4 .板壳问题的有限元法(4学时)
7_板壳问题有限元分析

1 1 2 h 1 1 2
h
BiT DB j abd d dz
(6.17)
21 /44
薄板问题的有限元法
代入 D 、 Bi 和 B j 于是有
D 1 1 b2 T kij N i , N j , uN iT, N T, uN iT, N T, j j 1 1 a 2 ab +2(1- )N
2
24 /44
薄板问题的有限元法
k23 15H ab(i j )(i j ) b2 b2 k31 3Ha (2 3 5 2 ) j0 15 2 j 5i0 a a k32 15H ab(i j )(i j )
23 /44
薄板问题的有限元法
其中
b2 a2 a2 b2 k11 3H 0 15( 2 0 2 0 ) (14 4 5 2 5 2 ) 00 b b a a a2 a2 k12 3Hb (2 3 5 2 ) 0i 15 2 i 5 0i b b b2 b2 k13 3Ha (2 3 5 2 )i0 15 2 i 50 j a a a2 a2 k21 3Hb (2 3 5 2 ) 0 j 15 2 j 5 0i b b a2 k22 Hb 2(1 ) 0 (3 50 ) 5 2 (3 0 )(3 0 ) b
1 E D 2 1 0
薄板问题的有限元法
图 6.2 平板内力
10 /44
薄板问题的有限元法
设 M x 、 M y 和 M xy 表示单位宽度上的内力矩,于是有
2w 2 x Mx h h3 2 w h3 M M y h2 z dz D DC D 'C (6.5) 2 12 y 12 2 M xy 2w 2 xy
有限元板壳——王勖成

弹性矩阵
t z [ D p ]{ }dz [ D p ]{ } [ D ][ ] 12
薄板弯曲问题中的弹性矩阵[D]
1 0 1 0 Et 3 1 [ D] 0 D0 1 0 2 12 (1 ) 1 1 0 0 0 0 2 2
Et 3 D0 12(1 2 )
内力矩表示薄板应力的公式
12 z { } 3 {M } t
平衡方程
2 M xy 2 M y 2M x 2 q ( x, y ) 0 2 2 x xy y
由广义应力应变关系及几何关系代入平衡方程得 由W的微分方程:
非协调板单元可以通过分片试验,当单元划分不断缩 小时,计算结果可以收敛于精确解答,但是收敛并非 一定是单调的,即不一定是精确解的上界或下界。
2.2 薄板三角形单元
a1 a 2 x a3 y a 4 x 2 a5 xy a6 y 2 a7 x 3 a8 x 2 y a9 xy 2 a10 y 3
基本方程
w v z y
(1)位移:由假设(1)、(3),有 w w w( x, y ) u z x (2)应变
由假设(1)、(2),薄板弯曲问题只需要考虑三 个分量。根据几何方程,应变可表示为
2w u 2 x x x 2w u { } y z 2 y y xy u v 2w 2 xy y x
形变分量:中面x和y方向的曲率与x,y方向 的扭率。
广 义 应 变
2w 2 x 2w { } 2 y 2 w 2 xy
6板壳有限元
i 4,1
b2 c2 d 2 0 0 (2) a2 e2 i 2
(3) , (4)
最后利用本点1,确 定a2=b/8,代回
弹性薄板矩形(R12)单元
薄板弯曲问题
平面应力: 0 z xz yz
y
z
x
与平面应力问题不 同,薄板弯曲问题是 具有图示几何特征的 结构在横向荷载作用 下的分析。
弹性薄板基本知识
弹性薄板基本概念 所谓薄板是指板厚h比板 最小尺寸b在如下范围的平 y 1 1 h 1 1 板 ~ ~
100 80 b 8 5
N i N i N N 1
N xi
N yi
My1
x3 y3
4
N 4
则薄板的挠度场可由结点位移表示为
w N i d i N d
i 1
e
4) 单元间位移的协调性 可以证明,上述w在边线上任意一点的挠度和 转角都是三次多项式。
弹性薄板矩形(R12)单元
对于转角yi相关的形函数,可推导得 ,
z
N xi b i (1 0 )(1 0 )(1 - )/8
2
N yi a i (1 0 )(1 0 )(1 - 2 )/8
弹性薄板矩形(R12)单元
3) 薄板的挠度场 有了每一结点的形函数,记
Q1 1 Mx1 4 x w3 2 y z 3
M y zdzdx
M xy zdzdy
' xy - h/2
- h/2 h/2
- h/2 h/2
第7章 薄板弯曲问题的有限元法
u z 0 0 v z 0 0
分别表示薄板弯 曲曲面在x,y方 向的曲率
w u z x v z w y
绕x轴转角
表示薄板弯曲曲 面在x,y方向的 扭率
2w x 2 x 2w y 2 y 2w xy xy
3
