d aiT d 0, i I ( x ) aT j d 0, j E || d || 1
(13.2)
确保目标函数有界
约束 || d || 1也可写成如 || d || 1等其它有界形式
设(13.2)的最优解为d , 则f ( x ) d 0.
最优化:可行方向法38页PPT
最优化:可行方向法
46、法律有权打破平静。—马·格林 47、在一千磅法律里,没有一盎司仁 爱。— —英国
48、法律一多,公正就少。——托·富 勒 49、犯罪总是以惩罚相补偿;只有处 罚才能 使犯罪 得到偿 还。— —达雷 尔
50、弱者比强者更能得到法律的保护 。—— 威·厄尔
46、我们若已接受最坏的,就再没有什么损失。——卡耐基 47、书到用时方恨少、事非经过不知难。——陆游 48、书籍把我们引入最美好的社会,使我们认识各个时代的伟大智者。——史美尔斯 49、熟读唐诗三百首,不会作诗也会吟。——孙洙 50、谁和我一样用功,谁就会和我一样成功。——莫扎特
最优化方法 第三章(可行方向法)

gi ( x k )T d * * 0 ,
又 f ( x k )T d * * 0,
d * 是可行下降方向。
改进方法具有全局收敛性。
一、Zoutendijk法
Frank Wolfe 方法 min f ( x )
给定线性规划问题
Ax b s .t . x0
f ( x k )T d k 0 gi ( x k )T d k 0 , i I ( x k )
1 di 1, i 1, 2,
,n
������ = 0 , 则 ������ ������ 处不存在可行下降方向 , ������ ������ 已是 ������−������ 点. 有例子表明上述方法不一定收敛到 ������−������ 点,即总有������ < 0 .
如果可行点为内点, 可取������ = −������������(������ )计算。
一、Zoutendijk法 非线性约束模型的可行方向确定方法
min s.t.
z f ( x )T d z 0 gi ( x) d z 0, i I
T
一、Zoutendijk法 线性约束模型的可行方向
min f ( x ) Ax b s .t . Cx e
紧约束
A1 b1 定理 设 x D ,在点 x 处有 A1 x b1 , A2 x b2 , 其中A , b , A2 b2 则非零向量 d 是 x 处的可行方向的充分必要条件是
定理 设 f ( x )可微, x k D, 如果y k 是上述线性规划的最优解,则有
(1) 当f ( x k )T ( y k x k ) 0时 , 则x k 是(1)的K -T点;
又 f ( x k )T d * * 0,
d * 是可行下降方向。
改进方法具有全局收敛性。
一、Zoutendijk法
Frank Wolfe 方法 min f ( x )
给定线性规划问题
Ax b s .t . x0
f ( x k )T d k 0 gi ( x k )T d k 0 , i I ( x k )
1 di 1, i 1, 2,
,n
������ = 0 , 则 ������ ������ 处不存在可行下降方向 , ������ ������ 已是 ������−������ 点. 有例子表明上述方法不一定收敛到 ������−������ 点,即总有������ < 0 .
如果可行点为内点, 可取������ = −������������(������ )计算。
一、Zoutendijk法 非线性约束模型的可行方向确定方法
min s.t.
z f ( x )T d z 0 gi ( x) d z 0, i I
T
一、Zoutendijk法 线性约束模型的可行方向
min f ( x ) Ax b s .t . Cx e
紧约束
A1 b1 定理 设 x D ,在点 x 处有 A1 x b1 , A2 x b2 , 其中A , b , A2 b2 则非零向量 d 是 x 处的可行方向的充分必要条件是
定理 设 f ( x )可微, x k D, 如果y k 是上述线性规划的最优解,则有
(1) 当f ( x k )T ( y k x k ) 0时 , 则x k 是(1)的K -T点;
可行方向法 最优化理论与方法 教学PPT课件

定理
设非线性规划问题
s.t.
Ax b 的最优解存在,
x
0
且对算法产生的点列{xk } ,线性规划问题
min f (xk )T x
Ax b
s.t.
