三菱伺服马达选型
伺服马达的选用设计和转动惯量的计算
举例计算1
这种传动方式与前一种传动方式相同,选型时主要考虑负载 惯量的计算,计算公式也与前面相同。 总结:转动型负载主要考虑惯量计算。
1:R2
举例计算2
M
D
1:R1 已知:负载重量M=50kg,同步带轮直径D=120mm, 减速比R1=10,R2=2,负载与机台摩擦系数µ=0.6, 负载最高运动速度30m/min,负载从静止加速到最高 速度时间200ms,忽略各传送带轮重量,驱动这样的 负载最少需要多大功率电机?
举例计算3
3. 计算电机驱动负载所需要的扭矩 另一种计算所需加速扭矩的方法: TA= 2π* N * (JW + JB) / (60 * t1) / η
= 6.28 * 1500 * 0.014529 / 12 / 0.9 = 12.672 N.m 计算瞬时最大扭矩: 加速扭矩Ta = TA + Tf = 14.059 N.m 匀速扭矩Tb = Tf = 1.387 N.m 减速扭矩Tc = TA – Tf = 11.285 N.m 实效扭矩Trms = sqrt[(Ta2*t1 + Tb2*t2 + Tc2*t3) / (t1+t2+t3)]
举例计算3 1. 计算折算到电机轴上的负载惯量 重物折算到电机轴上的转动惯量JW = M * ( PB / 2π)2
= 200 * (2 / 6.28)2 = 20.29 kg.cm2 螺杆转动惯量JB = MB * DB2 / 8 = 40 * 25 / 8 = 125 kg.cm2 总负载惯量JL = JW + JB = 145.29 kg.cm2
F
r
θ
r sin 作用線
r F s i n F ( r s i n ) 力 量 力 臂
三菱数控系统中交流伺服电机的选择_魏胜

表 2 3 种电机型号的电机惯量
电机 电机惯量 负载惯量 负载惯 判
型号 /(kg·cm2) /(kg·cm2) 量倍率 定
HA80N
20.3
20.35
1.01 √
HA100N 72.8
20.35
0.53 √
HA200N
135
20.35
0.29 √
3 短时间特性(加减速时间常数) 的计算
其中,JM 表示电机惯量(带制动);TMAX 表示 最大扭矩,二者的取值可由手册查出;
HA200N:Trms=TL
×
D
1 2
=7.76
×
0.29
1 2
=
4.18 ( N·m ),
( N·m )。
TSt × 80% = 16.7 × 80% = 13.36
综合表 2-4 所做出的判定结果,参照三菱电机
手册,选用 HA100N(2000r/min)型伺服电机,对
应伺服驱动器的型号为 SVJ2-20。
Selection of AC Servo Motor in Mitsubishi NC System
WEI Sheng, WANG Mingyou
(School of Mechanical and Electrical Engineering, Shenzhen Polytechnic, Shenzhen, Guangdong 518055, China)
Abstract: The selection of Servo motor should be in accordance with specific requirement. If servo motor does not match with machine, the former can neither perform its function, nor optimize the parameters. By working out the load inertia rate, acceleration, deceleration and sequence characteristics, the paper introduces the process of AC servo motor selection based on the selection principle of MITSUBISHI motor.
