一类三自由度碰撞振动系统运动的稳定性及数值仿真
一类三自由度碰撞振动系统的分岔与混沌演化

等耐
。
0 ) 点时, 系统 可 能发生 鞍 阶分 岔 。 ( 7 ) 征 值横 截 (1,
在适 当 的参数 下 , 图1 所 示 的碰撞 能 够表 现为 周
期 碰 撞过 程 。周期 q = 1 / n运动 表示 振子 碰撞 后 时 间 t = 0 , 下 一次 碰撞 的 时 间恰 好 为 2 n 丌 / ( 1 ) ( n=1 , 2 …) ,
=
∑ ( e -  ̄ j t (  ̄ c o s ( 【 , t + b i s i n ∞ ) +
s i n( t o t + r )+ c o s( ( o +7 I ) ) ( 2 ) ( 3 )
X i ( ) =∑ [ e - ( a j e o s d J +b j s i n ∞ ) + A s i n
J= 1
( t o t+ r 0+△ 丁 )+B C O S( t o t+丁 o+△ ) ]
( 8 )
3
3=e 一 ( a 3 c o s D d 3 t +b 3 s i n 6 d 3 t )+ A 3 s i n( t o t + 『 )+B 3 C O 8( m t +丁 ) 丁 o+△ 丁 )+B 3 C O S( m t +丁 o+△ 7 - )
=
即连 续两 次碰 撞 的 时 间间 隔 皆为 2 n  ̄ r / w。系 统 周 期 运动 的初 始终 止条 件为 :
1
1 . 0 , = 0 . 0 1 , R= 0 . 8 , = 0 . 1 。特征值 如图 2所示 。
( 0 ) = 1 ( 2 n  ̄ r / w) = 1 o ; 1 ( 0 )一 3 ( 0 ) : ;
式中 : “・ ” 表 不 对无量 纲 时 I 司t 求 导 数 。 尢 量 量 如
一种三自由度串级控制的仿真研究
摘要 : 关于优化控制系统性能 问题 , 由于控制系统中存在非线性滞后各种干扰因素 , 严重影响响应和稳定性 。为实现在线 独
立调节副 回路设定响应与扰动抑制响应 , 增强主回路的抗 干扰 能力 , 改善系统性能 . 提出一种新的三 自由度串级控制方 法。
在副 回路 中采用两 自由度 内模控制 , 回路采用单位反馈控制结构 , 主 并根据闭环最优灵敏度 函数方法确定主控制器 , 而保 从
Sm l adef t eaa ta m to dp dt dvs tecnrlr, ahcnr l scnb d s dadot i pe n f c v n li l e di aot ei o t l s ec ot l r a eaj t n pi ei yc h s e o eh oe oe ue ・
c n rls se wh n o t zn e s se p roma c .I r e oi r v h n i d su b n ec p b l y o e ma o t y t m e p i ig t y tm e fr n e n od r mp o et e a t itr a c a a i t f h - o mi h t ~ i t
证系统的整体性能。对各个控制器的解析建模 设计 , 对每个控制器都 可以进行单参数调节 和优化 , 并对主 回路 和副 回路存
在 的乘性不确定性进行仿 真。仿真结果表明 , 新的控制方法具有较好 的设定值跟踪性 能和抗干扰能力 , 提高 了系统 的鲁棒
稳定性。
关键词 : 时滞系统 ; 串级控制 ; 改进的 内模控制 ; 自由度 三 中图分类号 :P 7 T23 文献标识码 : A
jr opadsprt test itepneadtel dds rac sos , e acd ot lc e fhe o o n eaa e on r os n a iubn e epne anwcsaecnr hme re l eh p s h o t r os ot
三自由度摇摆台方案设计及仿真分析
第19卷 第12期 中 国 水 运 Vol.19 No.12 2019年 12月 China Water Transport December 2019收稿日期:2019-07-23作者简介:时阳阳(1993-),男,上海理工大学硕士生。
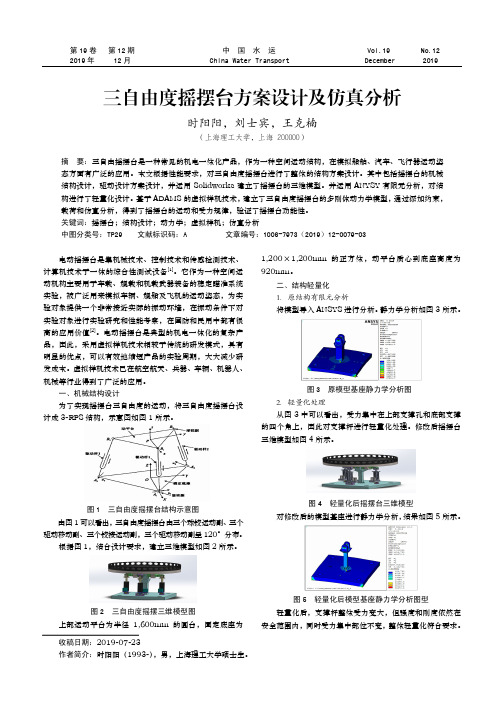
三自由度摇摆台方案设计及仿真分析时阳阳,刘士宾,王克楠(上海理工大学,上海 200000)摘 要:三自由摇摆台是一种常见的机电一体化产品,作为一种空间运动结构,在模拟船舶、汽车、飞行器运动姿态方面有广泛的应用。
本文根据性能要求,对三自由度摇摆台进行了整体的结构方案设计。
其中包括摇摆台的机械结构设计,驱动设计方案设计,并运用Solidworks 建立了摇摆台的三维模型。
并运用ANYSY 有限元分析,对结构进行了轻量化设计。
基于ADAMS 的虚拟样机技术,建立了三自由度摇摆台的多刚体动力学模型,通过添加约束,载荷和仿真分析,得到了摇摆台的运动和受力规律,验证了摇摆台功能性。
关键词:摇摆台;结构设计;动力学;虚拟样机;仿真分析中图分类号:TP29 文献标识码:A 文章编号:1006-7973(2019)12-0079-03电动摇摆台是集机械技术、控制技术和传感检测技术、计算机技术于一体的综合性测试设备[1]。
它作为一种空间运动机构主要用于车载、舰载和机载武器装备的稳定瞄准系统实验,被广泛用来模拟车辆、舰船及飞机的运动姿态,为实验对象提供一个非常接近实际的振动环境,在振动条件下对实验对象进行实验研究和性能考察,在国防和民用中都有很高的应用价值[2]。
电动摇摆台是典型的机电一体化的复杂产品,因此,采用虚拟样机技术相较于传统的研发模式,具有明显的优点,可以有效地缩短产品的实验周期,大大减少研发成本。
虚拟样机技术已在航空航天、兵器、车辆、机器人、机械等行业得到了广泛的应用。
一、机械结构设计为了实现摇摆台三自由度的运动,将三自由度摇摆台设计成3-RPS 结构,示意图如图1所示。
单自由度碰撞振动系统的稳定性分析

103
图5 Fig. 5
质块的相图
Phase plane portraits of the mass
振动系统的倍化分叉过程与连续非线性系统的标准 分叉过程有本质差异. 系统最终以周期 2 2 4 或 2 4 2 运动的倍周期序列通向混沌.
