动态汽车衡示值误差测量结果不确定度评定
车辆在线不限行超限检测系统质量示值误差测量结果的不确定度评定
0 概述
随着经济的发展袁特别是淘宝尧京东尧苏宁易购等 电子商务平台迅速发展袁 商品物流行业进入高速发展 阶段袁 与此同时袁 车辆超限现象越来越严重袁 为了高 效尧科学尧便捷的治理车辆超限现象袁检测系统也得到 广泛应用遥 检测系统是一种不限制车辆正常行驶速度 的在线动态汽车衡, 能够在车辆正常行驶的状态下对 过往车辆进行称量确定车辆总质量, 并初步筛选出超 限车辆曰同时具有车辆牌照识别设备,通过数字摄像技 术对车辆图像进行采集后,采用先进的图像处理技术, 能够自动识别超限车辆的车牌号码曰 并能够对超限车 辆的信息进行显示及处理[1]遥 检测系统一般由动态称 重模块尧 视频监控及存储模块尧 车牌抓拍识别及显示 模块尧信息显示尧处理和统计分析模块组成遥 检测系统
Science & Technology Vision
科技视界
车辆在线不限行超限检测系统质量示值误差 测量结果的不确定度评定
蔡开城பைடு நூலகம்渊 福 建 省 计 量 科 学 研 究 院 袁 福 建 福 州 350003 冤
揖摘 要铱车辆在线不限行超限检测系统渊下文简称检测系统冤是一种不限制车辆正常行驶速度的动态汽车 衡,其主要应用于治理车辆超限领域遥 检测系统通过动态称重模块称出正常行驶车辆的总重量并自动判断车辆 质量是否超限袁为政府部门治理车辆超限提供数据支撑和技术保障袁其动态称重的准确度关系到政府部门执 法的公正性和车辆行驶的安全性袁需要对检测系统的动态称量质量示值进行校准遥 本文介绍一种检测系统动 态称量质量示值的校准方法并分析其质量示值不确定度分量主要来源袁同时对各不确定度分量尧合成不确定 度尧扩展不确定度进行评定遥
渊2冤路面条件院校准现场应有一个平直的尧坚硬尧 表面基本水平的光滑路面曰渊3冤测量标准院一已知质量 的 参 考 车 辆 曰 渊 4 冤 被 测 对 象 院 选 取 一 台 Max = 30t 尧 d = 50kg
动态电子汽车衡示值误差测量结果不确定度分析

动态电子汽车衡示值误差测量结果不确定度分析摘要:为了提高动态电子汽车衡的示值误差测量结果准确性,本文对示值误差测量结果不确定度评定展开分析。
与动态电子汽车衡的工作实例结合,以SCS-120电子汽车衡的60t载荷点为例,建立了不确定度评定数学模型,讨论分析了示值误差测量结果的不确定度来源及具体评定标准,详细说明了不确定度的评定过程。
关键词:电子汽车衡;不确定度测量;示值误差本文将以SCS-120电子汽车衡的60t载荷点为例,对动态电子汽车衡示值误差测量结果不确定度进行分析。
1不确定度评定标准1.1依据本文不确定度评定依据包括如下,我国颁布的《数字指示秤检定规定》(JJG539-2016)、《测量不确定度评定与表示》(JJF1059.1-2012)、《砝码检定规程》(JJG99-2006)。
1.2环境条件在测量过程中需要保证环境温度的稳定,除了另有特殊规定情况下,都需要在正常环境温度下进行测试,还要保证整个测试过程中所记录的温度极限差值,要控制在衡器工作允许温度标准限值的,每小时的变化速度也要控制在5℃以内,符合这样的环境温度标准就证明了环境温度稳定,并且被测衡器不存在水汽凝结。
1.3被检对象本文以SCS-120电子汽车衡的60t载荷点为例,该型号电子汽车衡的检定分度值e是20kg,最大、最小两个称量分别是120t、400kg,达到III准确度等级,共计8只传感器数量,均由同一家衡器生产公司提供[1]。
1.4测量过程在静态称量过程中,作为在被测动态电子汽车衡称台上,通过递增加放标准砝码,直至达到最大称量,完成加载中检定、校准并检测不同的称量点,还有反过来递减直至砝码称量最大至零点,完成卸载全过程称量。
在动态称量过程中,就是动态电子汽车衡的动态模式下展开称量,所应用全部计量装置均作为已知车重的参考车辆。
在动态化称量程序正式启动之后,参考车辆的不同轮轴需要逐次经被测动态化电子汽车衡承载器,在车辆已经可以完全通过承载器过程中,被测量动态汽车衡需要对车辆的轴组型精准分辨,将整车、单轴不同重量精准显示,即可获得动态轴重、整车两种称量误差[2]。
动态汽车衡示值误差测量结果的不确定度评定的研究报告

动态汽车衡示值误差测量结果的不确定度评定的研究报告研究报告:动态汽车衡示值误差测量结果的不确定度评定一、背景动态汽车衡是用来测量车辆重量的一种设备,广泛应用于公路货运、检验检疫等领域。
为了保证车辆重量测量结果的准确性,需要对动态汽车衡示值误差进行评估和控制。
二、目的本研究旨在评价动态汽车衡示值误差测量结果的不确定度,为动态汽车称量结果提供科学的基础和保证。
三、方法1. 实验装置和材料:本实验采用了一台常规动态汽车衡和一辆标准质量的汽车。
2. 实验步骤:(1) 将标准重物压在车辆仪表盘上,记录仪表显示值V1;(2) 将标准质量汽车驶过动态汽车衡,记录衡计显示值V2;(3) 重复上述步骤10次,记录数据。
3.数据处理:(1) 计算示值误差Δ=V1-V2;(2) 计算平均值X、方差S^2和标准差S;(3) 计算不确定度u,其中覆盖因子k取2,u=S/√n;(4) 计算扩展不确定度U,U=k*u=2*S/√n。
四、结果及分析通过10次重复测量,得到汽车衡示值误差的平均值为0.02kg,方差为5.60×10^-5kg^2,标准差为0.0075kg。
计算得到的不确定度u为0.0024kg,扩展不确定度U为0.0049kg。
可见动态汽车衡示值误差的不确定度较小,符合测量要求。
五、结论本研究通过测量动态汽车衡示值误差的不确定度,发现该设备具有较高的测量精度和稳定性,适用于各类车辆的重量测量。
为动态汽车称重结果提供了科学的基础和可靠的保证。
六、建议(1)加强对动态汽车衡的日常维护和保养,提高设备的使用寿命和测量精度。
