现代控制理论第一章01
现代控制理论状态空间法
根据系统微分方程建立状态空间表达式.
1.输入项中不含输入导数项的线性系统空间状态 表达式
• 系统描述为:
y (n ) a1 y (n1) an1 y an y u
(1)
讨论:状态如何选择
y(t) C (t)x(t) D(t)u(t)
2)线性时不变系统: x Ax Bu y Cx Du
在通常情况下,大多数还是研究线性时不变 系 统,即线性定常系统,因此本课程的主要研究对 象是线性定常系统。
4.状态空间描述的结构图(或称状态变量图)
• 例:根据上例画出结构图. • 解:先将例子写成下述形式
现代控制理论
第一章 状态空间法
控制系统的状态空间描述
一.问题的引出 1 --古典控制理论的局限性 1、仅适用于SISO的线性定常系统(外部描述,
时不变系统) 2、古典控制理论本质上是复频域的方法.(理论) 3、设计是建立在试探的基础上的.(应用) 4、系统在初始条件为零,或初始松驰条件下,才
能采用传递函数.
定义2.状态变量
状态变量是确定系统状态的最小一组变量,如果以最
少的n个变量 x1 (t ), x2 (t ), , xn (t ) 可以完全描述系
统的行为 (即当t≥ 时输入和
t0
在t= t0初始状态给定后,系统的状态完全可以确定),那 么
x1 (t ), x2 (t ), 是一, xn组(t )状态变量.
(2)状态变量选取不唯一,有时选取状态变量仅为数 学描述所需,而非明确的物理意义。
(3)状态变量是系统的内部变量,一般情况下输出是 状态的函数,但输出总是希望可量测的。
(4)仅讨论有限个状态变量的系统。 (5)有限个数的状态变量的集合,称为状态向量。 (6)状态向量的取值空间称为状态空间。
现代控制理论知识点汇总
现代控制理论知识点汇总Revised at 2 pm on December 25, 2020.第一章 控制系统的状态空间表达式1. 状态空间表达式 n 阶DuCx y Bu Ax x+=+= 1:⨯r u 1:⨯m y n n A ⨯: r n B ⨯: n m C ⨯:r m D ⨯:A 称为系统矩阵,描述系统内部状态之间的联系;B为输入(或控制)矩阵,表示输入对每个状态变量的作用情况;C 输出矩阵,表示输出与每个状态变量间的组成关系,D直接传递矩阵,表示输入对输出的直接传递关系。
2. 状态空间描述的特点①考虑了“输入-状态-输出”这一过程,它揭示了问题的本质,即输入引起了状态的变化,而状态决定了输出。
②状态方程和输出方程都是运动方程。
③状态变量个数等于系统包含的独立贮能元件的个数,n 阶系统有n 个状态变量可以选择。
④状态变量的选择不唯一。
⑤从便于控制系统的构成来说,把状态变量选为可测量或可观察的量更为合适。
⑥建立状态空间描述的步骤:a 选择状态变量;b 列写微分方程并化为状态变量的一阶微分方程组;c 将一阶微分方程组化为向量矩阵形式,即为状态空间描述。
⑦状态空间分析法是时域内的一种矩阵运算方法,特别适合于用计算机计算。
3. 模拟结构图(积分器 加法器 比例器)已知状态空间描述,绘制模拟结构图的步骤:积分器的数目应等于状态变量数,将他们画在适当的位置,每个积分器的输出表示相应的某个状态变量,然后根据状态空间表达式画出相应的加法器和比例器,最后用箭头将这些元件连接起来。
4. 状态空间表达式的建立① 由系统框图建立状态空间表达式:a 将各个环节(放大、积分、惯性等)变成相应的模拟结构图;b 每个积分器的输出选作i x ,输入则为i x;c 由模拟图写出状态方程和输出方程。
② 由系统的机理出发建立状态空间表达式:如电路系统。
通常选电容上的电压和电感上的电流作为状态变量。
利用KVL 和KCL 列微分方程,整理。
现代控制理论第一章01
态系统的输出取决于系统当前及过去的输入信息的 影响的叠加
如,电阻的电流直接等于当前的电压输入与电阻值
之比,而电容两端的电压是通过电容的当前及过去 的电流的积分值与电容值之比
• 在进行动态系统的分析和综合时,首先应建立该 系统的数学模型
在系统和控制科学领域内,数学模型是指能描述动态 系统的动态特性的数学表达式,
du C (t ) 1 i (t ) dt C
该方程描述了电路的状态变量 和输入量之间的关系,称为该 电路的状态方程,这是一个矩 阵微分方程。
i(t ) uC (t ) 0 1 u ( t ) C