束 A 处. 这是由于激振力的频率很小, 即力周期很 大 , 当激振力由负变为正时 , 质块 M 才真正离开约 束 C 处, 向约束 A 处运动. 在此运动期间 , 激振力始 终是正的, 所以质块 M 的运动速度越来越大, 使得 质块 M 以很大的冲击速度与约束 A 发生碰撞. 碰撞 由碰撞恢复系数确定 , 碰撞后瞬时, 质块 M 的速度 变为反方向 , 但此时, 激振力仍然是正的, 质块 M 在 正激振力的作用下 , 速度由负变为正 , 使得质块 M 还没有回到约束 C 处 , 又被拉回约束 A 处, 与约束 A 发生碰撞, 如此往复, 质块 M 与约束 A 碰撞很多次, 直到激振力由正变为负, 质块 M 才能被拉到约束 C 处 , 与约束 C 发生碰撞. 随着激振频率 的增加, 力 周期减小, 质块 M 在一个力周期内与约束 A 和约束 C 的 磕碰 次数呈规律性的减少, 见图 8 a ~ d. 直 至 = 1. 2 时 , 形成稳定的对称型周期 1 3 3 运动, 即质块 M 与约束 A 连续碰撞三次以后, 才能到达约 束 C 处, 与约束 C 连续碰撞三次, 然后又回到约束 A 处 . 如此往复 , 形成稳定的周期运动.
图2 全局分叉图
Fig. 2
2
Global bifurcation diagram
a . 随激振频率 的进一步减小 , 当 递减穿越 = 2. 866 4 时, 发生 擦边 碰撞, 出现带有擦边的周期 = 2 2 2 运动 , 见图 5 b . 这种带有 擦边 的周期运动 会使映射在某些区域产生奇异性 , 这种奇异性会对 系统的分叉过程, 混沌的形成过程以及混沌运动的 特征都有本质的影响 . 擦边碰撞现象是系统由周期 运动进入混沌运动的主要原因 . 由于这种 擦边 碰 撞的奇异性 , 随着激振频率 继续减小, 系统不存在 由周期 2 2 2 向周期 4 4 4 演化的倍化分叉序列, 而是由 擦边 直接进入混沌, 见图 5 c .
用Mathe matica 求解线性3自由度系统微振动问题

用Mathe matica 求解线性3自由度系统微振动问题徐丹;萨茹拉【摘要】借助数学软件M athem atica ,用矩阵方法对线性3自由度系统微振动问题进行了计算和讨论,并模拟了此力学系统的运动。
通过与在普通物理实验室中的实验结果进行对比,在忽略空气阻力和弹簧质量的情况下,其仿真结果更能展现线性3自由度系统的微振动情况。
其动画很好地演示了线性3自由度系统的振动情况,使初学者对此模型有非常直观的认识,有助于加深对3自由度系统的认识。
【期刊名称】《物理通报》【年(卷),期】2015(000)003【总页数】3页(P35-37)【关键词】线性3自由度系统;Mathem atica;模拟【作者】徐丹;萨茹拉【作者单位】内蒙古师范大学物理与电子信息学院内蒙古呼和浩特 010021;内蒙古师范大学物理与电子信息学院内蒙古呼和浩特 010021【正文语种】中文1 引言多自由度力学系统的微振动问题是理论力学中的基本问题[1],它的方程均为线性微分方程.理论上用解析法可以得到方程的解,对于两个或3个自由度的微振动系统,求解过程还不算麻烦,但对有自由度较多的系统,求解就比较费力费时了.许多机械系统,根据其工作状况,可以将其简化成一个单自由度或两自由度系统的理论模型,以满足对其动态特性进行分析的要求.而事实上,所有机械系统都是由具有分布参数的元件所组成,严格地说,都是一个无限多自由度的系统(或连续系统,分布参数系统).根据结构特点和分析要求,把有些元件或其部分简化成质点,而把有些元件或其部分简化成弹簧,用有限个质点、弹簧和阻尼去形成一个简化的模型.多自由度系统是对连续系统在空间上的离散化和逼近,由于计算机技术的广泛应用,有限元分析和实验模态分析技术的发展,多自由度系统的理论和分析方法显得十分重要.Mathematica不仅有强大的数值运算功能,还有强大的符号运算功能.也就是说,经过简单的编程就能用计算机求出微分方程的解析解.包括微振动系统的本征频率、本征矢、简正模的运动学方程和耦合振动的运动学方程.用计算机进行复杂的运算,可以将节约下来的时间更多地用于研究物理现象本身而不是沉浸在复杂的数学运算中[2].本文主要介绍用Mathematica对3自由度的微振动问题求解,主要采用矩阵方法求本征值和本征矢,再求解耦合的微分方程的解.利用Mathematica对所得结果进行动画演示.2 3自由度微振动系统的模型[3]如图1所示,两个弹簧连接3个质点组成的一维振动系统,其中弹簧的劲度系数为κ,中间的质点的质量为M,两端点的质量为m.图1 3自由度系统的微振动以图1所示的3个质点相对自身平衡位置的位移x1,x2,x3作为3自由度振动系统的广义坐标.由拉格朗日方程,可得系统的运动微分方程为代入式(1)后,得矩阵形式的方程上面的方程组要求将简正频率分别代回式(5),可得到3个与之对应的本征矢量.对于ω1,本征矢量为对于ω3,本征矢量由式(9)可得简正模式的3个质点的振幅,简正模式的振动方程为由式(12)、(13)、(14)描绘出3个简正模式的运动情况.系统的运动时由3个简正模式运动的叠加,方程组(1)的通解为式(15)中的积分常数A11,A31,A31 和θ1,θ2,θ3 由初始条件确定.3 Mathematica的矩阵方法[4]求解本征值和本征矢将(2)式左乘S-1可得用Mathematica的指令Eigensystem求出矩阵S-1Κ的3个本征值和相对应的3个本征矢以后,就可将它分解成为3个独立的简正坐标的常微分方程,对方程分别求解就可得到3个简正模.编程的具体思路如图2所示.图2 编程思路4 通过Mathematica进行动画模拟首先调用Mathematica的Graphics指令绘制3自由度微振动的模型图,运行结果如图3所示.图3 用Mathematica绘制的3自由度微振动模型图然后调用Mathematica的Animate指令使其产生动画效果,经过调试后就能实现3自由度微振动系统的动画效果.5 结论本文介绍了3自由度系统微振动的基本概念,并对其基本模型用Mathematic进行仿真.通过运用Mathematic中的函数进行了编程,最终达到了动画模拟的目的.实验运行结果比在普通物理实验室中实验结果更加真实[5],因为在Mathematica下无需考虑空气阻力和弹簧的质量对系统的影响.参考文献【相关文献】1 卢圣治,胡静,管靖.理论力学.北京:电子工业出版社,1991.34~532 董键.Mathematica与大学物理计算.北京:清华大学出版社,2013.120~1423 甘祥根,陈丽红.物理模型及其应用.物理通报.2005,24(1):274 彭芳麟,等.理论力学计算机模拟.北京:清华大学出版社,2002.113~1155 GerdBaum ann.Mathematica in Theoretical Physics.Berlin Heidelberg:Springer-Verlag NewYork,1993。
一种三自由度并联机构刚度分析及仿真
( 2 )
() 3
霹 ,
’
, 3
( ) 3 式 与式 ( ) 2 () 1 分别 作互 易积 后写成 矩 阵形 式 :
.。 ,
=
,
0
() 4
式中.