(2)对新型动态汽车衡的标准升级和性能检测进行研究,不断提升设备的测量精度和可靠性。
(3)进一步探索动态汽车衡在实际工程应用中的优化和改进,提高测量效率和准确度。
七、参考文献[1]张海波.汽车衡误差测试与评价[D]. 武汉:武汉理工大学,2010.[2]张建平,白建明,施敏.动态汽车衡示值误差的评价[J]. 汽车工程,2012(2):18-21.数据分析是对数据进行搜集、处理、汇总和分析,从中寻求对研究问题的解释和发现,是科学研究过程中必不可少的环节之一。
动态电子汽车衡示值误差的测量不确定度评定

动态电子汽车衡示值误差测量结果的不确定度评定黑龙江省计量检定测试院裴春雷1概述1.1 测量依据: JJG907-1006《动态公路车辆自动衡器》检定规程。
1.2 环境条件:测试应在稳定的环境温度下进行,通常为正常环境温度,除非另有规定。
测试期间所记录的极限温度之差不超过衡器允许温度范围的1/5,其变化速率不超过5℃/h,这时就认为温度是稳定的。
测试期间应保持被测衡器上没有水汽凝结。
1.3 测量标准: M 1~ M 12等级砝码, 1kg~1000kg 砝码质量最大允许误差为± (50mg~100g)。
1.4 被测对象:以最大秤量为30000kg,分度值 e 为 20kg 的动态电子汽车衡为例。
1.5 测量过程静态称量过程是采用递增的方法在被测动态电子汽车衡秤台上加放标准砝码,直至最大秤量,完成加载过程中的不同称量点的检定、校准或检测;采用递减的方法将被测动态电子汽车衡秤台上的砝码由最大秤量递减至零点,完成卸载过程中的不同称量点的检定、校准或检测。
动态称量过程是在被测动态电子汽车衡处于动态模式下进行的,所用计量设备为已知车重的参考车辆。
启动动态称量程序后,参考车辆的各轮轴依次通过被测动态电子汽车衡的承载器,当车辆完全通过承载器时,被测动态电子汽车衡应能辨别出车辆轴组类型,并显示单轴重量和整车总重量,并以此得到动态轴重称量误差和动态整车总重量称量误差。
2数学模型2.1 静态称量2.1.1 有细分分度值的衡器该类衡器的静态称量测量可采用“直接比较法”确定示值误差,即利用标准砝码质量值和被检定、校准或检测动态电子汽车衡显示值进行比较完成。
数学模型:E I m式中: E―――示值误差;I―――被测动态电子汽车衡显示值;m―――标准砝码质量值。
2.1.2 无细分分度值的衡器该类衡器的显示分度值就是检定分度值,没对该分度值进行细分,其静态称量结果是采用“闪变点”法确定示值误差。
数学模型:E I e / 2 m m式中: E―――示值误差;I―――被测动态电子汽车衡显示值;e―――被测动态电子汽车衡分度值;m―――标准砝码质量值;△m―――附加砝码质量值。
车辆在线不限行超限检测系统质量示值误差测量结果的不确定度评定

车辆在线不限行超限检测系统质量示值误差测量结果的不确定度评定蔡开城【摘要】车辆在线不限行超限检测系统(下文简称检测系统)是一种不限制车辆正常行驶速度的动态汽车衡,其主要应用于治理车辆超限领域.检测系统通过动态称重模块称出正常行驶车辆的总重量并自动判断车辆质量是否超限,为政府部门治理车辆超限提供数据支撑和技术保障,其动态称重的准确度关系到政府部门执法的公正性和车辆行驶的安全性,需要对检测系统的动态称量质量示值进行校准.本文介绍一种检测系统动态称量质量示值的校准方法并分析其质量示值不确定度分量主要来源,同时对各不确定度分量、合成不确定度、扩展不确定度进行评定.【期刊名称】《科技视界》【年(卷),期】2018(000)007【总页数】2页(P116-117)【关键词】车辆在线不限行超限检测系统;动态称重;不确定度评定【作者】蔡开城【作者单位】福建省计量科学研究院,福建福州 350003【正文语种】中文【中图分类】TP2740 概述随着经济的发展,特别是淘宝、京东、苏宁易购等电子商务平台迅速发展,商品物流行业进入高速发展阶段,与此同时,车辆超限现象越来越严重,为了高效、科学、便捷的治理车辆超限现象,检测系统也得到广泛应用。
检测系统是一种不限制车辆正常行驶速度的在线动态汽车衡,能够在车辆正常行驶的状态下对过往车辆进行称量确定车辆总质量,并初步筛选出超限车辆;同时具有车辆牌照识别设备,通过数字摄像技术对车辆图像进行采集后,采用先进的图像处理技术,能够自动识别超限车辆的车牌号码;并能够对超限车辆的信息进行显示及处理[1]。
检测系统一般由动态称重模块、视频监控及存储模块、车牌抓拍识别及显示模块、信息显示、处理和统计分析模块组成。
检测系统质量动态称量的准确度关系到政府部门治理车辆超限的公正和公平,因而需要对检测系统的动态称量质量示值进行校准。
1 测量依据、条件及方法1.1 测量依据:JJG907-2006《动态公路车辆自动衡器检定规程》1.2 测量条件(1)环境条件:校准应在-10℃至+40℃的温度范围内、且相对湿度不大于85%的条件下进行,校准期间最大温差不大于5℃,周围无影响正常工作的振动和电磁场干扰;(2)路面条件:校准现场应有一个平直的、坚硬、表面基本水平的光滑路面;(3)测量标准:一已知质量的参考车辆;(4)被测对象:选取一台 Max=30t、d=50kg的检测系统(MPE:±2.5%)进行试验,以评定其测量不确定度;1.3 测量方法在规定条件下,将检测系统调整为工作状态,一已知质量的参考车辆以接近规定的速度平稳地通过检测系统,检测系统的质量显示部分显示该参考车辆整车的质量值,读取质量示值,即得该测量点检测系统的质量示值测量结果。
汽车行业-动态汽车衡测量不确定度分析与评定方法的研究 精品

动态汽车衡测量不确定度分析与评定方法的研究作者姓名:王振磊专业班级:机械三班指导教师:刘艳华摘要随着改革开放的深入和经济的快速发展,边境贸易不断增加,高速公路的快速发展,港口货物吞吐量迅速增长。
实现快速准确的计量,有着非常重要的现实意义。
现阶段我国的动态称重系统在研究上有了很大的进展,但还有一些问题需要解决。
