机械原理考研讲义九(齿轮机构及其设计)
机械原理齿轮机构及其设计PPT

α
5、基圆 rb
s = e = p/2
6、齿顶高 ha
O
7、齿根高 hf
8、全齿高 h h = ha + hf
9、压力角 α
一、齿轮各部分名称
ακ
1、齿数 z
2、模数 m (非常主要旳概念) 以齿轮分度圆为计算各部分尺寸基准
齿数 z ×齿距 p = 分度圆周长 πd
分度圆直径d = z × p / π
一对齿轮作无侧隙啮合传动时,共存在四个基本原因:
两个几何原因,即一对共轭旳渐开线齿廓 给定其中任何三个原因, 两个运动原因,即两轮旳角速度 ω0 和ω 就能取得第四个原因
刀具齿廓拟定,强制刀具与轮坯以定传动比 i = ω0/ω运动
刀具旳齿廓(一种几何原因)就必然在轮坯上切削(包络)出轮 坯旳齿廓(另一种几何素)。
连续传动旳条件为:B1B2 ≥ Pb
可表达为:重叠度ε a = B1B2 / Pb≥ 1
ε a 分析:重叠度旳大小表白同步参加啮合轮齿啮合对数旳平均值
ε a = 1 时,一直只有一对轮齿啮合,确保最低连续传动; ε a < 1 时,齿轮传动部分时间不连续; ε a > 1 时,部分时间单齿啮合,部分时间双齿啮合。
pb
2
B1B2
B1P + PB2
ω2
ε = pb = πmcosα
ε=
1 (z1(tan α a1 – tanα ’) + z2(tan α a2 – tanα ’))
2π
由上式可知,重叠度 ε 与齿数 z 正有关,z 越大ε 越高;
啮合角 α’ 越大,重叠度 ε 越小。与模数m无关。
四、原则中心距 a 与实际中心距 a’
(机械制造行业)机械原理考研讲义九(齿轮机构及其设计)
(机械制造行业)机械原理考研讲义九(齿轮机构及其设计)第十章齿轮机构及其设计 10.1本章知识点串讲本章的重点有:齿轮的齿廓曲线;渐开线齿廓啮合传动的特点;渐开线各部分的名称、符号及标准齿轮几何尺寸的计算;渐开线直齿圆柱齿轮的啮合传动的条件;变位齿轮传动的基本理论及设计计算;斜齿轮﹑蜗轮蜗杆及圆锥齿轮传动的重点是它的啮合传动及设计计算的特殊点等。
【知识点1】齿轮的齿廓曲线 一、渐开线的形成二、渐开线的性质f.同一基圆上任意两条渐开线间的法向距离相等。
【知识点2】渐开线齿廓啮合传动的特点【知识点3】渐开线各部分的名称、符号及标准齿轮几何尺寸的计算 一、齿轮各部分的名称及符号二、渐开线标准直齿圆柱齿轮的几何尺寸渐开线齿廓能保证定传动比i O P O Pr r 12122121===ωω渐开线齿廓传动的特点:1.啮合线为定直线,啮合点的轨迹线——内公切线、啮合线、公法线三线合一2.啮合角为常数,啮合角:啮合线与过节点P 处两节圆的内公切线之所夹锐角。
——它等于两齿轮在节圆上的压力角。
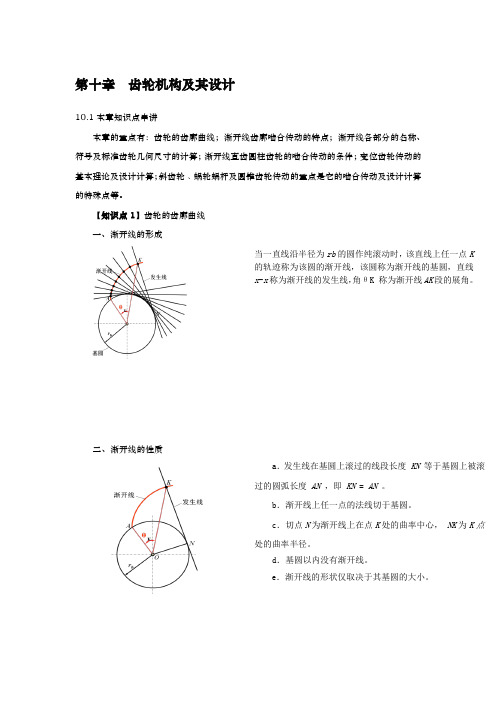
3.可分性当一直线沿半径为rb 的圆作纯滚动时,该直线上任一点K 的轨迹称为该圆的渐开线,该圆称为渐开线的基圆,直线x -x 称为渐开线的发生线,角θK 称为渐开线AK 段的展角。
1.渐开线齿轮的五个基本参数:齿数(z),模数(m),分度圆压力角(齿形角),齿顶高系数ha*,径向间隙系数c*——亦称顶隙系数。
(1)齿数(z)齿数根据设计需要确定,如:传动比、中心距要求、接触强度等。
(2)模数(m)a.定义:模数的定义为齿距P与的比值,即m=P/b.模数的意义确定模数m实际上就是确定周节p,也就是确定齿厚和齿槽宽e。
模数m越大,周节p 越大,齿厚s和齿槽宽e也越大;模数越大,轮齿的抗弯强度越大。
(3)分度圆压力角(齿形角)αα:在分度圆上的受力方向线与被作用点速度方向线所夹锐角。