2)厚度不变假设:即忽略板厚变化。即 z 0 。由于板内各点的挠度与 z 坐标无关,只是x,y的函数,即 w w( x, y) 3)中面上正应力远小于其它应力分量假设:平行于中面的各层相互不挤压, 不拉伸,沿z向的正应力可忽略,即 z 0
4)中面无伸缩假设:弯曲过程中,中面无伸缩,(薄板中面内的各点都 没有平行中面的位移)即 u z 0 0 v z 0 0
2
三、矩形薄板单元分析 用有限元法求解薄板弯曲问题,常在板中面进行离散,常用的单元有 三角形和矩形。为了使相邻单元间同时可传递力和力矩,节点当作刚性节 点,即节点处同时有节点力和节点力矩作用。每个节点有三个自由度,即 一个扰度和分别绕x,y轴的转角。 m l 1.设位移函数 xl
yl wl
图中力矩双箭头方向表示是力 矩的法线方向,列平衡方程:
(M ) y 0 (M ) x 0 Fz 0
M xy M y FSy F FSy 0 FSy dx ( FSy dy)dx FSx dy ( FSx Sx dx)dy qdxdy 0 y y x x M xy M x 由应力的正负方向的规定得出: FSx 0 y x 正的应力合成的主矢量为正, 2 2 2 2 F F w w 正的应力乘以正的矩臂合成的 Sx Sy q 0 D 2 2 2 2 q y y x 主矩为正;反之为负。 x y x 2 2 或者D w q, 式中, = 2 2 表示拉普拉斯算子。 x y
11第4章板壳问题有限元
w S1 w ,
w n
S1
( 4-1-5)
其中 n 表示边界的法线方向。特例情况下, S1 为固支边,则 w S 0 ,
1
w 0 n S1
146
2 、 在边界 S 2 上,给定位移 w 和力矩 M n ,即
w S w , M n
2
S2
M n
( 4-1-6)
特例情况下, S 2 为简支边,则 w S 0 , M n
2 2
(常曲率和常扭率)项,因为将它们代入式( 4-1-1)可以得
2 w 2 2 4 x 2 w 2 2 6 y
2
2 w 2 5 x y
( 4-2-3)
因此,在板弯曲单元的挠度函数中存在常数项、一次项和二次项,就可以满足完备性条件。 (2 )协调条件: 以单元 1-2 边为例,该边上 y 为常数,挠度 w 是 x 的三次函数
如平板的表面上作用有 z 向的分布荷载 q , 则从以上各式可以得到经典薄板理论的系统总位能泛函 表达式
1 w T D qw dxdy Q wdS M n dS b n S3 S2 S3 2 n
{M } [Db ]{ }
式中, [ Db ] 为板弯曲弹性矩阵,对于各向同性材料有
(4-1-3)
1 0 Et [D b ] 1 0 2 12(1 ) 1 0 0 2
3
(4-1-4)
为建立平板弯曲问题的能量泛函,还要考虑荷载和边界条件。关于边界条件有三种情况: 1 、 在边界 S1 上,给定位移 w 和截面转角 ,即
2 4 w T e ] z [B i ]{ z[ B ]{ } i} x y i 1
机械工程用有限元法学习笔记(四)

薄板弯曲问题的有限元法一、 薄板弯曲问题的基本方程什么是薄板?薄板就是指厚度t 远小于其长度、宽度的板。
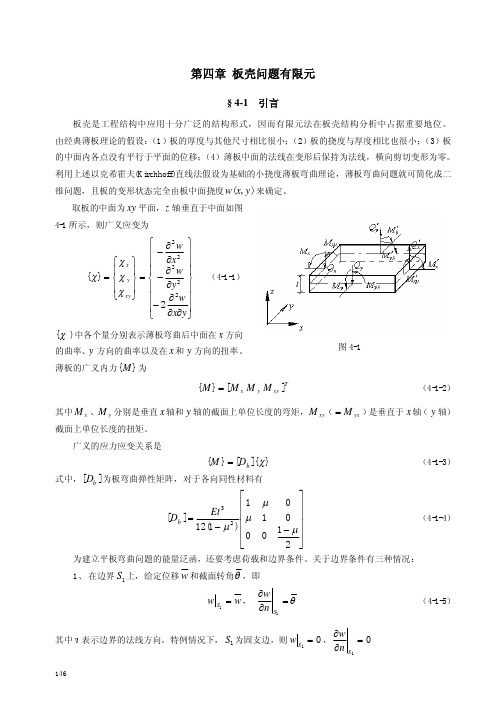
1. 三个基本假设(克希霍夫假设): (1) 法线假设,εz =0,γyz =γzx =0 (2) 正应力假设,σz <<σx ,σy ,τxy (3) 小挠度假设,w<t/4根据假设,可以得到位移分量()()()()()(),,,,,,,,,,, x y z u x y z z x x y z v x y z z y x y z x y ωωωω∂⎧=-⎪∂⎪∂⎪=-⎨∂⎪⎪=⎪⎩式4-1图 1 薄板弯曲后某点B 的位移2. 应变分量{}222222x y z x z y x y ωεωεεεω⎧⎫∂-⎪⎪∂⎪⎪⎧⎫⎪⎪∂⎪⎪⎪⎪==-⎨⎬⎨⎬∂⎪⎪⎪⎪⎩⎭⎪⎪∂-⎪⎪∂∂⎪⎪⎩⎭式4-23. 曲率{}222222x y z x y x y ωχωχχχω⎧⎫∂-⎪⎪∂⎪⎪⎧⎫⎪⎪∂⎪⎪⎪⎪==-⎨⎬⎨⎬∂⎪⎪⎪⎪⎩⎭⎪⎪∂-⎪⎪∂∂⎪⎪⎩⎭式4-3 22=x x ωχ∂-∂——薄板弹性曲面在x 方向的曲率22=y yωχ∂-∂——薄板弹性曲面在y 方向的曲率2=z x yωχ∂-∂∂——薄板弹性曲面在x 方向和y 方向的扭率4. 应力分量与应变分量间的关系:{}[]{}2222222222221 11D Ez xy Ez x y Ez x y σεωωμμωωμμωμ=⎧⎫⎛⎫∂∂-+⎪⎪ ⎪-∂∂⎝⎭⎪⎪⎪⎪⎛⎫∂∂⎪⎪=-+⎨⎬ ⎪-∂∂⎝⎭⎪⎪⎪⎪∂⎪⎪--∂∂⎪⎪⎩⎭式4-4 5. 线力矩{}()2222222101012110022x y z x M Et M M y M x y ωμωμμμω⎧⎫∂-⎪⎪⎡⎤∂⎪⎪⎢⎥⎧⎫⎪⎪⎢⎥∂⎪⎪⎪⎪==-⎨⎬⎨⎬⎢⎥∂-⎪⎪⎪⎪⎢⎥-⎩⎭⎪⎪⎢⎥∂⎣⎦-⎪⎪∂∂⎪⎪⎩⎭式4-5a广义应力与广义应变之间的关系式{}[]{}D M χ= 式4-5b式中:[D]—薄板弯曲问题的弹性矩阵6. 薄板弯曲问题的基本方程(双调和方程)()32222222121Et p xx y y ωωωμ⎛⎫∂∂∂++= ⎪∂∂∂∂-⎝⎭ 式4-6()32121Et μ-——薄板弯曲刚度 二、 矩形薄板单元分析 1、矩形薄板单元图 2 矩形薄板单元2、位移函数22123456322333789101112 a a x a y a x a xy a y a x a x y a xy a y a x y a xy ω=+++++++++++ 式4-73、形状函数[]{}k i i xi xi yi yi j j xj xj yj yj k kxk xk yk y l l xl xl yl yl N N N N N N N N N N N N N q ωωθθωθθωθθωθθ=+++++++++++= 式4-8式中:i,j,k,l ——节点号N i ,N xi ,N yi ,……,N yl ——形状函数()()()()()()()()()()2211128N 111 ,,,8111 8y i i i i i xi i i iyi i i i b N i i j h l N a x a b ξξηηξξηηξηηξξηηηξξξηηξξη⎧⎫++++--⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪=-++-=⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎪⎪++-⎪⎪⎩⎭==, 式4-94、单元刚阵[][][][]S K TB D B dxdy =⎰ 式4-10式中:[]22222222222222222222 2222yi yl i xiyi yl ixi yi yl i xi N N N N x x x x N N NN B y y y y N N N N x yx yx yx y ⎡⎤∂∂∂∂⎢⎥∂∂∂∂⎢⎥⎢⎥∂∂∂∂=⎢⎥∂∂∂∂⎢⎥⎢⎥∂∂∂∂⎢⎥⎢⎥∂∂∂∂∂∂∂∂⎣⎦式4-11 5、节点力与节点位移的关系式{}[]{}F K q = 式4-12三、 三角形薄板单元分析1、三角形薄板单元当薄板具有斜交边界或曲线边界时,可采用三角形单元较好地反映边界形状。
(完整版)第九章板壳结构有限元
单元数 (1/4板)
2×2 4×4 6×6 理论解
四边固定
板中心挠度 wD/PL2
边中点弯矩 M/P
0.00614
-0.1178
0.00580
-0.1233
0.00571
-0.1245
0.00560
-0.1257
薄板三角形单元
三角形单元能较好地适应斜边界,实 际中广泛应用。单元的结点位移仍然 为结点处的挠度wi和绕x,y轴的转角
θxi、θyi,独立变量为wi。三角形单元 y
位移模式应包含9个参数。
θx1 1
θy1
z
w1
x 3
2
如果在直角坐标系下建立位移模式,则完全三次多项式需要 10个参数
若以此为基础构造位移函数,则必须去掉一项。无法保证对称。
薄板三角形单元
三角形单元采用直角坐标系建立位移模式的尝试: Tocher方案
单元有两边分别平行于x轴和y轴时,上述位移模式中的待定系数将无法
四次项的选取为了保证坐标的对称性,且曲率与扭率同阶次。 利用12个结点位移条件,由广义坐标法可建立形函数,显然 十分麻烦。因此形函数的建立采用拉格朗日插值函数形成, 完成这项工作首先需要将其转化为一个2×2的正方形,对于 矩形单元,这项操作并不困难。
薄板矩形单元
下面开始尝试建立形函数。 建立的形函数形式如下:
单元刚度矩阵由16个子矩阵组成,其表示如下
薄板矩形单元
具体的元素计算为:
式中:
薄板矩形单元
结点载荷向量的计算: 假设板单元受横向均布载荷p作用,则 等效结点力为 积分展开,得
如果承受的分布荷载随位置(x,y)变化,积分工作量较大
薄板矩形单元
应用实例
谭继锦有限元法课件之八 5概述薄板单元

F
e
B D B dxdy y
T e
5-11 5-12 5-13
F
e
K
e e
e T
其中: K = B D B dxdy
K
e
就是单元节点位移与单元节点力之间的转换矩阵, 也就是矩形板单元的刚度矩阵。
第五章 板壳问题的有限元法 同时,采用曲面单元来描述壳体的真正几何形状,还可以 同时 采用曲面单元来描述壳体的真正几何形状 还可以 用较少的单元数目来代替复杂形状的壳体,并能得到具有 相当精度的结果 因此就有基于Mindlin理论为基础的曲面 相当精度的结果,因此就有基于 壳体单元。
理论基础 单元类型 3节点三角形单元 Kirchhoff理论 任意四边形单元 4节点的Huges-Liu g 单元 (薄 薄 壳单元,大位移, 大转动, Mindlin理论 大应变) 4节点的Belytschko-Lim - Tsay y薄壳单元 薄壳单元(薄壳单元, 薄壳单元 大位移,大转动) 冲压成型分析及碰 撞问题分析 常规的结构分析 适用问题
第五章 板壳问题的有限元法 本章介绍薄板单元及薄板弯曲的有限元法,薄壳单元及 薄壳问题的有限元法。通过板壳单元理论和板壳单元介绍, 掌握板壳问题的有限元法。 掌握板壳问题的有限元法
第 节 概述 第一节
与平板相对应,由两个曲面为界限所围成的物体,当两 曲面间的距离远小于物体的其它尺寸时,这种结构物称为壳 体。两曲面之间的距离,称为壳体的厚度,平分厚度的曲面 称为中曲面,一般工程上以壳体厚度与中曲面的曲率半径比 值小于1/20被认为是薄壳。
e
T i
T j
有限元法PPT课件
Motorola– Drop Test Fujitsu-Computers Intel –Chip Integrity
电子
Baxter - Equipment J&J – Stents Medtronic - Pacemakers
医疗
Principia-spain Arup-U.K. T.Y. Lin - Bridge
有限元法
左图所示,为分析齿轮上一个齿内的应力分布,可分析图中所示的一个平面截面内位移分布.作为近似解,可以先求出图中各三角形顶点的位移.这里的 三角形就是单元,其顶点就是节点。
从物理角度理解, 可把一个连续的齿形截面单元之间在节点处以铰链相链接,由单元组合而成的结构近似代替原连续结构,在一定的约束条件下,在给定的载荷作用下,就可以求出各节点的位移,进而求出应力.
一.Abaqus公司简介
公司
’00 ’01 ’02 ’03 ’04 ‘05 ’06 ‘07
18%
18%
20%
SIMULIA公司(原ABAQUS公司)成立于1978年,全球超过600名员工,100% 专注于有限元分析领域。 全球28个办事处和9个代表处 业务迅速稳定增长,是当前有限元软件行业中唯一保持两位数增长率的公司。 2005年5月ABAQUS加入DS集团,将共同成为全球PLM的领导者
Where :
Displacement interpolation functions (位移插值函数)
13.3 Approximating Functions for Two-Dimensional Linear Triangular Elements (二维线性三角形单元的近似函数)
node (节点)
element(单元)
第5章 板壳问题的有限元法

协调性要求 协调单元 满足协调性要求的单元称为 满足协调性要求的单元称为协调单元 收敛的充要条件 w = α1 + α 2 x + α 3 y + α 4 x 2 + α 5 xy + α 6 y 2 + α 7 x 3
+ α 8 x 2 y + α 9 xy 2 + α10 y 3 + α11 x 3 y + α12 xy 3
− 2
h
M xy = ∫ h2 τ xy zdz
− 2
h
{M } = ∫
2 −h 2
h
h {σ }zdz = [D p ]{κ } = [D ]{κ } 12
薄板弯曲的弹性矩阵
11
3
薄板弯曲的应变能 弹性应变能 T 1 1 U = ∫ (σ xε x + σ yε y + τ xyγ xy )dV = ∫ {ε } {σ }dV 2V 2V ⎧ ∂2w ⎫ ⎪ − 2 ⎪ x ⎪ ⎪ ∂2 ⎪ ∂ w ⎪ {σ } = D p {ε } = D p {κ }z {ε } = z ⎨ − 2 ⎬ = z{κ } ∂y ⎪ ⎪ T 1 ∂2w ⎪ U = ∫ {κ } [D p ]{κ }z 2 dV ⎪ 2V ⎪− 2 ∂x∂y ⎪ ⎩ ⎭ T 1 = ∫ {κ } [D ]{κ }dS
∂w 法向导数θ x = ∂y 是x的三次函数,假定
θx = γ1 + γ 2x + γ 3x + γ 4x
2
3
由节点1和节点2处只能提供 θx1,θx2 两个相邻单元在边界上的法向导数的连续性 不能保证。 这种位移函数的矩形单元为非协调单元。
第8章_膜、板、壳结构的有限元法
西安工程大学
计算机辅助工程 CAE 讲稿 第 8 章 膜、板、壳结构的有限元法
王益轩编著 2005 年 8 月
99
k y
uk vk wk θkx θkx
o z
ui vi wi
uj vj wj θjx θjy
图 84
平面 3 节点 15 个自由度的三角形壳单元
8.4
SHELL63 单元描述
(85)
Y
O L
t
X
图 81 梁受弯曲力矩作用的变形(a)
西安工程大学
计算机辅助工程 CAE 讲稿 第 8 章 膜、板、壳结构的有限元法
王益轩编著 2005 年 8 月
95
y x
y u
θ
局部放 大
M
M
中性层的挠曲 线 f(x)
图 81 梁受弯曲力矩作用的变形 (b)
M
z x y
M
M
(a)
z M y x L M t
8.3 壳结构单元基础理论
壳单元能承受拉伸应力与弯矩力,也就是膜单元与板单元合并后的单元,以三角形单元为例来说, 单元的应变位移关系式(几何关系)与三角形板单元完全相同,只不过每个节点具有5 个节点位移(三 个平动位移,两个转角) ,即 5 个自由度,单元共有 15 个自由度,假设位移模式中应包含 15 个任意常 数。单元图形如图 84 所示。推导过程从略,由读者自己推导。
ANSYS 结构分析中的板壳单元 SHELL63
8.4.1
图 85 SHELL63 板壳单元
SHELL63 称为弹性壳,因为它只支持线性弹性的材料模式; ANSYS 另有其它 shell 单元可以支持更 广泛的材料模式。SHELL63 有 4 个节点(I, J, K, L) ,每个节点有 6 个自由度:3 个位移(UX, UY, UZ) 及 3 个转角(ROTX, ROTY, ROTZ) ,所以一个单元共有 24 个自由度。若 K、L 两个节点重迭在一起时, 它就退化成一个三角形,如图 85 右图所示。IJKL 四个节点假设是共平面,若不共平面则以一最接近 的平面来修正这四个节点。注意,这种修正当然会引进一些误差,所以对那种曲率很大的板壳结构而 言, 必须使用较细的单元。 SHELL63 的单元坐标系统表示在图 85 中, 原点是在 I 节点上, X 轴和 IJ 边可以有一角度差 (THETA,
板壳问题的有限元法

(11.9)
根椐式(11.5) ,分别对 x,y 求导数得
θx =
∂w = a 3 + a 5 x + 2a 6 x + a 8 x 2 + 2a 9 xy + 3a10 y 2 + a11 x 3 + 3a12 xy 2 ∂y
(11.10)
∂w = −( a 2 + 2a 4 x + a5 y + 3a 7 x 2 + 2a8 xy + a9 y 2 + 3a11 x 2 y + a12 y 3 ) (11.11) ∂x 利用式(11.9) 、式(11.10)和式(11.11)及四个结点的位移条件即可确定全部待定常数 a1 — a12 ,将所得系数代回式(11.9) ,并经整理后即可得到
记单元的广义结点位移为
⎡ ⎤ ⎢ wi ⎥ ⎢ ⎥ ⎡ wi ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ∂w ⎥ {δ i } = ⎢θ xi ⎥ = ⎢ ( ) i ⎥ ⎢ ⎥ ⎢ ∂y ⎥ ⎢ ⎥ ⎣θ yi ⎥ ⎦ ⎢ ⎢ ∂w ⎥ ⎢− ( ) i ⎥ ⎣ ∂x ⎦
整个单元的位移由四个结点的位移来确定,即
( i , j , m, p )
θy = −
w = [ N ]{δ }e
其中[N]为 x,y 的函数,称为形函数。显然有
(11.12)
[N ] = [Ni Np
其中
N xi N xp
] =
N yi N yp ]
Nj
N xj
N yj
Nm
N xm
N ym
(11.13)
[N
i
N
xi
N
[N
有限单元法知识点总结

有限单元法知识点总结1. 有限元法概述有限单元法(Finite Element Method ,简称FEM)是一种数值分析方法,适用于求解工程结构、热传导、流体力学等领域中的强耦合、非线性、三维等问题,是一种求解偏微分方程的数值方法。
有限元法将连续的物理问题抽象为由有限数量的简单几何单元(例如三角形、四边形、四面体、六面体等)组成的离散模型,通过对单元进行适当的数学处理,得到整体问题的近似解。
有限元法广泛应用于工程、材料、地球科学等领域。
2. 有限元法基本原理有限元法的基本原理包括离散化、加权残差法和形函数法。
离散化是将连续问题离散化为由有限数量的简单单元组成的问题,建立有限元模型。
加权残差法是选取适当的残差形式,并通过对残差进行加权平均,得到弱形式。
形函数法是利用一组适当的形函数来表示单元内部的位移场,通过形函数的线性组合来逼近整体位移场。
3. 有限元法的步骤有限元法的求解步骤包括建立有限元模型、建立刚度矩阵和载荷向量、施加边界条件、求解代数方程组和后处理结果。
建立有限元模型是将连续问题离散化为由简单单元组成的问题,并确定单元的连接关系。
建立刚度矩阵和载荷向量是通过单元的应变能量和内力作用,得到整体刚度矩阵和载荷向量。
施加边界条件是通过给定位移或力的边界条件,限制未知自由度的取值范围。
求解代数方程组是将有限元模型的刚度方程和载荷方程组成一个大型代数方程组,通过数值方法求解。
后处理结果是对数值结果进行处理和分析,得到工程应用的有用信息。
4. 有限元法的元素类型有限元法的元素类型包括结构单元、板壳单元、梁单元、壳单元、体单元等。
结构单元包括一维梁单元、二维三角形、四边形单元、三维四面体、六面体单元。
板壳单元包括各种压力单元、弹性单元、混合单元等。
梁单元包括梁单元、横梁单元、大变形梁单元等。
壳单元包括薄壳单元、厚壳单元、折叠单元等。
体单元包括六面体单元、锥体单元、八面体单元等。
5. 有限元法的数学基础有限元法的数学基础包括变分法、能量方法、有限元插值等。
第八章一般壳体问题的有限元法
图8-1 任意壳体作为平面三角形单元的集合
图8-2 圆柱壳作为平面矩形单元的集合
壳体平面单元的应力状态是由平面应力和弯曲应力的叠加而成
的,因此在构造壳体平面单元时,只要将第二章和第七章所讨论的
相应单元进行简单的组合就可以了。同样,前述二章所导出的刚度
矩阵可作为建立壳体平面单元刚度矩阵的基础。
现在把平面单元的计算步骤归纳如下
(g)
j 1
j 1
式中 kij 是刚度矩阵 k 的子矩阵。而对于局部坐标和整体坐标之
间的变换公式是
j ' j Ri R'i
(h)
把(h)式代入(g)式得
R'i
n kij
'i
j 1
将公式(g)中的第一式左乘矩阵 ,并且同上式进行比较,可
将壳体曲面划分为有限个单元,它们都是曲面单元。但是在单 元细分时,用平面单元组成的一个单向或双向折板来近似壳体的几 何形状将会得到良好的结果。通常对于任意形状的壳体,采用三角 形单元比较方便,如图8-1所示。如果在壳体上容易找到同一平面上 的四个点,可以采用平面四边形单元。例如具有正交边界的柱面壳 体,如图8-2所示。
由下列单位矢量所确定
(8-9)
V3i
ml33ii
n3i
1 hi
xi yi
zi 顶
xi yi
zi 底
(8-10)
式中l3i、m3i和n3i是结点i处中面法线方向对于整体坐标轴oxyz的方向
间的坐标变换公式是
ME7001《应用固体力学》课程教学大纲-上海交通大学机械与

ME7001《应用固体力学》课程教学大纲课程名称:应用固体力学课程代码:ME7001学分/学时:3学分/48学时开课学期:春季学期适用专业:机械工程及自动化先修课程:理论力学,弹性力学,有限元开课单位:机械与动力工程学院一、课程性质和教学目标课程介绍:固体力学是开展机械工程相关科学基础研究和工程技术应用需要掌握的重要理论基础,对于提高机械工程专业博士研究生的力学理论基础及其工程应用能力具有重要作用。
本课程面向机械工程博士研究生在科学研究中的固体力学分析需求,讲授连续介质力学基本理论,包括张量分析基础、弹塑性理论、非线性有限元方法,及其在结构和工艺分析中的应用。
教学目标:学生通过学习本课程,可以掌握固体力学的一些基本概念,了解机械工程问题中数学和力学建模、求解的一般原理,初步具备对机械工程中结构和工艺问题进行建模和计算的应用能力,从而为从事机械工程科研工作奠定基础。
具体目标包括:(1)掌握材张量分析理论的基本概念、技术术语。
(2)掌握连续介质力学的基本概念和基本原理。
(3)培养应用固体力学原理解决工程问题和设计满足要求的构件或系统的能力。
二、课程教学内容及学时分配1.固体力学及应用概论(1学时)主要讲述固体力学涉及的理论内容概述,固体力学在机械工程领域科研和工程实践中的应用基本情况。
2.张量分析基础(6学时)主要讲述欧式空间中的矢量和张量、张量和矩阵的几种记法、矢量和张量分析、张量函数的导数、坐标变换、二阶张量及其不变量、Cayley-Hamilton定理、各向同性张量等内容。
3.线弹性问题(6学时)主要讲述各向同性线弹性材料的应力-应变关系、各向异性弹性固体材料的应力-应变关系、弹性刚度张量的对称性、线弹性理论中的变分方法、不变原理和最小势能原理、有限元方法理论、单元插值函数、单元应变、应力、刚度矩阵、边界加载、位移边界条件的引入等。
4.大变形问题基本方程(6学时)主要讲述无限小应变的适用性、物体的变形分析、物体的运动分析、物体的应变度量、物体的应力度量、静力平衡与能量原理、大变形弹性本构方程等。
有限元教案_壳问题

2
薄壳单元节点的自由度 1、在单元局部坐标系中节点的自由度 (a)平行于中面的变形部分(平面应力) (a)平行于中面的变形部分(平面应力) 平行于中面的变形部分 薄壳中面内 x 方向位移 u i 和 y 方向位移 v i ,
两个线位移自由度。
(b)弯曲变形部分(薄板弯曲) (b)弯曲变形部分(薄板弯曲) 弯曲变形部分 垂直于中面的挠度 w i,绕 x轴转角 θ xi 和绕 y轴转角 θ yi,
薄壳问题的有限元法
薄壳问题有限元法的基本思路 薄壳单元节点的自由度 薄壳问题的位移约束
1
薄壳问题有限元法的基本思路
薄壳中面为曲面, 荷作用时 薄壳中面为曲面, 受载荷作用时,既产生平行 中面的变形 变形, 产生弯曲变形。 与拱相类似) 于中面的变形,还产生弯曲变形。(与拱相类似) 薄壳的中面曲面可以用足够小平面拼接而成的 折曲面替代(类似于以折线代替曲线)。平行于中 )。平行于 折曲面替代(类似于以折线代替曲线)。平行于中 面的变形分析属于平面应力问题 弯曲变形分析属 变形分析属于平面应力问题, 面的变形分析属于平面应力问题,弯曲变形分析属 板弯曲问题 于薄板弯曲问题 。 在有限元方法中,复杂的薄壳问题 薄壳问题可以分解为 在有限元方法中,复杂的薄壳问题可以分解为 平面应力问题和薄板弯曲问题的组合。 平面应力问题和薄板弯曲问题的组合。