[ 口 g )× 3 ] ( 一 .
.
J1 c=
s [ n 一 3. ×,] ; (3 q ) 5, s .
△B B , 2 3为 等 腰 直 角 三 角 形 , A AA , 3 △A A 23
: ,
人 的并 联模 块 2T R S R为 研究 对 象 , 立 了其 刚 -P & P 建 度模 型 , 得到 刚度 矩 阵 , 进 行 刚 度 的仿 真 , 析 评 并 分
价并 联 机构 在 一 定 工 作 空 间 内 的 刚度 性 能 , 参 数 为
A bsr c Th t f s fa3- t a t: e si ne s o DOF rle n p l tr me TPR& S f pa allma i u ao sna d 2- PR sa ls d i h spa r Fisl wa nay e n t i pe . r t y,t c e he s r ws
,
链 第 个转 动 副 的角速 率 ; ( =12 3 表 示 主 动 滑 口 i ,, )
式() , 。 8 中 为支 链 1 3的驱动 雅克 比矩 阵 , , 且
移副的线速率. = ,+ ,=[T)] , 表示 支 磊 辱 T, O ,
链 13产生 的运 动螺 旋 , 表示 支 链 2产 生 的运 动 ,
为直角 , 为斜 边 中点 , 到 3个 顶点 的 4、 其
长度 为 a 、 a = Aib =B 建 立 固定 参 考 坐 标 b ( A , f B )
三自由度碰撞振动系统的周期运动稳定性与分岔

第21卷第3期 工 程 力 学 Vol.21 No.3 2004年 6 月ENGINEERING MECHANICSJun. 2004———————————————收稿日期:2002-10-30;修改日期:2003-5-29基金项目:国家自然科学基金资助项目(10072051)和教育部高等学校博士学科点专项科研基金资助项目(20010613001)作者简介:丁旺才(1964),男,甘肃天水人,副教授,博士研究生,从事车辆工程与非线性动力学研究;(E-mail: dingdd@) 谢建华(1957),男,浙江绍兴人,教授,博士,从事非线性动力学与控制研究; 李国芳(1977),男,山西太原人,硕士研究生,从事车辆动力学研究文章编号:1000-4750(2004)03-0123-06三自由度碰撞振动系统的周期运动稳定性与分岔丁旺才1,2,谢建华1,李国芳2(1. 西南交通大学应用力学与工程系, 四川 成都 610031; 2. 兰州交通大学机电与动力工程学院, 甘肃 兰州 730070)摘 要:建立了三自由度碰撞振动系统的动力学模型, 推导出系统n -1周期运动的六维Poincar é 映射, 根据映射Jacobi 矩阵的特征值来分析n -1周期运动的稳定性。
数值模拟了1-1周期运动的Hopf 分岔和周期倍化分岔, 进一步分析了当分岔参数变化时碰撞振动系统周期运动经拟周期分岔和周期倍化分岔向混沌的演化路径, 其中有的路径是非常规的。
关键词:碰撞振动;Poincar é 映射;稳定性;Hopf 分岔;周期倍化分岔;混沌 中图分类号:O322 文献标识码:ASTABILITY AND BIFURCATIONS OF PERIODIC MOTION IN ATHREE-DEGREE-OF-FREEDOM VIBRO-IMPACT SYSTEMDING Wang-cai 1,2 , XIE Jian-hua 1 , LI Guo-fang 2(1. Department of Applied Mechanics and Engineering, Southwest Jiaotong University, Chengdu 610031, China; 2. School of Machine-electrical and Power Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China)Abstract: A three-degree-of-freedom vibro-impact system is considered in this paper. Based on the solutions of differential equations between impacts, impact conditions and match conditions of periodic motion, the six- dimension Poincar é maps of n -1 periodic motion are established. The stability of the periodic motion is determined by computing eigenvalues of Jacobian matrix of the maps. If some eigenvalues are on the unit circle, bifurcation occurs as controlling parameter varies. By numerical simulation, Hopf bifurcation and period- doubling bifurcation of 1-1 periodic motion are analyzed. As controlling parameter varies further, the routes from periodic motion to chaos via quasi-periodic bifurcation and period-doubling bifurcation are investigated, respectively. One of the routes is found to be non-typical.Key words: vibro-impact; Poincar é map; stability; Hopf bifurcation; period-doubling bifurcation; chaos1 引言碰撞振动是工程实际中一种普遍存在的现象。
颗粒物料在三自由度振动筛面上的运动仿真
运动 的模 型进行 仿 真 , 颗粒 物 料在 筛 面 径 向的 位移 对
和速 度变化 规律 进行 分析 。
1 两平移一转 动 的三 自由度振动 筛面 的运 动
形 式
传统往复振动筛的运动形式近似为沿振动方向的
简谐 振 动 , 面 的位移 方程 为 筛
式中
r 一工 作 面沿振 动方 向 的单 振 幅 ;
一
振 动 圆频 率 ;
t 时 间。 一
将位 移分 解 到 方 向 ( 面轴 向方 向 ) Y方 向 筛 和
( 面法 向方 向 ) 便 得 到 方 向和 Y方 向 的 分 位 移 。 筛 , 若 分别 选取 振 幅和频 率 , 到 方 向 和 Y方 向 位移 方 得
运 动形 式近 似沿 振 动方 向的 简谐 振 动 j 。工 作 时 , 颗
s :rs 6 it t i s o n n
() 3
粒 物料 在筛 面 的径 向( 面平 面 内垂直 于入 料端 筛 边 筛
和 出料 端筛 边 中点 连 线 的 方 向 ) 本 无 运动 , 料 在 基 物
式中
6 振动 方 向与筛 面 的夹角 ; 一
—
方 向的单 振幅 ;
筛 面上 难 以快速 散布 , 响 了筛 分效 果和效 率 。 影
本文 将筛 面沿振 动方 向的简谐 振动 分解 为沿 筛 面
一
方 向的振 动 圆频率 ;
r , 一y方 向的单振 幅 ; ∞ _ y方 向的振 动 圆频 率 。 - 在 此基 础上 , 加 筛 面 法 向转 动 , 成 一 个 三 自 增 构