国家标准中规定分度圆压力角为标准值为20︒。
机械原理考研讲义九(齿轮机构和设计)
第十章齿轮机构及其设计10.1本章知识点串讲本章的重点有:齿轮的齿廓曲线;渐开线齿廓啮合传动的特点;渐开线各部分的名称、符号及标准齿轮几何尺寸的计算;渐开线直齿圆柱齿轮的啮合传动的条件;变位齿轮传动的基本理论及设计计算;斜齿轮﹑蜗轮蜗杆及圆锥齿轮传动的重点是它的啮合传动及设计计算的特殊点等。
【知识点1】齿轮的齿廓曲线一、渐开线的形成二、渐开线的性质当一直线沿半径为rb的圆作纯滚动时,该直线上任一点K的轨迹称为该圆的渐开线,该圆称为渐开线的基圆,直线x-x称为渐开线的发生线,角θK 称为渐开线AK段的展角。
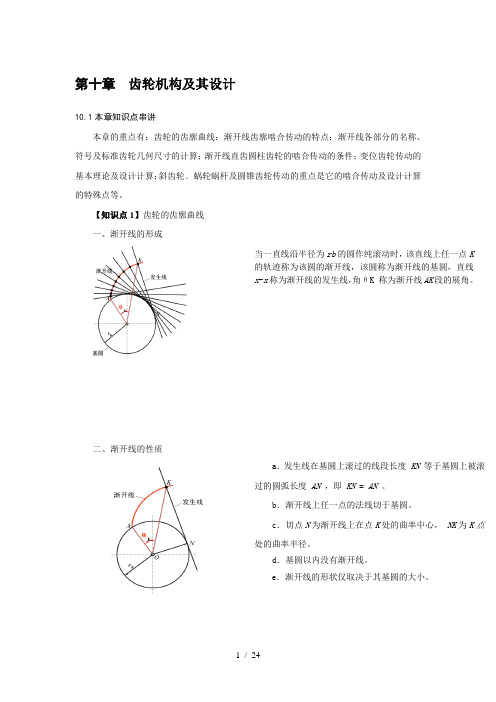
a.发生线在基圆上滚过的线段长度KN 等于基圆上被滚过的圆弧长度AN,即KN = AN。
b.渐开线上任一点的法线切于基圆。
c.切点N为渐开线上在点K处的曲率中心,NK为K点处的曲率半径。
d.基圆以内没有渐开线。
e.渐开线的形状仅取决于其基圆的大小。
f.同一基圆上任意两条渐开线间的法向距离相等。
【知识点2】渐开线齿廓啮合传动的特点Prr bωωOOKr 2 ′′r 1 NNK ′渐开线齿廓能保证定传动比i O P O Pr r 12122121===ωω渐开线齿廓传动的特点:1.啮合线为定直线,啮合点的轨迹线——内公切线、啮合线、公法线三线合一2.啮合角为常数,啮合角:啮合线与过节点P 处两节圆的内公切线之所夹锐角。
——它等于两齿轮在节圆上的压力角。
3.可分性【知识点3】渐开线各部分的名称、符号及标准齿轮几何尺寸的计算 一、齿轮各部分的名称及符号二、渐开线标准直齿圆柱齿轮的几何尺寸1.渐开线齿轮的五个基本参数:齿数(z),模数(m),分度圆压力角(齿形角),齿顶高系数ha *,径向间隙系数c *——亦称顶隙系数。
(1)齿数(z)齿数根据设计需要确定,如:传动比、中心距要求、接触强度等。
(2)模数(m)a. 定义:模数的定义为齿距P 与π的比值,即m= P/πb. 模数的意义确定模数m 实际上就是确定周节p ,也就是确定齿厚和齿槽宽e 。
机械原理考研讲义九
第十章齿轮机构及其设计10.1本章知识点串讲本章的重点有:齿轮的齿廓曲线;渐开线齿廓啮合传动的特点;渐开线各部分的名称、符号及标准齿轮几何尺寸的计算;渐开线直齿圆柱齿轮的啮合传动的条件;变位齿轮传动的基本理论及设计计算;斜齿轮﹑蜗轮蜗杆及圆锥齿轮传动的重点是它的啮合传动及设计计算的特殊点等。
【知识点1】齿轮的齿廓曲线一、渐开线的形成二、渐开线的性质当一直线沿半径为rb的圆作纯滚动时,该直线上任一点K的轨迹称为该圆的渐开线,该圆称为渐开线的基圆,直线x-x称为渐开线的发生线,角θK 称为渐开线AK段的展角。
a.发生线在基圆上滚过的线段长度KN 等于基圆上被滚过的圆弧长度AN,即KN = AN。
b.渐开线上任一点的法线切于基圆。
c.切点N为渐开线上在点K处的曲率中心,NK为K点处的曲率半径。
d.基圆以内没有渐开线。
e.渐开线的形状仅取决于其基圆的大小。
f.同一基圆上任意两条渐开线间的法向距离相等。
【知识点2】渐开线齿廓啮合传动的特点Prr bωωOOKr 2 ′′r 1 NNK ′渐开线齿廓能保证定传动比i O P O Pr r 12122121===ωω渐开线齿廓传动的特点:1.啮合线为定直线,啮合点的轨迹线——内公切线、啮合线、公法线三线合一2.啮合角为常数,啮合角:啮合线与过节点P 处两节圆的内公切线之所夹锐角。
——它等于两齿轮在节圆上的压力角。