一个线位移和两个角位 移
3
4
薄壳单元节点的自由度
单元局部坐标系中节点位移向量
{∆ }= {u , v , w ,θ
e i i i i
,θyi} xi
T
5
薄壳单元节点的自由度 2、在整体坐标系中节点的自由度 整体坐标系与单元局部坐标系的坐标轴之 间存在夹角,一般整体坐标系中节点的三个角 间存在夹角,一般整体坐标系中节点的三个角 位移在局部坐标系的任何一个坐标轴上都会有 分量, 分量,也即整体坐标系中三个角位移都对局部 坐标系中的单元变形有贡献。因而, 坐标系中的单元变形有贡献。因而,在整体坐 标系中,三个角位移均视为有效的自由度。 标系中,三个角位移均视为有效的自由度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 板壳问题的有限元法
章节内容: 5.1 薄板弯曲的基本理论 5.2 薄板单元:矩形单元和三角形单元 5.3 薄壳有限元分析的简介
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.1 薄板(thin plate)
工程实际中,存在大量的板壳构件(plate and shell) 几何特点:厚度远远小于其它两个方向的尺寸。 薄板:t/b < 1/15 中面:平分板厚度的平面 坐标系oxyz :xy轴在中面上,z轴垂直于中面 z 载荷 作用于中面内的载荷:平面应力问题 垂直于中面的载荷:板弯曲
其中
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
局部坐标系
局部坐标系对整体 坐标系的方向余弦 矩阵(从整体坐标 到局部坐标)
局部坐标系与整体坐标系的关系
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
坐标变换矩阵
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
单元刚度矩阵
转换矩阵:
3.
应力
引起的形变很小,在计算变形时可以忽略。
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.2 位移
位移分量:薄板中面的挠度 w 根据挠度,可以计算:在x和y轴方向上的位移分量和绕x和y轴方 向的转角。
y
z
b
o
车辆工程教研室
t
x
机电工程学院
5.1 薄板弯曲的基本理论
5.1.3 应变及几何方程
机电工程学院
5.1.5 平衡方程
t为薄板的 厚度
D为薄板弯曲 的弹性系数矩 阵
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.5 平衡方程
应力和内力矩之间的 关系式:
可以看出,应力沿厚度方向 线性分布,最大值出现在薄板的 上下表面处(z=±t/2)
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
车辆工程教研室
机电工程学院
5.3 薄板三角形单元
y j
m O
i
x
特点(与矩形单元相比):
计算精度略低 具有更高的适应性和灵活性,可以较好的模拟边界形状较复杂的 板。
车辆工程教研室
机电工程学院
5.3 薄板三角形单元
y
j
m O
i
位移模式
e T T
x
T T
i j m i T wi xi yi T
5.5 薄壳有限元分析
5.5.1 矩形壳元
单元足够小时,可以用平板单元拼成的折板近似代替光滑壳结构。 局部坐标系 位移向量 面内变形:2个位移u, v 弯曲变形:3个分量(1个挠度w和2个转角θx,θy) 附加位移分量:θz
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
单元刚度矩阵
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
薄壳
薄壳:厚度比其它尺寸(长度、曲率半径等)小很多的壳体。 中曲面:由壳体厚度中点构成的曲面。
薄壳中曲面的变形
弯曲变形: 横截面上的正应力和平行于中曲面的切应力合成弯矩和扭矩 伸缩变形: 中曲面内的正应力和切应力合成中面内力或膜力
y b
o
t
x
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.1 小挠度薄板弯曲理论 (small deflection theory of thin plate)
克西荷夫假设(Kirchhoff): 1. 假设薄板中面的法线在变形后仍为直法线。
2.