x
0
的最优解总存在。则
1) 若迭代到某步 k0 ,有 f (xk0 )T ( yk0 xk0 ) 0 , 则 xk0 为原问题的 K-T 点;
自动化学院 CISIA
一、算法基本思想
Rosen 的梯度投影法的基本思想是将无约束的 最速下降算法推广到有约束情形。
1) 若当前迭代点 xk 位于约束域内部,此时负梯度
方向为可行下降方向;
2) 若 xk 位于约束域边界上,此时将负梯度方向向可
行域内部投影,以保证方向是可行下降方向。
二、投影矩阵的基本概念
3)若 f (xk )T ( yk xk ) ,Stop, x* xk ;否则 转 4)。 4)进行一维搜索 min f (xk ( yk xk )) ,得最优步长因子 k ;
0 1
令 xk1 xk k ( yk xk ) , k : k 1,转 2)
四、算法收敛性定理
min f (x)
3.投影矩阵:设 P 为 n n 矩阵, 若 PT P, 且 PP P ,则称 P 为投影矩阵
4.投影矩阵性质
设 P 为 n n 矩阵 1)若 P 为投影矩阵,则 P 0 2) P 为投影矩阵 I P 为投影矩阵 3)若 P 为投影矩阵, Q I P ,则
L Px x Rn 和 L Qx x Rn 是互补的正交子空间,
Cx d
A m n,C P n,b Rm, d RP
x D, 作分解
A
A1 A2
最优化:可行方向法

若情形3 不存在, 自然令 t max 然后我们通过求解 min f ( x td )
0t tmax
来计算步长 t. 在上面分析的基础上, 我们得到如下的可行方向法 :
算法13.1 (Zoutendij k算法) 步0 : 选取初始点x0 D, 精度 0.令k : 0; 步2:求解下列关于 d 的线性规划问题 min s.t. f ( xk ) T d aiT d 0, i I ( xk ) aT j d 0, j E || d || 1 得解d k 步3 : 若 | f ( x k ) T d k | , 则得解xk , STOP. 否则转下一步. 步4:由(13.3) 计算t max , 其中x x k , d d k . 求解
考虑到(1)和(2), 我们先介绍线性约束问题的可行 方向法, 然后将其适当推广到非线性约束问题.
第一节 Zoutendijk 算法
一. 线性约束情形
考虑线性约束问题 min f ( x) s.t. g i ( x ) aiT x bi 0, i I h j ( x) a T j x b j 0, j E 记可行域 D {x | g i ( x ) 0, i I ; h j ( x ) 0, j E } x D, 在x处的有效集为 A( x ) I ( x ) E {i | g i ( x ) 0, i I } E (.)
1、下降可行方向
由于(13.1)的约束是线性的, x D, 在x处的可行方向集 S ( x ) {d R n | aiT d 0, i I ( x ); a T j d 0, j E} 而在x处的目标函数的下降方向满足: f ( x ) T d 0 因此, 在x处, 我们通过求解下列线性规划问题来计算下 降可行方向 :
1Zoutendijk可行方向法-PPT课件
Zoutendijk可行方向法
线性约束情形 举例 参见P243 例9.1.1 非线性约束情形
Zoutendijk可行方向法
非线性约束情形 基本原理 (1) 利用起作用约束构造可行下降方向
定理1.2.3 定理3.3.2
点 x 处的可行下 降方向d 满足:
线性规划问题
(9.1.22)
结论
Zoutendijk可行方向法
第四部分 约束最优化问题的解法
第九章 可行方向法 第十章 罚函数法和广义乘子法
第四部分 约束最优化问题的解法
可行方向法:在可行域内寻找使目标函数下降的 点列. 罚函数法: 利用原问题的目标函数和约束条件构造 新的目标函数--罚函数, 把约束最优化问题转化为 相应的罚函数的无约束最优化问题来求解.
非线性约束情形 基本原理 (1) 利用起作用约束构造可行下降方向
(2) 确定一维搜索步长
非线性约束情形 Step1 Step2 Step3
算法步骤 束
Step4
Step5
Zoutendijk可行方向法
非线性约束情形 算法特点
计算实践和理论分析表明,该算法可能失效或出现锯齿现象, 使算法收敛很慢甚至不收敛到最优点或K—T点.
Zoutendijk法的改进 问题的提出
对于线性和非线性不等式约束问题,前面我们仅使用起作用约 束来确定搜索方向.当某迭代点在一个约束的边界上时,如果可 行方向取得不恰当,那么沿该方向可能因接近另一个约束边界而 只能作一个微小的移动,否则,就会使迭代点跑出边界.为防止 这一现象发生,设想在约束条件的边界上设立一道“安全带”, 迭代点进入“安全带”时,只允许它往可行域内部移动,而不许 向边界靠近.为此引入 ε起作用约束的概念,即在构造可行方向时, 既把通过当前迭代点的约束边界看作起作用约束,也把充分家近 当前这代点的边界约束考虑在内.