3.可分性【知识点3】渐开线各部分的名称、符号及标准齿轮几何尺寸的计算 一、齿轮各部分的名称及符号二、渐开线标准直齿圆柱齿轮的几何尺寸1.渐开线齿轮的五个基本参数:齿数(z),模数(m),分度圆压力角(齿形角),齿顶高系数ha *,径向间隙系数c *——亦称顶隙系数。
(1)齿数(z)齿数根据设计需要确定,如:传动比、中心距要求、接触强度等。
(2)模数(m)a. 定义:模数的定义为齿距P 与π的比值,即m= P/πb. 模数的意义确定模数m 实际上就是确定周节p ,也就是确定齿厚和齿槽宽e 。
机械原理课程教案—齿轮机构及其运动设计

机械原理课程教案一齿轮机构及其运动设计一、教学目标及基本要求1.了解齿轮机构的类型和功用。
2.理解齿廓啮合基本定律。
3.了解渐开线的形成过程,掌握渐开线的性质、渐开线方程及渐开线齿廓的啮合特性。
4.深入理解和掌握渐开线直齿圆柱齿轮啮合传动需要满足的条件。
5.了解范成法切齿的基本原理和根切现象产生的原因、掌握不根切的条件。
6.了解渐开线直齿圆柱齿轮机构的传动类型及特点,学会根据工作要求和已知条件,正确选择传动类型,进行直齿圆柱齿轮机构的传动设计。
7.了解平行轴和交错轴斜齿圆柱齿轮机构传动的特点。
8.了解直齿圆锥齿轮机构的传动特点。
二、教学内容及学时分配第一节概述第二节齿廓啮合基本定律及齿廓曲线(第一、二节共1学时)第三节渐开线标准直齿圆柱齿轮的基本参数和几何尺寸计算(15学时)第四节渐开线标准直齿圆柱齿轮的啮合传动(1.5学时)第五节渐开线齿轮的加工与变位原理第六节渐开线变位齿轮传动(第五、六节共1学时)第七节渐开线直齿圆柱齿轮机构的运动设计(1学时)第八节斜齿圆柱齿轮机构(1学时)第九节直齿圆锥齿轮机构(1学时)三、教学内容的重点和难点重点:渐开线直齿圆柱齿轮机构的传动设计。
难点:渐开线齿轮的啮合传动。
四、教学内容的深化与拓宽非圆齿轮机构传动。
五、教学方式与手段及教学过程中应注意的问题充分利用多媒体教学手段,围绕教学基本要求进行教学。
在教学过程中应注意,本章的特点是名词、概念多,符号、公式多,理论系统型强,几何关系复杂。
要求学生学习时要注意清晰掌握主要脉络,对基本概念和几何关系应有透彻理解。
注意突出重点,多采用启发式教学以及教师和学生的互动。
六、主要参考书目1黄茂林,秦伟主编.机械原理.北京:机械工业出版社,2010 2申永胜主编.机械原理教程(第2版)清华大学出版社,20053孙桓,陈作模、葛文杰主编.机械原理(第七版).北京:高等教育出版社,20064朱景梓.渐开线齿轮变位系数的选择.北京:人民教育出版社,19825[俄)李特文著,卢占贤等译.齿轮啮合原理.上海科学技术出版社,1984七、相关的实践性环节齿轮参数测绘及齿轮加工原理八、课外学习要求自学非圆齿轮机构的传动特点及适用场合。
机械原理(第七版)优秀课件—第十章 齿轮机构及其设计

• 2.模数m不同于齿轮,有单独的标准。
• 3.ha*=1,c*=0.2
• 4.直径系数(蜗杆特性系数)
q和升角λ
• 1)q:为了减少刀具数量,
有利于标准化,…
• q=d1/ma1
d1=mq
• 6.转向
• 10.13.3 背锥与当量齿数
当量齿数的用途:1、用仿 形法加工齿轮时选刀号
• rv1=r1/cosδ1=mz1/2cosδ1
• 1、 轮齿啮合的过程
理论啮合线N1N2 实际啮合线B2B1
齿廓工作段
齿廓非工作段
• 2、渐开线齿轮连续传动的条件
例:ε=1.2 的几何表示
• 3、重合度εα的计算 • 1)外啮合εα=B2B1 /pb
2.不出现根切的最小齿数
线距离
加工标准齿轮不出现根切的条件是:刀具的齿顶线到节
• 10.10.4 斜齿轮传动的重合度
• 10.10.5 斜齿圆柱齿轮的当量齿数