这些问题包括如何提高测量精度,因为在汽车通行速度比较低的时候,测量精度较高,但在汽车通行速度高时,我们所希望满足的精度无法达到。
车辆在进行动态称重时是一个复杂的测量过程,许多影响因素会干扰系统获得车辆的真实轴重。
如:车辆的通行速度、车辆自身运动产生的振动、车辆轮胎对系统的作用力。
这些干扰因素,严重影响了WIM系统的测量精度。
因此在后续的研究中,如何在各种干扰因素的干扰下获得准确的真实轴重是动态称重系统的研究难点和重点。
本文主要通过对动态汽车衡测量的不确定性的分析与研究,将提高测量的准确性,以期使系统具有最好的性能, 满足对运输车辆的管理要求。
动态称重系统的发展将会对社会做出巨大的贡献,它将会有效的减少交通事故发生的数量,减少路面的损坏,大幅节约路面维护资金。
关键词:动态汽车衡;动态称重系统;不确定度分析;不确定度评定Research of Dynamic truck scale measurement uncertainty analysis and evaluationmethodsAbstractWith the rapid development of reform and opening up of the economy border trade, the rapid development of highway, the rapidly increased throughput of port cargo .To achieve fast accurate measurement has very important practical significance.At present Dynamic weighing system of our country has made great progress on the research, but there are also some problems need to be solved. These questions including how to improve the accuracy of measurement. Because cars in low speed will get high accuracy of measurement, but when cars at high speed, we cannot get the accuracy which we hope to meet. Vehicles process in the dynamic weighing measurement is plex, many factors can interfere with the system to obtain real axle load of the vehicle. Such as: the vehicle's traffic speed, the vibration of the vehicle movement itself, vehicle tire forces on the system. These interference factors seriously influence the measuring accuracy of WIM system. Therefore in the follow-up study, how to obtain accurate under various interference factors of interference real axle load is the research emphasis and difficulty of dynamic weighing system.This article mainly through to the dynamic truck scale to measure the uncertainty of the analysis and research, to improve the accuracy of measurement, in order to make the system has the best performance, satisfies the requirement of the management of the transport vehicle. Vehicle dynamic weighing technology development will be beneficial to reduce the number of traffic accidents, reducing pavement damage, save national highway maintenance funds and so on, it will have a direct and indirect economic benefits. To prevent tollbooth collector cheat, Governance overload flood and overload protection provided important means for the highway. Key words:Dynamic truck scale; Dynamic weighing system; The uncertainty analysis ; The uncertainty evaluation目录第一章动态汽车衡的发展现状 (5)1.1 研究背景 (5)1.2 车辆动态称重 (5)1.3 汽车衡发展趋势 (6)1.4 国内外动态汽车衡称重系统的发展与现状 (6)1.4.1 国外动态汽车衡称重系统的发展与现状 (6)1.4.2 国内动态汽车衡称重系统的发展与现状 (7)1.5 存在问题 (7)1.6 研究的目的与意义 (8)1.7 本文研究的内容 (8)第二章动态汽车衡称重系统的构成与工作原理 (9)2.1 结构组成 (9)2.2 汽车衡的工作原理 (10)2.3 动态汽车衡相关标准与规程 (11)2.4 动态汽车衡静态称量的检定 (12)2.4.1 动态汽车衡作为非自动衡器使用 (12)2.4.2 动态汽车衡作为控制衡器使用 (12)2.5 动态汽车衡动态称量的检定 (12)2.5.1动态检定标准器 (12)2.5.2参考车辆轴重和车重的确定 (12)第三章测量结果不确定度 (14)3.1 测量不确定度的发展历史 (14)3.2 测量不确定度的基本概念 (14)3.3 不确定度的评定方法 (15)3.3.1 A类不确定度的评定方法 (15)3.3.2 B类不确定度的评定方法 (16)3.4测量结果及其不确定度的表示 (18)第四章动态汽车衡测量结果不确定度的主要影响因素分析 (20)4.1 车辆运动状态 (20)4.2 车辆运动速度 (22)4.3 其他影响因素 (24)第五章动态汽车衡测量不确定度的评定分析 (25)5.1 静态称量的不确定度分析 (25)5.1.1 无细分分度值动态汽车衡静态测试不确定度分析 (25)5.1.2 有细分分度值动态汽车衡静态测试不确定度分析 (27)5.2 动态称量的不确定度分析 (29)5.2.1 总车重动态称量示值的不确定度分析 (29)5.2.1 双轴刚性车辆单轴动态测试结果的不确定度分析 (31)第六章动态汽车衡测量结果不确定度评定方法的实践验证 (36)6.1动态汽车衡作为非自动秤静态称量结果的不确定度分析 (37)6.1.1静态测试分辨力 (37)6.1.2 静态测试重复性 (38)6.2 动态汽车衡作为控制衡器静态测试示值误差的不确定度分析 (38)6.3 动态汽车衡动态试验示值及示值误差的不确定度分析 (40)6.4轴刚性车辆轴载荷修正平均值的不确定度分析 (42)第七章结论 (46)7.1 全文总结 (46)7.2 结论 (46).................................................... 错误!未定义书签。
动态公路车辆自动衡器示值测量不确定度的评估

动态公路车辆自动衡器示值测量不确定度的评估作者:沈新生来源:《中国科技博览》2016年第03期[摘要]本文主要以动态公路车辆自动衡器为被测对象,根据 JJF1069-2012《法定计量检定机构考核规范》对实验室校准和测量能力(CMC)评估的要求,依据JJG907—2006《动态公路车辆自动衡器》国家计量检定规程重新编写了动态公路车辆自动衡器示值测量不确定度评估报告。
[关键词]动态公路车辆自动衡器?不确定度评估中图分类号:TH715.1;U495 文献标识码:A 文章编号:1009-914X(2016)03-0104-021 概述1.1.1测量依据: JJG907—2006《动态公路车辆自动衡器》国家计量检定规程1.2计量标准:M1级砝码,测量范围1t~16t;参考车辆为四轴刚性车辆,型号:欧曼2610A(车辆总重31560kg,其中参考车辆上的标准砝码16t);控制衡器:SCS-60,最大秤量:60t,检定分度值e=20kg。
1.3 被测对象:动态汽车衡,型号:DAW100,轴载最大秤量:30t,检定分度值e=10kg,动态准确度等级:5级。
1.4 测量方法:动态检测:参考车辆在5km/h典型速度下对动态汽车衡进行检测,每组测试10次,其测量参考车辆整车的总重量示值与参考车辆整车总重量的约定真值之差即为车辆总重量的误差。
2 数学模型动态公路车辆自动衡器的示值误差由下式得到3 不确定度传播率4 标准不确定度分量的分析与计算4.1 动态公路车辆自动衡器示值引入的不确定度分量4.1.1计算示值分辨力引入的不确定度分量动态公路车辆自动衡器是数显重量,其数字分辨力为e,数字分辨力的不确定度为:4.1.2计算示值重复性引入的不确定度分量参考车辆在5km/h测量重复性引起的标准不确定度分量的评定参考车辆对动态汽车衡进行10次连续重复测量,得到测量列(车辆整车总重量示值)31450kg,31820kg,31500kg,31540kg,31610kg,31600kg,31580kg,31600kg,31550kg,31520kg。
便携式动态轴重仪校准测量能力(CMC)评定方法
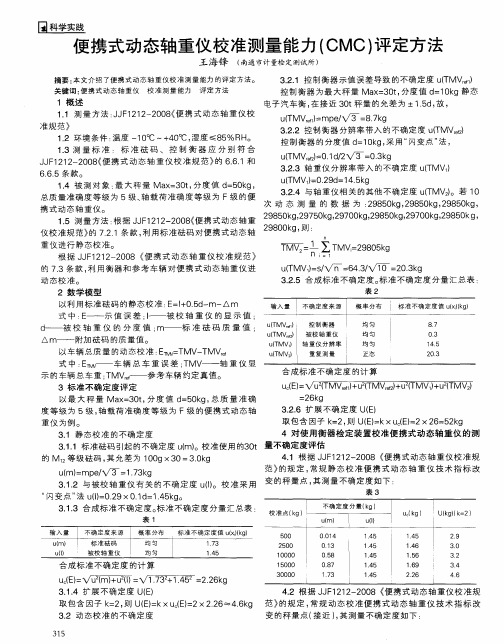
u ( T MV r e f ) = mp e / 、 / 3= 8 . 7 k g 3 . 2 . 2 控制 衡器 分辨 率带 入 的不确定 度 u ( T MV ) 控制 衡器 的 分度值 d = 1 O k g , 采用“ 闪变点 ” 法,
u ( T MV : 0 . 1 d / 2 、 / 3= 0 . 3 k g
J J F 1 2 1 2 — 2 0 0 8 { 便携 式 动 态轴 重仪 校 准规 范 . 2 . 3 轴 重仪 分辨 率带入 的不确定 度 u ( T MV )
u ( TMV ) =0 . 2 9 d =1 4 . 5 k g
【 8 7
0 . 3
u ( T MV ) 轴 重仪 分 辨率
u ( T MV 2 ) 重复 测 量
均 匀
正 态
1 4 5
2 O . 3
示 的 车辆 总车 重 ; T MV —— 参 考车辆 约定 真值 。 3 标 准不确 定 度评定
以最 大 秤 量 Ma x = 3 0 t , 分度 值 d = 5 O k g, 总质 量 准 确 度 等 级为 5级 , 轴 载荷 准确 度等 级 为 F级 的便 携式 动 态轴
的7 . 3条 款 , 利 用衡器 和参 考 车辆 对便携 式 动 态轴 重 仪进
动 态校准 。
T M V 2 = ÷ T M V i = 2 9 8 0 5 k g