由于本 文重 点在 于研 究筛 面法 向转 动 对筛 面上颗 粒物 料运 动产 生 的 影 响 , 了方便 理 论 分 析 ,采 用 圆 为 球形颗 粒 物料 , 其 半 径 为 R; 面水 平 放 置 , 设 筛 即筛 面
一类单自由度碰撞振动系统的混沌与最优碰撞

x } m
x / m
∞t / r a d
( a)胸 相 图 ( t o = 4 . 2 5 r a d / s )
( b )胂g 相图 ( ∞= 4 . 2 1 r a d / s )
( c ) ̄ P o i n c a r 6 投影图 ( ∞: 4 . 2 1 r a d / s )
3 最优 碰撞
3 . 1 基 本 思 想
=“ ( ) 称 为一个 控 制 。
由于实 际 系统 的控 制 参 数 都 是 有 限 的量 , 不 能 取
无 限大 的 值 , 若将这些值看作点 , 则 它 们 位 于 欧 式 空 间 的有 界 的闭集 称 之 为 控制 域 【 , , 将 定 义 在 时 间 t的
—
z,
/ - g -  ̄ -, 选 择振 子 与刚性 约束 A f  ̄ I gN a - , t N P o i n c a r 6
截面进 行分 布。
2 混 沌 碰 撞 振 动
连接 , 并 受到 简谐激 振力 P ・ s i n ( o t t +r ) 的作 用 , 振 子 只作水 平方 向的运 动 。当振子 的位 移 X 等 于位 移 B(
… … … … … … … … … … … … … … … … … … … …
( 】 0)
・
l 2 4 ・
机 械 工 程 与 自 动 化
2 0 1 3年 第 3期
至此 , 问 题 就 归 结 为 在 周 期 碰 撞 条 件 ( 丁) 一 z ( O ) =6下确 定控制 n ( £ ) 使得 式( 1 0 ) 定义 的泛 函取最
供 了理 论 参 考 。
关 键 词 :混 沌 ; 最优 碰 撞 ;振 动 系 统 ; 单 自 由度 中 图 分 类 号 :TP 3 9 L 7 文 献 标 识 码 :A
三自由度运动平台的运动仿真及控制设计
· 59 ·
三 自由 度运 动 平 台 的 运 动 仿 真 及
2.3 三维 模型 的 绘制 在进 行 了 机构 运 动 学逆 解 后 ,还 需 要 正 确地 绘
制 三 维模 型 。现 以图 1中 A。,P。处 的 电动缸 为 例 ,
ቤተ መጻሕፍቲ ባይዱM ovem ent Sim ulation and Control Design of 3——DOF M otion Platform
NIE Liang—bing,W ANG Pei—jun,PAN Xuan,CHENG Hong—zhao (School of M echanical Engineering,Southwest Jiaotong U niversity,Chengdu 610031,China)
摘 要 :通过 对 并联 机 构 的三 自由度 运 动 平 台的 正 逆 解 分 析 ,采 用 VC + + ,以 OpenGL 为 图 形 API,并 利 用 坐 标 系 变 换 的 方 法 ,实 现 了运 动 机 构 的 参 数化 和 实 时动 态的三 维可视 化仿 真 。根 据仿 真 结 果 ,利 用 MPC2810运 动 控 制 卡 ,提 出 了 以 直 代 曲 的 运 动 控 制 方 法 ,为 实 际 的 机 构 运 动 控 制 提 供 了 必 要
2 3一RPS机 构 仿 真 系统 设 计
2.1 三 维模 型 的显 示 在 进行 三 维 运 动仿 真 前 ,必 需 完 成三 维 模 型 的
三维 显示 ,这 是完 成 后 续 各 项 功 能 的基 础 。OBJ文 件是 一种 标 准 的 3D模 型文 件格 式 ,适 合 用 于 3D软 件模 型 之 间的互 导 。 目前 ,几乎 所有 知名 的 主流 3D 软件 都支 持 OBJ文 件 的读 写 。在 系统 中 ,编 写 了相 应 的 函数 来 对 OBJ文 件 进 行 解 析 和 读 取 。通 过 Pro/E或 3ds Max等 三维 软 件 ,建 立 起 三 维基 础 模 型 ,然 后将 其 导 出为 OBJ文 件 ,最 后 对 其 读 取 并 绘 制三 维模 型[2]。 2.2 3一RPS机 构 逆 解 分 析
3自由度Delta并联机构的特性分析与运动仿真

AbstractParallelrobothasmoreadvantagesthanserialrobots.3degreeoffreedomparallelrobotisanimportantpartinthefamilyofparallelrobot.DeltaParallelRobotwithitshighspeed,highrigidity,highprecision,hastheadvantagesoflargeworkingspace.Itisintheindustrial,medicalandotherfieldsareplayinganimportantrole.Itisalsoincreasinglysubjecttopeople’Sattention.Inthispaper,byusingthedeltarobotastheresearchobject,analysesitscharacteristicsandmotionparallelsimulation.Theresearchcontentmainlyincludesmechanismcharacteristicmatrix.workspace,motionreliability.Parallelmechanismconfigurationandvariouspartsofthemotoroutputarethebasiccharacteristicsoftheparallelmechanism.FirstIobtainabranched(SOCS)featurematrixoftheparallelmechanism.ThenIthroughthestudyofparalleltheorem,synthesisofthebranchedmotion,Igetthewholecharacteristicmatrixofparallelmechanism.Theworkspaceisanimportantstandardtomeasurethequalityofparallelrobot.ItiSalsoanimportantcharacteristicofparallelmechanism.Accordingtothehelixstructureofdeltaparallelmechanism,lsetupthespacecoordinatesystem.Therelationbetweeninputsandoutputs.IestablishtheconstraintequationsandtheJacobimatrix.1establishequationaccordingtotheinfluenceofdexterityofparallelmechanism.1makethesizeparametersofthemechanismiSbetter.Imakethesizeparametersofthemechanismisbetter.Igettheworkingspaceofparallelmechanismbysurfaceenvelopeprinciple.Istudyontheeffectofdifferentparameterstotheworkspace,fmdthemethodtOoptimizetheworkingspace.Sincetheoriginalerrorsofdifferentinstitutionshavedifferentsources.MotionreliabilityisanimportantcharacteristicofDeltaparallelmechanism.1setupthemechanismpositionerrorcontainsthedimensionerror,mechanismofrotatingiointclearanceerroranderrorcalculationmodel.Igetthemotionreliabilityofmechanism.MotionreliabilityanalysisiSameasureofthestandardMotionaccuracyofthemechanism,andmotionreliabilityanalysisisabasicofmechanismoptimizationdesignanderrorcompensation.Finally,lcarriedonthemovementsimulationoftheDeltaParallelmechanism.Iestablishedthemodelof3DmodelingsoftwarewithSolidWbrks.inaccordancewiththeanalysisonthemechanismofconfiguration.ThroughtheestablishmentofSolidW|orksinterfacewithMatlab/SimLink.1willentitymodelintotheparallelmechanisminMatlab.GetconnectionmoduleintheMatlab/SimlinktoolboxinSireMechanics.1wereaddedtoactivememberandthemovingplatformmoduleandsensor.Getwiththeforwardsolutionofparallelmechanismdirectly.Andthecorrectnessofverificationmechanismmotionoutput,workingspace,motionreliabilityanalysisonthemechanismofpositivesolution.Keywords:DeltaParallelmechanism;Characteristicmatrix;Workspace;MotionReliability河北工程大学硕士学位论文厂(s)=五万丽(4.11)应用矩法(数理统计中的算法)可以近似的求得f(S)的均值和方差并通过蒙特卡罗法【381(是一种计算机化的数学方法)确定总位置误差的分布。
多自由度碰撞振动系统的位置控制方法分析
多自由度碰撞振动系统的位置控制方法分析陈俭勇【摘要】通过分析多自由度系统的振动,以二自由度碰撞振动系统为例验证了控制效果,并在不同强度的随机激励下讨论了该方法的稳定性.数值模拟表明该方法是研究多自由度碰撞振动系统控制问题的有效方法.【期刊名称】《山西建筑》【年(卷),期】2019(045)012【总页数】2页(P44-45)【关键词】多自由度;碰撞振动系统;位置控制【作者】陈俭勇【作者单位】武汉职业技术学院,湖北武汉430074【正文语种】中文【中图分类】TU311以简单的梁为例,研究其横向振动时,就要用梁上无限多个横截面在每个瞬时的运动情况来描述梁的运动规律,因此一根梁就是一个无限多自由度的系统。
对于这样系统要得到精确解,需要花费很多时间。
但是,一般情况下我们可以对弹性振动问题由无线多自由度简化为有限多自由度进行分析,得到它主要的、即较低频密的振动特性与规律,这样就可以满足机器设计与使用上的要求。
基于此,研究多自由度系统的振动就具有很高的工程应用价值。
汽车报告分析中,常把汽车的自由度系统作为对象进行研究。
1 多自由度系统的振动本文应用“矩阵代数”这一数学工具来研究多自由度系统的振动问题。
这一数学工具同电子计算机的应用是密切相关的。
这里的研究将为用有限单元法解决相关问题打下基础。
1.1 以汽车振动问题为例讨论振动模型的建立1)建模方法1。
单自由度模型:不计轮胎的质量和弹性分析车身垂直振动的最简单的单质量系统,适用于低频激励情况(5 Hz以下)。
2)建模方法2。
两自由度平面模型:将车身、车轮质量单独进行考虑,忽略轮胎阻力。
设置m1为车轮质量,m2为车身质量。
3)建模方法3。
四自由度平面模型:车身考虑垂直和俯仰自由度,前后车轴有两个垂直方向自由度。
4)建模方法4。
七自由度空间模塑:车身考虑垂直、俯仰(pitch)和侧倾(roll)三个自由度,车轮有四个垂直方向自由度。
1.2 多自由度系统的研究方法基于Lyapunov稳定性理论,可以推导出稳定的控制单边约束的多自由度碰撞系统达到定义域内预期位置的算法,在此基础上可以设计一个新的位置控制器,使该类系统实现混沌控制目标。
三自由度齿轮传动系统振动模型及计算【打印】

三自由度齿轮转子轴承系统的间隙非线性模型及方程一个典型的单级齿轮转子一轴承传动系统包括箱体、滚子轴承、支撑轴、齿轮副等零部件,如图2.1所示。
在进行传动分析时,为了使问题简化,箱体被看作是固定的;忽略原动部件惯性载荷的影响,即假设这样的惯性元件是通过柔性的联轴器与齿轮箱联接。
同时假设系统关于齿轮平面对称,故系统的轴向运动可以忽略不计。
该系统的运动微分方程可写成如一般的形式为[]{''()}[]{'()}[]{(())}{()}M x t C x t K f x t F t ++= (2.1)式中[]M 表示时不变的质量矩阵,()x t 表示位移向量[]C 为时不变的阻尼矩阵,即不考虑轮齿分离及时变的啮合特性对啮合阻尼的影响。
刚度矩阵[]K 为周期时变矩阵:[()][(2/)]h K t K t πω=+,h ω为齿轮啮合的基频。
(())f x t 为间隙非线性函数,本文用分段函数如图2所示(包含轴承径向间隙和齿侧间隙),{()}F t 为系统激励力向量。
1. 数学模型的建立:使用集中质量法建立如图1.2所示的单级齿轮传动的动力学模型,认为系统由只有弹性而无质量的弹簧和只有质量而无弹性的质量块组成,则式((1.1)表示的多自由度系统的可简化形式为三自由度非线性齿轮传动系统模型,包括齿轮惯量1I 和2I ,齿轮质量1m 和2m ,基圆直径1d 和2d ,如图3所示。
齿轮啮合由非线性位移函数h f 和时变刚度h k ,线性粘性阻尼h C 描述。
轴承和支撑轴的模型则由等效的阻尼元件和非线性刚度元件表述。
阻尼元件具有线性粘性阻尼系数1C 和2C ,非线性刚度元件由近似分段线性的间隙型非线性力一位移函数1f 和2f ,以及相应的刚度参数1k 和2k 确定。
同时考虑因输入扭矩波动引起的低频外激励和静态传动误差()e t 导致的高频内部激励,忽略输出扭矩的波动,即认为:111()()m a T t T T t =+ 22()m T t T =式中:1()T t 为输入扭矩1m T 为输入扭矩均值1()a T t 为输入扭矩变化部分2m T 为输出扭矩均值并假设在支承上均作用有外径向预载力1F 和2F 。
一类两自由度分段线性振动系统的仿真分析

第3 3卷 第 4期 2007年 2 月
山 西 建 筑
S HANXI ARCHI E n I T RE
V0 . 3 No. 13 4
Fb 20 e. 07
・6 ・ 7
文章 编号 :0 96 2 10 7 0 .0 70 10 —8 5 20 } 40 6 —2
1 系统模型
对一类两 自由度分段线性振动系统进行分型 。
02 . o4 o6 o8 .