• 短半轴b=r, 长半轴=r/cosβ • c点的曲率半径 ρ=a2/b =r/cos2β • 以ρ为rv,以mn为m,以αn为α作当量齿轮
• 10.11 螺旋齿轮传动
• 10.11.1 螺旋齿轮齿廓曲面形成的方法
• 10.11.2 几何关系
• 2.正确啮合条件
• mn1=mn2=mn
• 3.几何尺寸计算
αn1=αn2=αn=20°
a=r1+r2=mn(z1/cosβ1+ z2/cosβ2)/2 可调β1和β2来凑中心距
10.11.3 传动比i12及从动轮的转动方向
1.转向
轮2的转向不仅与轮1的转向有关,还与旋向有关。 • 2.传动比
机械原理齿轮机构及其设计PPT课件

6.2.2 渐开线及其特性
1.渐开线的形成
K
发生线
rK
渐A 开
K
K
o rb
B
线
基圆
要上素相一切:发基纯生圆滚线,发动在,生基发线圆生。
线上rb—任—一基点圆K在半基径圆, 平面内走过的轨迹AK
即为K 渐—开—线渐。开线展角。
13
2.渐开线特性
渐
1) BK AB;
开
2)渐开线上任一点的 线
K 发生线
rK
法线切于基圆; 3)B点是渐开线在K
点的曲率中心,BK
是渐开线在K点的
K K B A 基圆O rb
曲率半径;
4)渐开线形状取决于基圆大小 (直线
是渐开线的特例);
5)基圆以内无渐开线。
14
6.2.3 渐开线方程
F
K
vK
渐
K 发生线
开 rK
线 K K B
A
rb
O
基圆
1.压力角
齿廓上K点受力方向 (法线方向)与该点 速度方向之间所夹锐
角,用K表示。
15
F
K
vK
渐
K 发生线
开 rK
线 K K B
A
rb
O
基圆
2.方程(极坐标方程)
在△OBK中,由图可知
cos K
rb rK
tan
K
BK rb
AB rb
rb K K
rb
K=tanK-K=invK16
工程上常用invK表示K。 invK 称为渐开线函数。
渐开线极坐标方程如下:
规定:分度圆上的压力角为标准值。
cosrb或arccrbos
机械原理课件10 齿轮机构及其设计
§ 10-4 渐开线标准齿轮的基本参数和几何尺寸
1 齿轮各部分的名称和符号
基圆(db,rb);
ei
齿顶圆(da,ra);
齿根圆(df,rf);
任意圆(di,ri); 任意圆齿距pi ; 任意圆齿厚si;
ra rf
ri rb
任意圆齿槽ei;
pi(= si+ ei)
O
分度圆―设计基准圆(d,r);
分度圆齿距p, 分度圆齿厚s; 分度圆齿槽e,
O1 1
n
C1
1
C2 K
P
2
VP O1P 1 O2P 2
故两轮的传动比为:
i12
1 2
O2 P O1 P
2
O2
齿轮传动满足定传动比要求的条件是:P 在 连心线上为一定点。
i12
1 2
O2 P O1 P
齿廓啮合基本定律―两相互啮合传动的一
对齿轮,在任一位置时的角速度ω1/ω2
都等于节点P所分连心线 O1O的2 两段线段 r1’
(p = s+e)
齿顶高ha, , 齿根高hf 全齿高h;
rf ra
齿顶圆直径: da = d+2ha
齿根圆直径: df = d-2 hf
S=e
s e ha
hf h
r
rb
O
2 渐开线齿轮的基本参数 1)齿数:z
2)模数:m 分度圆圆周为:d = ZP
分度圆直径为:d zP
令: m P
则: d zm
齿轮机构的分类
1)按相对 运动形式分
平面齿轮 机构
空间齿轮 机构
外啮合齿轮传动
直齿轮
内啮合齿轮传动
齿轮齿条传动 平行轴斜齿轮
机械原理考研PPT讲解

提
1. 掌握定轴轮系、周转轮系、 复合轮系传动比的计算方法。 2. 了解行星轮系中均布行星 轮数目与各轮齿数、传动比 的关系。
要
3. 齿轮系的功用。
(a) 平行轴轮系
