三菱伺服驱动选型
三菱伺服电机选型资料ppt

专用型号
FZ5000
该型号为高精度伺服电机,适用于需要精密控制的定位系统,如医疗设备和 科研装置等。
FZ1000
该型号为紧凑型高精度伺服电机,适用于空间有限的精密控制系统,如工业 自动化设备和机器人等。
其他系列型号
FS5000
该型号为高性能伺服电机,适用于需要高动态性能和快速响应的应用场景,如物 料搬运和机床等。
超过保修期后,如需维修,需 用户承担全部维修费用
07
三菱伺服电机前景展望
市场趋势
工业4.0和智能制造的发展
全球范围内,越来越多的制造业正在向工业4.0和智能制造转型,这给三菱伺 服电机带来了更广阔的应用前景。
新能源汽车和电动车市场的增长
随着环保意识的提高和新能源汽车技术的不断发展,电动车市场正在迅速扩 大。三菱伺服电机在新能源汽车中具有广泛的应用前景。
了解电机的维护和保养要求,以便及时更换磨损部件或进 行预防性维护。
05
三菱伺服电机应用案例
案例一:华润水泥
华润水泥是国内知名的水泥生产商,在选择伺服电机时,他 们注重设备的稳定性和可靠性。
三菱伺服电机的高性能和耐用性赢得了华润水泥的信任,成 为其生产线的重要驱动设备。
案例二:中联重科
中联重科是全球知名的工程机械制造商,选择伺服电机时 ,他们需要能够承受高强度作业的设备。
使用寿命
01
长寿命设计
三菱伺服电机的设计寿命长,能够在长期连续运行状态下保持良好性
能。
02
维护简便
电机维护简单,只需定期检查和保养即可,减少了维护成本和时间。
03
持久耐用
采用高品质的材料和先进的加工工艺,使电机具有较高的耐用性,确
保长期稳定运行。
伺服电机选型

1)牙科贝思直线电机选型软件
考试题
已知:丝杠传动类型,负载重量W=10Kg, 负载垂直升降距离30mm,加(减)速时 间0.1s,匀速0.1s。设计最优结构,根据 所选丝杠,计算满足负载需求的最小功率 的伺服电机(三菱电机)。
已知:同步带传动类型,负载重量
W=3Kg,负载垂直升降距离300mm,加
负载重量:5kg 带轮选型:5M-18齿 电机选型:200W(三菱伺服电机)
核算:
3)伺服电机选型计算 (齿轮齿条传动类型)
齿轮齿条传动类型的伺服电机选型计算与同步带类似。 计算时需注意: 上述公式中同步带直径为带轮节径,具体数值可查标准《圆弧齿带
轮直径JB/T 7512.2》、《周节制带轮直径GB/T 11361》。 渐开线圆柱齿轮直径为齿轮的分度圆直径,直齿轮分度圆直径D=m
负载的惯量:JW=
M(D)2 / 2
R
2
JB
③负载转矩的计算
水平运动时负载转矩:TW=μMg
D 2
/
R
垂直运动时负载转矩:TW=μMg
D 2
/
R
Mg
D 2
/
R
加减速转矩的计算:TA= (JM J机)2tπ1 • N
最大转矩:T=TA+TW
3)伺服电机选型计算 (同步带传动类型)
示例:S4000(样机)-68部
2)三菱伺服电机HG-KN系列参数表
2)三菱伺服电机HG-KN系列参数表
3)伺服电机选型计算 (丝杆传动类型)
①根据总方案结构、节拍图、电池片工位图确定
负载质量M
丝杠的导程P
丝杠直径D
丝杆质量MB
导轨、丝杆运行摩擦系数μ(一般取值0.15)
三菱伺服驱动器说明书
MITSUBISHI三菱J2S数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 三菱J2S连接示意图 2. 通电前的检查 3. 通电时的检查 4. 三菱J2S伺服驱动器的参数设定方法 5. 三菱J2S伺服驱动器的参数表 6. 三菱J2S伺服驱动器的参数和性能优化调整 1.三菱J2S连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在三菱的保修范围!) 2. 通电前的检查 1) 确认三菱J2S伺服驱动器和电机插头的连接,相序是否正确: A. 中惯量电机HC-SFS 52(0.5KW)~152(1.5KW)的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 刹车电源 B1 G 刹车电源 B2 H B. 中惯量电机HC-SFS 202(2.0KW)以上的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 制动器插头 刹车电源 B1 A 刹车电源 B2 B 注: 电机相序错误,通电时会发生电机抖动现象。