时问 ts /
r×l ’ O
5
a 质体 的振动曲线 )
潍
圈 1 两 自 由 度分 段 线 性 撮 动 系 统
趟
。
个方面, 仿真分析给定初始条件下该系统的自由振动。
非线性 系统 的周期 响应 求解 是十 分 困难 的。 目前 人们 已提 出 了 为 了全 面分 析无阻尼 自由振动 响应 , 别对 三种情况进行 了 分 多种方法来进行 分 析 , 主要 有 针对 强 非 线性 系 统 的谐 波平 衡 如 仿真分析:) 1质体 m1 有初速度, 质体 m2 无初速度。2质体 棚- ) 法 、 辽金 法… , 伽 以及 针对弱非线性 系统 的 K M 法 、 B 摄动法等 2。 和质体 棚2 有相同的初速度。3质体 m1 ) 和质体 棚 有不同的初 2 搀 但在实际求解中, 这些方法都存在着适用条件问题或逼近精度的 速度。其 他初始 条件 取: =1 . g 2 0 0 1 , 1 m1 0 0 k , =1. g 矗 = 【 ∞ ∞ 0 ∞ ∞ m 问题 , 并且求解计算复杂 。
m2 2十(2 3x 2 x 一 ) x c +c) 2 +k ( 2 1 =F2t 。 ( ) 当 2 >6时 : ml l+( l 2xl+k 31 2 1 2 =F1t , X C +c) l7十k ( 一X ) ( ) m2 2十( 2 3x 2 2 1 +矗 ( 2 b =F ( ) x c +c) 2 十正 ( 一z ) 3 x ) 2 t 。
三自由度并联坐标测量机的运动建模与仿真
虚拟环境下三自由度并联坐标测量机的运动建模与仿真摘要并联坐标测量机是一种新类型的坐标测量系统,它模拟多足生物的运动形式。
+由于运动的复杂性,只凭计算数据很难直观、准确地判断测头的位置和姿态,必须通过虚拟样机模拟并联坐标测量机的作业过程。
本文在Windows XP 环境下,通过VC++调用OpenGL函数,对测量机的各部分零件进行实体造型,并按照零件间的装配关系进行实体装配,获得坐标测量机的三维仿真图,再与运动学位置分析的正解模型和反解模型相结合,开发出能实时运动的三维并联三坐标测量机的虚拟样机,实现高效率、低成本的仿真作业。
经测试证明,该系统运行可靠,效果逼真,为研制真实样机提供了手段。
由于本人水平有限,文中的错误和不足在所难免,恳请各位老师给予批评和指正。
关键词:三自由度;坐标测量机;虚拟样机;并联机构Kinematic Modeling and Simulation of 3-DOF Parallel CMM Base onVirtual EnvironmentAbstractThe parallel mechanism CMM (coordinate measuring machine), as a new type of CMM, simulates the motion form of multiped. Because of its complicated motion, it is difficult to judge the position and stance of probe intuitionisticly and exactly only by calculational data. It is obligatory to simulate the operation process of parallel mechanism CMM by virtual prototype. In the paper the OpenGL functions are transferred by VC++ under the windows XP so that the various parts of CMM are entity-sculpted, and entity-assembled according to the constructional relation between parts. So the 3D simulative figure of CMM is obtained. Moreover, combining with the kinematics obverse solution model and reverse solution model of position analysis, the virtual prototype of three-freedom-degree parallel mechanism CMM is developed, which can motion in real time and realize simulative operation in high efficiency and low cost. It is proved by test that this system runs reliably, has realistic effect and provides means for manufacturing actual prototype.Because of the limits of the author`s ability ,there may be some mistakes and shortcomings in it ,thanks a lot for your pointing out the mistakes for correction.Keywords:Three-degrees-of-freedom;Coordinate-measuring Machine;Virtual Prototyping;Parallel-link Mechanism目录第1章前言 (5)1.1 课题研究的学术背景 (5)1.2 国内外研究现状 (6)第2章三自由度并联CMM的结构及工作原理 (9)2.1 并联运动机构概述 (9)2.2三自由度并联CMM的结构及机械运动原理 (10)2.3 控制系统结构及工作原理 (10)2.4 虚拟现实技术 (12)第3章OpenGL三维图形设计与制作 (14)3.1 OpenGL简介及基本操作 (14)3.2 在Win32环境下运行OpenGL程序 (15)3.3 程序框架窗口的建立 (16)3.3.1 工程的建立 (16)3.3.2 添加静态库 (16)3.3.3 窗口的初始化 (16)第4章坐标测量机测量空间分析 (18)4.1并联机构坐标测量机的运动学约束 (18)4.1.1连杆杆长约束 (18)4.1.2 运动副转角约束 (18)4.1.3 连杆杆间干涉 (19)4.2确定测量空间的基本方法 (19)4.3计算机仿真结果分析 (20)第5章三自由度并联坐标测量机虚拟原型开发 (22)5.1 虚拟原型样机的几何层次结构 (22)5.1.1 虚拟原形样机几何模型的获取方法 (23)5.1.2 虚拟原型样机的形象建模 (23)5.1.3 虚拟原形样机的几何造型过程 (25)5.2 三自由度并联坐标测量机虚拟原形样机的运动建模 (26)5.2.1 三维图形几何变化的数学基础 (27)5.2.2 三自由度并联坐标测量机运动机构的运动特征描述 (29)5.3 虚拟原型样机的运动过程仿真 (30)第6章结论 (36)参考文献 (37)致谢 (39)附录 (40)第1章前言1.1 课题研究的学术背景坐标测量机(coordinate measuring machine,CMM)是实现“空间坐标”测量的重要工具,是一种集机械、光学、电子、数控技术和计算机技术为一体的大型精密智能化仪器,是现代工业检测、质量控制和制造技术中不可缺少的重要测量设备,其技术水平是现代测量技术和制造技术水平高低的一个重要标志,因此,对CMM理论和技术的研究一直是国内外学术界和工业界关注的热点[1-4]。
