《运筹学》8关键路线法
自考运筹学基础名词解释(整理)
自考运筹学基础名词解释(整理)预测:就是对未来的不确定的时间进行估计或判断。
宏观经济预测:是指对整个国民经济范围的经济预测,如国民收入增长率微观经济预测:是指对单个经济实体的各项经济指标及其所涉及到国内外市场经济形势的预测,如市场需求。
运筹学:缩写OR,是利用计划方法和有关多学科的要求。
把复杂功能关系。
表示成数学模型,其目的是通过定量分析为决策和揭露新问题提供数量根据。
定性决策:基本上根据决策人员的主观经验或感受到的感觉或只是而制定的决策。
定量决策:借助于某些正规的计量方法而作出的决策。
混合性决策:必须运用定性和定量两种方法才能制定的决策。
科技预测:分为科学预测和技术预测。
科学预测包括:科学发展趋势和发明等。
技术预测包括:新技术发明可能应用的领域社会预测:研究社会发展有关的问题,如人口增长预测,社会购买心理的预测等。
军事预测:研究与战争、军事有关的问题。
定性预测:是指利用直观材料,依靠个人经验的主观判断和分析能力,对未来的发展进行预测,又称之为直观预测定量预测:根据历史数据和资料,应用数理统计方法来预测事物的未来的方法。
专家小组法:是在接受咨询的专家之间组成一个小组,面对面地进行讨论与磋商,最后对需要预测的课题得出比较一致的意见线段:两个关键结点之间的一个活动或两个关键结点之间的几个活动连续相接的连线。
时间序列:就是将历史数据按时间顺序排列的一组数字序列。
时间序列分析法:又称外推法,就是根据预测对象的这些数据,利用数理统计方法加以处理,来预测事物的发展趋势。
回归分析法:又称回归模型预测法、因果法。
就是依据事物发展的内部因素变化的因果关系来预测事物未来的发展趋势,它是研究变量间相互关系的一种定量预测方法一元线性回归:它是描述一个自变量与一个因变量间线性关系的回归方程,又称单回归。
多元线性回归:它是描述一个因变量与多个因变量间线性关系的回归方程,又称复回归。
最小二乘法:是指寻求使误差平方总和为最小的配合趋势线的方法决策:就是针对具有明确目标的决策问题,经过调查研究,根据实际与可能,拟定多个可行方案,然后运用统一的标准,选定最佳方案的全过程。
运筹学网络计划
A
拆迁
/
2
B
工程设计
/
3
C
土建工程设计
B
2.5
D
采购设备
B
6
E
厂房土建
C、A
20
F
设备安装
D、E
4
G
设备调试
F
2
A(2)
1
B (3)
2
C (2.5)
3
D (6)
E (20)
G (2)
F (4)
4
5
6
用箭秆删除法标号(保证箭尾号大于箭头号)
工序
A
B
C
D
EFGHIJKL
M
N
紧前工序
_
_
_
_
D
E
A
F
G
B
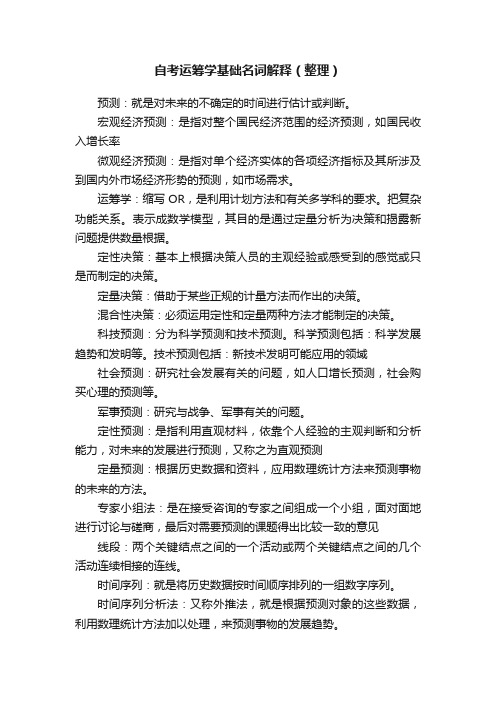
由本例可见:关键工序 头尾皆有
=
关键工序时间之和=工期T。
,但反之未必。
二、工程完工期的概率分析
(计划评审技术PERT)
1、PERT与 CPM的区别:
CPM工序时间是确定的
工程工期的概率分析是是时间不确定情况下PERT