伺服电机如何进行选型
1、机电领域中伺服电机的选择原则现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
各种电机的T-ω曲线(1)传统的选择方法这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。
很显然。
电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。
用ω峰值,T峰值表示最大值或者峰值。
电机的最大速度决定了减速器减速比的上限,n ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限上限=大于n上限,选择的电机是不合适的。
反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。
只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。
(2)新的选择方法一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。
这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。
因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。
在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。
选择一个合适的传动比就能平衡这相反的两个方面。
三菱交流伺服电机的选择

三菱交流伺服电机的选择杨世方基本理论对伺服驱动来讲,应当首先考虑的是:1,最大速度或最大转矩下所需的功率2,启动、停止过渡过程中所通的功率而对伺服电机来讲,由于其使用目的主要还在于后者,即主要是根据负载加减速时所需要的动力(功率)来决定马达大小,因此主要依据是:(1)负载的惯性大小(2)合理选取传动比电机选取则主要依据功率速率(比功率)下面看一个选取例:T L J符号说明:T M:电动机轴上所需的电机扭矩[N-m]J M: 电动机轴上的电机转动惯量[kg-m2] (=GD2/4)R :传动比R〉1 减速R= 1 等速R< 1 增速η:传动效率≤ 1T L:负载轴扭矩[N-m]J L :负载轴上的负载的转动惯量[kg-m2] 千克米2α:负载轴角加速度Lα:经过传动比为R的传动,为使负载轴得到角加速度αL M在电机轴上的角加速度αMα= RαLM起动时所需电机转矩T M为下列几相之和(1)用于电机本身加速的加速转矩T1[N-m](2)使负荷加速的转矩T2[N-m](3)为使负载轴(经过传动装置)得到转矩T L 所需要的转矩T3[N-m]T2和T3 不同,T3是正常运行时所需转矩则:T1= J M ·αM = J M ·R·αL根据,η·R·T2 = J L ·αL (牛顿定律)负载加速转矩:T2=(J L ·αL)/η·R正常运行时电机提供转矩:T3= T L/η·R电机起动转矩T M ≥T1+T2+T3 ≥J M ·R·αL +{(J L ·αL)+T L/η·R}---------(1)对上式右侧求R的偏微分,并使其等于零,即可求得(1)式右变最小值时的R0∂ T M / ∂ R =0R0= (J L ·αL+T L)/ J M·αL·η ------------------ (2)R0 称为最佳传动比,就是能使T M最小的传动比,选取这个传动比,电机所需的起动矩扭最小。
伺服电机如何进行选型
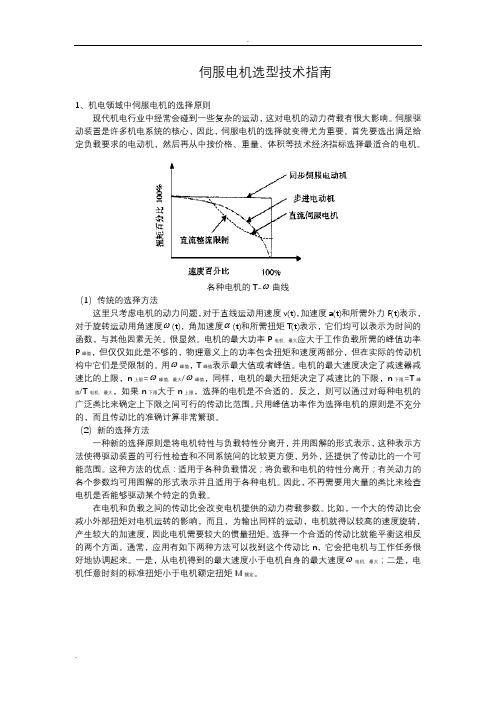
伺服电机选型技术指南1、机电领域中伺服电机的选择原则现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
各种电机的T-ω曲线(1)传统的选择方法这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。
很显然。
电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。
用ω峰值,T峰值表示最大值或者峰值。
电机的最大速度决定了减速器减速比的上限,n上限=ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。
反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。
只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。
(2)新的选择方法一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。
这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。
因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。
在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。
伺服电机选型原则是什么?有哪些注意事项?