u ( T MV ) = s / 、 / = 6 4 . 3 / 、 / r T = 2 0 . 3 k g
3 _ 2 _ 5 合 成标准 不确定 度 。 标 准不确 定度 分量 汇 总表
△m—— 附加 砝码 的质 量值 。 以车辆 总质 量 的动态校 准 : E = T MV— T MV 式中 : E 厂 车辆总车 重误差 ; T MV — — 轴 重 仪 显
动态汽车衡检定操作方法与测量结果不确定度评定研究
等 称量 点 检定 动 态 汽 车 衡 作 为 静 态 衡 器 使 用 时 是 否符 合 中 准 确 度 级 或普 通 准 确 度 级 的 要 求 。按 江
苏省质量 技术监督局 《 江苏省道路计 重装置检定 中执行 <动态汽车衡 >检定规程的实施意见》 第 二条的要 求 ,至少选择 8个称量点 。对于每个称 量点 进行 3次连・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・
. 。 . 。 . ・ ・ ・ ・ ・
・ ・
● ● ● ● ● ● ● ● ● ● ● . . ● . : ● ● ● : ● ● . ● . ● : ● ● ● : ● ● ● ● : ● ● ● : ● ● ● : ● : ● ● ● " : E J l i x a mi n a t i o n T e s t 一
7 偏 载检 定 对 于有 几个支 承点 且 n > 4的衡 器 , 施 加 载荷 等 于最 大秤 量 的 l l ( n — 1 ) , 凡 ≤4的衡 器 , 每个 支 承点 上 施 加 的载 荷等 于 最 大秤 量 的 1 / 3 。检 定 中注意 不 要 将 砝 码过 度集 中堆放 或叠 放 。
零 范 围。
5 . 2 . 2 负 向 自动 置零 首 先 在 承 载 器 上 加 一 个 附 加 砝 码 重 新 校 准 衡 器 。该 附 加 砝 码 应 大 于 自动 置 零 的负 向范 围 。连 续 卸 下砝 码 ,每 卸 一 次 砝 码 间隔 一 段 时 间 ,观 察 衡 器 能 否 自动 置 零 。可 以 卸 掉 载 荷 , 同时 仍 能 用
荷并 且 还能 回零 的 即为 负 向置零 范 围 。 5 . 2 自动 置零
动态电子汽车衡检定结果的不确定度评定

动态电子汽车衡检定结果的不确定度评定摘要:本文研究了影响动态电子汽车衡检定质量测定不确定度测定的因素,并在此基础上建立动态汽车衡检定装置,并使动态汽车衡检定严格按照相关规范和标准进行操作,并对检定过程中常见的测定不确定度进行系统的分析和评定,从而有效提高动态电子汽车衡检定结果的准确性。
关键词:动态电子汽车衡;检定装置;不确定度;评定称重传感器是使用汽车衡进行称重测量的关键部件。
不确定度评定是汽车衡装置检测的常见任务,其结果可能决定产品的可接受性或测试结果。
测量不确定度的估计已经成为获得实验室认可的关键要求。
为了确保动态汽车衡称重的准确性,技术监督部门需要根据实际情况配备动态电子汽车衡检定装置,并对其不确定度进行有效的评定,以提高装置的运行效果。
目前动态汽车衡主要有两种,分别是轴重式和全车称重式,本文将会针对后者对其进行分析。
1.汽车衡的简介汽车衡是一套大型衡器,通常永久安装在混凝土基础上,用于衡量整个道路车辆及其内容。
通过对车辆进行空载和加载时的称重,可以计算车辆所承载的载荷。
汽车衡可以采用表面安装,坡度较小,称重设备位于下方,也可以将称重设备和平台放在坑内,使称重表面与道路平齐。
它们通常由钢筋混凝土建造而成,本质上是非常坚固的。
在较早的产品中,汽车衡是机械杠杆结构,杠杆组被安装在一个长方形的坑内,最终连接到带有平衡机构的计量杠杆。
这种类型的最复杂的部分是在地磅下面的杠杆的布置,因为秤的响应必须独立于负载的分布。
现代设备使用连接到电子设备的多个称重传感器来汇总传感器输入。
在任何一种类型的半永久性秤中,重量读数通常记录在附近的小屋或办公室。
现在许多地秤都连接到一台可以打印票据和提供报告功能的卡车秤软件。
动态汽车衡可以用于两个主要目的:检查称量车轴重量和车辆总重量。
这有助于防止轴超载和总重超载。
目前称重准确度和效率相结合的比较好的动态汽车衡,是整车连续称重式电子汽车衡,其最大称量为60t,检定分度值e=10 kg,用内分辨率法d=1 kg。
动态汽车衡检定操作方法与测量结果不确定度评定研究
u 1 = E / √3 = 0 . 2 6 k g ;
2 控制衡器误 差△ 引起 的不确定度 u 控制衡器误差 △。 ,在检定 中一般选用 临 近现场的 S CS 一 6 0型电子汽车衡 作为控制衡器 使用,其最大秤量 6 0 t ,分度值 2 0 k g ,经过对 其 的事先检 定调试 ,控 制衡器最大 误差一般 为4 k g ,平均误差为 0 , 可 以认 为 / k 1 = 4 k g : U 2 = Ad √ 2 - 3 l k g ; 3 读数误差/ k 2 引起 的不确定度 U 3
U 3 / k2 / 0 . 5 8 k g ;
7 . 偏载检定
对于有 n个支承点且 n > 4的衡器,施加 载荷等于最大秤量的 1 /( n 一 1 ) ,n不大于 4 的 衡 器,每个支承 点上施加 的载荷 等于最大秤 量的 1 / 3 。检定 中注意不要将砝码过度 集中堆 放 或叠 放 。
砝码的情况下重新校准衡器。 5 . 3检定置零准确度 确 定置零准确度 ,零点 示值 误差不大 于
0 . 2 5 d .
3 . 被检衡器的安置
对于便携 式动态汽车衡 ,参照 参考车辆 的轮距及 其他因素,平行放置 于水平路面 。
6 . 静态秤量检定
分别 选定最小秤 量、最大秤 量及最大允 许误差改变的秤量点和 5 t 、1 0 t 、1 3 t( 1 5 t ) 、 2 0 t 、 2 5 t 等称量点检定动态汽车衡作为静态衡 器 使用时是否符合 中准确度 级或普通准确度 级 的要求。按江苏 省质量技术监 督局 《 江苏 省道 路计重装置检定 中执 行< 动态汽车衡> 检 定 规程 的实施 意见 》第二条 的要 求,至少选 择 8个称量点 。对于地车辆 的选 取与联 系