的主要工作
确定平均工序时间的三点估计法:
设工序最乐观时间为aij,最悲观时间为bij,最可能时间为m ij ,
t ij
a ij 4m ij bij
- 给任意点 i 标 Li ,
Li=Min{以 i 为箭尾的各箭之 “箭头
- 箭长tij”}
16
(3)求关键路(用标号法)
6
2
8
0
0 1
3
B '(0)
3
2)计算各工序 i
运筹学复习考点

整理课件
59
• (4)动态规划的基本方程是将一个多阶段的决策问题转化为一系列具 有递推关系的单阶段决策问题。
• 正确。 • (5)建立动态规划模型时,阶段的划分是最关键和最重要的一步。 • 错误。 • (6)动态规划是用于求解多阶段优化决策的模型和方法,这里多阶段
• 错误。
• 唯一最优解时,最优解是可行域顶点,对应基本可行解;无穷多最优 解时,除了其中的可行域顶点对应基本可行解外,其余最优解不是可 行域的顶点。
• (12)若线性规划问题具有可行解,且其可行域有界,则该线性规划 问题最多具有有限个数的最优解。
• 错误。
• 如果在不止一个可行解上达到最优,它们的凸组合仍然是最优解,
结束时间不允许有任何延迟。 • 正确。 • (10)网络关键路线上的所有作业,其总时差和自由时差均为零。 • 正确。 • (11)任何非关键路线上的作业,其总时差和自由时差均不为零。 • 错误。
整理课件
57
• (12)若一项作业的总时差为零,则其自由时差一定为零。 • 正确。 • (13)若一项作业的自由时差为零,则其总时差比为零。 • 错误。 • (14)当作业时间用a,m,b三点估计时,m等于完成该项作业的期
既可以是时间顺序的自然分段,也可以是根据问题性质人为地将决策 过程划分成先后顺序的阶段。
• 正确。
整理课件
60
•
整理课件
61
此课件下载可自行编辑修改,供参考! 感谢您的支持,我们努力做得更好!
整理课件
62
5 3 6 -6 0
0
801001
5
14 1 2 0 0 0
-6
4 0 1 -1 1 0
《运筹学(胡运权)》第五版课后习题答案
可知购进原材料15个单位为宜。
4.1
a)设yi= 1第i组条件起作用
0第i组条件不起作用
x1+x2≤2-(1-y1)M M—充分大正数
2x1+3x2≥5+(1-y2)M
y1+y2=1
y1,y2=0或1
b)设yi= 1第i组条件起作用
0第i组条件不起作用
x=0y1
x=3y2
X2 1.000000 2.000000 INFINITY
X3 4.000000 1.000000 1.500000
X1,X2,X3 0.000000 0.000000 INFINITY
RIGHTHAND SIDE RANGES
ROW CURRENT ALLOWABLE ALLOWABLE
RHS INCREASE DECREASE
0.03(a2+b2+c1)-0.06(a3+b3)-0.11(a4+c1)-0.05a5
=0.95a1+0.97a2+0.94a3+1.5b3+2.1c1-0.05b1-0.11a4-0.05a5
s.t.
5a1+10b1≤6000
7a2+b2+12c1≤10000
6a3+8a3≤4000
4a4+11c1≤7000
5.3c
因为使mind1-,故在x1+x2=40的右侧,若使mind4+,则在x1+x2=50的左侧,即阴影区域,因为在阴影部分无法使2d2-+d3-最小,故比较E(20,30),F(24,26),E点:d2-=4,d3-=0 min2d2-+d3-=8,F点:d2-=0,d3-=4, min2d2-+d3-=4,故选F点
运筹学计划评审方法和关键路线法PPT资料(正式版)

• 时差又称宽裕时间:不影响如期完成任务的条件下,各道工序可以机 动使用的一段时间。
• 总时差R(i, j):不影响其紧后工序最迟必须开工的前提下,本工序最 早可能完工时间可以推迟的时间。
▪ R(i, j)= tLS(i, j) -tES(i, j) = tLF(i, j) -tEF(i, j) = tL( j) -tE(i) -t(i, j) • 单时差r(i, j):不影响其紧后工序最早可能开工的前提下,本工序最早
13 13 13
222 每天只有13台设备可用,计划10天完成,试合理安排生产进度 编号时不允许箭头编号小于箭尾编号。
工程费用最低的完工时间(最低成本日程) tE(j)等于从始点开始到本结点的最长路线上各道工序时间之和。 作业最早可能开工时间等于其箭尾事项的最早时间。
1 PERT网络图 工序时间的三种可能估计:
• 不允许出现缺口与回路
▪ 网络图中只能有一个始点和一个终点,使得自网络图的始点经由任何路径都 可以到达终点。
• 虚工序
▪ 虚工序是为了表达相邻工序之间的逻辑关系而虚设的工序。 ▪ 不消耗时间、费用和资源,一般用虚箭线表示。
• 方向的规定
▪ 网络图是有方向的,工序应按工艺流程顺序或工作逻辑关系从左向右排列。
• 路线:指PERT网络图中,从最初事件到最终事件的由各项作业连贯组成的
一条路。 • 关键路线:指从最初事件到最终事件路条可以有不同的路,各项作业累计时
间最长的那条路。
• 网络图
▪ 由工序、事项及时间参数所构成的有向图即为网络图。 ▪ 箭线表示工序,结点为工序间相互关系的网络图,称箭线式网络 ▪ 结点表示工序,箭线为工序间相互关系的网络图,称结点式网络
▪ 等于它的箭头事项的最迟时间减去本作业的作业时间 tLS(i, j)= tL( j) - t(i, j)
运筹学名词解释

运筹学名词解释1运筹学2定性决策3定量决策4混合性决策5预测6宏观经济7微观经济预测8定性预测9定量预测10时间序列预测法11回归分析法12最小二乘法13决策14自然状态15现实或乐观主义16条件利润17存货台套法18经济订货量(EOQ)19前置时间的需求量20安全库存量21规划22线性规划23变量24目标函数25约束条件26单纯形法27可行解区28松弛变量29运输问题30网络计划技术31计划评核技术(PERT) 32关键路线法(CPM) 33网络图34箭线式网络图35节点式网络图36活动37虚活动38结点39线路40关键线路41路长42任务的分解43作业时间44单一时间估计法45三种时间估计法46最早开始时间47最早完成时间48最迟完成时间49最迟开始时间50线段时差51线路52优化53时间优化54时间与资源优化55时间与成本优化56直接费用57间接费用58正常时间59极限时间60马尔柯夫分析61盈亏分析62盈亏平衡点63固定成本64可变成本65马尔柯夫过程66预付成本67计划成本68线性盈亏分析模型69边际收益70边际收益率71生产能力百分率72模拟73分析解74蒙特卡洛方法75随机数76均匀随机数77随机变量78 ABC分析法79 控制性决策80 最大最大决策标准81 再订货点82 改进路线83 概率向量84 专家小组法85 现实主义决策标准86 常规性决策87 最小最大遗憾值决策标准88 箭线式网络网的活动89 概率矩阵90 最大最大决策标准91盈亏平衡分析92改进路线93阶石法94改进指数95因果法96多元线性回归97闭合回路法98技术预测99不确定条件下的决策100后悔值101阶石法中的改进指数102计划性决策103树104单渠道随机排队法105订货费用106工装调整费107保管费用108最短路线109修正分配法110缺货111可行基解112关键结点113网络的流量问题114网络的路线问题115离散随机变量116特殊性决策117线性规划问题的最优解118平衡概率矩阵:119一元线性回归120表上作业法:121活动的极限费用:122社会预测123订货的前置时间:124可行性研究:125线性规划模型的约束条件:126风险条件下的决策127直接费用增长率128相关关系129单纯形法的判别指数:130转移概率131科学预测132函数关系133置信区间134相关检验135最大最小决策标准136最大期望收益值标准:137最小期望损失值标准:138多阶段决策139A类存货台套140B类存货单元141C类存货单元142平均库存量:143平均库存额:144表格计算法(或称列表法)145图解法:146数学方法:147结点时差:148活动时差(工序时差):149线路时差:150计划性能法:151系统模拟的过程152状态153状态转移过程154状态转移概率155标准概率矩阵156终极状态概率157总偏差158回归偏差159剩余偏差1运筹学:运筹学利用计划方法和有关多学科的要求,把复杂功能关系表示成数学模型,其目的是通过定量分析为决策和揭露新问题提供数量根据。
运筹学计划评审与关键线路
1
2
A(9)
3
4
5
6
7
8
9
10
11
B(3) 1
2
E(8)
C(6) 3 F(7) 4 G(2) 5 H(1) 6
D(4)
22
24
10
2
1
6-2 时间参数与关键线路
一,网络图的时间参数计算
1,工作最早开始时间(ES) ES i j = max{ES k i + t k i } 2,工作最迟开始时间(LS) LS i j = min LS j k t i j 3,工作最早完成时间(EF) EFi j = ES i j + t i j 4,工作最迟完成时间(LF) LFi j = LS i j + t i j
F 5 A 5 B 1 2 C 3 D 2 E 6
5
H
3 G 5
1
3
4
6
T=16
例1:求时间参数
19 2 88 12 11
3C
A
1
D 2
1111 4 0 0
H
5
ES LS TF FF
01 10
1
E
55
6
1113 2 0
0G
工序 G H I K L M
E
紧前工序 工序时间 2 B,C ----5 2 A,L 1 F,I 7 B,C C 3
M 3 B 4 G 4 2 L 7 6 5 A 3
5
F 7 8 9 I 5 D 3 5 10
K 1
11
1 2 3 4 5 6 7 8 9 1 1 1 1 1 1 1 1 1 1 2 0 1 2 3 4 5 6 7 8 9 0
运筹学复习题——考试题

《运筹学》复习题一、填空题( 1 分× 10=10 分)1.运筹学的主要研究对象是(组织系统的管理问题)。
2.运筹学的核心主要是运用(数学)方法研究各种系统的优化。
3.模型是一件实际事物或现实情况的代表或抽象。
4.通常对问题中变量值的限制称为(约束条件),它可以表示成一个等式或不等式的集合。
5.运筹学研究和解决问题的基础是(最优化技术),并强调系统整体优化功能。
6.运筹学用(系统)的观点研究(功能)之间的关系。
7.运筹学研究和解决问题的优势是应用各学科交叉的方法,具有典型综合应用特性。
8.运筹学的发展趋势是进一步依赖于计算机的应用和发展。
9.运筹学解决问题时首先要观察待决策问题所处的环境。
10.用运筹学分析与解决问题,是一个科学决策的过程。
11.运筹学的主要目的在于求得一个合理运用人力、物力和财力的最佳方案。
12.运筹学中所使用的模型是数学模型。
用运筹学解决问题的核心是(建立数学模型),并对模型求解。
13.用运筹学解决问题时,要分析,定义待决策的问题。
14.运筹学的系统特征之一是用系统的观点研究功能关系。
15.数学模型中,“ . ”表示约束。
16.建立数学模型时,需要回答的问题有性能的客观量度,可控制因素,不可控因素。
17.运筹学的主要研究对象是各种有组织系统的管理问题及经营活动。
18. 1940 年 8 月,英国管理部门成立了一个跨学科的11 人的运筹学小组,该小组简称为OR。
19.线性规划问题是求一个( 线性目标函数), 在一组 ( 线性约束 ) 条件下的极值问题。
20.图解法适用于含有两个变量的线性规划问题。
21.线性规划问题的可行解是指满足所有约束条件的解。
22.在线性规划问题的基本解中,所有的( 非基变量 ) 等于零。
23.在线性规划问题中,基可行解的非零分量所对应的列向量线性无关24.若线性规划问题有最优解,则最优解一定可以在可行域的顶点(极点)达到。