一类两自由度碰撞振动系统的周期运动与稳定性
一类两自由度碰撞振动系统的周期运动与稳定性摘要:冲击振动问题在机械、车辆和核反应堆工程等应用领域中经常遇到。
在机械生产中,对于含间隙机械系统和冲击振动系才统而言,如何趋利避害、进行动力学优化设计、提高可靠性以及降低噪声等问题的研究,既具有理论价值又有着重大的现实意义。
一些根本问题的解决,将不仅推动非线性学科的发展,同时为工程设计提供全新的准则。
因此,近年来含间隙系统的研究已引起国内外学者的普遍关注。
关键词:两自由度振动系统;动力学本文根据动力学的理论,建立两自由度振动系统的动力学方程。
首先,对模型进行分析,求出运动的微分方程,采用正则模态矩阵将系统解耦,运用解析法推出了Poincaré映射的解析解,由初始的边界条件推导其稳定性,编程实现非线性系统的数学模型;然后选取合适的参数,调出系统通向混沌的Poincaré图进而分析非线性系统的动力学特性。
基于六维Poincaré映射方法研究了系统的Hopf 分岔和Hopf-flip余维二分岔以及由环面倍化和概周期通向混沌的过程。
对该系统的分岔与混沌行为的研究为工程实际中含间隙对碰机械系统的优化设计提供了理论依据。
1.概述确定性非线性动力学系统中对初值极为敏感的,貌似随机的运动称为混沌。
它不同于无序、紊乱或噪声,具有某种自相似结构。
它起源于非线性相互作用,因而普遍地存在着。
混沌振动之所以产生,是由于非线性振动系统对初始条件的敏感性[1]。
为什么初始条件的微小差别会产生捉摸不定的混沌原信息就损失一位,若有位信息,经次迭代,就完全损失原有信息。
由于迭代次后,原来小数点后第位,迭代成第一位,则两个仅有小数点位后微小差别的初值,迭代次后,差别就变大,故非线性系统对初始条件的微小差别是十分敏感的[2]。
正如poincaré所说,“初始条件的微小差别,最终导致根本不同的现象,本来难以预测”,这就是混沌产生的数学机理[3]。
一般,混沌振动研究的问题有:(1)机理,即研究混沌振动出现的原因;(2)参数,即研究混沌振动出现的条件,估计出现混沌时系统的参数;(3)通道,即研究从规则振动通往混沌振动的道路;(4)识别,即研究混沌振动的定性特征与定量特征,识别的方法和手段;(5)控制,即由混沌振动的多样性,控制系统参数,灵活地得到所需的各种不同的稳定运动状态;(6)模拟,即用混沌振动装置,作为简单可靠的拟随机振动发生机构,用混沌信号模拟噪音环境。
一类两自由度碰撞振动系统的周期运动与稳定性
一类两自由度碰撞振动系统的周期运动与稳定性
罗冠炜;谢建华;孙训方
【期刊名称】《兰州交通大学学报》
【年(卷),期】1999(018)002
【摘要】提出了研究两自由度碰撞振动系统的周期运动及其稳定性的判别方法,计算了此碰撞振动系统的动态呼应,数值算便了该方法的有效性。
【总页数】8页(P47-54)
【作者】罗冠炜;谢建华;孙训方
【作者单位】兰州铁道学院机械系;西南交通大学应用力学与工程系
【正文语种】中文
【中图分类】TH113.1
【相关文献】
1.一类两自由度碰撞振动系统的周期运动稳定性与分岔
2.两自由度塑性碰撞振动系统的周期运动与稳定性
3.一类两自由度含间隙碰撞振动系统的动力学特性
4.一类碰撞振动系统的概周期运动及混沌形成过程
5.一类碰撞振动系统周期运动的全局稳定性
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[
+
愚
[ 2
。
)
基 金项 目 : 肃 省 自然 科 学 基 金 资 助项 目(Z 0 2B 50 7 甘 3 S 6 一 2—0 )
作者简介 : 王丽( 9 9 )女 , 17 一 , 甘肃榆中 , 汉族 , 兰州城市学 院, 讲师 , 硕士 , 主要研究 方向 t 微分 方程 与动力 系统
收 稿 日期 :0 1 1 -8 2 1 —0 0
警 ,nJ . ∞ 摆1 I =Y , F 0 √ , 麓, =
y =8/ { , 1 2, , 一 , 3
Hale Waihona Puke 器相 连 接 , 个 质 量 块 水 平 方 向运 动并爱 激 则在 任 意 连 续 两 次碰 撞 之 间 , 三 系统 运 动 微 分
△ 2, 3 A ) 和 AX 一 ( 1 A 1 , o 舭 +, t + , x0
A z, 2 xa o
3 △r) + , 是 P icr 面 on a6截
上周 期 2 / —1 1运动 不动 点
X ( +, l , 2 , o 2 Z ) = 尘l X 0 X o 2 , +,' ) 0
第3 O卷第 1 2期
21 年 1 01 2月
数 学 教 学 研 究
4 5
=
fi +  ̄n o( {}wr .s t ,
一
z / 周 期 运 动 将 可 能 发 生 内 依 马 克 一 沙 —i l
() 1
克分 岔.
2 数 值 仿 真
() 2
m 。
芏。 7 +2
尘。 。 。 十七 X
统在 特 定 参 数 变化 下 周 期 运 动 向 混 沌 转 迁 的 途 径 . 值 仿 真 结 果 表 明 在 特 定 参 数 变 化 下 系统 的 周 数 期 运 动 会 发 生 内依 马 克 一 沙克 分 岔 , 在 经 过 锁 相 或 环 面倍 化 向 混 沌 转 迁 的 途 径 . 存
图 1 一 类 三 自由度 碰撞 振 动 系 统 模 型
假设 M1 , 0 P — I I I z + S0 Kle , o + r P。 Pf
1。, l并令 P
一 一
等 ,
1 系统 运动方 程 与 P ic r 映 射 on a6
, f ,一 C , 0 8丽
关 键 词 : 动 ; 定 性 ; 值 仿 真 ; 岔 l 沌 振 稳 数 分 混
中 图分 类 号 : 3 2 0 2
0 引 言
目前 国内外许 多学 者 用 现代 动 力 系统 观 点 主要 研 究 单 、 自由度 碰 撞 振 动 系 统 的 动 双 力学 行 为 , 如研 究 系 统 的 稳 定 性 与 分 岔 [ ] 1 、 q
l +一 + : 一 R I 3 ~一 岛 一) ( 3 z = ,x 一 l () 4
f 一03 ,2 0f —0 6 , l . 6 , — , 3 . 4
一 0 0 R= 0 7 . 2, ..