Hale Waihona Puke 图9F01 定轴轮系9.1
齿轮系是指由一系列齿轮所
组成的齿轮传动系统,简称轮系 。 9.1.1 定轴轮系
概
述
平面轮系
5 2 4 3
1
2
2" Z2''=20
H Z1=36 4 Z4=84
5
所组成轮系的传动比为
3 0
1 3
1 H i 4 H
H 14 H 1 H 4
Z 2 Z 4 28 84 3.267 Z1 Z 2 36 20
1 H 2 Z 2 Z3 i (1) 3 H Z1 Z 2
H 13
H 1 H 3
Z2
Z2'
3 0代入上式
1 H Z 2 Z 3 101 99 0 H Z 1 Z 2' 100 100
H Z1
Z3
1 9999 1 i1H 1 H 10000 10000
H 13
H 1 H 3
H
1 i1H 1 3 2 H
Z3
Z1
图9.3F02 外齿轮周 转轮系的传动比
H 1 iH1 1 2
可见,该周转轮系可以实现 范围很大的传动比 。
例4
图9.3F02所示的外啮合周转轮系中,若Z1=100, Z2=50,
Z2'=90, Z3=60,求系杆 H 与齿轮 1 之间的传动比 i1H。
机械原理第九章齿轮机构
K A
rb
K A
rb
K
A rb
K
A rb
*发生线KB在基圆上纯滚动时,发生线 上K点的轨迹——渐开线(involute)
渐开线在起始
点A的向径
K
ቤተ መጻሕፍቲ ባይዱ
ri
A i
O rb
渐开线在K点的向径
*展角 (evolving angle)
B i—渐开线起始点A与
K点两向径间的夹角
二、渐开线的特性
K
ri
A
6 0.00 03845 04008 04175
7 0.00 06115 06337 06564 8 0.00 09145 09435 09732 9 0.00 13048 13416 13792
0.0067985 10 0.00 17941 18397 18860
11 0.00 23941 24495 25057 12 0.00 31171 31832 32504 13 0.00 39754 40534 41325 14 0.00 49819 50729 51650 15 0.00 61498 62548 63611
第十章 齿轮机构
(Gear Mechanism)
第一节 概述
齿轮机构的类型和特点
齿轮机构是现代机械中应用最为广泛的一种传动机构, 可以用来传递空间任意两轴间的运动和动力。传动准确、平 稳、机械效率高、寿命长、工作安全可靠。
CNC机的零件处理设备
自动化包装机器
自动化电子元件组合机
标签印刷机
自动化生产线的组件
i
K
ri
A
rb B
O
i
K
ri
A O
B rb
机械原理第九章齿轮机构讲解

齿轮齿条机构
(2)斜齿圆柱齿轮(helical gear)
外啮合齿轮机构 内啮合齿轮机构
齿轮齿条机构
(3)人字齿轮(double-helical gear)
由螺旋角相反、大小 相等的两个斜齿圆柱 齿轮拼接而成。
二、空间齿轮机构
两齿轮的轴线不平行 相对运动为空间运动
(1)圆锥齿轮机构(bevel gear mechanism)
节曲线是齿轮的动瞬心线,齿轮的啮 合传动相当于其两节曲线作无滑动的 纯滚动。
点P为节点
分析:
K1 K
K2
P
O1
O2
i12
1 2
O2 P O1P
(1)节点P为中心线上的一个固定点的情况
(2)节点P在中心线上按一定规律移动的情况
二、共轭齿廓的形成
凡能满足齿廓啮合基本定律的一对齿廓称为共轭齿廓。
共轭齿廓啮合时,两齿廓在啮合点相切,其啮合点的公 法线通过节点P。理论上,只要给定一齿轮的齿廓曲线, 并给定中心距和传动比i12,就可以求出与之共轭的另一 齿轮的齿廓曲线。 共轭齿廓可以用包络线法、齿廓法线法或动瞬心线法等 方法求得。