25.线性规划问题有可行解,则必有基可行解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t ( i , n) 总完工期(或 ( i , n) t EF ) LF t LS ( i , j ) mint LS ( j , k ) t ( i , j ) k t LF ( i , j ) t LS ( i , j ) t ( i , j )
方差为:
a 4m b t (i , j ) 6
ba t 6
2 2
2. 结点(事项)的时间参数确定: (1)节点的最早时间:t E ( j ) 它表明以它为始点的各工作最早可能开始的时间, 也表明以它为终点的各工作的最早可能完成时间。
等于从始点结点到该结点的最长路线上所有工作的 工时总和。
错误
正确
网络图中不能出现循环回路
错误
节点编号时,按照矢线箭头的指向,升序 排号,保证节点序号先后关系保持一致。
应将各作业的工时数据标注在表示该作业 的矢线的下面。 正确使用虚工序(不消耗资源,一般表示 平行工作关系)
三、PERT图的绘制步骤
先画草图,再修改后变成规范图,步骤如下: @ 根据活动清单中规定的关系,将活动代号栏所有的 活动逐次地画在网络图上,从左到右 @ 理顺活动的紧前、紧后关系,没有紧后活动的活动 所对应的箭线汇集在终止结点上 @ 草图绘制完成后,将序号标在结点上,将活动代号 和时间标在箭 线上 @ 检查无误后,将草图绘制成规范图 •
A 1
15
G 1
D
2
C 14 4 5
10
例:建筑一幢房屋,施工顺序如上表所示,要求计 算工程周期及关键路线
序 号 1 2 3 4 5 6 7 8 施工项目 清理地面 打地基 砌墙 安装电线 粉刷 画图案 室内工程 上屋顶 所需时间 (月) 1 4 4 3 4 6 4 5 工序代号 紧前项 目 A B A B C D D D,H E C F G E H C
递推公式为:
t ) t L ( n) 总工期(或E ( n) t ( i ) mint ( j ) t ( i , j ) L L j
3. 工作的时间参数确定: 1。作业的最早可能开始时间(ES) 是指作业最早可能开始的时间,是它的各项紧前 作业最早结束的时间中最大的一个。 2。作业的最早可能结束时间(EF) 是指作业按最早开工时间开始所能达到的完工时间。
60-70年代我国开始应用和推广。 钱学森、华罗庚等都曾为此做 了大量工作。
华罗庚的例子:有客来访,要 请他饮茶,于是要做几件事: 洗茶杯、洗杯盖、烧开水、泡 茶到端茶。
本问题的几道“工序”有次序, 时间: 洗杯盖 2 烧水5 泡茶2 洗杯1 虚0 端茶0.5
客来沏茶
第一节
PERT网络图
一、网络图构成
递推公式:
t E (1) 0 t ( j ) max t ( i ) t ( i , j ) E E i
t E (n) :整个工程的总最早完工期
(2)节点的最迟时间:t L ( j ) 它表明在不影响任务总工期的条件下,以它为始点 的各工作最迟必须开始的时间, 也表明以它为终点的各工作的最迟必须完成时间。 由于,一般都把任务的最早完工时间作为任务的总 工期,所以结点的最迟时间
4. 时差:
按性质可以分为作业的总时差R(i,j)和作业的自由 时差F(i,j)。 总时差:在不影响任务总工期的条件下,某工作(i,j) 可以延迟其开工时间的最大幅度。 这是网络上 多 于一项作业共同拥有的机动时间,并非为某项作业单 独拥有。
R( i , j ) t LF ( i , j ) t EF ( i , j ) t LS ( i , j ) t ES ( i , j )
工作(i,j)的总时差等于它的最迟完工时间与最早完 工时间的差,也等于它的最迟开工时间与最早开工时 间的差。
自由时差:不影响它的各项紧后作业最早开工时间 条件下,该项作业可以推迟的开工时间的最大限度, 它是一项作业独自拥有的机动时间。
F ( i , j ) min{t ES ( j , k )} t ES ( i , j ) t ( i , j )
24
6 2
23 23
23
00
7
23
0
(13) [13]
10 0 13
8 0) (
2 1
( 0)
10 1 25 32 5 26 1 (1) 8
9
31
310
( 0)
32
说明:1,由关键路线的意义知,这条线在时间上没 有回旋余地,即每个关键工作应满足“最早开工时间 =最迟必须开工时间”,而非关键路线则有富裕时间。 所以,总时差为0的工作链就是关键路线。