伺服电机选型原则是什么?有哪些注意事项?为了满足机械设备对高精度、快速响应的要求,伺服电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压,还应具有较长时间的过载能力,以满足低速大转矩的要求,能够承受频繁启动、制动和正、反转,如果盲目地选择大规格的电机,不仅增加成本,也会使得设计设备的体积增大,结构不紧凑,因此选择电机时应充分考虑各方面的要求,以便充分发挥伺服电机的工作性能;下面小编为您介绍伺服电机选型原则与注意事项;伺服电机选型原则:1.首先,需要计算负载转矩,负载转矩的计算需要计算负载力,负载力可能是摩擦力,也可能是切削力,都要根据你的机械系统进行一个大致的计算。
负载转矩的单位是N.M 。
所以还要知道工件的转动直径(半径)。
2.然后根据工件的转动速度及负载质量计算出工件的转动惯量。
再然后需要把工件的负载转矩和转动惯量转换成主轴的转动惯量和负载转矩。
3.得到上述转矩和转动惯量后,便可以联系厂家确定所用电机了。
伺服电机的选型一般不看转速。
一个原则是选定电机的额定转矩×0.8比换算到电机轴负载转矩大的电机,TMx0.8>TL。
转动惯量:选定电机的转子·惯量为负载的1/3*以上的电机:JM≥JL/3。
4.最后需要确定一些细枝末节的东西,比如电机的输出轴要不要键,带不带刹车,防护等级,编码系统等等。
伺服电机选型注意事项:1.有些系统如传送装置,升降装置等要求伺服电机能尽快停车,而在故障、急停、电源断电时伺服器没有再生制动,无法对电机减速。
同时系统的机械惯量又较大,这时对动态制动器的要依据负载的轻重、电机的工作速度等进行选择。
2.有些系统要维持机械装置的静止位置,需电机提供较大的输出转矩,且停止的时间较长。
如果使用伺服的自锁功能,往往会造成电机过热或放大器过载,这种情况就要选择带电磁制动的电机。
3.有的伺服驱动器有内置的再生制动单元,但当再生制动较频繁时,可能引起直流母线电压过高,这时需另配再生制动电阻。
三菱伺服系统型号及功能参数概要
三菱伺服系统型号及功能参数三菱伺服系统型号大全MR-J2S系列伺服电机伺服驱动器HC-KFS13 /MR-J2S-10AHC-KFS23 /MR-J2S-20AHC-KFS43 /MR-J2S-40AHC-KFS73 /MR-J2S-70AHC-SFS52 /MR-J2S-60AHC-SFS102 /MR-J2S-100A HC-SFS152 /MR-J2S-200A HC-SFS202 /MR-J2S-200A HC-SFS352 /MR-J2S-350A HC-SFS502 /MR-J2S-500A HC-SFS702 /MR-J2S-700A MR-J3系列HF-KP13 /MR-J3-10AHF-KP23 /MR-J3-20AHF-KP43 /MR-J3-40AHF-KP73 /MR-J3-70AHF-SP52 /MR-J3-60AHF-SP102 /MR-J3-100AHF-SP152 /MR-J3-200AHF-SP202 /MR-J3-200AHF-SP352 /MR-J3-350AHF-SP502 /MR-J3-500AHF-SP702 /MR-J3-700AMR-E系列HF-KE13 /MR-E-10AHF-KE23 /MR-E-20AHF-KE43 /MR-E-40AHF-KE73 /MR-E-70AHF-SE52 /MR-E-70AHF-SE102 /MR-E-100AHF-SE152 /MR-E-200AHF-SE202 /MR-E-200A伺服器:三菱伺服:MJ-J2 MR-S2 MR-S3 MR-H MR-JXXA MDS-B-SP MDS-C1-CV MDS-B-CV MDS-B-V1 MDS-B-V2 MDS-C1-V24 MR-B-SVJ2 MR-A-CV MDS-A-CR MDS-B-CVE MR-SB FR-SF-2 MR-SA MDS-B-V14L FR-SGJ-2 FR-CV FCVA-MP10 FANUC三菱伺服电机的分类交流伺服系统分类:主要的系列有:MR-J、MR-H、MR-C系列;MR-J2系列;MR-J2S系列;MR-E 系列;MR-J3系列;MR-ES系列。
三棱伺服电机简介资料讲解

市场情况 常用 很常用 很常用 很常用 很常用 常用 常用 常用 常用 常用
市场情况 常用 很常用 很常用 很常用 很常用 常用 常用
三菱伺服系统MR-J2S系列
MR-J2S系列的伺服配套伺服电机编码器采用了分辨 率为131072脉冲/转的绝对位置编码器,所以比MR-J2系 列私服系统具有进行更高精度控制的能力,采用高性能的 CPU,大大提高产品的响应性,速度环路频率响应提高到 550HZ。多种系列的伺服电机适应不同控制需求,伺服电 机上的编码器均支持ABS模式,只要在伺服放大器上另加 电池,就能构成绝对位置系统。三菱伺服MR-J2S系列使 用更为方便,具有优异的自动调谐性能,机械分析功能, 可以轻松实现抑制机械振动,增益搜索功能,可以自动找 出最佳增益值。该产品还有RS-232和RS-422串行通讯功 能,通过安装有伺服设置软件的个人计算机就能进行参数 设定,试运行,状态显示和增益调整等操作。