其 中 , 一, 。 及 +, 。 别 表 示 振 子 M1 尘一 尘 +分
生锁 相 , 图 2 c ; 数 再 增 加 , 见 ()参 系统 进入
混沌 运动 , 图 2 d . 见 ()
的扰 动 向量 . 将映 射( ) 4 变换 为
A (, ) - , A ) () X =于 x 一X ( ,X . 5
映射 ( ) 5 在 =I i不动 点处 的线性 化 矩 / 阵为
类 型 冲 击 振 动 系统 的周 期 运 动 、 定 性 与分 稳 岔等 问题 的研 究 .
参 考 文 献
取 作 为 分 岔 参 数 , 当 ∈ [ . 5 1 6 9 ) 1 6 ,. 8 1 , D oo 的三 对 复 共 轭 特 征 值 都 位 于 复 平 fG , ) 面 的单 位 圆 内 , 统 具 有 稳 定 的 周 期 z一 系 1 I运动 . / 当 递 增 穿 越 6 0 一 1 6 9 . 8 1时 ,
数 学 教 学研 究
第 3 第 l期 O卷 2
21 0 1年 l 2月
选取 系 统参数 ( ) 2:
l l, 2 2, 3 1 2, — m = — .
k — k = l, — 0. l 2: = k3 9,
3 结 论
本文 建立 了 一类三 自由度 相对 碰 撞 振动 系统 的数 学 模 型 与 P icr on a6映射 , 分 析 了 并 系统 在特定 参 数变 化下 周期 运 动 向混 沌转 迁
Df o O 的一 对复 共 轭 特征 值 . 越 单 位 ( ,) o 。 穿 圆周 , 余 特征值 仍 然保 留在 单 位 圆周 内 , 其 系
统 失稳发 生 弱共 振条 件下 的内 依 马克 一沙 克 分 岔 , 撞 映射 点 沿 多 条 “ 线 ” 渐 远 离 不 碰 轨 逐 动点 , 在投 影 P icr 面 上 形 成 一 吸 引 不 on a6截 变圈 , 图 3 a ; 见 ( ) 随着 参 数 的增 加 , 统 发 系 生 环面倍 化 ( 丁 /环 ) 见 图 3 b ; 数 再 2i , ()参 增加, 系统再 次 发 生 环 面倍 化 ( /环 ) 见 2 ,
[ ] S a a d Home . P r dcl 1 hw S W n l s P J A ei i l o ay
F re i e i ierO cltr J .o ra ocdPe w s L na siao []J un l c e l
4 4
数学教学研究
第 3 卷第 1 期 21 年 1 月 o 2 01 2
一
类三 自由度碰撞振动 系统运动的稳定性及数值仿真
王 丽
( 州 城 市 学 院 数 学 学 院 ,甘 肃 兰 州 7 0 7 ) 兰 3 0 0
摘 要 : 文 建 立 了一 类 三 自 由度碰 撞 振 动 系统 的教 学模 型 与 P icr 射 , 数 值 仿 真 分 析 了 系 本 o a6映 n 并
与局 部分岔 . 当 穿越 ( 岔值 ) , 分 时 系统 的
周 期运 动 将 发 生分 岔 , Df 7 O 有 一 对 复 若 ( ,) 2
-
0 8 . 6 . 2 0 0R0 I . —0 5 -0 3 _ . 60 4
l
— 8- S — 0. 0. 2 0 240.40.2 0。 0 3 6
X = X。+ AX AX = ( 窖1 , 1,A o , △ + Ax 0 x2,
成一 吸 引 不 变 圈 , 图 2 a ; 着参 数 的 见 ()随
增加 , 引不变 圈逐 渐膨 胀并 变 得不 光 滑 , 吸 见 图 2 b ; 数 c再 增 加 , ()参 E J 吸引 不 变 圈破 裂 , 发
建立 周期 =1 1 动 的 P icr /运 on a6映射
X 一7 x , (, )
碰 轨 () 马克一 沙克 分 岔 , 撞 映 射 点 沿 多 条 “ 线 ” 4
逐 渐远 离不 动 点 , 投 影 P icr 面 上形 在 on a6截
式中, X∈R。 是一 个实 参数 , , X—X +△ X,
图 1 示 为一类 三 自 由度 碰撞 振 动 系统 所
模 型. 量 为 Ml M2的 质 量 块 由刚 度 为 质 和
K 和 K 的线性 弹 簧及 阻尼 系数 为 C 和 C 2 的线 性阻 尼 器 相 连 接 , 量 为 质 的 质 量 块 由刚度为 K。和 阻 尼 系 数 为 C 。的 线 性 阻 尼 振力 F =P s ( , T i OT+r , 一 1 2 3的作 用. n )z ,, 当质 量块 ^ 的位移 X。 质量 块 Ml 与 的位移 X 之差 等 于间 隙 △时 , 质量 块发 生相互 碰 两 撞 . 撞后 两质 量块 又 以新 的初 值 运 动 , 碰 然后 再次 碰撞 , 如此 往 复.
^M ^ 一
●— !呻 = — = ]
—
T
I
,
X3
奇 异 性 [ 概 周 期 碰 撞 运 动 [ 倍 周 期 分 、 5 _ 、 岔[ 混沌 控制 等 , 因复 杂 性对 多 自由度 、 。 而 碰撞 振 动系统 的研 究很 少 开展 . 文 在文 E3 本 3
.
共 轭 特征 值 穿 越 单 位 圆周 , 余 特 征值 仍 在 其
单 位 圆周 内 , 这 种 情 况 下 冲 击 振 动 系统 的 在
() c ∞= 2 5 1 . 5
( )E 2 5 d (= . 6 J
图 2 质 块 M 投影 P i a6 射 图 的 on r 映 c
4 6
分别 为质块 M 与 M3的碰 撞 次 数 和 力 周 期 数. O  ̄, 令 =o 选择 截面 t
:=
动. ∞递增 穿越 ( : 2 4 9 5时 , ( , ) 当 c = .4 6 J= Df o O J 的一 对复共 轭特 征值
1 一 一0 3 4 9 8 0 9 8 7 9 . 2 . 9 5 4 ± . 1 8 0
和 I] - 的基础 上 建 立 了 一类 三 自由 度 相对 碰 6 撞振 动 系统 的 数 学 模 型 与 P icr on a 6映射 , 并 数值仿 真分 析 了 系统 的概 周期 运 动及 通 向混
沌 的过程 .
, , , / , / ‘, / , 。, / / , ,
y= 0. = 2, :
/ 一 0 4 l — 0 一0 6 , . ,2 , 厂 . 4
艿一 0 04, = 0 8. . R .
的途 径 . 值 仿 真 结 果 表 明在 特 定 参数 变 化 数 下系统 的周期 运 动会 发 生 内依 马 克一 沙克分 岔 , 分岔 存 在 经 过 锁 相 或 环 面倍 化 向混沌 该 转迁 的 途 径. 文 的 研 究 方 法 也 可用 于 其 它 本