最优化理论与算法 第12章 可行方向法

怎样确定k ?k的取值原则有两点: 第一,保持迭代点x(k) kd (k)的可行性;
第二,使目标函数值尽可能减小。
根据上述原则,可以通过求解下列一维搜索问题来确
定步长:
min f (x(k) d k )
s.t. A(x(k) d k ) b
E(x(k) d k ) e
(12.1.15)
0
2020/12/20
最优化理论
2
Ch12 可行方向法
1 Zoutendijk可行方向法 2 Rosen梯度投影法 3 Frank-Wolfe法 4 既约梯度法
2020/12/20
最优化理论
3
1. Zoutendijk可行方向法
2.1 线性约束情形
考虑NLP问题 min f (x)
s.t Ax b (12.1.1) Ex e
(12.1.7)
2020/12/20
最优化理论
7
1. Zoutendijk可行方向法
(12.1.6)和(12.1.7)即
A(xˆ d ) b (12.1.8)
又由Ed 0及Exˆ e可知
E(xˆ d ) e (12.1.9)
由上可知,xˆ d是可行点.因此d是xˆ处的可行方向.
于是,如果非零向量d同时满足 f (xˆ)T d 0, A1d 0, Ed 0
2020/12/20
最优化理论
9
1. Zoutendijk可行方向法
Th12.1.2考虑问题(12.1.1),设x是可行解,在点x处有
A1x b1, A2x b2,其中
A
A1 A2
,
b
b1 b2
则x为KKT点的充要条件是问题(12.1.10)的目标函数
最优化可行方向法

最优化可行方向法
最优化可行方向法(Optimal Feasible Direction Method)是一种优化技术,它主要用于解决有约束条件的线性优化问题,在互联网行业应用较为广泛。
基本思想是通过比较和判断,从当前的可行解中确定国家愿望最大的那个方向。
算法的核心步骤是先设定一个初始计算点,然后确定可行区域的边界矢量,根据给定的目标函数最大化,确定一个最优化可行方向。
在这个方向上的移动调整计算决策,直至收敛。
最优化可行方向法是用来解决线性规划问题的理想工具,它能够很好地去处理
复杂的约束条件优化。
此外,这种方法具有计算简便、容易操作等优点,在求解线性规划问题上能够提高计算效率。
由于最优化可行方向法具有这些优点,在现代电子商务中有广泛应用。
比如,
亚马逊等购物平台使用这种优化方法,进行订单路径规划或仓库调度安排,以时间和金钱效率兼顾的的最佳效果完成任务;同时,在搜索引擎市场中,最优化可行方向法也在提高搜索引擎的内部计算精度上发挥着重要作用。
总的来说,最优化可行方向法在互联网行业是一种重要的优化算法,可以有效
地解决复杂的约束优化问题,并且广泛应用于实际项目中,为多种类型的行业和企业增加效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
唯楚有材 於斯为盛
最优化
主讲:刘陶文
学好最优化,走遍天下都不怕
课件制作:刘陶文
1
第十三章 约束问题算法(II) —— 可行方向法
一、Zoutendijk可行方向法 二、投影梯度法 三、既约梯度法
2
思想 构造可行点序列{xk }使得目标函数序
列{ f (xk )}单调下降, 且xk KKT点
其过程如下: 给定可行点 xk , (1) 计算下降可行方向dk ;
(2) 通过线性搜索 (受可行性限制) 计算步长k , 产生新的可行点:xk1 xk k dk
考虑到(1)和(2), 我们先介绍线性约束问题的可行 方向法, 然后将其适当推广到非线性约束问题. 3
第一节 Zoutendijk 算法
一. 线性约束情形
考虑线性约束问题
min s.t.
记可行域
f (x)
定理13.1.1 设x D, d是线性规划问题(13.2)的解, 则 (1) 若f (x)T d 0,即d 0, 则x是问题(13.1)的KKT点; (2) 若f (x)T d 0,即f (x)T d 0, 则d是函数f在可行
点x处的一个下降可行方向.
由定理13.1.1知,当(13.2)的解d 0时, x不是KKT点, 我们 需计算新的可行点 :
(13.2)
a
T j
d
0,
jE
|| d || 1 确保目标函数有界
约束 || d || 1也可写成如|| d || 1等其它有界形式 5
设(13.2)的最优解为d , 则f (x)T d 0.
min f (x)T d
s.t. aiT d 0, i I (x)
a
T j
d
0,
jE
情形1:f (x)T d 0, 则d 0,
由于(13.1)的约束是线性的, x D, 在x处的可行方向集
S( x)
{d
Rn
|
aiT d
0, i
I
(
x
);
a
T j
d
0,
j
E}
而在x处的目标函数的下降方向满足:
f (x)T d 0 因此, 在x处, 我们通过求解下列线性规划问题来计算下
降可行方向 :
min f (x)T d
s.t. aiT d 0, i I (x)
min
0t tmax
f (xk
tdk )
得步长tk . 令xk1 xk tk dk . 令k : k 1, 转步1.