校准示值误差测量结果的不确定度评定——以机动车发动机转速测量仪为例
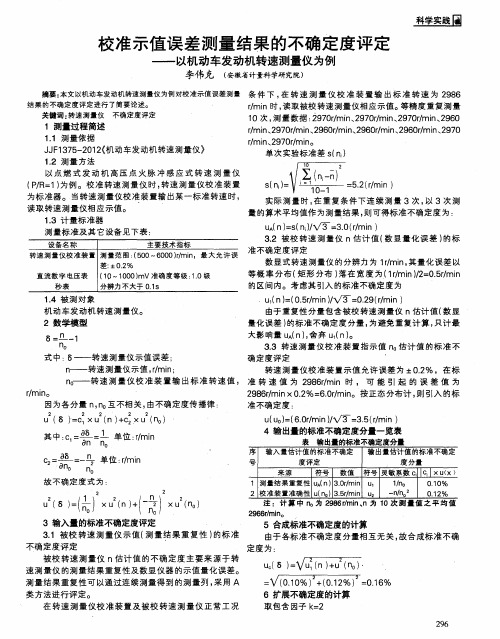
u ( U o ) = ( 6 . 0 r / mi n) / 、 / 3= 3 . 5 ( r / mi n) 4 输 出量 的标准 不确 定度 分量 一览 表
表 输出量的标 准不确定度分量 序 输 入量 估计值 的标准不确定 输 出量估计值 的标 准不确定
号 度 评 定 度 分量 来 源 符 号 数 值 符 号 灵敏 系数 c C i l ×U ( X) 1 测 量 结 果 重 复 性 u A ( n) 3 . 0 r / mi n U 1 1 / n o 0 . 1 O %
转 速 测 量 仪 校 准 装 置 测量范 围 : ( 5 0 0—6 0 0 0) r / mI n ,最 大 允 许 误 直 流 数 字 电压 表 ( 1 0 1 0 0 0) mV 准确 度 等 级 : 1 . 0级 秒 表 分辨力不大于 O . 1 S
的 区间 内。考 虑其 引入 的标 准不确 定 度 为
1 O次 , 测量 数 据 : 2 9 7 0 r / mi n 、 2 9 7 0 r / mi n 、 2 9 7 0 r / mi n 、 2 9 6 0
r / mi n 、 2 9 7 0 r / mi n 、 2 9 6 0 r / mi n 、 2 9 6 0 r / mi n 、 2 9 6 0 r / mi n 、 2 9 7 0 r / mi n 、 2 9 7 0 r / mi n 。
=
5 . 2 ( r / mi n)
读 取 转速 测量 仪相 应 示值 。 1 . 3 计 量标 准 器 测 量标 准 及其 它设备 见下表
设备 名 称
差: 4 - 0 . 2 %
实 际 测量 时 , 在 重复 条件 下连 续 测 量 3次 , 以 3次测 量 的算术 平均 值作 为 测量 结果 , 则可 得标 准 不确定 度 为 :
汽车检测中测量结果不确定度评定的研究

汽车检测中测量结果不确定度评定的研究【摘要】汽车检测中测量结果的准确性和可靠性在很大程度上取决于测量结果不确定度的大小,因此,合理评定测量结果的不确定度是检测中必须重视的问题。
本文就汽车检测中测量结果不确定度评定进行了研究,详细介绍了测量不确定度评定的必要性以及测量不确定度的影响量,并提出一些有关测量不确定度的评定方法。
【关键词】不确定度;评定;汽车检测一般的,汽车在使用过程中,随着使用时间的延长,其零件逐渐磨损、腐蚀、变形、老化,以及润滑油变质等,致使配合副间隙变大,引起运动松旷、振动、发响和漏气、漏水、漏油等,造成汽车技术性能下降。
而所谓的汽车检测,是指为确定汽车技术状况或工作能力的检查,检测后的测量结果对汽车的维修有着一定的作用。
汽车检测中测量结果的准确性和可靠性在很大程度上取决于测量结果不确定度的大小,因此,合理评定测量结果的不确定度是检测中必须重视的问题。
本文就汽车检测中测量结果不确定度评定进行了研究,以期能为类似的评定工作提供参考借鉴。
1.测量不确定度评定的必要性在汽车检测中,检测不确定度应用的场合很多。
可以说,对于任何有数值要求的测量,原则上在给出测量结果的同时还应给出该测量结果的不确定度。
否则这一测量结果便是“不完整的”。
特别是当测量结果在标准限值附近时,测量结果的不确定度的大小将直接影响合格或不合格的判定。
因此,凡是需要对被测量进行合格性判断的场合,必须给出检测结果的不确定度。
一般说来,在检测结果的完整表述中通常应给出测量结果的扩展不确定度。
2.测量不确定度的影响量测量结果中的误差可能来源于两个方面:在重复测量中由测量结果的变化所得到的随机分量,以及由于对系统影响的修正不完善所引入的系统分量。
在任何情况下,测量不确定度的评定都应包括这两方面的因素所引入的不确定度分量。
随机效应对测量结果的影响是不断的变化的,即使在重复性条件下进行测量,其观测列也将分布在一定的区间内。
因此随机效应对测量结果的影响不能通过修正值或修正因子而消除。
电子汽车衡示值误差测量结果的不确定度分析

电子汽车衡示值误差测量结果的不确定度分析1概述1.1测量依据依据:JJG539-1997《数字指示秤检定归程》环境条件:温度-10℃~40℃.湿度≤70%RH.测量标准:M1级砝码1.2被测对象电子汽车衡级。
检定分度值e为10kg,最大允许误差值:0~500e为±0.5e,500e~2000e为±1.0e,2000e以上为±1.5e .1.3测量过程用砝码直接加载.卸载的方式,分段测量示值与标准砝码之差即为示值误差。
2数学模型E=I-L+0.5e-ΔL式中:E为电子汽车衡示值误差,L为标准砝码值,I为在电子汽车衡上的标准砝码是L时的示值,e为分度值,ΔL 为附加砝码值。
3检定电子汽车衡的各不确定度的计算3.1电子汽车衡示值I的标准不确定度u(I)(1)电子汽车衡测量重复性引起的标准不确定度分量u(I1)用标准砝码直接加载.卸载检定方法,在人员操作.读数等方面不可避免会产生随机误差,通过对电子汽车衡的某点进行重复性测量,来计算由此而带来的不确定度,即u(I1)。