刹车电源 B1、B2无极性。
2)确认三菱J2S伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认三菱J2S伺服驱动器CN1A和数控系统的插头联接正确, 接插件螺丝拧紧。
4) 确认三菱J2S伺服驱动器CN1B接插件螺丝拧紧,和外部控制连接正确。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内,单相主电路输入 电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认接地可靠。
4.三菱J2S伺服驱动器的参数设定方法 三菱J2S伺服驱动器修改参数的操作方法,如下: 1) 按“MODE”按钮,可切换显示以下6种方式, 2 切换到显示基本参数画面: 2) 按○·UP和○· DOWN键,选择想修改参数的参数号(例修改2号参3) 按2次○·SET键(想修改参数的参数值显示并闪烁)。
三菱数控系统中交流伺服电机的选择_魏胜

表 2 3 种电机型号的电机惯量
电机 电机惯量 负载惯量 负载惯 判
型号 /(kg·cm2) /(kg·cm2) 量倍率 定
HA80N
20.3
20.35
1.01 √
HA100N 72.8
20.35
0.53 √
HA200N
135
20.35
0.29 √
3 短时间特性(加减速时间常数) 的计算
其中,JM 表示电机惯量(带制动);TMAX 表示 最大扭矩,二者的取值可由手册查出;
HA200N:Trms=TL
×
D
1 2
=7.76
×
0.29
1 2
=
4.18 ( N·m ),
( N·m )。
TSt × 80% = 16.7 × 80% = 13.36
综合表 2-4 所做出的判定结果,参照三菱电机
手册,选用 HA100N(2000r/min)型伺服电机,对
应伺服驱动器的型号为 SVJ2-20。
Selection of AC Servo Motor in Mitsubishi NC System
WEI Sheng, WANG Mingyou
(School of Mechanical and Electrical Engineering, Shenzhen Polytechnic, Shenzhen, Guangdong 518055, China)
Abstract: The selection of Servo motor should be in accordance with specific requirement. If servo motor does not match with machine, the former can neither perform its function, nor optimize the parameters. By working out the load inertia rate, acceleration, deceleration and sequence characteristics, the paper introduces the process of AC servo motor selection based on the selection principle of MITSUBISHI motor.
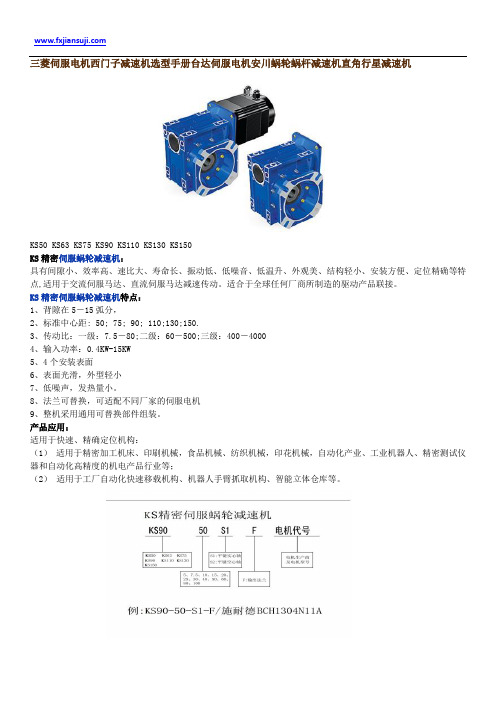
三菱伺服电机西门子减速机选型手册台达伺服电机安川蜗轮蜗杆减速机直角行星减速机
三菱伺服电机西门子减速机选型手册台达伺服电机安川蜗轮蜗杆减速机直角行星减速机
KS50 KS63 KS75 KS90 KS110 KS130 KS150
KS精密伺服蜗轮减速机:
具有间隙小、效率高、速比大、寿命长、振动低、低噪音、低温升、外观美、结构轻小、安装方便、定位精确等特点,适用于交流伺服马达、直流伺服马达减速传动。
适合于全球任何厂商所制造的驱动产品联接。
KS精密伺服蜗轮减速机特点:
1、背隙在5-15弧分,
2、标准中心距: 50; 75; 90; 110;130;150.