11
例13.1 用Zoutendijk 算法求解下列约束问题: min f ( x) x x x x s.t. g(x) x x g( x) x x g( x) x g(x) x
x x td D 其中t由线性搜索产生的步长
7
2.线性搜索—计算步长
为确保
x x td D 关于t的计算, 我们考虑三种情形 :
情形1:i I (x)及 j E,
由于 aiT d 0, i I (x)
a
T j
d
0, j E
对任意的t 0, 我们有
aiT ( x td) aiT x taiT d bi , i I ( x)
则当t [0, tmax ]时, 总有 x x td D
若情形3 不存在,自然令
tmax 然后我们通过求解
(.)
min f (x td)
0t tmax
来计算步长 t. 在上面分析的基础上,我们得到如下的可行方向法 : 10
算法13.1 (Zoutendij k算法)
步0:选取初始点x0 D, 精度 0.令k : 0;
a
T j
(x
td)
a
T j
x
taTj d
bj 0, j E
8
情形2:i I \ I (x), 但aiT d 0
显然, 对任意的t 0, 我们有
aiT (x td) aiT x taiT d bi , i I \ I (x)
情形3:i I \ I (x), 但aiT d 0.
若要使
取初始点x() (, )T
解:f
(
x
)
x x
,
a
,
a
,
0
a , a
12
第一次迭代:
f
(
x(
)
)
,
I ( x() ) { , }
解子问题:
min
s.t.
d d d d
d d
得解d ()
1
aT d (0) , b aT x(0) ; aT d (0) , b aT x() 2
s.t.
2d 2d d d d d d
gi ( x) aiT x bi 0, i I
hj (x)
a
T j
x
bj
0,
jE
(.)
D {x | gi (x) 0, i I ; h j (x) 0, j E } x D, 在x处的有效集为
A(x) I (x) E {i | gi (x) 0, i I} E
4
1、下降可行方向
则 从而
aiT ( x td ) aiT x taiT d bi ,
t
bi
aiT aiT d
x
,
t
min
bi
aiT aiT d
x
Байду номын сангаас
i
I
\
I ( x), aiT d
9
综上所述,步长t 的计算完全由情形3决定, 为此, 我们令
tmax
min
bi
aiT aiT d
x
i
I
\
I (x),
aiT d
tmax
min
1 1
,
2 2
1
计算步长t : 求解问题
min
t
f ( x() td (0) ) t t
解得 t , 所以 x() x() td () (, )T
13
第二次迭代:f ( x(1) ) (, )T , I ( x(1) ) {1, 2}
解子问题:
min
步2:求解下列关于 d 的线性规划问题
min f ( xk )T d
s.t. aiT d 0, i I ( xk )
a
T j
d
0,
jE
|| d || 1
得解d k
步3:若 | f (xk )T dk | , 则得解xk , STOP. 否则转下一步.
步4:由(13.3)计算tmax , 其中x xk , d dk . 求解
|| d || 1
显然, d是f在x处的一个下降可行方向;
(13.2)
情形2:f (x)T d 0, 则d 0, 这说明在x处不存在下降 可行方向, 即线性系统:
f (x)T d 0
aiT d 0, i I (x) 无非零解
a
T j
d
0,
jE
x是问题(13.1) 的KKT点
6
由上面的分析, 我们有下列结论:
最优化
主讲:刘陶文
学好最优化,走遍天下都不怕
课件制作:刘陶文
1
第十三章 约束问题算法(II) —— 可行方向法
一、Zoutendijk可行方向法 二、投影梯度法 三、既约梯度法
2
思想 构造可行点序列{xk }使得目标函数序
列{ f (xk )}单调下降, 且xk KKT点
其过程如下: 给定可行点 xk , (1) 计算下降可行方向dk ;
(2) 通过线性搜索 (受可行性限制) 计算步长k , 产生新的可行点:xk1 xk k dk
考虑到(1)和(2), 我们先介绍线性约束问题的可行 方向法, 然后将其适当推广到非线性约束问题. 3
第一节 Zoutendijk 算法
一. 线性约束情形
考虑线性约束问题
min s.t.