如果将电容上的电压作为电路的输出量,则 该方程是联系输出量和状态变量关系的方程, 称为该电路的输出方程或观测方程。这是一 个矩阵代数方程。
1 f 1 ( x1 , x 2 , , x n , u1 , u 2 , , u r , t ) x x 2 f 2 ( x1 , x 2 , , x n , u1 , u 2 , , u r , t ) (t ) f ( x(t ), u (t ), t ) x x n f n ( x1 , x 2 , , x n , u1 , u 2 , , u r , t )
对前面引入的状态空间模型的意义,有如下讨论:
状态方程描述的是系统动态特性, 其决定系统状态变量的动态变化。 输出方程描述的是输出与系统内部的状态变量的关系。 系统矩阵A表示系统内部各状态变量之间的关联情况, 它主要决定系统的动态特性。 输入矩阵B又称为控制矩阵, 它表示输入对状态变量变化的影响。 输出矩阵C反映状态变量与输出间的作用关系。 直接传输矩阵D则表示了输入对输出的直接影响,许多系统 不存在这种直联关系,即矩阵D=0。
现代控制理论(刘豹)第一章
状态变量
状态向量
状态空间
状态方程
状态:表征 系统运动的信 息和行为 状态变量: 能完全表示系 统运动状态的 最小个数的一 组变量
由状态变量 构成的向量 x1(t) x2(t) : xn(t)
以各状态变量 x1(t),x2(t),…… xn(t)为坐标轴 组成的几维空 间。
S nY ( s ) + an −1S n −1Y ( s ) + ... + a0Y ( s ) = bm S mu ( s ) + ... + b0Y ( s )
(bm S m + bm −1S m −1 + ... + b0 ) Y ( s ) Z ( s ) G ( s) = Y ( s) / U ( s) = = ⋅ n n −1 ( S + an −1S + ... + a0 ) Z ( s) U ( s)
& x3 x3
x2 x1
机电工程系
∫
∫
∫
习题2 习题
已知离散系统的差分方程为
y (k + 2) + 3 y (k + 1) + 2 y (k ) = 2u (k + 1) + 3u (k )
试求系统的状态空间表达式,并画出其模拟结构图。
解:假设初始条件为零,系统微分方程的 Z 变换为:
z 2Y ( z ) + 3 zY ( z ) + 2Y ( z ) = 2sU ( z ) + 3U ( z )
S n Z ( s ) + an −1S n −1Z ( s ) + ... + a0 Z ( s ) = U ( s ) Y ( s ) = bn −1S
现代控制理论
第一章 绪 论
(2) 以MIMO线性、非线性、时变与非时变系 统为主要研究对象。 (3) 以线性代数和微分方程为工具,以状态
空间法为基础。
1.1.3 上世纪80年代以来出现了新的控制思想
和控制理论
(1) 多变量频率域控制理论。
(2) 模糊控制理论。
第一章 绪 论
1.2 现代控制理论的主要内容
⑶ 以拉氏变换为工具,以传递函数为基础在
频率域中分析与设计。
⑷ 经典控制理论的局限性
① 难以有效地应用于时变系统、多变量系统
② 难以有效地应用于非线性系统。
1.1.2 现代控制理论
⑴ 现代控制理论的形成和发展
第一章 绪 论 ① 在20世纪50年代形成
动态规划法
极大值原理
卡尔曼滤波 ② 上世纪60年代末至80年代迅速发展。 非线性系统 大系统 智能系统
第一章 绪 论
钱学森
钱学森,男,汉族,浙江省杭州市 人。中国共产党优秀党员、忠诚的共 产主义战士、享誉海内外的杰出科学 家和中国航天事业的奠基人,中国两 弹一星功勋奖章获得者之一。曾任美 国麻省理工学院教授、加州理工学院 教授,曾担任中国人民政治协商会议 第六、七、八届全国委员会副主席、 中国科学技术协会名誉主席、全国政 协副主席等重要职务。
第一章 绪 论
贝尔曼
美国数学家,美国全国科学院院士, 动态规划的创始人。1920年8月26 日生于美国纽约。1984年3月19日 逝世。1941年在布鲁克林学院毕业, 获理学士学位,1943年在威斯康星 大学获理学硕士学位,1946年在普 林斯顿大学获博士学位。1946~ 1948年在普林斯顿大学任助理教 授,1948~1952年在斯坦福大学任 副教授,1953~1956年在美国兰德 公司任研究员,1956年后在南加利 福尼亚大学任数学教授、电气工程 教授和医学教授。
现代控制理论-第1章
i,得到二阶微分方程为:
(5) 其相应的传递函数为:
(6) 回到式(5)或式(6)的二阶系统,若改选 和 作为两个状态变量,
即令
则一阶微分方程为:
(7)
关于状态变量的选取: 理论上,不要求物理上一定可测; 工程上,以选取易测的量为宜,因为有时需要反馈状态变量。
简记为:
设系统2为:
简记为:
1.并联连接
所谓并联连接,是指各子系统在相同输入下,组合系统的输出是各子系
统输出的代数和,结构简图如下图所示。
由式(72)和式(73),并考虑 间表达式:
得系统的状态空
从而系统的传递函数阵为:
故子系统并联时,系统传递函数阵等于子系统传递函数阵的代数和。
2.串联连接
串联连接下如图所示。读者可自己证明,其串联连接传递函数阵为:
其中各元素
都是标量函数,它表征第 个输入对第 个输出的传递关系。
当
时 ,意味着不同标号的插入与输出有相互关联,称为有耦合关系,
这正是多变量系统的特点。
式(69)还可以表示为:
可以看出,
的分母,就是系统矩阵A的特征多项式,
的分子是
一个多项式矩阵。
应当指出,同一系统,尽管其状态空间表达式可以作各种非奇异变换而
(66) 式中, 为r×1输入列矢量; 为m×1输出列矢量;B为n×r控制矩阵;
C为m×n输出矩阵;D为m×r直接传递阵;X,A为同单变量系统。
同前,对式(66)作拉氏变换并认为初始条件为零,得:
(67)
故
间的传递函数为
(68)
它是一个 n×r 矩阵函数。 故 间的传递函数为: (69) 它是一个m×r矩阵函数,即
《现代控制理论》刘豹著(第3版)课后习题答案(最完整版)
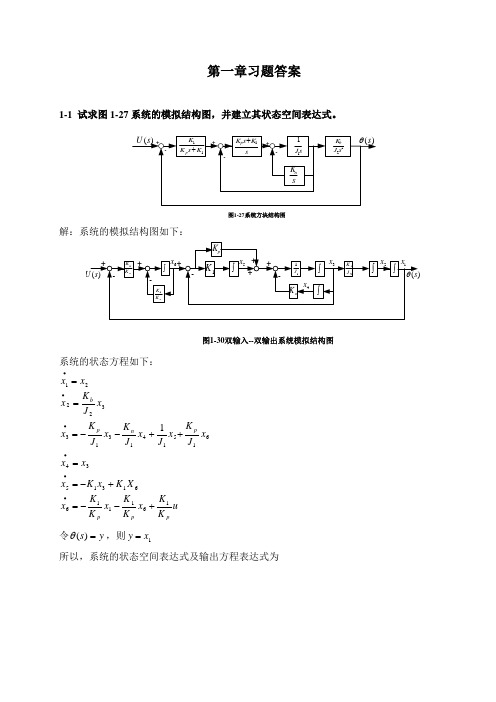
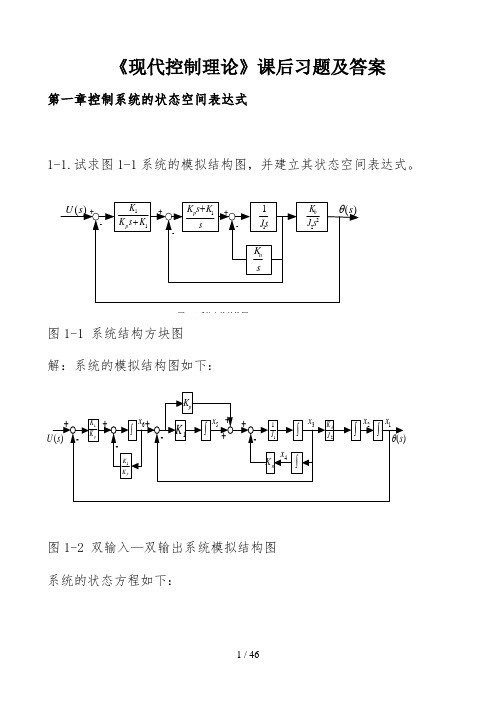
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:uKK x KK x KK x X K x K x x x x J Kx J x J K x J Kx x J K x x x ppppn pb 1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙65432116543211111111265432100000100000000000000010010000000000010x x x x x x y uK K x x x xx x K K K K K K J K J J K J KJ K x x x x x xp p pp n pb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x Cx Cx x L x L R x uL x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000010111010x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论(1-8讲第1-2章知识点)精品PPT课件
dia dt
Ke
I fD Coபைடு நூலகம்st
n f Const
nDJ , f
其中:Kf 为发电机增益常数;Ke 为电动机反电势常数。
(3).电动机力矩平衡方程:J
d
dt
f
Kmia
(Km
-电动机转矩常数)
以上三式可改写为:
d
dt
f J
Km J
ia
dia dt
Ke Ra
La
La
ia
Kf La
if
试写出其状态空间表达式。
解:选择相变量为系统的状态变量,有
•
•
•• •
x1 y x2 y x1 x3 y x2
故
即
•
x1 x2
•
x2 x3
•
x3
a0 a3
x1
a1 a3
x2
a2 a3
x3
1 a3
u
•
0
x 0
a0
a3
1 0 a1 a3
0
0
1 x 0 u
a2
1
a3 a3
a1 y a0 y
bnu (n)
b u (n1) n 1
b0u
(1)
分为两种情况讨论。
一、输入信号不含有导数项:
此时系统的运动方程为:
•
y(n)
a y(n1) n1
a1 y a0 y b u
故选
x1 y
•
x2 y
..
xn1
y(n2)
xn y(n1)
对左边各式求导一次,即有
18
24
2-3 化系统的频域描述为状态空间描述
现代控制理论章节习题含答案(大学期末复习资料)
《现代控制理论》第一章习题解答1.1线性定常系统和线性时变系统的区别何在?答:线性系统的状态空间模型为:x = AxBu+y CxDu= +线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A,B,C和中的各分量均为常数,而对线性时变系统,其系数矩阵D A,B,C和D中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别?答: 传递函数模型与状态空间模型的主要区别如下:1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于n 阶传递函数G s( )= b s n−s1nn+−1a s+n−b s1n−n2−1n+−2 + +as a+1 bs b+1 +0 0+d ,分别有⎧⎡0 1 0 0 ⎤⎡⎤0⎪⎢0 0 1 0 ⎥⎥⎢⎥⎢⎥0⎪⎢⎪⎪x =⎢ ⎥x+⎢⎥ u ⑴能控标准型:⎨⎢0 0 0 1 ⎥⎥⎢⎥⎢⎥0⎪⎢⎪⎣⎢−a0 −a1 −a2 −a n−1⎥⎦⎢⎥⎣⎦1⎪⎪⎩y=[b0 b1 b n−2 b n−1]x du+⎧⎡0 0 0 −a0 ⎤⎡b0 ⎤⎪⎪⎢⎢1 0 0 −a1 ⎥⎥⎢⎢b1 ⎥⎥⎪⎪x =⎢0 1 0 −a2 ⎥⎥x+⎢⎢ ⎥⎥u⑵能观标准型:⎨⎢b n−2⎥⎪⎢ ⎥⎢⎪⎣⎢0 0 1 −a n−1⎦⎥⎢⎣b n−1⎥⎦⎪⎪⎩y=[0 0 0 1]x du+⎧⎡p1⎪⎢0⎪x =⎢⎢ 0 p20 0 ⎤⎡1⎤0 ⎥⎢1⎥⎥x+⎢⎥u ⎥⎢ ⎥⎪⑶对角线标准型:⎨⎪⎢⎣0⎪p n⎥⎦⎢⎣1⎥⎦⎪⎩y=[c1 c2 c x du n] + 式中的pp1, 2,, p n和c c1, 2,, c n可由下式给出,G s( )= b s n−s1nn−1a s+n−b s1n−n2−1n+−2 + +as a+1 bs b+1 +0 0 + =d s p−c1 1 + s p−c2 2 + + s p−c n n +d+能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1 外,其余全为0。
现代控制理论第一章-控制系统数学模型
y b0
b1
bn1
xn
注:如果输入项的导数阶次和输出项导数阶次相同,则有d。
Y (s) R(s)
bn s n an s n
b1s b0 a1s a0
d
bn1sn1 b1s b0 ansn a1s a0
例1-4 已知描述系统的微分方程为 y18y 192y 640y 160u 640u
y bn1z(n1) b1z b0 z b0 x1 b1x2 bn1xn
写成矩阵形式
x1
x2
xn
0
0
0
a0
1 0 0 a1
0 1 0 a2
0 0 0 a3
0
0
0 1 an1
x1 x2
xn
0 u 0
1
x1
第1章 控制系统数学模型
本课程的任务是系统分析和系统设计。而不论是系统分析还是系 统设计,本课程所研究的内容是基于系统的数学模型来进行的。因 此,本章首先介绍控制系统的数学模型。
本章内容为: 1、状态空间表达式 2、由微分方程求出系统状态空间表达式 3、传递函数矩阵 4、离散系统的数学模型 5、线性变换(状态变量选取非唯一)
写成矩阵形式
x1 0 1 0 x1 0
x2
0
0
1
x2
0
u
x3 a0 a1 a2 x3 b0
x1
y 1
0
0
x2
x3
状态图如下:
一般情况下,n 阶微分方程为: y(n) an1 y(n1) a1 y a0 y b0u
选择状态变量如下:
x1 y x1 x2 y x2 x3 y
0
x2
1 M
现代控制理论
x2 ⋯ xn ] 的所有可能值的集合叫状态空间 状态空间。或说由 x1 轴、 x2 轴、…、 xn 轴 状态空间
T
所组成的 n 维空间称为状态空间 状态空间。 状态空间 2、写出状态空间表达式 写出状态空间表达式的 状态空间表达式的一般形式。 一状态方程和输出方程 状态方程 输出方程。状态方程为一阶向量微分方程,输出方程是一个代 输出方程
0 ⋯ − an − 2 ⋯
系统实现的结构图如下图所示。
4
上图等效与下图:
1 0 0 0 0 1 x ⋮ ⋮ ɺ= ⋮ 此时系统状态空间表达式为: 0 0 0 − an − an −1 − an − 2 y = [b0 0 0 ⋯ ⋯
R1 R1 1 di1 dt = − L i1 + L i2 + L u 1 1 1 u R1 + R2 di2 R1 = i2 − i2 − c L2 L2 dt L2 duc 1 = i2 dt C
现在令 x1=i1,x2=i2,x3=uc,将上式写成矩阵形式即为状态方程。
x1 y = [ 0 1 0] x2 x3
【例】动态系统如下图所示,它包含有一个小车和一个倒置摆,因为用一个外力 u(t)保持摆直立不倒 的问题和手握摆杆维持平衡很相似,所以通常称之为自动搜索平衡车。为了简化,设车与摆只在一个平面 内运动,并且忽略杆的质量、电机本身的动态摩擦、风力等因素,但保留问题的实质。很显然,系统本来 是不稳定的,因为如果不加控制力,杆必然会倒下来。设小车和球的质量分别为 M 、 m,摆杆的长度和角位
第 1 章 控制系统的数学模型
1、解释状态变量、 解释状态变量、状态向量和状态空间。 状态向量和状态空间。
现代控制理论_第1章
现代控制理论 机械工程硕士研究生学位课
状态空间表达式
ɺ = Ax + bu x y = cx
x1 0 x 0 2 x = ⋮ , A = ⋮ xn −1 0 xn −a0 1 0 ⋮ 0 −a1 0 1 ⋮ ⋯ ⋯ ⋱ 0 0 0 0 ⋮ , b = ⋮ , c = [1 0 ⋯ 0] 1 0 −an −1 b0
现代控制理论 机械工程硕士研究生学位课
实现问题
实现问题:由描述系统输入-输出动态关系 的运动方程式或传递函数,建立系统的状态 空间表达式。 揭示系统的内部关系 讨论单输入单输出线性定常系统
ɺ = Ax + bu x y = cx + du
现代控制理论 机械工程硕士研究生学位课
两类实现问题
di 1 Ri + L + ∫ idt = u dt C
本例子中 1. 输入和输出都已 明确; 2. 选择两个独立的 储能元件作为状 态变量; 3. 根据电路的基本 定律列出方程
现代控制理论 机械工程硕士研究生学位课
1 y = uc = ∫ idt C
系统状态方程的建立
设状态变量为电感器电流和电容器电压,即
现代控制理论 Modern Control Theory
现代控制理论 机械工程硕士研究生学位课
本课程主要内容
系统描述:状态空间表示法 系统分析:状态方程的解、线性系统的能 控和能观测性、稳定性分析 系统设计:状态反馈和状态观测器 最优控制:最优控制系统及其解法
现代控制理论第一章(吴忠强版)

吴忠强
目
录
第一章 控制系统的状态空间表达式 第二章 控制系统状态空间表达式的解 第三章 线性控制系统的能控性与能观性 第四章 控制系统的李亚普诺夫稳定性 第五章 线性定常系统的综合 第六章 最优控制系统设计 参考文献
内容简介
•
本书系统的介绍了现代控制理论的 基本内容,包括控制系统的状态空间描 述、运动分析与离散化、李亚普诺夫稳 定性分析、能控性与能观性、状态反馈 与状态观测器、最优控制系统设计。每 章配有一定的例题和习题.
b11 b 21 B bn1
b12 b 22 bn 2
b1 r b2 r b nr
y1 y2 y ym
——m维输出矢量;
—— n r 输入(或控制)矩阵;
c 11 c 12 c 21 c 22 C c m1 c m 2
1
式(1-3)就是图1-1系统的输出方程,它的矩阵表示为
y 1
T
0
x1 x2
或
y C x
T
y c x
T
(1-4)
式中
c
1
0
六、状态空间表达式
l 状态方程和输出方程总合起来,构成对一个系统完整的动态 描述,称为系统的状态空间表达式, 在经典控制理论中,用指定某个输出量的高阶微分方程来描 述系统的动态过程。如图1-1所示的系统,在以 uc 作输出时, 从式(1-1)消去中间变量i ,得到二阶微分方程为
回到式(1-5)或式(1-6)的二阶系统,若改选 u C 和 u c 作为 两个状态变量,即令 x 1 u C ,
x2 uc
现代控制理论第1章L
第1章绪论1.1 控制系统的构成控制系统的组成和运行的普遍机制是控制论的反馈控制原理。
从信息处理和控制的角度看,控制系统可以看成由施控系统和被控系统两部分组成,并运行于一定的扰动和环境中,如图1–1所示。
施控系统产生控制作用,控制被控系统的物质流、能量流、信息流和资金流在规定的条件下以期望的或最优的方式运行。
扰动图1–1 控制系统的组成施控系统和被控系统的划分应根据实际应用情况定,由所考察的重点确定。
被控系统包括单台机械或设备、生产线、生产过程、以及整个工厂和企业等,它们是接受物质流、能量流、信息流和资金流的对象,也称控制对象。
施控系统应包括传感、控制和执行三部分。
传感是获得被控系统的状态、输出和环境等方面信息的各种手段之总和,包括测量物理变量的传感器,为获得某些不能用测量仪表测量的变量的软测量技术,以及多传感器信息融合技术等。
执行是产生施控系统最终输出信息的各种手段之总和,它可能是驱动部件(如调节阀、电动机、继电器等)、信息转换和通信部件(如与下级计算机的接口)、显示、记录以及图、文、声、多媒体输出部件等。
控制则以计算机为主体,完成控制问题的求解,形成控制算法和控制策略,产生控制规律,它是控制系统的核心。
抽象化后的控制系统结构如图1–2所示。
图1–2 控制系统结构当着重研究控制策略而不关心信息的获取以及控制输出的实现时,将传感简化为求差器,将控制、执行合称控制器,如图1–3所示。
控制策略(狭义也称控制算法)是控制器的核心,是控制理论研究的重点。
图1–3 简化的控制系统1.2 控制理论发展简况在工业应用和理论研究中,控制理论的发展过程大体上可分为三个阶段:经典控制理论、现代控制理论及智能控制理论。
这种阶段性的发展过程是由简单到复杂、由量变到质变的辩证发展过程,是现代科学技术迅速发展对自动控制的程度、精度、范围及其适应能力的需求越来越高,从而推动控制理论发展的结果。
理论来源于实践,反过来指导实践,控制理论的发展过程证明了这个真理。
现代控制理论课后习题及答案
《现代控制理论》课后习题及答案第一章控制系统的状态空间表达式1-1.试求图1-1系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图图1-1 系统结构方块图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图图1-2 双输入—双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2.有电路如图1-3所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图图1-3 电路图解:由图,令32211,,x u x i x i c===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
第一章-状态空间表达式

现代控制理论Model Control Theory前言1.胚胎萌芽期(1945年以前)•十八世纪以后,蒸汽机的使用提出了调速稳定等问题1765年俄国人波尔祖诺夫发明了锅炉水位调节器1784年英国人瓦特发明了调速器,蒸汽机离心式调速器1877年产生了劳斯稳定判据•十九世纪前半叶,动力使用了发电机、电动机促进了水利、水电站的遥控和程控的发展以及电压、电流的自动调节技术的发展•十九世纪末,二十世纪初,使用内燃机促进了飞机、汽车、船舶、机器制造业和石油工业的发展,产生了伺服控制和过程控制•二十世纪初第二次世界大战,军事工业发展很快飞机、雷达、火炮上的伺服机构,总结了自动调节技术及反馈放大器技术,搭起了经典控制理论的架子,但还没有形成学科。
2.经典控制理论时期(1940-1960)1945年美国贝尔实验室的Bode和Nyqusit提出频率响应法,奠定了控制理论的基础。
美国MIT的N. Wiener在研究随机过程的预测问题中,提出Wiener滤波理论.50年代趋于成熟.主要内容对单输入单输出系统进行分析,采用时域、频率法(频域)、根轨迹法(复数域)、相平面法、描述函数法;讨论系统稳定性的代数和几何判据以及校正网络等。
面临的挑战:被控对象日益复杂化、控制性能要求不断提高。
wiener3.现代控制理论时期(50年代末-60年代初)空间技术的发展提出了许多复杂控制问题,用于导弹、人造卫星和宇宙飞船上。
取得的成就1:1957年发射人造地球卫星;2:工业机器人产品;3:1961年载人航天;4:1969年登月;4.大系统和智能控制时期(70年代)各学科相互渗透,要分析的系统越来越大,越来越复杂。
例如:人工智能、模拟人的人脑功能、机器人等。
应用举例本课程内容•状态空间模型;•基于状态空间模型的系统分析(Analysis):运动分析、能控性、能观性、稳定性•基于状态空间模型的系统综合(Synthesis):极点配置、控制器设计、观测器设计、最优控制器设计。
(完整版)现代控制理论

(完整版)现代控制理论第⼀章线性离散系统第⼀节概述随着微电⼦技术,计算机技术和⽹络技术的发展,采样系统和数字控制系统得到⼴泛的应⽤。
通常把采样系统,数字控制系统统称为离散系统。
⼀、举例⾃动测温,控温系统图;加热⽓体图解:1. 当炉温h变化时,测温电阻R变化→R,电桥失去平衡状态,检流计指针发⽣偏转,其偏转⾓度为)e;(t2. 检流计是个⾼灵敏度的元件,为防磨损不允许有摩擦⼒。
当凸轮转动使指针),接触时间为τ秒;与电位器相接触(凸轮每转的时间为T样偏差)(t e 是连续信号,电位器的输出的e *τ(t)是脉冲信号。
连续信号转变为脉冲信号的过程,成为采样或采样过程。
实现采样的装置成为采样器。
To —采样周期,f s =--To1采样频率,W s =2πf s —采样⾓频率 2.信号复现因接触时间很⼩,τo T ??τ,故可把采样器的输出信号)(t e *近似看成是⼀串强度等于矩形脉冲⾯积的理想脉冲,为了去除采样本⾝带来的⾼额分量,需要把离散信号)(t e *恢复到原信号)(t e 。
实现⽅法:是在采样器之后串联⼀个保持器,及信号复现滤波器。
作⽤:是把)(t e *脉冲信号变成阶梯信号e h (t)3.采样系统结构图r(t),e(t),c(t),y(t)为连续信号,)(t e *为离散信号)(s G h ,)(s G p ,)(s H 分别为保持器,被控对象和反馈环节的传递函数。
(t)r4.采样系统⼯作过程由保持器5. 采样控制⽅式采样周期To ??=≠=?相位不同步采样常数常数6. 采样系统的研究⽅法(或称使⽤的数字⼯具)因运算过程中出现s 的超越函数,故不⽤拉式变换法,⼆采⽤z 变换⽅法,状态空间法。
第⼆节信号的采样和复现第⼀节是定性认识与分析,本节是定量研究。
⼀、采样过程从第3个图形可知,采样器输出信号)(t e *是⼀串理想的脉冲信号,k 瞬时)(t e *的脉冲强度等于此时)(T e 的幅值)(0kT e ,即)0(0T e ,)(0T e ,)2(0T e …. )(0nT e ….采样过程可以看成为⼀个幅值调制过程,采样器如同⼀个幅值调制器。
现代控制理论 第一章 绪论
控制论之父— 控制论之父 —维纳 维纳
2.我国著名科学家钱学森将控制理论应用于工程实 2.我国著名科学家钱学森将控制理论应用于工程实 我国著名科学家钱学森 并与1954年出版了《工程控制论》 1954年出版了 践,并与1954年出版了《工程控制论》。
钱学森
从四十年代到五十年代末,经典控制理论的 发展与应用使整个世界的科学水平出现了巨大 的飞跃,几乎在工业、农业、交通运输及国防 建设的各个领域都广泛采用了自动化控制技术。 (可以说工业革命和战争促使了经典控制理论 的发展)。
闭环与开环控制系统的比较
优点 闭环 采用了反馈, 采用了反馈,因而使系统的响 应对外部干扰和内部系统的参 数变化均相当不敏感。 数变化均相当不敏感。 控制精度高 构造简单,维护容易; 构造简单,维护容易; 成本比相应的闭环系统低; 成本比相应的闭环系统低; 不存在不稳定性问题; 不存在不稳定性问题; 当输出量难于测量, 当输出量难于测量,或者要测 量输出量在经济上不允许时, 量输出量在经济上不允许时, 采用开环比较合适( 采用开环比较合适(比如洗衣 机)。 扰动和标定尺度的变化 将引起误差, 将引起误差,从而使系统 的输出量偏离希望的数值; 的输出量偏离希望的数值; 精度通常较低, 精度通常较低,无自动 纠偏能力。 纠偏能力。 缺点 存在稳定、振荡、超调等问题; 存在稳定、振荡、超调等问题; 系统性能分析和设计较麻烦。 系统性能分析和设计较麻烦。
1.5控制理论中的一些术语
(6)反馈控制 ) 是这样一种控制,它能够在存在扰动的情况下, 是这样一种控制,它能够在存在扰动的情况下,力图 减少系统的输出量与某种参考输入量之间的偏差, 减少系统的输出量与某种参考输入量之间的偏差,且 其工作原理是基于这种偏差。 其工作原理是基于这种偏差。 这里的扰动是指不可预测的扰动。 这里的扰动是指不可预测的扰动。对于可预测或已知 的扰动,总是可以在系统内部加以补偿。 的扰动,总是可以在系统内部加以补偿。
现代控制理论知识点汇总
第一章 控制系统的状态空间表达式1. 状态空间表达式n 阶 DuCx y Bu Ax x+=+=&1:⨯r u 1:⨯m y n n A ⨯:r n B ⨯:n m C ⨯:r m D ⨯:A 称为系统矩阵,描述系统内部状态之间的联系;B为输入(或控制)矩阵,表示输入对每个状态变量的作用情况;C 输出矩阵,表示输出与每个状态变量间的组成关系,D直接传递矩阵,表示输入对输出的直接传递关系。
2. 状态空间描述的特点①考虑了“输入-状态-输出”这一过程,它揭示了问题的本质,即输入引起了状态的变化,而状态决定了输出。
②状态方程和输出方程都是运动方程。
③状态变量个数等于系统包含的独立贮能元件的个数,n 阶系统有n 个状态变量可以选择。
④状态变量的选择不唯一。
⑤从便于控制系统的构成来说,把状态变量选为可测量或可观察的量更为合适。
⑥建立状态空间描述的步骤:a 选择状态变量;b 列写微分方程并化为状态变量的一阶微分方程组;c 将一阶微分方程组化为向量矩阵形式,即为状态空间描述。
⑦状态空间分析法是时域内的一种矩阵运算方法,特别适合于用计算机计算。
3. 模拟结构图(积分器 加法器 比例器)已知状态空间描述,绘制模拟结构图的步骤:积分器的数目应等于状态变量数,将他们画在适当的位置,每个积分器的输出表示相应的某个状态变量,然后根据状态空间表达式画出相应的加法器和比例器,最后用箭头将这些元件连接起来。
4. 状态空间表达式的建立① 由系统框图建立状态空间表达式:a 将各个环节(放大、积分、惯性等)变成相应的模拟结构图;b 每个积分器的输出选作i x ,输入则为i x &;c 由模拟图写出状态方程和输出方程。
② 由系统的机理出发建立状态空间表达式:如电路系统。
通常选电容上的电压和电感上的电流作为状态变量。
利用KVL 和KCL 列微分方程,整理。
③由描述系统的输入输出动态方程式(微分方程)或传递函数,建立系统的状态空间表达式,即实现问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a. x t t t x (t 0 ) 表示系统在 t 0时刻的状态
0
b.
若初值x t 0 给定,t t 0时的u t 给定,则状态变量完全 确定系统在t t 0时的行为.