3、传动比:一级:7.5-80;二级:60-500;三级:400-4000
4、输入功率:0.4KW-15KW
5、4个安装表面
6、表面光滑,外型轻小
7、低噪声,发热量小。
8、法兰可替换,可适配不同厂家的伺服电机
9、整机采用通用可替换部件组装。
产品应用:
适用于快速、精确定位机构:
(1)适用于精密加工机床、印刷机械,食品机械、纺织机械,印花机械,自动化产业、工业机器人、精密测试仪器和自动化高精度的机电产品行业等;
(2)适用于工厂自动化快速移载机构、机器人手臂抓取机构、智能立体仓库等。
伺服电机选型的原则和注意事项

伺服电机选型的原则和注意事项
为了满足机械设备对高精度、快速响应的要求,伺服电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压,还应具有较长时间的过载能力,以满足低速大转矩的要求,能够承受频繁启动、制动和正、反转,如果盲目地选择大规格的电机,不仅增加成本,也会使得设计设备的体积增大,结构不紧凑,因此选择电机时应充分考虑各方面的要求,以便充分发挥伺服电机的工作性能;下面介绍伺服电机的选型原则和注意事项。
选用伺服电机型号的步骤1、明确负载机构的运动条件要求,即加/减速的快慢、运动速度、机构的重量、机构的运动方式等。
2、依据运行条件要求选用合适的负载惯最计算公式,计算出机构的负载惯量。
3、依据负载惯量与电机惯量选出适当的假选定电机规格。
4、结合初选的电机惯量与负载惯量,计算出加速转矩及减速转矩。
5、依据负载重量、配置方式、摩擦系数、运行效率计算出负载转矩。
6、初选电机的最大输出转矩必须大于加速转矩加负载转矩;如果不符合条件,必须选用其他型号计算验证直至符合要求。
7、依据负载转矩、加速转矩、减速转矩及保持转矩,计算出连续瞬时转矩。
8、初选电机的额定转矩必须大于连续瞬时转矩,如果不符合条件,必须选用其他型号计算验证直至符合要求。
9、完成选定。
伺服电机的选型计算方法 1、转速和编码器分辨率的确认。
2、电机轴上负载力矩的折算和加减速力矩的计算。
3、计算负载惯量,惯量的匹配,安川伺服电机为例,部分产品惯量匹配可达50倍,但实际越小越好,这样对精度和响应速度好。
三菱伺服选型
电机型号
备注
HF-SN52J-S100
HF-SN52BJ-S100
HF-SN102J-S100
HF-SN102BJ-S100 HF-SN152J-S100 HF-SN152BJ-S100 HF-SN202J-S100
K:带键槽 J:带油封 B:带制动
HF-SN202BJ-S100
HF-SN302J-S100
K:带键槽
MR-J3系列
1
MR-J3-100A/B
HF-SP-102 HF-SP-102B
1.5 2
3.5
MR-J3-200A/B MR-J3-200A/B MR-J3-350A/B
A:通用接口型 B:SSCNET Ⅲ/H接口 型
HF-SP-152 HF-SP-152B HF-SP-202 HF-SP-202B HF-SP-352 HF-SP-352B
备注
K:带键槽 J:带油封 B:带制动
MR-JE系列
电机HG-SN系列:中惯量、中功率、2000rpm
功率 (KW)
放大器型号
备注
0.5 MR-JE-60A/B
1
MR-JE-100A/B
A:通用接口型
1.5 MR-JE-200A/B B:SSCNET Ⅲ/H接口
型
2
MR-JE-200A/B
3
MR-JE-300A/B
备注
K:带键槽 J:带油封 B:带制动
伺服电机型号说明范例:
三菱伺服选型
编码器线 MR-JCCBL2M-L/H
2m/3m/5m/10m/20m
电机HF-KP系列:低惯量、小功率、3000rpm
功率 (KW)
放大器型号
备注
三菱交流伺服电机的选择解读