记可行域
f (x)
定理13.1.1 设x D, d是线性规划问题(13.2)的解, 则 (1) 若f (x)T d 0,即d 0, 则x是问题(13.1)的KKT点; (2) 若f (x)T d 0,即f (x)T d 0, 则d是函数f在可行
点x处的一个下降可行方向.
由定理13.1.1知,当(13.2)的解d 0时, x不是KKT点, 我们 需计算新的可行点 :
(13.2)
a
T j
d
0,
jE
|| d || 1 确保目标函数有界
约束 || d || 1也可写成如|| d || 1等其它有界形式 5
设(13.2)的最优解为d , 则f (x)T d 0.
min f (x)T d
s.t. aiT d 0, i I (x)
a
T j
d
0,
jE
情形1:f (x)T d 0, 则d 0,
由于(13.1)的约束是线性的, x D, 在x处的可行方向集
S( x)
{d
Rn
|
aiT d
0, i
I
(
x
);
a
T j
d
0,
j
E}
而在x处的目标函数的下降方向满足:
f (x)T d 0 因此, 在x处, 我们通过求解下列线性规划问题来计算下
降可行方向 :
min f (x)T d
s.t. aiT d 0, i I (x)
min
0t tmax
f (xk
tdk )
得步长tk . 令xk1 xk tk dk . 令k : k 1, 转步1.
11
例13.1 用Zoutendijk 算法求解下列约束问题: min f ( x) x x x x s.t. g(x) x x g( x) x x g( x) x g(x) x
x x td D 其中t由线性搜索产生的步长
7
2.线性搜索—计算步长
为确保
x x td D 关于t的计算, 我们考虑三种情形 :
情形1:i I (x)及 j E,
由于 aiT d 0, i I (x)
a
T j
d
0, j E
对任意的t 0, 我们有
aiT ( x td) aiT x taiT d bi , i I ( x)
则当t [0, tmax ]时, 总有 x x td D
若情形3 不存在,自然令
tmax 然后我们通过求解
(.)
min f (x td)
0t tmax
来计算步长 t. 在上面分析的基础上,我们得到如下的可行方向法 : 10
算法13.1 (Zoutendij k算法)
步0:选取初始点x0 D, 精度 0.令k : 0;
a
T j
(x
td)
a
T j
x
taTj d
bj 0, j E
8
情形2:i I \ I (x), 但aiT d 0
显然, 对任意的t 0, 我们有
aiT (x td) aiT x taiT d bi , i I \ I (x)
情形3:i I \ I (x), 但aiT d 0.
若要使
取初始点x() (, )T
解:f
(
x
)
x x
,
a
,
a
,
0
a , a
12
第一次迭代:
f
(
x(
)
)
,
I ( x() ) { , }
解子问题:
min
s.t.
d d d d
d d
得解d ()
1
aT d (0) , b aT x(0) ; aT d (0) , b aT x() 2
s.t.
2d 2d d d d d d
gi ( x) aiT x bi 0, i I
hj (x)
a
T j
x
bj
0,
jE
(.)
D {x | gi (x) 0, i I ; h j (x) 0, j E } x D, 在x处的有效集为
A(x) I (x) E {i | gi (x) 0, i I} E
4
1、下降可行方向
则 从而
aiT ( x td ) aiT x taiT d bi ,
t
bi
aiT aiT d
x
,
t
min
bi
aiT aiT d
x
Байду номын сангаас
i
I
\
I ( x), aiT d
9
综上所述,步长t 的计算完全由情形3决定, 为此, 我们令
tmax
min
bi
aiT aiT d
x
i
I
\
I (x),
aiT d
tmax
min
1 1
,
2 2
1
计算步长t : 求解问题
min
t
f ( x() td (0) ) t t
解得 t , 所以 x() x() td () (, )T
13
第二次迭代:f ( x(1) ) (, )T , I ( x(1) ) {1, 2}
解子问题:
min
步2:求解下列关于 d 的线性规划问题
min f ( xk )T d
s.t. aiT d 0, i I ( xk )
a
T j
d
0,
jE
|| d || 1
得解d k
步3:若 | f (xk )T dk | , 则得解xk , STOP. 否则转下一步.
步4:由(13.3)计算tmax , 其中x xk , d dk . 求解
|| d || 1
显然, d是f在x处的一个下降可行方向;
(13.2)
情形2:f (x)T d 0, 则d 0, 这说明在x处不存在下降 可行方向, 即线性系统:
f (x)T d 0
aiT d 0, i I (x) 无非零解
a
T j
d
0,
jE
x是问题(13.1) 的KKT点
6
由上面的分析, 我们有下列结论: