基于CPLD的多路选择器在舞台吊杆控制系统中的应用
舞台吊杆控制系统研究与实现
灯 杆用 于悬挂 舞 台常规灯 具 和效果灯 具 。 景杆 主要 用 于悬 挂 幕 布 、 景 等舞 台道 具 , 场 大量 参 与演 出, 在
演 出过程 中频 繁 置换 表 演背 景,借助 灯 光 的变 幻 ,
与 舞 台表 演相 映成 辉 ,强化 了舞 台艺 术 效果 , 添 增 了舞 台艺术魅 力 。 由于 吊杆换景 均在 场 间黑场 的间
模块 化 的软件设 计, 以适 应大小 不 同、 可 功能繁杂 的 要 特 性 为 :
控制要求 。可缩短整个设计 、 生产 、 调试 周期 , 经 研制 费也相对减少。另外 ,L 操作维修容易, PC 其控制系统 工作稳定可靠, 抗干扰性能好。
兼容 P I C 总线21 . 规格
通信 速率 可达9 1 K p 2. bs 6
专 题 探 讨 e p o a in f s e i l u e t x l r to o p ca s bjc s
性 可 以保 证 系统 在 剧 场 复杂 干 扰存 在 的条 件下 安
全 运行 。 上位 操作 软件 是 采用亚 控公 司开 发 的组 态 王 组态 软 件 开发 的 ,软 件 工作 平 台为 WI NDOW S XP 。上位 机操 作 界面 提供 正常 情况 下 的安 全功 能 控制 与操 作 , 括 单体设 备 的控制 、 备状 态监视 、 包 设 预 选择 设 备 、 设定 运 动 参数 、 编组 运 行 、 景记 忆 、 场 场景 序列 等 。 主要操 作 以屏幕 窗 口 、 图形 、 表格 方式 结合 功能 键盘 或 鼠标 。并有适 当的手动 介入 功能 , 可灵 活进行 返 回 、 复 、 跃 和连续 运动 等操作 。 重 跳 系统 可 仿 真舞 台 吊杆 的升 降 状态 画面 和仿 真 操作 “ 按钮 ” 时监控 吊杆 的运行 状况 。 , 实 当系 统显示 器 画 面上 的 “ 钮 ” 触发 时 ,L 按 被 P C相应 寄存 器 中 的
毕业设计(论文)—基于PLC的舞台机械控制系统的研究与设计
摘要吊杆是一种悬吊装置,装在舞台上空,用它提升景片、挂设幕布、悬吊灯具等舞台用具。
其数量众多,使用频繁,是舞台上必备的设备。
传统的舞台吊杆控制系统多采用继电器、接触器控制方式。
由于剧场中的吊杆数量很多,所需要的继电器、接触器数目庞大,接线复杂,造成控制系统的可靠性很差。
可编程控制器是传统的继电器接触器控制方式与计算机技术的完美结合,具有可靠性高,编程直观容易的特点,己在工业控制中获得广泛应用。
另外,目前的PLC都具备通讯接口,可以与其它PLC或计算机组成网络控制系统。
这些特点决定了PLC是舞台吊杆控制器系统的首选对象。
为了便于系统的监控和管理,控制系统应具有良好人机对话窗口,即需要上位机对系统进行监控和管理。
近年来,由于组态技术的发展,基于通用组态软件,以IPC为上位监控机,以PLC为数据采集和控制机而构成的集散式(分布式)控制系统是主流方向。
舞台吊杆的控制也理当顺应了这一发展趋势。
本文研究目标是研究、开发一套基于组态软件技术和PLC控制技术的集散式舞台吊杆控制系统。
具体方案是上位机选用研华工业控制机,下位机采用西门子S7-300,构成单个微机监控多个PLC的分布式网络结构。
上位机起监控和管理作用,下位机起控制作用。
本文研究的主要内容是:(1)集散式吊杆控制系统框架的构建;(2)上位机吊杆控制系统监控软件(画面)的设计;(3)下位机单台吊杆定位控制系统的设计。
关键词:舞台吊杆;PLC控制;HMI;下位机目录1.绪论 (1)1.1选题背景与意义 (2)1.2 国内外发展现状 (1)1.2.1国内发展现状 (1)1.2.2国外发展现状 (3)1.2.3国内外发展现状对比 (4)1.3 研究的主要内容 (6)2.系统概述 (7)2.1舞台机械设备的功能与特点 (7)2.2原理框图 (8)2.3方案的论证与选择 (8)2.3.1工业控制概况 (8)2.3.2 方案的选择 (9)3.PLC硬件设计 (10)3.1可编程控制器(PLC)概述 (10)3.1.1 可编程控制器的功能 (10)3.1.2可编程控制器的基本性能指标 (10)3.2 PLC型号的选择 (11)3.3 PLC模块选择 (11)3.3.1 CPU (11)3.3.2 SM321数字量输入模块 (11)3.3.3 SM322数字量输出模块 (12)3.3.4 SM331模拟量输入模块 (12)3.3.5 电源模块(PS307 5A) (13)3.4 PLC通信技术 (14)3.4.1 S7-300的通信网络 (14)3.4.2通信接口介绍 (14)3.5 变频器 (15)3.5.1 变频器的选型 (15)3.5.2 变频器的工作原理 (15)4.软件设计 (19)4.1.S7-300软件系统介绍 (19)4.1.1 PLC编程语言的国际标准 (19)4.1.2 STEP 7 中的编程语言 (19)4.1.3 编程语言的选用 (19)4.2程序设计 (19)4.2.1 主程序和子程序的实现 (20)5.设计总结 (24)5.1系统的特点与展望 (24)5.2系统的缺陷与改进 (24)总结 (25)致谢 (26)参考文献 (27)附录 (28)1.绪论1.1选题背景与意义本设计以珠江源大剧院舞台机械控制系统为工程背景,主要是对舞台的大幕及吊笼的控制。
基于PLC的分布式舞台布光控制系统设计
() 5 当误差 符合 要求时 , G o C r c o ol选项中选择 在 e or t n T o ei s
重采样 。
6在 A c I 中新建 1 . rG S 个工程 , 加载建成区范围线 和已纠正的
式向节 目内容丰富化 、 出形式多样化 的方 向发展 。因此 , 台 演 舞
布光操作控制系统性能的优劣直接影响到舞台演出的展现效果。 本文, 笔者针对大多数舞 台布光控制系统存在 的问题 , 结合 目前 国内外舞台布光控制的技术 现状 , 设计 了一种接线简单 、 可靠性与稳定 性较高 、 便于维 护的新型舞 台布 光控制系统 。即 采用西 门子 s — 0 系列 P C架构组成 的分布 式 I 750 L / O系统 , 用 利 Po bs r u 总线作为通讯 网络总线 , i f 既能简化 系统的控制 线路 , 又
焦作师范高等专科学校 物理与电子工程学院
近年来 , 许多城市 为提升城市 品位和满足 市民休 闲娱乐 需
求 , 纷兴建 了现代 化的剧 院和电视台演播厅 。现代化 的剧 院 纷 和电视台演播 厅的舞台演出已从单一 的专 题报 告会 和晚会 等形
李 慧
台布光操作控制系统提出了以下几点要求 : () 1 舞台布光操作控制系统要能可靠 、 方便 、 快捷 、 安全地对 舞 台吊杆和舞台灯具的位 置和姿态进行调整。
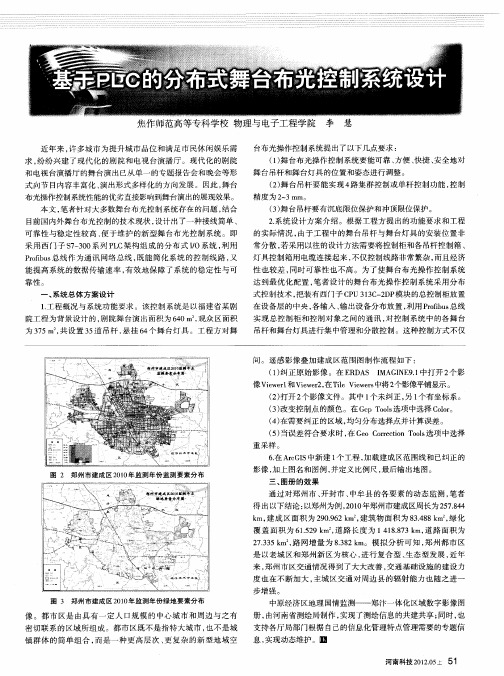
图 2 郑州市建成区 21 0 0年监 测 年 份 监 测 要 素 分 布
影像 , 加上 图名 和图例 , 并定义 比例尺 , 最后输 出地图。
三 、 册 的效 果 图
通过对 郑州市 、 开封市 、 中牟县 的各要素 的动态监测 , 笔者 得 出以下结论 : 以郑州为例 ,00 2 1 年郑州市建成区周长为 2 7 4 5. 4 8 k 建成 区面积 为 2 09 2k 建 筑物 面积为 8 . 8k 绿 化 m, 9 . m , 6 34 m , 8 覆 盖 面积 为 6 .2 m , 1 9k 道路 长度 为 1 1. 3k 道路面 积为 5 88 m, 4 7 2 . 5k 路 网增量 为 8 8 m。模拟 分析可 知 , 7 3 m , 3 . 2k 3 郑州都 市区
毕业设计(论文)-舞台吊杆控制系统设计
目录摘要...................................................................................................................................................... 1 关键词.................................................................................................................................................. 1 Abstract ................................................................................................................................................2 Key words ............................................................................................................................................2 1 概述..................................................................................................................................................31.1 舞台吊杆控制系统发展的状况..............................................................................................3 1.2 变频器技术的发展状况..........................................................................................................4 1.3 PLC 发展状况..........................................................................................................................5 1.4 本课题研究的意义 .................................................................................................................6 2 舞台吊杆控制系统整体设计..........................................................................................................7 2.1 系统功能及结构框图 .............................................................................................................72.1.1 系统功能.........................................................................................................................7 2.1.2 系统结构框图................................................................................................................7 2.2 电动机的选型 .........................................................................................................................7 2.3 变频器的选型 .........................................................................................................................8 2.4 PLC 的选型 .............................................................................................................................9 3 舞台吊杆控制系统的实现............................................................................................................11 3.1 自动控制电路的设计 ........................................................................................................... 11 3.1.1 PLC 控制部分 ..............................................................................................................12 3.1.2 PLC 控制变频器 ..........................................................................................................13 3.1.3 变频器控制电动机.......................................................................................................14 3.2 手动控制电路的设计 ...........................................................................................................16 3.3 配电系统电路设计 ...............................................................................................................16 4 结论................................................................................................................................................17 参考文献............................................................................................................................................18舞台吊杆控制系统设计摘要:现代化的影剧院,需要现代化的舞台设备。
基于PLC的舞台控制系统
基于PLC的舞台控制系统1引言随着人们文化生活水平的提高,对舞台演出节目的质量要求越来越高。
舞台的现代化、智能化是必然的发展趋势。
国内虽有部分舞台参照了国外的舞台形式,但整体的技术水平较低,不能满足舞台使用的各种功能要求。
针对剧院(包括电视台演播厅)舞台的台面固定,造型、风格单一,舞美总体效果达不到表演要求的现状,依据舞台建造时的总体工艺方案设计,通过PLC控制及机、电、液一体化技术使通信系统能够实现上位计算机、PLC以及现场智能仪器之间良好、快速的通信,从而完成了现场数据的实时显示与控制。
实现舞台的升降、移动升降、旋转、升降旋转、伸缩、伸缩升降等运动,从而达到舞台与舞美、演员、场景、灯光等协调变化功能,使精彩纷呈的演出更加丰富多彩、变幻无穷。
智能舞台一次投资建成后,由于其多种舞台的组合变化形式,可满足各种演出节目的要求,故可免去许多原来须根据不同演出搭建不同舞台的重复搭建演出舞台的弊端,并且还增加了演出的场景变化,丰富了演出效果。
本文以某广播电视中心800m2演播厅智能舞台的设计安装与调试为研究背景说明s7-200[1]在舞台的台面控制中的应用。
2 智能舞台控制系统构成2.1 舞台台面组成舞台台面运动可以实现舞台的升降、移动升降、旋转、升降旋转、伸缩、伸缩升降等运动,舞台的基础变化将达到数十到近百种,从而达到舞台与舞美、演员、场景、灯光等协调变化功能,避免了传统的为一次性使用而反复搭建基础舞台造成的人力、物力、财力的浪费,缩短了节目舞台准备周期,使精彩纷呈的演出更加丰富多彩、变幻无穷。
智能舞台台面控制系统主要针对单元舞台台面运动进行控制。
图1为某广播电视中心800m2演播厅智能舞台台面结构,包括5个升降台面,一个通道台面,一个旋转台面和一个T型台面,其中1#~5#为升降台,6#为通道台,7#为旋转台,8#为带伸缩功能的T型台。
8块活动台面均有现场手动和自动工作方式选择,当选择工作方式时,其所有动作均由PLC完成。
基于CPLD的多路高精度PWM控制器

基于CPLD的多路高精度PWM控制器摘要:近年来舵机被广泛运用在机器人控制中。
利用单片机来控制舵机需要消耗大量的I/0口,从而使单片机没有足够的I/0口资源,为了能有效的解决这个问题,我们设计了基于CPLD的PWM控制器。
实现了多个舵机的同时控制,并且具有很高的精确度。
这里主要围绕舵机的速度控制进行深入浅出的介绍。
关键词:CPLD舵机控制PWM1系统组成及工作原理从功能上看,整个系统可以分成三大块,分频器(Frequencydivider)、数据分频器(Data distributor)、PWM脉冲生成器(PWM-generator)。
如图1所示。
分频器的作用是根据精度确定频率。
数据分配器的作用是经单片机控制将单片机内设置好的数据分别发给PWM生成器各接收端。
PWM生成器的作用是将接收到的数据转化成脉冲。
这里假定单片机提供最大数据传输为8位数据线。
转换成十进制的最大数值为256。
如想达到更高的精度可以将数据传输线该为16位或32位的。
以实现高精度。
舵机主要由以下几个部分组成:罗盘、减速齿轮、比例电位器(位置反馈电位计)、直流电机(马达)、控制电路板等。
舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这两根线给舵机提供最基本的能源保证,主要是电机的转动消耗。
电源有两种规格,一种是4.8V,另一种是6.0V。
分别对应不同的转矩标准,即输出力矩不同,而6.0V对应的输出力矩要大。
舵机的控制信号为周期是20ms左右的脉宽调制信号,其中脉冲宽度变化范围为0.5ms-2.5ms,对应舵盘的位置为0-180度,呈线性变化,如图2所示。
也就是说,给它提供一定的脉宽后,无论外界转矩怎样改变,舵机的输出轴都会保持在一个相对应的角度上,直到给它提供另外一个宽度的脉冲信号,才会改变输出角度到新的对应的位置上。
舵机内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。
自适应模糊PID在舞台吊杆控制中的应用

4 2・
工业 仪表与 自动化装置
2 0 1 3年第 2期
自适 应 模 糊 P I D 在 舞 台 吊杆 控 制 中 的应 用
王 小轶 , 武少飞
( 中 国航 空工 业集 团公 司洛 阳 电光设备 研 究所 光 电 系统 部 , 河南 洛阳 4 7 1 0 0 9 )
摘要: 采用 自适应模糊 P I D控制 , 有效地解决 了舞台吊杆定速控制 中存在的误 差大、 实时性差、 零速停靠困难等实际问题。结合舞台吊杆的运行特征 , 控制 系统采 用上位机与下位机相结合的形 式, 上位 机 通过 工业 以太 网给 下位机 发送 相 关的运 行参 数信 息 , 下位机 利 用 自适应模 糊 P I D控 制 算
wa s a p p l i e d t o t h e c o n t r o l s y s t e m ,t he u p p e r c o n t r o l l e r s e n d t h e r u n n i n g p a r a me t e r s t o t h e l o we r c o n t r o l l e r t h r o ug h t h e i n d us t ia r l Et h e r n e t . Us i n g a d a p t i v e f uz z y PI D c o n t r o l ,t h e l o we r c o n t r o l l e r c a l c u l a t e d o u t p u t a n d c o mmu n i c a t e d wi t h i n v e r t e r t h r o u g h CAN b u s,u s i n g v a r i a b l e ̄e q ue n c y r e a l i z e d v a ia r b l e s p e e d c o n — t r o l i n s t a g e b o o m c o n t r o 1 .Un i q u e d e g r e e v a l ue e ne o d e r wa s u s e d t o ̄e d b a c k t h e r e a l—t i me i n f o r ma t i o n t o t he l o we r c o n t r o l l e r .S y s t e m t e s t i n g r e s u l t s s h o we d t h a t t he me t ho d r e a l i z e t he v a r i a b l e s pe e d c o n t r o l a nd z e r o s pe e d p a r k o f t h e s t a g e b o o m ma c h i n e r y. Ke y wor ds: s t a g e b o o m ma c h i n e y; r a d a p t i v e f uz z y PI D c o n t r o l ; v a ia r b l e s p e e d c o n t r o l ; r e a l—t i me; z e r o s t h e s t a g e b o o m o p e r a t i o n,a c o mb i n e d c o n i f g u r a t i o n o f l o we r a c q u i s i t i o n mo d u l e a n d u p p e r c o n t r o l l e r
基于CPLD的多相位交通信号控制器设计的开题报告
基于CPLD的多相位交通信号控制器设计的开题报告一、研究背景随着城市交通的快速发展,特别是车辆数量不断增加,交通安全问题受到越来越高的重视。
在城市交通控制中,交通信号控制器是一个关键的组成部分。
传统的单相位交通信号控制器已不能满足城市交通的需求。
因此,多相位交通信号控制器成为一种研究的热点。
随着数字电路技术的发展,可以使用现场可编程逻辑门阵列(CPLD)来设计多相位交通信号控制器系统。
CPLD是一种数字电路器件,具有可编程、可重构等特点,适合于设计非常规逻辑电路和特定应用电路。
二、研究目的本文的研究目的是设计一种基于CPLD的多相位交通信号控制器系统。
具体来说,研究内容包括以下几个方面:1. 分析多相位交通信号控制器的工作原理与特点,重点考虑控制器的时序设计。
2. 设计多相位交通信号控制器的硬件电路,包括电源电路、时钟电路、输入输出电路和控制逻辑电路等。
3. 使用Verilog HDL进行多相位交通信号控制器的功能模拟、综合和仿真等操作。
4. 确定多相位交通信号控制器的系统性能指标,比如最大控制路口数、最大控制时序等。
三、研究内容和方法1. 多相位交通信号控制器的工作原理与特点分析通过对多相位交通信号控制器的工作原理与特点进行分析,了解控制器的时序设计,包括控制周期、时序时刻、输出脉冲宽度等。
2. CPLD芯片选型根据多相位交通信号控制器的特点,选择合适的CPLD芯片。
选型需要考虑一些关键指标,如CPLD芯片的时钟速度、IO端口数量、可用逻辑单元数等。
3. 多相位交通信号控制器硬件电路设计使用EDA软件Altium Designer进行多相位交通信号控制器硬件电路设计,包括电源电路、时钟电路、输入输出电路和控制逻辑电路等。
4. Verilog HDL代码编写使用Verilog HDL进行多相位交通信号控制器的功能模拟、综合和仿真等操作,对该系统进行功能验证和性能评估。
5. 多相位交通信号控制器性能评估根据研究目的,确定多相位交通信号控制器的系统性能指标,比如最大控制路口数、最大控制时序等。
舞台PLC控制系统设计毕业设计

毕业论文(设计)舞台PLC控制系统设计舞台是为演员表演提供的空间,它可以使观众的注意力集中于演员的表演并获得理想的观赏效果。
舞台通常由一个或多个平台构成,它们有的可以升降。
剧场建筑的主要构成部分之一。
指观众席前面的演出场所。
古代露天剧场的舞台主台大都前伸于观众席之中,或低于观众席(如古希腊扇形剧场的舞台),或高于观众席(如中国的庙台),供观众从三面看戏。
室内剧场的舞台通常正对观众席,有镜框舞台、伸出型舞台、中心舞台等。
目录1绪论 (1)1.1课题研究背景 (1)1.2本课设计的内容 (4)1.3本课设计的目的意义 (5)2系统控制方案的确定 (6)2.1自动舞台的概述 (6)2.2采用PLC控制自动舞台的优点 (6)2.3系统设计的基本步骤 (6)2.4系统控制方案 (8)2.5自动舞台控制系统及原因图 (9)3系统文件设计 (11)3.1可编程控制(PLC)的选型 (11)3.2电动机选型 (16)3.3硬件接线图 (18)3.4I/O分配表 (20)4电器原理及系统流程设计 (22)4.1舞台控制程序的工作原理 (22)4.2系统工作流程图 (24)5设计总结 (25)致谢 (26)参考文献 (27)附录:梯形图 (28)舞台PLC控制系统设计摘要:针对剧院舞台的台面固定,造型、风格单一,舞美总体效果达不到表演要求的现状,依据舞台建造时的总体工艺方案设计,通过PLC控制及机、电、液一体化技术使实现舞台的升降、移动升降、伸缩、伸缩升降等运动,从而达到舞台与舞美、演员、场景、灯光等协调变化功能,使精彩纷呈的演出更加丰富多彩、变幻无穷。
可满足各种演出节目的要求,故可免去许多原来须根据不同演出搭建不同舞台的重复搭建演出舞台的弊端,并且还增加了演出的场景变化,丰富了演出效果。
本文研究目标是研究、开发一套基于组态软件技术和PLC控制技术的舞台控制系统。
通过plc控制液压升降臂及交流电动机实现对舞台的上升下降及三层帘幕的开启与关闭。
舞台灯光吊杆控制系统设计
舞台灯光吊杆控制系统设计摘要:通过介绍可编程控制器(PLC)在舞台灯光吊杆控制系统中的应用,阐述 PLC 控制系统硬件和软件的设计方法。
表明 PLC通过现场总线通讯实现大规模从站设备控制和提高产品的可靠性方面都具有极好的性能和优势,能满足现代化剧场对吊杆控制的要求。
关键词:舞台吊杆;可编程控制器(PLC);控制系统要完成舞台灯光效果的设计与实现,需要控制好舞台灯具动作以及各类灯光效果,舞台灯具动作控制是舞台灯光效果控制的基础。
舞台灯具的控制主要为灯具的升降动作及灯具的位置控制,舞台灯光吊杆控制系统实现舞台灯具的动作控制。
一、舞台灯光控制设计的特点(一)舞台灯光的研究意义优质的舞台灯光是提升舞台质量的一个重要因素。
不论是在照明、渲染气氛还是打造舞台的空间感与时尚感上,舞台灯光都是一个至关重要的角色。
我国的舞台灯光产业从一开始依赖于国外进口,到后来对外来产品进行仿制,再到如今,国内企业已经能够自己完成灯光的设计与制造。
但由于目前的国内技术还处于低端阶段,仍需从国外进口高性能的舞台灯光。
因此,对舞台灯光的研究有着深远的发展意义。
(二)舞台灯光控制的重要作用随着科技的发展,舞台灯光的使用越来越多的受到观众们的喜爱与追捧。
譬如,充满特技效果的电影《变形金刚4》在收获高票房的同时也赢得了观众们的口碑。
当然,电影中的优质画面离不开剧组对灯光、音响及其他设备的精确控制。
表演手段的相互配合,打造了一部深受观众追捧的优质佳片。
由此可见,舞台灯光的控制已经成为演艺事业中必不可少的重要组成。
(三)舞台灯光控制系统存在的问题在舞台表演中,灯光控制系统的地位渐渐变得重要起来,但在系统的设计上,还存在一些问题。
在灯光系统的研究上,研究人员更多地关注于灯具通讯以及单个灯具的硬件方面,而忽略了整个舞台灯或电脑灯系统上的理论建模,以及对控制思想进行研究。
此外,灯光系统通常为固定安装或通过人工调节位置,大大加重了工作人员的工作量。
综上所述,应在考虑多方面的因素下,对现有系统进行优化,增加灯光吊机控制系统。
一种基于CPLD的舞台吊杆操作台设计
程 击华 / 耒 2瞥
・ 建飞 赵 借
( 上 海 大学机 电工程 与 自动化 学院 , 上海 2 0 0 0 7 2 )
摘
要 :为了解 决 当前 操 作 台与 P L C信 息传输 过程 中 的数据量 大 、 实时性 、 抗干 扰性 等 问题 , 提 出了一 种 基 于 C P L D的舞 台 吊杆操 作
关键 词 :C P L D P L C I / O 可 靠性
中图分 类号 :T P 2 3
A / D转 换
上位 机
文献标 志码 :A
Ab s t r a c t: I n o r d e r t o me e t t h e r e q ui r e me n t s o f t h e i n f o r ma t i o n t r a n s mi s s i o n pr o c e s s b e t we e n c o n s o l e a n d P LC,i . e .,hu g e a mo u n t o f d a t a,r e a l
舞 台吊杆是舞 台设 备 的重 要组 成部分 。 用于 提升
l o g i c d e v i c e , C P L D ) 的 控制 方案 。
1 控 制原 理及总体 设计
1 . 1 舞台 吊杆 控制原 理
景片 、 挂设幕布等舞 台用具 H ] , 且数量众多 、 使用频繁 。
r e a l i z e d t h r o u g h Q u a r t u s 1 1 5 . 1 s o f t w a r e p r o g r a m m i n g .T h e r e s u h s o f s i m u l a t i o n a n d p r a c t i c a l a p p l i c a t i o n i n d i c a t e t h a t t h e d e s i g n i s s i m p l e a n d
PLC与PC机相结合的舞台电动吊杆综合保护系统
1 保 护 系 统
为了操作和 管理起来 更加的方 便 ,我们将上 位 P C机和 下位 P L C
R S 4 8 5 ,C P U和 P C机 可以进行 通 信 ,对相 应 的运行程 序进行 存储 , 结 合运行程序 ,发出相关命令 。
其次是数字量扩展模块 ,因为我们需要对 上下行程开关信 号、重 相 结合的保 护系统给应 用了过来 。上位 P C机具 有 良好 的人 机交互 界 量传感器的松绳信号 、温度信号 以及变频器 故障信号等进行采集 ,并 面 ,菜 单化管理可 以实现 ,并且可 以对 吊杆 的运 行状 态实时监控 。下 且 要对各 种报 警信号进行 输 出。因为 C P U模 块具备 的数字输 入点 为
出现 的各 种故障准确可靠 的检 测 ,在将报警信号发 出来的基础上 ,还 绳不好 ,那么在 吊杆运行过程 中,钢丝绳就有不 同的伸缩长度 。上述 可 以将主 回路 自动切断 ,促使 安全 保护的 目的得到 实现 ,提升了剧场 的这些 问题 ,都 会导致钢丝绳松绳 问题的出现 。如果杆体 上悬挂的物 电动 吊杆 的安全性和稳定性 。 并且本系统 中, 有机结合 了P L C 和P C 机,
位P L C则可以进行诊断、报警和监控 ,并且能够稳定可靠 的运行 ,具
1 4 个 ,但 是数字输 出点却 只有 1 O 个 ,因强的抗 干扰能力 。为 了促使实 时监 控需求 得到满足 ,上 位 P C机 展模块 ,它具有 8 个数 字量输 出点。 和下位 P L C 之 间的通信 功能需要实现。 本系统可 以避免 吊杆上行冲顶 , 再次是模拟量扩展模块 ,因为我们需要对漏 电信号 、短路信号和 下 行也不 会与 台面所接 触;如果有松绳现象或者超 载问题出现于 吊杆 过 载信 号等三 个模拟输入 信 号进行采 集 ,但是 对于本 C P U来讲 ,模 运行过 程中 ,就会有报 警信 号发出 。如果 电机表 面有着较高 的温度 , 拟 量输入点是不具备 的 ,因此 ,我们就扩展 了一 个模块 ,它没有模拟 那么P L C除了发出报警信号之外 ,还会保护系统 。如果有过流 短路 量输 出点 ,但是 却有三个模拟詹输入 点。 或者漏 电等问题 出现于 电机 中 ,就可 以保护 电机 。可 以利用上位机来
采用了EDA技术实现让单片机和FPGA器件设计舞台吊杆控制系统
采用了EDA技术实现让单片机和FPGA器件设计舞台吊杆控制系统在舞台机械设备中,吊杆起着重要的伤脑筋。
在大型的影剧院,一场演出往往需要调动大量的舞台背景,有时要控制多达64路的吊杆同时动作。
操作人员要在现场不断变换舞台背景,控制室人员要不断地和现场人员进行协调,这给舞台控制带来了很大不便。
对吊杆的集中控制、实时响应来自多路的请求及吊杆位置的精确定位是设计中要解决的三个关键问题。
目前的舞台控制系统大都通过采用光电编码盘产生脉冲信号的方式来获取吊杆的移动距离,并直接用单片机进行计数和控制。
这种方法在响应多路请求时,往往会因为单片机任务繁重而造成计数脉冲丢失,引起测量误差。
综上所述,本文提出了用CYGNAL单片机和FPGA设计舞台吊杆控制器的方法。
1 舞台吊杆控制系统的组成及工作原理舞台吊杆控制系统主要由远程控制端(PC机)、舞台吊杆控制器、现场设备、LCD显示器等组成,如图1所示。
系统采用分布式结构。
远程控制端作为管理机,负责管理和协调现场设备,通过局域网使用UDP/IP协议发送控制指令并采集现场数据;舞台吊杆控制器作为终端,接收远程控制端送来的指令,并根据接收到的控制命令控制现场设备动作,采集到现场数据后把数据以UDP格式打包送给远程控制端,以便远程控制端实时进行现场监控。
同时为使现场能够观察到单个设备的运行情况。
还把这些数据通过串口送给现场LCD显示器。
2 舞台吊杆控制器的硬件设计在整个控制系统中,舞台吊杆控制器是设计的关键,它的功能有两个:其一,接收与发送UDP数据包,解析数据包并转化成FPGA控制器能够识别的格式。
其二,接收FPGA控制器送来的现场信息。
2.1 舞台吊杆控制器的硬件组成及工作原理舞台吊杆控制器主要由C8051F020单片机、FPGA控制器、LCD显示器、E2PROM存储器、RTL8019网卡芯片和JTAG程序下载及调度接口等组成。
其硬件组成框图如图2所示。
基于CPLD的程控多路切换开关设计

基于CPLD的程控多路切换开关设计
王呈健;马艳;高天德
【期刊名称】《计算机测量与控制》
【年(卷),期】2009(017)004
【摘要】针对多路模拟开关在自动测试设备等领域的广泛应用,介绍了一种可程控多路切换开关的硬件设计,采用低漏电流高压MOS电子开关作为开关元件,通过PC104总线实现上位机与系统之间指令和数据的传输,以CPLD为主控制模块.对CPLD功能模块划分,分别实现总线接口和开关逻辑控制功能,最后系统硬件板经过调试和测试,结果表明系统具有导通电阻小、关断电阻大、切换速率快等优点.【总页数】3页(P754-756)
【作者】王呈健;马艳;高天德
【作者单位】西北工业大学,航海学院,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072
【正文语种】中文
【中图分类】TP17
【相关文献】
1.基于CPLD的高精度可程控多路信号源 [J], 王庆;刘涤尘
2.基于CPLD的非多路复用与多路复用总线转换桥的设计与实现 [J], 李启瑞;柏均;王传良
3.基于CPLD的多路数字开关电路的设计 [J], 曾全胜
4.程控多路宽电压通道切换电路设计 [J], 王勇;曹磊;王金婵
5.基于CPLD的多路视频帧切换技术研究 [J], 黄海路;蒋念东
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CPLD的并行多路数据采集控制器

基于CPLD的并行多路数据采集控制器
高振斌;苏彦莽
【期刊名称】《河北大学学报(自然科学版)》
【年(卷),期】2005(025)004
【摘要】设计了一种基于可编程逻辑器件的并行多路数据采集控制器.该控制器可以控制10路AD转换器,根据配置对2种最多达660个通道进行数据采集.采用乒乓存储器同时进行数据采集和传输;使用片内共享存储区存储配置数据并返回特定通道数据;设计了工作时钟发生器以维护工作时序,同时可降低芯片功耗.控制器采用VHDL(超高速集成电路硬件描述语言)语言在RTL(寄存器传输级)级设计,并在单片CPLD(复杂可编程逻辑器件)上实现.设计结果表明,该控制器具有体积小、功耗低、易于移植等优点.
【总页数】7页(P424-430)
【作者】高振斌;苏彦莽
【作者单位】河北工业大学,信息工程学院,天津,300130;河北工业大学,信息工程学院,天津,300130
【正文语种】中文
【中图分类】TN919
【相关文献】
1.基于CPLD的多路数据采集系统的设计与实现 [J], 王毓宝;曾涛
2.基于CPLD的多路数据采集系统 [J], 王芳;严胜刚;陈勇;李芳庆
3.基于CPLD的多路数据采集系统的设计 [J], 王国强;段新文
4.基于CPLD的多路数据采集系统的设计 [J], 刘战忠;刘笃仁;张玉冰
5.基于CPLD和DSP的不同采样速率多路数据采集系统的设计 [J], 周杰;陈贤祥;杨集;任仁;夏善红
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
吊杆 选 择 少 数 电机 进 行 拖 动 的 功 能 , 舞 台 吊杆 控 制 系 是
统 中 必 不 可 少 的 部 分 。 而 多 路 选 择 器 实 现 的 方 法 有 很
多, 目前 大 多 数 都 是 采 用 单 片 机 作 为 核 心 芯 片 来 进 行 控 制 , 单 片 机 容 易 受 到 强 电设 备 开 关 时 产 生 的 电 气 干 扰 但
(i un ehooy n B s es ol e, uin a 6 3 C i ) Sc a Tc nlg ad ui s h n C l g D j g n 18 0, hn e ay 1 a
Ab ta t s r c :T i p p r d s n d a MUX b s d o tr s MAX I s r f c i s E M5 0 4 C hs a e e i e g a e n Al a e I e i S o h p P 7 T1 4 5,i t d c d t e a p ia in o e nr u e h p l t f o c o mu t s lco ,h r w r , s ra o l — ee tr i ad a e e i lc mmu i ain r tc l a d s f r e i n,a d t e d b g i g r s l a ie . n c t s p oo o n ot e d sg o wa n h e u g n e ut w s gv n s
Ap i o i n f pl to o CPL — a e m u t-wa s l c o i t e t g c n r l c D—b s d li y ee t r n h sa e o to
s s e o b o y tm f o m
WU Q . I G ig hn i D N Q n S e g
工 作 。为 此 , 文 设 计 了 一 种 基 于 C L 的 多 路 选 择 器 。 本 PD
输 入 、 出 的 光 电 隔 离 电 路 , 采 用 工 业 级 的 光 电 输 均
耦 合 隔离器 T P2 L 5 1进 行 电 气 隔 离 。 T P 2 L 5 1为 电 流 驱 动
1 P 7 T1 4 5芯 片 简 介 E M5 0 4 C
Har wa e Te h i e d r c nqu
基于 C L P D的多路选择器在舞 台吊杆控制系统 中的应用
吴 琦 , 庆 生 丁
f 川 工 商 职 业 技 术 学 院 , 川 都 江 堰 6 3 ) 四 四 180 1
摘 要 : 给 出 了 基 于 Al r t a公 司 的 MA e X 1 列 芯 片 E M5 0 1 4 5设 计 的 多 路 选 择 器 , 介 绍 了 1系 P 7T4 C
而 “ 飞 ” 本 文选择 6 跑 。 4选 1 方 式 的 多 路 选 择 器 , 选 0 该
择 器 的 功 能 为 接 收 来 自主 控 制 器 的数 据 选 择 信 号 , 根 并
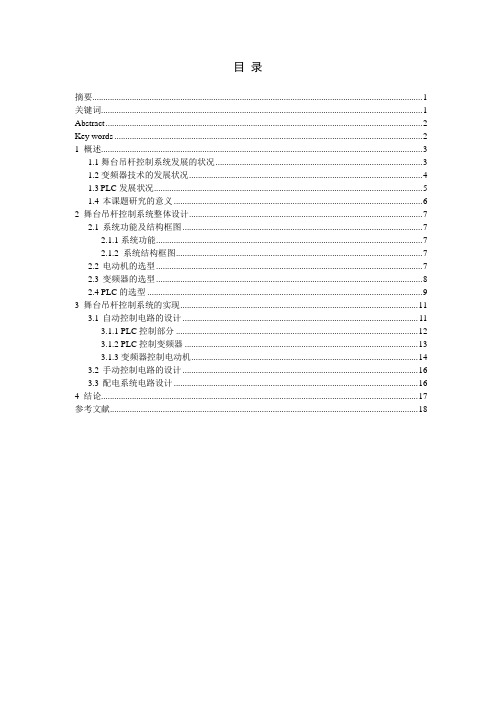
图 1 多 路 选 择 器 硬 件 系 统 框 图
据 信 号 中 对 应 的 吊杆 、 道 信 息 来 实 现 具 体 的 控 制 选 择 通
片 MA 4 5, 于 该 芯 片 内 部 为 平 衡 驱 动 器 和 差 分 接 收 X8 由
器 的组 合 , 抗 共 模 干 扰 能 力 增 强 , 总 线 收 发 器 能 检 其 且
K y wor s:MUX; C L e d P D; E M5 0 4 C P 7 T1 4 5
在 舞 台 吊杆 控 制 系 统 中 , 路 选 择 器 主 要 实 现 多 个 多
RS 8 4 5通信 模 块 、4路 输 入 接 口 、4路 输 入 光 电 隔离 电路 、 6 6 1 0路 输 出光 电 隔离 电路 、0路 输 出接 口组成 , 图 1所示 。 1 如
多路 选 择 器 的 应 用 、 件 结 构 、 硬 串行 通 信 协 议 及 软 件 设 计 , 给 出 了 调 试 的 结 果 。 并 关 键 词 : 多路 选 择 器 ; P D; P 7 T 4 C C L E M5 0 1 4 5
中 图 分 类 号 :T 2 P3 文 献 标 识 码 :A 文 章 编 号 :1 7 — 7 0 2 1 ) 7 0 1 — 3 6 4 7 2 (0 0 1 - 0 7 0
以及 驱 动 能 力 不 足 的 问 题 。
低 功耗 、 成 本 的 C L 低 P D。该 芯 片 1 8V 的 内 核 电 压 降 低 . 了 功 耗 、 高 了 可 靠 性 , 且 支 持 高 达 3 0MH 提 并 0 z的 内 部 时 钟 频 率 ; 上 的 振 荡 器 和 用 户 闪 存 , 需 要 分 立 振 荡 板 不
E M5 0 14 5是 A tr P 7 T4 C l a公 司 MA Ⅱ 系 列 中 的 一 款 e X
型 工 作 元 件 , 外 接 电 源 电 路 来 产 生 所 需 的 压 降 , 且 需 而
需 要 根 据 具 体 的 输 入 / 出 电 压 、 流 来 计 算 对 应 的 电 输 电 源 电 路 中 电 阻 的 阻 值 , 避 免 二 极 管 的 压 降 过 大 而 损 坏 以
R 4 5通 信 模 块 采 用 半 双 工 工 作 方 式 的 串行 通 信 芯 S8
器 或 者 非 易 失 存 储 器 ; 实 时 在 系 统 可 编 程 能 力 , 件 有 器
工 作 时 可 下 载 第 二 个 设 计 , 便 在 线 调 试 ; 且 该 芯 片 方 而
有 14个 可 编 程 的 IO 引 脚 , 个 IO 引 脚 均 耐 5V 电 4 / 每 /