三菱交流伺服电机的选择解读————————————————————————————————作者:————————————————————————————————日期:三菱交流伺服电机的选择杨世方基本理论对伺服驱动来讲,应当首先考虑的是:1,最大速度或最大转矩下所需的功率2,启动、停止过渡过程中所通的功率而对伺服电机来讲,由于其使用目的主要还在于后者,即主要是根据负载加减速时所需要的动力(功率)来决定马达大小,因此主要依据是:(1)负载的惯性大小(2)合理选取传动比电机选取则主要依据功率速率(比功率)下面看一个选取例:M ηαMαL J L TLJ M TM符号说明:T M:电动机轴上所需的电机扭矩[N-m]J M: 电动机轴上的电机转动惯量[kg-m2] (=GD2/4)R :传动比R〉1 减速R= 1 等速R< 1 增速η:传动效率≤ 1T L:负载轴扭矩[N-m]J L :负载轴上的负载的转动惯量[kg-m2] 千克米2αL :负载轴角加速度αM :经过传动比为R的传动,为使负载轴得到角加速度αL在电机轴上的角加速度αMαM= RαL起动时所需电机转矩T M为下列几相之和(1)用于电机本身加速的加速转矩T1[N-m](2)使负荷加速的转矩T2[N-m](3)为使负载轴(经过传动装置)得到转矩T L 所需要的转矩T3[N-m] T2和T3 不同,T3是正常运行时所需转矩则:T1= J M ·αM = J M ·R·αL根据,η·R·T2 = J L ·αL (牛顿定律)负载加速转矩:T2=(J L ·αL)/η·R正常运行时电机提供转矩:T3= T L/η·R电机起动转矩T M ≥T1+T2+T3 ≥J M ·R·αL +{(J L ·αL)+T L/η·R}---------(1) 对上式右侧求R的偏微分,并使其等于零,即可求得(1)式右变最小值时的R0∂ T M / ∂ R =0R0= (J L ·αL+T L)/ J M·αL·η ------------------ (2)R0 称为最佳传动比,就是能使T M最小的传动比,选取这个传动比,电机所需的起动矩扭最小。
三菱伺服电机选型资料

HC系列伺服电机
型号 电压范围 功率范围
HC1、HC3、HC5、HC7 DC24V、DC48V、DC100V 0.75kW、1.5kW、2.2kW、3.7kW
HC系列伺服电机
扭矩范围
7.5N·m、15N·m、22N·m、37N·m
转速范围
50~3000r/min
精度
±0.01mm
HG系列伺服电机
三菱电机伺服电机是该公司的重要产 品之一,具有高精度、高响应、高稳 定性等优点。
三菱伺服电机的特点和优势
高精度控制
三菱伺服电机采用先进的编码器技术 ,可以实现微米级精度控制,适用于 各种高精度场合。
高稳定性
三菱伺服电机可以适应各种不同的应 用场景,包括水平工作台、三菱伺服电机选型案例分析
案例一:某机械厂设备改造项目
总结词
通过三菱伺服电机的应用,机械厂设备改造项目实现 了生产效率的提升、能耗的降低以及产品质量的改进 。
详细描述
在某机械厂设备改造项目中,三菱伺服电机被用于驱 动各种机械部件,如切削、钻孔、铣削等。通过精确 控制电机转速和扭矩,机械加工的精度和效率得到了 显著提升。同时,由于三菱伺服电机具有高效率和低 能耗的特点,该项目还实现了能耗的降低,为企业节 省了成本。此外,通过使用三菱伺服电机,机械厂还 改进了产品质量,提高了整体竞争力。
05
三菱伺服电机的调试与维护
调试步骤及方法
准备工作
熟悉三菱伺服电机的技术手册和 调试程序,准备好所需的调试工 具和设备。
控制器设置
根据技术手册设置伺服控制器的 参数,包括位置、速度和加速度 等。
电源检查
检查电源是否稳定,电压是否在 规定范围内,电缆连接是否正确 。
三菱数控伺服驱动参数设定与调整
三菱数控伺服驱动参数设定与调整作者:陈泽南来源:《佛山陶瓷》2012年第07期摘要:本文分析了三菱数控伺服驱动控制原理及相关伺服参数作用与关系,阐述了伺服驱动参数调整要领及相关伺服驱动参数设定与调整方法。
实践证明,通过对伺服驱动参数的最佳化调整,解决了铣面光洁度差、加工面有刀痕等问题。
关键词:三菱数控;伺服驱动参数;调整1 引言数控机床伺服驱动参数调整的好坏,直接影响到机床的加工精度和性能。
很多数控机床在出厂前,都进行过伺服驱动参数基本设定,能满足一般精度的加工要求。
但在动态性能要求高的模具加工中,由于伺服驱动参数没有进行最佳调整,造成电气系统与机械特性匹配不合理,导致加工中出现质量问题。
例如,铣球面光洁度差、加工圆弧呈椭圆、加工面在象限切换处出现刀痕等等。
根据三菱数控系统的特点,笔者总结了伺服驱动参数调整要领及伺服驱动参数设定与调整方法。
2 伺服驱动参数分析三菱伺服驱动控制原理如图1所示。
三菱伺服驱动系统采用图1所示的三环控制方式。
整个控制流程是通过位置环到速度环,再到电流环,最终到伺服电机。