选1# 电子汽车衡,型号SCS-80 ,测量范围为0~80t,检定分度值为20kg.在40t测量点对此汽车衡进行5次重复测量,测得值为X i ,测量数据如下表数据表1X i/kg (X i-X)/kg (X i-X)2/kg21 40.000×103-1.000 1.0002 40.006×103 1.000 1.0003 40.004×1030.000 0.0004 40.001×1030.000 0.0005 40.002×1030.000 0.000∑0.000 2.000X10.001×103数据表2L/kg I/kg ΔL/kg E/kg X i/kg 1000.00 1000.00 8.000 0.000 10.000×103 1000.00 1000.00 6.000 2.000 10.002×103 1000.00 1000.00 7.000 1.000 10.001×103 1000.00 1000.00 7.000 1.000 10.001×103 1000.00 1000.00 7.000 1.000 10.001×103由贝赛尔公式得标准偏差S(X i)为;S (X i )=1-n )(12i∑=-ni X X=0.71kg平均值(X )的标准不确定度即u (I 1)为:u (I 1)=nXi S )(=571.0kg=0.32kg自由度:v (I 1)=n-1=4(2)电子汽车衡分辨力引起的标准不确定度分量u (I 2) 对于数字显示式测量仪器,由分辨力(δx )引起的标准不确定度为u (δx )=0.29δx因此:u (I 2)=0.29e=0.29×10kg=2.90kg 估计 Δu (I 2)/u (I 2)=0.10, 自由度:v (I 2)=21×(0.10)-2=50(3)电子汽车衡偏载误差引起的标准不确定度分量u (I 3)电子汽车衡进行偏载检定时,用最大量程1/3的砝码,放置在1/4秤台面积中,最大值与最小值之差一般不会超过相应秤量的允许误差值,即±10kg,半宽为10kg,一般取其误差为偏载检定时的1/3,并服从均匀分布,包含因子k=3可得 u(I 3)=3310kg =1.92kg估计Δu (I 3)/u (I 3)=0.10, 自由度 v (I 3)=21×(0.10)-2=50(4)电子汽车衡示值I 的标准不确定度u (I ) 由于示值I 的分项彼此独立不相关,因此, u (I )=)(u )(u )(322212I I I u ++=22292.190.232.0++kg=3.49kg自由度v (I )=∑ii vI u 44u )(=624.2标准砝码L 的标准不确定度u(L)查表得到1t 砝码的最大允许误差为±0.05kg,服从均匀分布,包含因子k=3, 1t砝码的标准不确定度u / (L)=305.0kg=0.03kg 因标准砝码共30t,故得u (L )=30×u / (L)=30×0.03kg=0.90kg 估计Δu (L )/ u (L )=0.10, 自由度 v (I )=1/2×(0.10)-2 =50 4.3环境变化引起的标准不确定度u4电子汽车衡在检定使用中要受到温度.湿度和室外条件的影响,室外检定现场无风雪及4级以上风力,在检定过程中可以把温度.湿度.室外条件控制在要求范围内,因此可以不考虑以上条件引入的不确定度u4。
汽车制动操纵力计示值误差测量结果不确定度评定
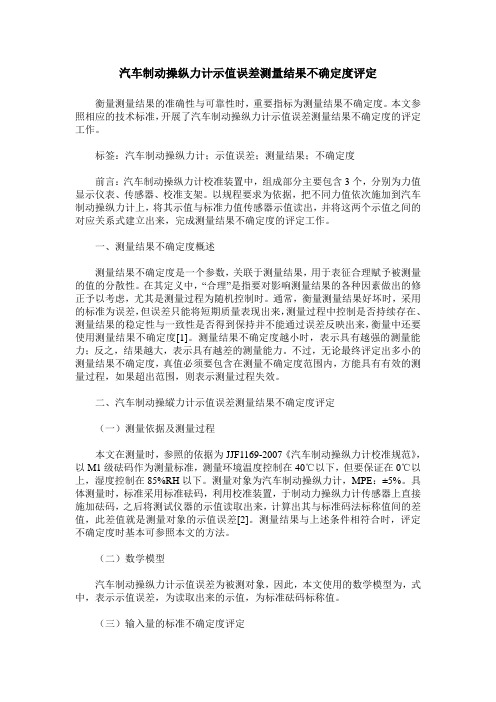
汽车制动操纵力计示值误差测量结果不确定度评定衡量测量结果的准确性与可靠性时,重要指标为测量结果不确定度。
本文参照相应的技术标准,开展了汽车制动操纵力计示值误差测量结果不确定度的评定工作。
标签:汽车制动操纵力计;示值误差;测量结果;不确定度前言:汽车制动操纵力计校准装置中,组成部分主要包含3个,分别为力值显示仪表、传感器、校准支架。
以规程要求为依据,把不同力值依次施加到汽车制动操纵力计上,将其示值与标准力值传感器示值读出,并将这两个示值之间的对应关系式建立出来,完成测量结果不确定度的评定工作。
一、测量结果不确定度概述测量结果不确定度是一个参数,关联于测量结果,用于表征合理赋予被测量的值的分散性。
在其定义中,“合理”是指要对影响测量结果的各种因素做出的修正予以考虑,尤其是测量过程为随机控制时。
通常,衡量测量结果好坏时,采用的标准为误差,但误差只能将短期质量表现出来,测量过程中控制是否持续存在、测量结果的稳定性与一致性是否得到保持并不能通过误差反映出来,衡量中还要使用测量结果不确定度[1]。
测量结果不确定度越小时,表示具有越强的测量能力;反之,结果越大,表示具有越差的测量能力。
不过,无论最终评定出多小的测量结果不确定度,真值必须要包含在测量不确定度范围内,方能具有有效的测量过程,如果超出范围,则表示测量过程失效。
二、汽车制动操縱力计示值误差测量结果不确定度评定(一)测量依据及测量过程本文在测量时,参照的依据为JJF1169-2007《汽车制动操纵力计校准规范》,以M1级砝码作为测量标准,测量环境温度控制在40℃以下,但要保证在0℃以上,湿度控制在85%RH以下。
测量对象为汽车制动操纵力计,MPE:±5%。
具体测量时,标准采用标准砝码,利用校准装置,于制动力操纵力计传感器上直接施加砝码,之后将测试仪器的示值读取出来,计算出其与标准码法标称值间的差值,此差值就是测量对象的示值误差[2]。
测量结果与上述条件相符合时,评定不确定度时基本可参照本文的方法。
动态电子汽车衡示值误差测量结果的不确定度评定
动态电子汽车衡示值误差测量结果的不确定度评定
李昊
【期刊名称】《仪器仪表标准化与计量》
【年(卷),期】2017(000)002
【摘要】电子汽车衡是一种新型的电子衡器,具有称量迅速、准确度高、显示直观、功能齐全等特点,适用于工业、商业、建筑、仓储、货站、集贸市场等行业的计量,
是一种比较理想的计量器具.动态汽车衡又称为动态公路车辆自动衡器,它通过整车
称量方式或轴重(非整车)称量方式,可称量行驶中的动态车辆总重量或轴重的自动衡器,分为整车称量和轴称量两种.整车称量的动态汽车衡外形与静态电子汽车衡相同,因此常被做成动静两用电子汽车衡,主要是用于非单纯地按照称量结果进行贸易结算,而以称量结果进行的技术判断和统计.本文针对动态电子汽车衡示值误差测量结
果进行不确定度评定.