注:状态变量的选取不唯一。
状态变量不一定在物理上可量测。 尽可能选取易量测的量作为状态变量。
数值型和逻辑型 线性和非线性 时变和定常的 连续时间型和离散时间型 集中参数和分布参数等
这种描述系统动态特性的数学表达式称为系统的动态 方程
建立数学模型的主要方法有
机理分析建模 实验建模(系统辨识)
动态系统数学描述的基本方法
外部描述-输入输出描述 内部描述-状态空间描述
7、输出方程
描述系统输出变量和系统状态变量、输入变量之间关系的 代数方程。 一般形式:
y(t ) g ( x(t ), u(t ), t ) y (tk 1 ) g ( x(tk ), u (tk ), tk )
8、状态空间表达式
状态方程和输出方程合起来构成对一个动态系统完整的描述, 称为动态系统的状态空间表达式。(2)及ຫໍສະໝຸດ RL y ucn RL R0
(3)
在已知输入u的情况下,解方程式(2)、式(3),不仅可求出输出响应y, 而且能得知系统内部电容上电压随时间变化的动态过程信息。因此,式(2)、 式(3)是图所示电网络系统的一种完全描述。
4、因果性
系统在t时刻的输出取决于t时刻和t时刻之前的输入, 和t时刻之后的输入无关,则称系统具有因果性。
静态系统的输出取决于当前系统的瞬时输入,而动
态系统的输出取决于系统当前及过去的输入信息的 影响的叠加
如,电阻的电流直接等于当前的电压输入与电阻值
之比,而电容两端的电压是通过电容的当前及过去 的电流的积分值与电容值之比
• 在进行动态系统的分析和综合时,首先应建立该 系统的数学模型
在系统和控制科学领域内,数学模型是指能描述动态 系统的动态特性的数学表达式,
本课程的任务是系统分析和系统设计。而不论是系统分析还是系统 设计,都是基于系统的数学模型来进行的。因此,本章首先介绍控 制系统的数学模型。
本章主要内容为:
1、状态和状态空间表达式
2、系统状态空间模型的建立 3、状态空间描述和传递函数矩阵 4、线性变换 5、组合系统的数学描述 6、离散系统的数学模型 线性连续时间 系统为主
(t ) f ( x(t ), u (t ), t ) x y (t ) g ( x(t ), u (t ), t )
或
x(tk 1 ) f ( x(tk ), u (tk ), tk ) y (tk 1 ) g ( x(tk ), u (tk ), tk )
5、线性
当对于任何输入u1和u2及任何实数a,均有 可加性: H(u1+u2)=H(u1)+H(u2) 齐次性: H(au1)=aH(u1) 则称系统是线性的,否则为非线性。
1.2 系统状态空间描述中的基本概念
1、状态 表征系统运动的信息和行为 2、状态变量 完全表征系统运动状态的最小个数的一组变量。 表示符号:x1(t),x2(t),…,xn(t)
• 控制理论主要是研究动态系统的系统分析、 优化和综合等问题
动态系统(动力学系统)指能储存输入信息 (或能量)的系统。
含有电感和电容等储能元件的电网络系统 含有弹簧和质量体等通过位移运动来储存机械能的
刚体力学系统 存在热量和物料信息平衡关系的化工热力学系统等
这类系统与静力学系统的区别在于:
x2
x(t0)
x ( t 1) x ( t 2) x(t) x1
图 二维空间的状态轨线
6、状态方程
描述系统状态变量和输入变量之间关系的一阶微分方程 组(连续时间系统)或一阶差分方程组(离散时间系统)。
一般形式: x (t ) f ( x(t ), u(t ), t )
x(t k 1 ) f ( x(t k ), u (t k ), t k )
系统数学描述的两种基本方法
被控过程 执行器 被控对象 控制器 x 观测y
控制u
传感器
反馈控制
控制输入
典型控制系统方框图
u1 u2 up
被 控 过 程
y1
x1 , x2 ,xn
y2 yq
1.1 系统描述中的基本概念
1、系统 一些相互制约的部分构成的且具有一定功能的整体 2、输入和输出 u1 y1 y2 u2 输入:环境对系统的作用 x1, x2, …,xn yq up 输出:系统对环境的作用 系统的方块图表示 3、系统数学描述的类型 (1)系统的外部描述 传递函数 (2)系统的内部描述 状态空间表达式
1.2 系统状态空间描述中的基本概念
3、状态向量
把系统的n个状态变量构成一个列向量x(t),称x(t)为n维状 态向量。
x1 (t ) x (t ) x n (t )
4、状态空间
以n个状态变量为坐标轴所构成的n维空间,称为状态空间。
5、状态轨线
状态向量的端点在状态空间中 的位置,代表系统在某一时刻的运 动状态。 随着时间的推移,系统状态 在变化,并在状态空间描绘出 一条轨迹。这种系统状态向量 在状态空间中随时间变化的轨 迹称为状态轨线。
例:考察下图所示的n级RC网络。图中虚线框内 为具有放大器隔离的n级RC电路,设放大器的输入阻 抗为无穷大,输出阻抗为零,放大倍数为1。
图1 n级RC网络
系统以输入u、输出y作为变量的外部描 述为高阶线性常系数微分方程,即
y ( n ) a1 y ( n 1) a n 1 y (1) a n y bu
(1)
重新考察以上电网络,利用电路知识容易得到如下一阶微分方程组
1 1 du c1 u u c1 dt R1C1 R1C1 du c 2 1 1 uc2 u c1 R2 C 2 R2 C 2 dt 1 1 du cn u u c ( n 1) cn dt Rn C n Rn C n