五、PERT图的计算
1.工作时间tij的确定:
确定型: 利用已知的工时定额资料给出。 概率型:对于开发性任务,或对工作所需的工时 难以准确估计时,可采用三点时间法来确定工作 的工时。
设:a是最乐观的时间估计值,m是最可能的估计值, b是最悲观的时间估计值
则实际计算中,完成一项作业的期望工时t(i,j)按如 下公式计算:
F ( i , j ) min{t ES ( j , k )} t ES ( i , j ) t ( i , j )
k
4 0
0
0 0
( 0)
2 4
3
4
( 0)
6 0
3
0
1
4
20 5 11(11) 4 18 (0) 15 18
10 10
8
0
( 0)
30
20 20
(0) 6 (6) 29 ( 0)
二、绘制PERT图的原则
PERT图的开始节点与结束节点均应是唯一的。
如果在实际工作中发生不吻合时,应将没有紧前作业的结 点用虚箭头线同网络始点事项连接起来,将没有后续事项 的结点用虚箭头同终点事项边接起来。 2 2
1
3
4 (错误)
5
6
1
3
4 正确
5
6
在相邻的两个节点之间,最多只能有一条箭线相连。 进入某一个结点的箭线可以有多条,但其它任何 结点直接连接该结点的箭线只能有一条。 两个相邻结点间只允许有一条箭线直接相连。若 有平行活动,可引入虚线以保证这一规则不被破 坏。
第八章 计划评审方法 和关键路线方法
网络计划方法的产生
起源:网络计划方法是项目计划管理的重要方法。它起 源于美国。当时,有两种网络计划方法:关键路线法和 计划评审技术。 1957年,美国杜邦化学公司用关键路线法(Critical Path Method)。当年就节约100万美元,为该公司用于 该项目研究费用的5倍以上。 1958年,美国海军当局在研制北极星导弹潜艇时, 第一次采用了BuzzAllen提出的计划评审技术(Program Evaluation and Review Technique),主要承包商200多 家,转包商10000家。23个系统网络,每两周检查一次, 原定6年,提前两年完成,节约经费10—15%。 60年代耗时11年阿波罗登月计划3000亿$,42万人,2 万家公司,120所大学,600台计算机,700万零件,终于在 1969年7月,阿波罗11号船长阿姆斯特朗登上月球。
例:某项工程任务经分解后,确定由9项作业构成, 各项作业的代号、紧前作业及作业时间 如表所示,画出网络图
作业 A 名称 紧前 作业 作业 15 时间 D
B A
C A
D
E
F D
G D
H
I
15
14
B, B C 10 6
6
1
E, F, G H 30 8
E 3 B 6
15
6
H 30 I 7 F 8 6 8
• 网络图由三大要素构成:节点(事件)、 箭线(作业)和路线。
1 2 3
箭线: 1、代表计划中的一项作业或工序,包括人力、 财力、物力的付出。 2、作业的内容可大可小,可多可少。 3、箭尾表示作业开始,箭头表示作业结束 4、通常把作业的代号和作业所耗时间标在箭线 的上下。 5、虚箭线:不占用时间和空间,不消耗任何资 源。只是为了明 确活动的相互之间的逻辑关系。
4
10
4
4
0
2
3
6
3 10 8
01
4 1818
2
20
5 20
3
23
6 0
23 2
31
32
10
23
7 2
8
9 5 8
31 1
25
10 32
23
26
2。作业时间参数:方括号-最早开工时间 t ES ,三角 -最晚开工时间 t lS
4
0
0 0
2
4
4
6
3
10 10
0 1
3
4
15
2 4 18 18
10
0
8
5
3
20 20
6 0
2
29 23 23
23
13
7
24
23
8 5
9
8
2
31 10 1 32 25 26
31
32
3。总时差,自由时差:中括号-总时差,园括号- 自由时差
R( i , j ) t LF ( i , j ) t EF ( i , j ) t LS ( i , j ) t ( i , j ) t ES ( i , j ) t ( i , j ) t LS ( i , j ) t ES ( i , j )
紧后活动 B,C D E,F G,I G,I H J I,K J L 无 无
活动时间 (周) 3 4 6 8 8 5 3 6 3 5 8 3
3
B 4
1 A 3 2 C 6 4