【总页数】4页(P29-31,48)
【作者】李昊
【作者单位】黑龙江省计量检定测试院,哈尔滨市150036
【正文语种】中文
【相关文献】
1.电子汽车衡示值误差测量结果不确定度评定 [J], 杨大为
2.电子汽车衡示值误差测量值的不确定度评定 [J], 张景亮
3.电子汽车衡示值误差测量结果的不确定度评定 [J], 黄永华
4.电子汽车衡示值误差测量结果的不确定度评定 [J], 黄永华;
5.电子汽车衡示值误差测量结果的不确定度评定 [J], 卢英权
因版权原因,仅展示原文概要,查看原文内容请购买。
动态汽车衡示值误差测量不确定度评定

l 测 量 方 法
首先用 M 级 砝 码 对 动 态 汽 车 衡 进 行 静 态 检 定 。对 动态 汽车衡 进行 动 态试 验 前首 先 用 M. 砝 级 码对分 离控 制 衡 器 Ma 5 te= 0 g的静 态 电子 x: 0 、 2 k 汽车衡 进行 检定 , 在静态 电 子汽 车衡 符 合 级准 确
21 0 0年第 1 期
文章 编号 : 0 3 8 (0 0 0 — 0 2— 3 1 5— 37 2 1 ) 1 0 3 3 0
动态 汽 车衡 示 值 误 差测 量 不 确 定 度 评 定
王博宇 吴俊迪 陈 希彦
( 江西省 计量测 试研究 院 , 昌 300 ) 南 30 2
摘 要 : 文 对 动 态 汽 车 衡 测 量结 果 的不 确 定 度 进 行 评 定 , 立 了不 确 定 度 评 定 的 数 学 模 型 , 析 了测 量 过 程 中的 不 确 本 建 分
影 响动 态 汽 车衡 的静 态 试 验 测 量 不 确 定 度来
源有 :
动态 汽 车衡 的分 度值 e= 0 g采 用 内分 辨 率 2 k,
法 ( 0 2 ) 定衡 器 化 整前 的 示值 误 差 , 字 示 d= . e 确 数
1标 准器 ( ) 砝码 ) 的质 量值 不准 ; 2 动态 汽车衡 数字示值 的分辨率 ; ) 3 相 同条 件下 动态汽 车衡静 态测 量 的重 复性 ; )
型式 评价 , 首先 用 M 级砝 码 对 动 态 汽车 衡 进 行 静
态检 定 。
3t 0 的静态 载荷 由 3 0个 1砝 码组 合 而成 , t 已知
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动态汽车衡示值误差测量结果不确定度评定
摘要:本文以动态汽车衡为例,阐述了动态汽车衡示值误差测量结果不确定度评定过程中的方法和步骤。
关键词:动态汽车衡;示值误差;不确定度评定
1 概述
动态汽车衡是指安装在道路上,带有承载器并包括引道在内的,通过对行驶车辆的称量确定车辆的总质量和载荷的一种自动衡器。
包括整车称量的动态汽车衡和轴称量的动态汽车衡。
通常由载荷承载器、称重传感器和动态称重显示控制器等组成。
必要时动态汽车衡还应有打印装置、车辆引导装置、车辆识别装置、轴组识别装置和运行速度测量等装置。
1.1 环境条件:(-10~40)℃,相对湿度不大于85%,检定期间最大温差不大于5℃
1.2 技术依据:依据JJG 907-2006《动态公路车辆自动衡器》检定规程。
1.3 测量标准:砝码的质量范围为1kg~60t,最大允许误差为±(50mg~3.0kg)。
1.4 被校对象:单轴载荷或轴组载荷的准确度等
级为B级,整车总重量的准确度等级为0.5级,最大秤量为60t,d=20kg的动态电子汽车衡。
1.5 检定方法:动态测量过程是已知质量的参考车辆以缓慢均匀的速度通过动态汽车衡,动态汽车衡的示值显示部分显示该参考车辆的单轴质量值和整车总重质量值,重复此过程,共测量10次,其算术平均值就是该参考车辆质量的示值。
2 数学模型及灵敏系数
E=P-M
式中:
E--动态汽车衡示值误差;
P--动态汽车衡化整前示值;
M--标准砝码质量值。
灵敏度系数:
3 标准不确定度分析
3.1 测量重复性引入的标准不确定度分量
在检定条件下,使用检定方法连续测量10次,结果为:30012、30004、29991、30011、30005、29995、29999、30019、30011、29992(单位:公斤)
10.9kg
由于实际情况是在重复条件下连续测量3次,并以3次测量的平均值作为测量结果,则测量重复性引
入的不确定度分量u(SP)为:
=6.3kg
3.2 标准器引入的不确定度分量
标准器引入的不确定度根据砝码证书给出,砝码的允许误差为50g,按照均匀分布计算,则:
3.3 由显示分度值引入的不确定度分量
因控制衡器的分度值是20kg,无论在10T 还是30T 称量处均可采用“闪变点”法,其数字示值的分辨率为0.1e,则(M)= 0.29δ=0.58kg。
由动态汽车衡的(控制衡器)的显示分度值引入的不确定度分量(M)的的评定因控制衡器的分度值是20kg,无论在10T 还是30T 称量处均可采用“闪变点”法,其数字示值的分辨率为0.1e,则=0.29δ=0.58kg。
3.3 标准不确定度分量汇总
输入量的标准不确定度汇总表见表C1
4 合成标准不确定度uc(E)
5 扩展不确定度
取包含因子K=2,则扩展不确定度:U=k×uc(E)=2×6.6=13.2kg
参考文献
[1] 国家质检总局. JJG 907-2006《动态公路车辆自动衡器》检定规程[S].2006
[2] 王博宇. 动态汽车衡示值误差测量不确定度评定[J]. 现代测量与实验室管理.2010
[3] 邢东华. 动态汽车衡示值误差测量结果的不确定度评定[J]. 质量技术监督研究.2015
作者简介:
王卫星,男,1960年4月出生,工程师,沈阳计量测试院,主要从事衡器的检定、校准工作。