而伺服电机则将电流信号和速度信号分别反馈给电流环和速度环、位置环,从而实现快速、准确的运动控制。
2.1 电流环电流环的作用是限制最大电流,使系统有足够大的加速扭矩。
电流环控制参数主要包含电流回路q轴进给补偿#2209、电流回路d轴进给补偿#2210、电流回路q 轴增益#2211、电流回路d轴增益#2212,这些参数由伺服电机的电气特性决定的,根据电机型号设定相对应的标准值。
2.2 速度环速度环的作用是抑制速度波动,增强系统抗负载扰动的能力。
速度环控制参数主要有:速度回路增益1(#2205,简称:VGN1)、速度回路增益2(#2206,简称:VGN2)、速度回路延迟补偿(#2207,简称:VIL)、速度回路进给补偿(#2208,简称:VIA)。
速度回路增益1,是决定伺服控制响应性的重要参数,对机床的切削精度和切削循环时间有很大的影响,增大设定值则控制精度相应提高,但机械容易发生振动。
三菱交流伺服电机报价
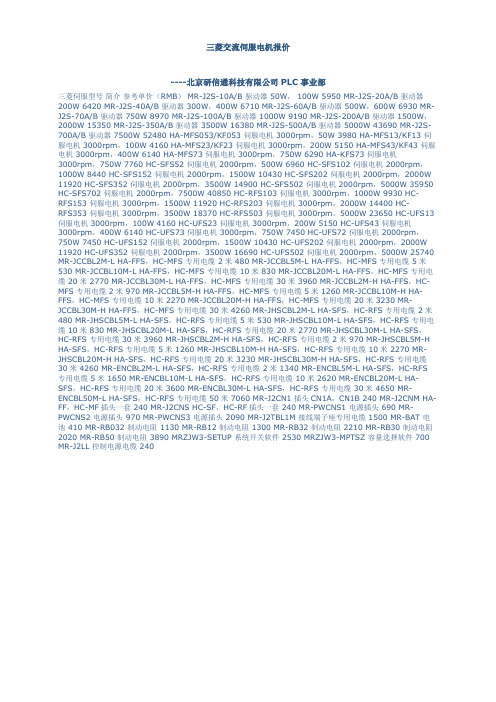
三菱交流伺服电机报价----北京研信通科技有限公司PLC事业部三菱伺服型号简介参考单价(RMB) MR-J2S-10A/B 驱动器 50W, 100W 5950 MR-J2S-20A/B 驱动器200W 6420 MR-J2S-40A/B 驱动器 300W,400W 6710 MR-J2S-60A/B 驱动器 500W,600W 6930 MR-J2S-70A/B 驱动器 750W 8970 MR-J2S-100A/B 驱动器 1000W 9190 MR-J2S-200A/B 驱动器 1500W,2000W 15350 MR-J2S-350A/B 驱动器 3500W 16380 MR-J2S-500A/B 驱动器 5000W 43690 MR-J2S-700A/B 驱动器 7500W 52480 HA-MFS053/KF053 伺服电机 3000rpm,50W 3980 HA-MFS13/KF13 伺服电机 3000rpm,100W 4160 HA-MFS23/KF23 伺服电机 3000rpm,200W 5150 HA-MFS43/KF43 伺服电机 3000rpm,400W 6140 HA-MFS73 伺服电机 3000rpm,750W 6290 HA-KFS73 伺服电机3000rpm,750W 7760 HC-SFS52 伺服电机 2000rpm,500W 6960 HC-SFS102 伺服电机 2000rpm,1000W 8440 HC-SFS152 伺服电机 2000rpm,1500W 10430 HC-SFS202 伺服电机 2000rpm,2000W 11920 HC-SFS352 伺服电机 2000rpm,3500W 14900 HC-SFS502 伺服电机 2000rpm,5000W 35950 HC-SFS702 伺服电机 2000rpm,7500W 40850 HC-RFS103 伺服电机 3000rpm,1000W 9930 HC-RFS153 伺服电机 3000rpm,1500W 11920 HC-RFS203 伺服电机 3000rpm,2000W 14400 HC-RFS353 伺服电机 3000rpm,3500W 18370 HC-RFS503 伺服电机 3000rpm,5000W 23650 HC-UFS13 伺服电机 3000rpm,100W 4160 HC-UFS23 伺服电机 3000rpm,200W 5150 HC-UFS43 伺服电机3000rpm,400W 6140 HC-UFS73 伺服电机 3000rpm,750W 7450 HC-UFS72 伺服电机 2000rpm,750W 7450 HC-UFS152 伺服电机 2000rpm,1500W 10430 HC-UFS202 伺服电机 2000rpm,2000W 11920 HC-UFS352 伺服电机 2000rpm,3500W 16690 HC-UFS502 伺服电机 2000rpm,5000W 25740 MR-JCCBL2M-L HA-FFS,HC-MFS 专用电缆 2米 480 MR-JCCBL5M-L HA-FFS,HC-MFS 专用电缆 5米530 MR-JCCBL10M-L HA-FFS,HC-MFS 