k
inv K
=
tan K
K
为使用方便,有些书将不同压力角的渐开线函数
invK=tanK-K 以表格的形式给出,K以度为单位,而 θK=invK 的单位为弧度。
一、渐开线的形成
发生线(generationg line) KB
B
K
A O
rb
基圆(base circle)
K A
rb
K A
rb
K A rb
B
O rb
*1)KB=AB
n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十章齿轮机构及其设计10.1本章知识点串讲本章的重点有:齿轮的齿廓曲线;渐开线齿廓啮合传动的特点;渐开线各局部的名称、符号及标准齿轮几何尺寸的计算;渐开线直齿圆柱齿轮的啮合传动的条件;变位齿轮传动的根本理论及设计计算;斜齿轮﹑蜗轮蜗杆及圆锥齿轮传动的重点是它的啮合传动及设计计算的特殊点等。
【知识点1】齿轮的齿廓曲线一、渐开线的形成二、渐开线的性质当一直线沿半径为rb的圆作纯滚动时,该直线上任一点K的轨迹称为该圆的渐开线,该圆称为渐开线的基圆,直线x-x称为渐开线的发生线,角θK 称为渐开线AK段的展角。
a.发生线在基圆上滚过的线段长度KN 等于基圆上被滚过的圆弧长度AN,即KN = AN。
b.渐开线上任一点的法线切于基圆。
c.切点N为渐开线上在点K处的曲率中心,NK为K点处的曲率半径。
d.基圆以内没有渐开线。
e.渐开线的形状仅取决于其基圆的大小。
f.同一基圆上任意两条渐开线间的法向距离相等。
【知识点2】渐开线齿廓啮合传动的特点Prr bωωOOKr 2 ′′r 1 NNK ′渐开线齿廓能保证定传动比i O P O Pr r 12122121===ωω渐开线齿廓传动的特点:1.啮合线为定直线,啮合点的轨迹线——内公切线线、公法线三线合一2.啮合角为常数,啮合角:啮合线与过节点P 处两内公切线之所夹锐角。
——它等于两齿轮在节圆上角。
3.可分性【知识点3】渐开线各局部的名称、符号及标准齿轮几何尺寸的计算 一、齿轮各局部的名称及符号二、渐开线标准直齿圆柱齿轮的几何尺寸1.渐开线齿轮的五个根本参数:齿数(z),模数(m),分度圆压力角(齿形角),齿顶高系数ha *,径向间隙系数c *——亦称顶隙系数。
〔1〕齿数(z)齿数根据设计需要确定,如:传动比、中心距要求、接触强度等。
〔2〕模数(m)a. 定义:模数的定义为齿距P 与π的比值,即m= P/πb. 模数的意义确定模数m 实际上就是确定周节p ,也就是确定齿厚和齿槽宽e 。
模数m 越大,周节p 越大,齿厚s 和齿槽宽e 也越大;模数越大,轮齿的抗弯强度越大。
〔3〕分度圆压力角(齿形角)αα:在分度圆上的受力方向线与被作用点速度方向线所夹锐角。
国家标准中规定分度圆压力角为标准值为20︒。
〔4〕齿顶高系数(h a *) 齿顶高:h a = h a * m轮齿与齿槽四圆:齿顶圆(ra ,da) 齿根圆(rf ,df)基 圆(rb ,db) 分度圆(r ,d)——设计基准周向度量:齿厚(s) 齿槽(e)周节(p=s+e) 径向度量:齿顶高(ha)齿根高(hf) 全齿高(h)〔5〕径向间隙系数(c*)轮齿间的径向间隙:c = c*m齿顶高系数h a *和径向间隙系数c*均为标准值。