参数序号名称和功能设定值注释p00电机和控制模式选择5010hcsfe系列1kw电机位置控制模式p01选择输入滤波器0002xy0012zp02自动调谐0105选择自动调谐响应速度p03电子齿轮分子32768xy16384z电子齿轮比电机分辨率p04电子齿轮分母1963xy125zp19参数写入禁止000e所有参数均可写入p21指令脉冲选择0001正逻辑带符号脉冲串p27编码器输出脉冲10000输出脉冲伺服电机每转分辨率设定值脉冲转p54编码器输出脉冲xy1z为0000y2为0001变更伺服电机旋转方向三菱伺服参数设置表三菱伺服电机推荐型号mrj3伺服电机mrj3伺服驱动器额定转速分辨率及惯性额定扭矩最大扭矩市场情况hfkp13mrj310a3000rmin262144分辨率低惯性032nm095nm常用hfkp23mrj320a3000rmin262144分辨率低惯性064nm19nm很常用hfkp43mrj340a3000rmin262144分辨率低惯性13nm38nm很常用hfkp73mrj370a3000rmin262144分辨率低惯性24nm72nm很常用hfsp102mrj3100a2000rmin262144分辨率中惯性477nm143nm很常用hfsp152mrj3200a2000rmin262144分辨率中惯性716nm215nm常用hfsp202mrj3200a2000rmin262144分辨率中惯性955nm286nm常用hfsp352mrj3350a2000rmin262144分辨率中惯性167nm286nm常用hfsp502mrj3500a2000rmin262144分辨率中惯性239nm716nm常用hfsp702mrj3700a2000rmin262144分辨率中惯性334nm100nm常用mres伺服电机mres伺服驱动器额定转速分辨率及惯性额定扭矩最大扭矩市场情况hfkn13js100mre10akh0033000rmin131072分辨率低惯性032nm095nm常用hfkn23js100mre20akh0033000rmin131072分辨率低惯性064nm19nm很常用hfkn43js100mre40akh0033000rmin131072分辨率低惯性13nm38nm很常用hfkn73js100mre70akh0033000rmin131072分辨率低惯性24nm72nm很
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
不带制动(总
伺服驱动器
MR-J4-10B
1台动力电缆
MR-PWS1CBL5M-A2-L 1根编码器电缆MR-J3ENCBL5M-A2-L 1根伺服电池
MR-BAT6V1SET 1只SSCNETⅢ光纤MR-J3BUS03M 1根(0.3M 可CN3接头MR-CCN11只伺服电机HG-KR13BJ 1台伺服驱动器
MR-J4-10B
1台动力电缆MR-PWS1CBL5M-A2-L 1根编码器电缆MR-J3ENCBL5M-A2-L 1根伺服电池
MR-BAT6V1SET 1只SSCNETⅢ光纤MR-J3BUS03M 1根(0.3M 可CN3接头MR-CCN11只伺服电机HG-KR73JK 1台伺服驱动器
MR-J4-70B
1台动力电缆MR-PWS1CBL5M-A2-L 1根编码器电缆MR-J3ENCBL5M-A2-L 1根伺服电池
MR-BAT6V1SET 1只SSCNETⅢ光纤MR-J3BUS03M 1根(0.3M 可CN3接头MR-CCN11只伺服电机HG-KR73BJK 1台伺服驱动器
MR-J4-70B
1台动力电缆MR-PWS1CBL5M-A2-L 1根编码器电缆MR-J3ENCBL5M-A2-L 1根伺服电池
MR-BAT6V1SET 1只SSCNETⅢ光纤MR-J3BUS03M 1根(0.3M 可CN3接头MR-CCN11只伺服电机HG-SR102K 1台伺服驱动器
MR-J4-100B 1台动力电缆接头MR-PWCNS4
1个
750W 不带
制动(总线型)
750W 带制
动(总线型)
1000W 不带制动(总线型)
100W 不带
制动(总线型)
100W 带制
动(总线型)
编码器电缆
MR-J3ENSCBL5M-A2-L 1根伺服电池
MR-BAT6V1SET 1只SSCNETⅢ光纤MR-J3BUS03M 1根
(0.3M 可CN3接头
MR-CCN1
1只
1000W 不带制动
(总线型)。