专用电缆 10米 830 MR-JCCBL20M-L HA-FFS,HC-MFS 专用电缆 20米 2770 MR-JCCBL30M-L HA-FFS,HC-MFS 专用电缆 30米 3960 MR-JCCBL2M-H HA-FFS,HC-MFS 专用电缆 2米 970 MR-JCCBL5M-H HA-FFS,HC-MFS 专用电缆 5米 1260 MR-JCCBL10M-H HA-FFS,HC-MFS 专用电缆 10米 2270 MR-JCCBL20M-H HA-FFS,HC-MFS 专用电缆 20米 3230 MR-JCCBL30M-H HA-FFS,HC-MFS 专用电缆 30米 4260 MR-JHSCBL2M-L HA-SFS,HC-RFS 专用电缆 2米480 MR-JHSCBL5M-L HA-SFS,HC-RFS 专用电缆 5米 530 MR-JHSCBL10M-L HA-SFS,HC-RFS 专用电缆 10米 830 MR-JHSCBL20M-L HA-SFS,HC-RFS 专用电缆 20米 2770 MR-JHSCBL30M-L HA-SFS,HC-RFS 专用电缆 30米 3960 MR-JHSCBL2M-H HA-SFS,HC-RFS 专用电缆 2米 970 MR-JHSCBL5M-H HA-SFS,HC-RFS 专用电缆 5米 1260 MR-JHSCBL10M-H HA-SFS,HC-RFS 专用电缆 10米 2270 MR-JHSCBL20M-H HA-SFS,HC-RFS 专用电缆 20米 3230 MR-JHSCBL30M-H HA-SFS,HC-RFS 专用电缆30米 4260 MR-ENCBL2M-L HA-SFS,HC-RFS 专用电缆 2米 1340 MR-ENCBL5M-L HA-SFS,HC-RFS 专用电缆 5米 1650 MR-ENCBL10M-L HA-SFS,HC-RFS 专用电缆 10米 2620 MR-ENCBL20M-L HA-SFS,HC-RFS 专用电缆 20米 3600 MR-ENCBL30M-L HA-SFS,HC-RFS 专用电缆 30米 4650 MR-ENCBL50M-L HA-SFS,HC-RFS 专用电缆 50米 7060 MR-J2CN1 插头CN1A,CN1B 240 MR-J2CNM HA-FF,HC-MF插头一套 240 MR-J2CNS HC-SF,HC-RF插头一套 240 MR-PWCNS1 电源插头 690 MR-PWCNS2 电源插头 970 MR-PWCNS3 电源插头 2090 MR-J2TBL1M 接线端子座专用电缆 1500 MR-BAT 电池 410 MR-RB032 制动电阻 1130 MR-RB12 制动电阻 1300 MR-RB32 制动电阻 2210 MR-RB30 制动电阻2020 MR-RB50 制动电阻 3890 MRZJW3-SETUP 系统开关软件 2530 MRZJW3-MPTSZ 容量选择软件 700 MR-J2LL 控制电源电缆 240。
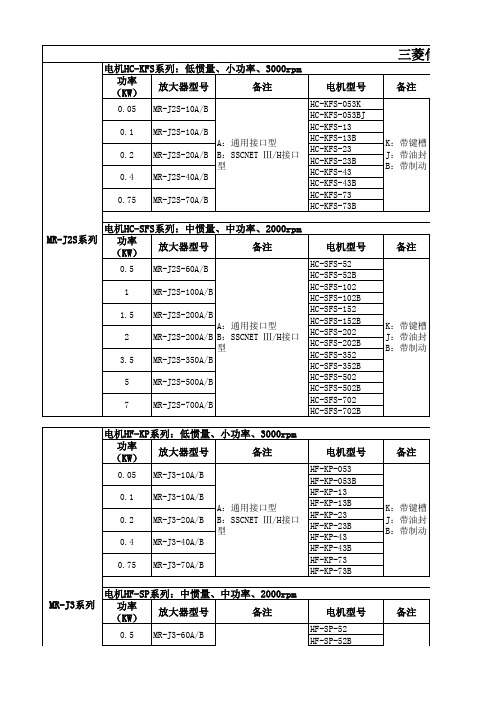
三菱伺服系统型号及功能参数

三菱伺服系统型号及功能参数三菱伺服系统型号大全MR-J2S系列伺服电机伺服驱动器HC-KFS13 /MR-J2S-10AHC-KFS23 /MR-J2S-20AHC-KFS43 /MR-J2S-40AHC-KFS73 /MR-J2S-70AHC-SFS52 /MR-J2S-60AHC-SFS102 /MR-J2S-100AHC-SFS152 /MR-J2S-200AHC-SFS202 /MR-J2S-200AHC-SFS352 /MR-J2S-350AHC-SFS502 /MR-J2S-500AHC-SFS702 /MR-J2S-700AMR-J3系列HF-KP13 /MR-J3-10AHF-KP23 /MR-J3-20AHF-KP43 /MR-J3-40AHF-KP73 /MR-J3-70AHF-SP52 /MR-J3-60AHF-SP102 /MR-J3-100AHF-SP152 /MR-J3-200AHF-SP202 /MR-J3-200AHF-SP352 /MR-J3-350AHF-SP502 /MR-J3-500AHF-SP702 /MR-J3-700AMR-E系列HF-KE13 /MR-E-10AHF-KE23 /MR-E-20AHF-KE43 /MR-E-40AHF-KE73 /MR-E-70AHF-SE52 /MR-E-70AHF-SE102 /MR-E-100AHF-SE152 /MR-E-200AHF-SE202 /MR-E-200A伺服器:三菱伺服:MJ-J2 MR-S2 MR-S3 MR-H MR-JXXA MDS-B-SP MDS-C1-CV MDS-B-CV MDS-B-V1 MDS-B-V2 MDS-C1-V24 MR-B-SVJ2 MR-A-CV MDS-A-CR MDS-B-CVE MR-SB FR-SF-2 MR-SA MDS-B-V14L FR-SGJ-2 FR-CV FCVA-MP10 FANUC三菱伺服电机的分类交流伺服系统分类:主要的系列有:MR-J、MR-H、MR-C系列;MR-J2系列;MR-J2S系列;MR-E系列;MR-J3系列;MR-ES系列。
三菱交流伺服电机的选择解读

三菱交流伺服电机的选择杨世方基本理论对伺服驱动来讲,应当首先考虑的是:1,最大速度或最大转矩下所需的功率2,启动、停止过渡过程中所通的功率而对伺服电机来讲,由于其使用目的主要还在于后者,即主要是根据负载加减速时所需要的动力(功率)来决定马达大小,因此主要依据是:(1)负载的惯性大小(2)合理选取传动比电机选取则主要依据功率速率(比功率)下面看一个选取例:T L J符号说明:T M:电动机轴上所需的电机扭矩[N-m]J M: 电动机轴上的电机转动惯量[kg-m2] (=GD2/4)R :传动比R〉1 减速R= 1 等速R< 1 增速η:传动效率≤ 1T L:负载轴扭矩[N-m]J L :负载轴上的负载的转动惯量[kg-m2] 千克米2α:负载轴角加速度Lα:经过传动比为R的传动,为使负载轴得到角加速度αL M在电机轴上的角加速度αMα= RαLM起动时所需电机转矩T M为下列几相之和(1)用于电机本身加速的加速转矩T1[N-m](2)使负荷加速的转矩T2[N-m](3)为使负载轴(经过传动装置)得到转矩T L 所需要的转矩T3[N-m] T2和T3 不同,T3是正常运行时所需转矩则:T1= J M ·αM = J M ·R·αL根据,η·R·T2 = J L ·αL (牛顿定律)负载加速转矩:T2=(J L ·αL)/η·R正常运行时电机提供转矩:T3= T L/η·R电机起动转矩T M ≥T1+T2+T3 ≥J M ·R·αL +{(J L ·αL)+T L/η·R}---------(1) 对上式右侧求R的偏微分,并使其等于零,即可求得(1)式右变最小值时的R0∂ T M / ∂ R =0R0= (J L ·αL+T L)/ J M·αL·η ------------------ (2)R0 称为最佳传动比,就是能使T M最小的传动比,选取这个传动比,电机所需的起动矩扭最小。
伺服控制器的选型原则

伺服控制器的选型原则伺服控制器是一种广泛应用于各个工业领域的控制设备,它能够通过精确的反馈控制系统,实现对电机和机械系统的高精度控制。
在选择适合的伺服控制器时,需要考虑多个因素,以确保系统的性能和稳定性。
本文将介绍一些常见的伺服控制器的选型原则,帮助读者在实际应用中作出明智的选择。
一、动态响应要求伺服控制器的动态响应能力直接影响到系统的精度和稳定性。
通常情况下,动态响应要求越高,对控制器的性能要求也越高。
对于需要快速响应的应用,如高速运动控制、精密加工等领域,应选择具有快速响应和高带宽的伺服控制器。
而对于一些速度较低、要求相对宽松的应用,如慢速包装机械、输送带等,可以选择性能相对较低的伺服控制器。
二、负载特性负载特性是指受控对象的特性,包括负载惯性、负载扭矩等。
不同的负载特性对伺服控制器的要求也有所不同。
对于惯性较大的负载,需要选择具有较强驱动能力和良好过载能力的伺服控制器,以确保系统的稳定性。
对于需要较大扭矩的负载,应选择具有高输出扭矩的伺服控制器,以满足系统的需求。
三、通信接口要求现代伺服控制器通常都具备各种通信接口,如RS232、RS485、以太网等。
根据实际需求,选择合适的通信接口对于系统的整体性能是非常重要的。
如果需要与其他设备进行联网控制或实时监控,应选择具备以太网接口的伺服控制器。