正常齿标准:h a * = 1,c* 2.渐开线标准直齿圆柱齿轮的几何尺寸名称代号公式分度圆直径 d d1=mz1 ,d2=mz2基圆直径db db1=mz1 cosα,db2=mz2 cosα齿顶高ha ha = ha*m齿根高hf hf = ( ha* + c* ) m齿顶圆直径da da1= d1+2 ha = m (z1 +2 ha* ),da1= d1+2 ha = m (z1 ±2 ha* )齿根圆直径df df1= d1 -2 hf = m (z1 -2 ha* -2c* ),df1= d1 + 2 hf = m (z1 +2 ha* +2c* )周节p P=πm齿厚s s=πm/2基圆周节pb Pb=πm cosα中心距 a a=m(z1 ±z2)/2【知识点4】渐开线直齿圆柱齿轮的啮合传动的条件一、一对渐开线齿轮正确啮合的条件渐开线齿轮正确啮合的条件:两齿轮的模数和压力角对应相等。
二、齿轮正确安装条件1. 无齿侧间隙啮合条件:s1’=e2’;e1’=s2’2. 保证两轮的顶隙为标准值:顶隙为标准值,即:c = c*m按标准中心距安装时,两齿轮的分度圆相切,即此时两轮的分度圆与节圆重合。
3. 啮合角与中心距啮合角α′:节点P处圆周速度方向与啮合线N1N2之间所夹锐角a cosα=a’cosα′三、啮合传动过程及连续条件如以下图,两齿轮在B2点开始进入啮合,B1点脱离啮合。
B1B2实际上是理论啮合线N1N2的一段,称为实际啮合线。
N1,N2称为啮合极限点。
为了两齿轮能够连续地传动,必须保证在前一对轮齿尚未脱离啮合时,后一对轮齿能及时进入啮合。
为此,B1B2应大于齿轮的法向齿距Pb。
故连续传动的条件为:重合度ε=B1B2/p b>1 (其中为实际啮合线的长度,p b为基圆周节)ε值越大,承载能力越高,连续性和平稳性越好。
重合度的计算公式:式中α′为啮合角,z1,z2及αa1,αa2分别为齿轮1,2的齿数及齿顶圆压力角。
重合度与模数无关,而随着齿数的增多面加大。
【知识点5】根切现象及变位齿轮的根本概念 一.根切现象及其防止方法 1. 根切现象及产生原因根切现象:因某种原因,轮齿根部的渐开线被切削掉的现象。
用范成法加工渐开线齿轮过程中,有时刀具齿顶会把被加工齿轮根部的渐开线齿廓切去一局部,这种现象称为根切。
根切的危害:根切将削弱齿根强度,甚至可能降低传动的重合度,影响传动质量。
2. 最小不根切齿数V=ωrOrN 1 r aωBPr b Bh a m* 轮坯分度圆刀具齿顶线不产生根切条件:PN 1≥ PB 2 PN 1= r sin αPB 2= ha*m / sin α所以有:r sin α≥ ha* m / sin α mz sin α/2≥ha*m/sin α 即:z ≥ 2ha* / sin 2α当ha*=1,a = 20º时,z min =17补充:证明重合度的计算公式3. 防止根切的方法——变位齿轮的提出 1) 提高啮合极限点N 1 2) 降低刀具齿顶线——正变位 与此相反,还有所谓负变位。
4.变位齿轮的几何尺寸假设用齿条形刀具切制齿数Z ≤Zmin 的变位齿轮时,当刀具的齿顶线恰好与被切齿轮的啮合极限点N1重合时,即刚好不发生根切,其刀具的最小变位系数为x min =ha *(z min -z)/z minN 1 POαB 2分度圆基圆I K J m π/2h a m* xm对于正变位齿轮有:s = pm/2 + 2KJ = (p/2 + 2xtg α) me = pm/2 - 2KJ = (p/2 - 2xtg α) mhf = ha*m+ c*m – xm = (ha*+ c*–x ) mha= ha*m+ xm = (ha*+ x ) mxmxmtg α α IK J 补充:证明最小变位系数公式由以上可得:x ≥ha *(z min -z)/z min【知识点6】变位齿轮传动一、变位齿轮传动问题的提出1. 防止根切产生,以减小机构尺寸2. 提高小齿轮承载能力,降低小齿轮根部磨损,实现“同时失效〞。