厚度方向的位移沿板厚是不变的:即厚度方向的点的位移相同 或者与在厚度方向的位置无关。
机电工程学院
5.5 薄壳有限元分析
消除奇异的方法
非常小的非 零数!
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
应用的限制
由于是平面问题简单的叠加,导致单元仍为平面单元,无法描述像 汽车冲压件一类更复杂的曲面。
车辆工程教研室
x
车辆工程教研室
机电工程学院
5.4 板弯曲有限元法的进一步讨论
薄板矩形单元和三角形单元的使用局限性:
都属于非协调单元(部分协调单元) 不适用于厚板 不容易适应复杂边界
改进方法:
建立协调元,将挠度、转角和扭曲率作为节点位移参数; 放弃直法线假设,将节点位移和转角都作为独立的变量; 采用参数单元,类似于平面问题,将平面应力状态和弯曲状态 叠加,构建一六自由度的薄板单元与六自由度的梁单元组合, 形成常见的板梁组合结构。(见下节)
5.1.6 虚功方程
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.1 薄板矩形单元 (单元描述)
z
y 薄板弯曲只研究中面的变形,因此: p a a m 单元面的任意一点 = 长度为板厚的法线段 b 几何形状:2a×2b 2b x O 节点:4个 wi θyi b 节点编号:逆时针 局部坐标系:直角坐标系oxyz i 2a j θxi 因此, 节点位移 挠度:w 两个转角: x 和 y e T T T T T i j m p 单元节点位移列阵
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
等效节点载荷:
先在局部坐标系下求解; 转换到整体坐标系下 求解在整体坐标系下的位移 然后变换到节点的局部坐标系下求解单元节点位移 再根据局部坐标系下的应力公式求解应力 基于求解的应力再求解弯矩和扭矩。
节点位移和内力的计算:
车辆工程教研室
i T
wi xi yi
T
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.1 位移模式
单元具有12个自由度 1个独立位移分量:挠度w 多项式构造方法
常数项:1 一次项:x 二次项:x2 三次项:x3 四次项:x3y
y xy y2 x2y xy2 y3 xy3 x4 y4 x2y2
机电工程学院
5.5 薄壳有限元分析
三角形壳元
灵活,可以分析任意 形状的薄壳
局部坐标系的建立 节点位移向量
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
单元刚度矩阵
其中
车辆工程教研室
机电工程学院
5.5 薄壳有限元分析
坐标变换 单元位移向量变换:
单元刚度矩阵变换:
坐标变换矩阵:
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.4 应力及物理方程
根据基本假设,薄板弯曲问题选用3个基本应力分量:
根据广义虎克定律,可以得到应力和应变之间的关系式:
物理方程
车辆工程教研室
机电工程学院
5.1 薄板弯曲的基本理论
5.1.4 应力及物理方程
根据基本假设,薄板弯曲问题选用3个基本应力分量:
(i 1,2,3,4)
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.3 单元刚度方程
k
e
B D B dxdy
T
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.4 单元等效节点载荷
单元等效节点载荷列阵
几种载荷情况: 横向集中力或者力矩—集中力点取做节点; 法向集中力(需要按照等效原则移置到节点上)
答:(1)沿x轴和y轴的方向挠度函数都是三次多项式,因此能够保 证单元内部及相邻单元之间挠度的连续性。(2)θx和θ y在单元边界 上沿x轴和y轴方向的多项式次数不同,因此,很难保证相邻单元在 公共边界上转角的连续性。 因此,为部分协调单元(非协调单元)。
车辆工程教研室
z
机电工程学院
5.2 薄板矩形单元
车辆工程教研室
机电工程学院
5.2 薄板矩形单元
5.2.1 位移模式
该位移模式是否满足三个条件? 反映单元的刚体位移
答:刚体位移是指挠度和转角为常数。因此常数项和2个一次项反映 了单元的刚体位移。
反映单元的常应变
答:应变为挠度的二次偏导数。因此3个二次项反映了单元的常应变。
位移函数保证单元内部及相邻单元之间位移的连续性
车辆工程教研室
机电工程学院
5.3 薄板三角形单元
位移模式
9个自由度 插值方法
y
j
多项式插值 常数项:1 一次项:x 二次项:x2 三次项:x3
y xy y2 x2y xy2 y3
m
i
O 面积坐标插值 常数项: Li Lj Lm 二次项: Li Lj LjLm Lm Li 三次项: Lj Lm2-LmLj2 LmLi2-LiLm2 LiLj2-LjLi2
分布横向载荷
车辆工程教研室
z
机电工程学院
5.2 薄板矩形单元
5.2.5 整体分析 5.2.6 边界条件
p
a
y
a b
m x
2b wi θyi i θxi
O 2a j
b