如果只是需要与PC进行简单的数据传输,可以选择RS232或RS485接口。
四、可编程性对于某些特殊应用,可能需要对伺服控制器进行一定程度的定制和编程。
在选择伺服控制器时,应注意其是否具备可编程性能,并提供相应的开发工具和接口。
可编程的伺服控制器可以根据实际需求进行灵活的配置和调整,提高系统的适应性和可靠性。
五、成本和可靠性成本和可靠性是伺服控制器选型时需要综合考虑的因素之一。
价格高不一定意味着性能好,低廉的伺服控制器也可能存在使用寿命短、易损坏等问题。
在选型过程中,需要综合考虑成本和可靠性因素,选择性价比较高的伺服控制器。
三菱MR-J3S驱动器接线图及参数调整
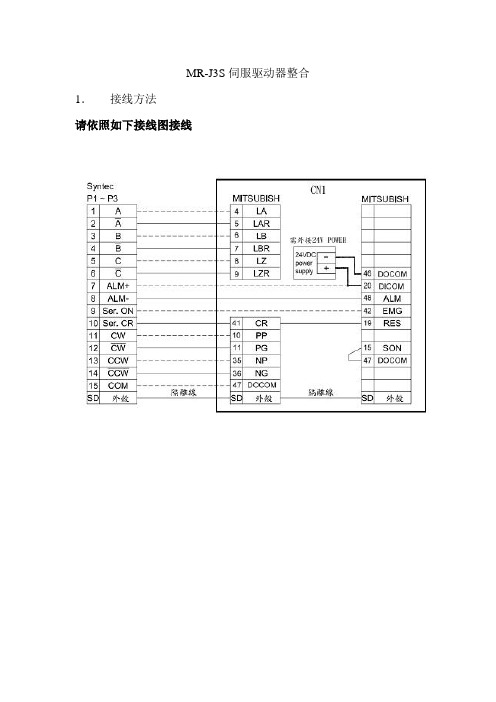
MR-J3S伺服驱动器整合1.接线方法
请依照如下接线图接线
2.参数调整
以下为供参考的建议参数值,基本参数一般不变,增益滤波器参数视不同的机台有所改变
MR-J3伺服参数表
(注:简称前面带有*的参数,设定后将电源断开,再重新接通电源,参数生效。
)
3.自动调谐方法和步骤
a.PA08设0001,PA09先设一个初始值,如:18;
b.手动或自动让该轴空跑,速度保证在让马达在1000RPM,比如螺距为
5mm的,则机台该轴向线速度保证在5000MM/MIN,并且至少要有一段
距离是等速运动,看机台是否会抖,有没有共振的声音发出,如果没有,则加大PA09再做;如果有,则说明PA09设定过大,则减小该值再试一
次,直到测试到一个合理的不响的值,有的时候如果觉得机台刚性太低
且又响,可以考虑打开滤波功能(PB13);
c.把PA08设0003,到此自动调谐以完成;
d.每个轴向可以设不同的PA09做自动调谐。
4.刚性调整
做好自动调谐后,就可以进行刚性调整了,相关参数有:
PB07:PG1 模型环增益
PB08:PG2 位置环增益
PB09:VG2 速度环增益
PB10:VIC 速度微分补偿
通常情况下,PB07、PB08、PB09相对调大,机台刚性高,响应快,加工好,但是过大机台会抖;PB10相对调小,机台刚性高,响应快,加工好,但是过大可能会导致机台抖动。
三菱伺服电机选型
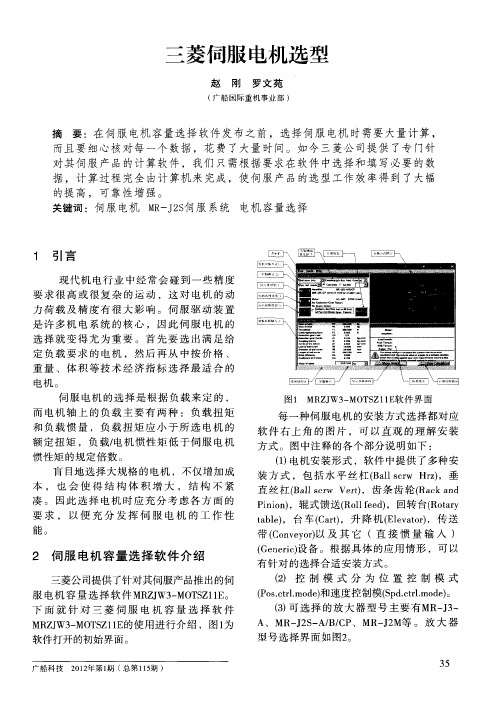
() 4 可选 择 的 电机 系列 主要 有HC K Sd — F (x
功 率 、低 惯 量 ) 、HC MF 小 功 率 超 低 惯 — S( 量 )、HC S S( — F 中功率 、中惯 量 )等 。伺
服 电机型号 系列 选择 界面 如 图3 。
速度时要考虑是 否有减 速器 。 ( 负 载参 数设 置 6 ) 工 作 台重 量 Ma s fa l1 s be ot 负 载重量 Mas fod s o la ) 施 加在运 动部 分轴 向的力(hu t a 1 T r s o d l 导 轨预 紧力( ud g tnn re G ie ihe ig oc 1 t f 减 速 比( e u t n e rai1 R d ci a t og r o 减 速箱 惯量 ( e u t n e rn r a R d ci a et 1 o g i i 联 轴器 惯量( o pig n r a C u l et 1 n i i 其 它 负载惯 量( et fh h r1 I r a e tes n iot o 滚 珠 丝杆导 程(e d f alce ) L a lsrw ob 滚珠 丝杆直 径( imee lsrw D a tr f al ce ) ob 滚珠 丝杆长 度(e gho lsrw L n t b l ce 1 fa 驱动 效率( r e f ce c1 D i f in y v ei 摩擦 系数( of ce t fr t n C ef in i i 1 i ofc o 以上 参数 在参 数输入 框 中输入 。 () 装 减 速器 选 择 ,联 轴 器+ 7安 减速 器 形 式 (c u l gy+ x. e . e r 】 ; 联 轴 o pi [】E t dG a[ ) n R y 器 形 式( o pigy+ x.e . er ] C u l [lE t dG a[ 1 n R n ;减 速 器 形式 ( 0 pign+ x.e . er ] c u l [JE t dG a[ ) n R y