变位齿轮的承载能力可比标准齿轮提高20%以上。
3. 凑配中心距二、变位齿轮传动变位齿轮传动中心距确实定也应满足无侧隙啮合和顶隙为标准值这两方面的要求。
要满足无侧隙啮合,要求其一轮在节圆上的齿厚应等于另一轮在节圆上的齿槽宽,由此可推得无齿侧隙啮合方程:inv a′= 2tan a(x1+x2) / (z1+z2) + inv a两轮作无侧隙啮合时的中心距为a′,它与标准中心距之差为ym,y称为中心距变动系数,即a′=a + ym〔满足无齿侧间隙的中心距〕而所以为保证两轮之间具有标准的顶隙c=c*m,那么两轮的中心距应等于a″= r a1 + c + r f2 = r1 +(h*a + x1 ) m+ c*m+ r2 –(h*a + c* - x2 ) m= a + (x1 + x2 ) m〔满足标准径向间隙的中心距〕由此可得,如果y= x1 + x2,就可以同时满足上述两个条件。
但是经验说明:只要x1 + x2 ≠ 0 ,总是x1 +x2 > y。
工程上的解决方法是:两轮按无侧隙中心距a′=a + ym安装,而将两轮的齿顶高个减短△ym,以满足标准顶隙要求。
△y称为齿顶高降低系数,其值为△y =x1 + x2 -y。
这时有齿顶高为h a= h a*m+ xm -△ym= (h a*+ x -△ym ) m变位齿轮传动的特性与变位系数和x∑=(x1+x2)的大小及变位系数x1,x2分配有关。
根据x∑,x1,x2的数值,可把齿轮传动分为三种根本类型。
1) 标准齿轮传动a. 条件x∑= x1 + x2 = 0 ,且:x1 = x2 = 0b. 特点这是变位齿轮传动的特例(变位系数等于零);其啮合α′角等于分度圆压力角α,中心距a′等于标准中心距a。
齿数条件:z >z min。
这类齿轮传动设计简单,使用方便,可以保持标准中心距,但小齿轮的齿根较弱,易磨损。
2)等变位齿轮传动〔又称高度变位齿轮传动〕a. 条件x∑= x1 + x2 = 0,但:x1 = -x2≠0b. 特点由于它与标准齿轮传动一样,x∑=0,x1=-x2,因此,α‘=α,a’=a,y=0,Δy=0与标准齿轮相比,其啮合角α‘=α不变,仅仅齿顶高和齿根高发生了变化,即:h a1=(h*a+x1)m,h f1=(h*a+c*-x1)m,故称之为高度变位齿轮传动。
对于等变位齿轮传动,为有利于强度的提高,小齿轮用正变位,大齿轮用负变位,使大小齿轮的强度趋于接近,从面使齿轮的承载能力提高。
齿数条件:z1+z2≥2z min。
3)不等变位齿轮传动〔又称角度变位齿轮传动〕条件:x∑=x1+x2≠0由于x∑=x1+x2≠0,因而其啮合角α‘不再等于标准齿轮的啮合角α,故称为角度变位齿轮传动。
它又可分为两种情况:a. 正传动x∑ =x1+x2 > 0α‘> α,a’> a,y> 0 ,Δy> 0,这种齿轮传动的两分度圆不再相切而是别离ym。
为保证标准径向间隙和无侧隙啮合,其全齿高应比标准齿轮缩短△ym。
正传动的主要优点是:可以减小机构尺寸,减轻轮齿的磨损,提高承载能力,还可以配凑并满足不同中心距的要求。
齿数条件:两齿轮齿数均可小于17。
正传动的缺点是重合度减小较多。
b. 负传动x∑=x1+x2< 0此时α‘< α,a’< a,y< 0,但Δy> 0;这种齿轮传动的两分度圆相交,它的主要优点是可以配凑不同的中心距,但是其承载能力和强度都有所下降。
一般只在配凑中心距或在不得已的情况下,才采用负传动。
齿数条件:z1+z2>34负传动的优缺点正好与正传动相反,即其重合度略有增加,但轮齿的强度有所下降,所以负传动只用于配凑中心距这种特殊需要的场合。
从机械原理的角度来看,变位齿轮传动设计问题可分为以下两类:1〕中心距的设计。