杆和梁结构的有限元法
杆梁结构的有限元分析原理
e
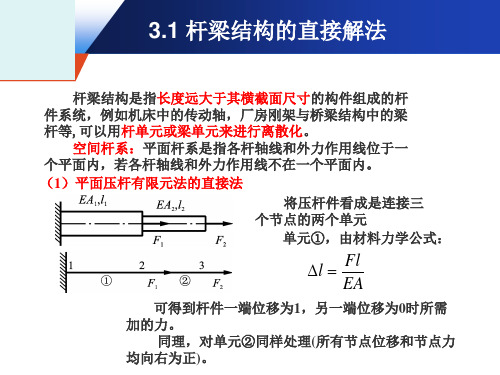
下面考察该简单问题的FEA求解过程。 (1) 离散化
两个杆单元,即:单元①和单元②
(2) 单元的特征及表达
对于二结点杆单元,设该单元的位移场为 么它的两个结点条件为
,那
设该单元的位移场具有模式(考虑两个待定系数)
利用结点条件,可以确定系数a0和a1,即
将系数a0和a1代入
,可将
表达成结点位移(u1, u2)的关系,即
其中, 为整体坐标系下的单元刚度矩阵, 为 整体坐标系下的结点力,即
由最小势能原理(针对该单元),将 对待定的 结点位移向量 取一阶极小值,有整体坐标系中 的刚度方程
对于本节给出的杆单元,具体有
4.3.3 空间问题中杆单元的坐标变换
就空间问题中杆单元,局部坐标系下的结点位移还 是 而整体坐标系中的结点位移为
这时由全部结点位移[0 u2 u3]分段所插值 出的位移场为全场许可位移场。
由最小势能原理(即针对未知位移u2和u3求 一阶导数),有
可解出
(5) 计算每个单元的应变及应力
在求得了所有的结点位移后,由几何方程
可求得各单元的应变
由方程 可求得各单元的应力
(6) 求结点1的支反力
就单元 ①的势能,对相应的结点位移求极值,可以 建立该单元的平衡方程,即
其中
由一维问题几何方程和物理方程,则该单元 的应变和应力为
其中
单元的势能
其中 叫做单元刚度矩阵。
叫做单元结点外载。
在得到“特征单元”的单元刚度矩阵和单元 结点外载后,就可以计算该单元的势能,因 此,计算各单元的矩阵 和 是一个关 键,下面就本题给出了个单元的 和 。
具体就单元①,有 单元①的结点位移向量
(5) 单元的刚度方程
杆件结构的有限元法
第一篇 有限元法
第二章 杆件结构的有限元法
当结构长度尺寸比两个截面方向的尺 寸大得多时,这类结构称为杆件。工程中 常见得轴、支柱、螺栓、加强肋以及各类 型钢等都属于杆件。
杆件结构可分为珩杆和梁两种。
和其他结构采用铰连接的杆称为珩杆。珩杆的连接处可以自由转动, 因此这类结构只承受拉压作用,内部应力为拉压应力。影响应力的 几何因素主要是截面面积,与截面形状无关。 和其他结构采用固定连接的杆称为梁。链的连接处不能自由转动, 因此梁不仅能够承受拉压,而且能承受弯曲和扭转作用。这类杆件 的内部应力状态比较复杂,应力大小和分布不仅与截面大小有关, 而且与截面形状和方位有很大关系。 建立有限元模型时,这两类杆件结构可用相应的杆单元和梁单元离散。
Ke 1 kkaa
ka
ka
中的元素在总刚度矩阵中应在位置第1行、第2行的第1列,第2列
k k
1 11
1 21
k
1 12
k
1 22
0
0
0 0 0
第2个单元的节点号为2和3,则单元刚度矩阵叠加到总刚度矩阵 的第2行、第3行的第2列、第3列元素上
0 0 0
0
k
2 22
k
2 23
0
k
2-3 杆件系统的有限元法
一、铰支杆系统的有限元计算格式 上面求解弹簧系统的有限元方法可以直接用力求解受轴向力的杆件系统。 均质等截面铰支杆,刚度值可由材料力学中力与变形的关系中获得
AE F1 L u1
k AE L
均质等截面铰支杆的力-位移方程可写为
F F12ALE11 11uu12
坐标变换
由杆件组成的机构体系称为杆系,如起重机、桥梁等。 由珩杆组成的杆系称为珩架,由梁组成的杆系称为刚架。
2_杆系结构有限元分析1
( x) Nii N j j
x x N 1 , N 其中 i 为形函数。 j l l
由材料力学扭转可知
d dN e e M GI p GI p θ GI p B θ dx dx
其中 B
dN 1 1 dx l l
§1-2 扭转杆单元
e
外力势能 V u
e
e T
fe
e
1 e T e e e T 总势能 U V u K u u f e 2
e e
§1-1 拉(压)杆单元
1 e T e e e T U V u K u u f e 2
e e e
根据最小势能原理,势能泛函取驻值的必要条件
空间杆单元坐标变换矩阵
0 T 0
单元在两个坐标系中刚度矩阵转换关系同样有
K e T T K ' T
e
矩阵中仅仅包含有坐标的倾角,仅平行移动坐标轴,刚度矩阵 中元素值不变,矩阵的阶数也不改变。
§1-2 扭转杆单元
结点位移向量θe i , j
T
结点力向量
平衡关系
杆单元结点力向量
f U i
e
Uj
T
单元在外力和内力作用下处于平衡状态,反映单元平衡状态 的关系式就是刚度方程。下面利用最小势能原理推导单元的 刚度方程。 最小势能原理:在满足连续条件和边界条件的位移中,满足 平衡条件的位移其总势能最小,反之亦然。 单元总势能
e U e V e
M e Mi , M j
T
杆件发生自由扭转时,待求位移是截面的扭转角 ( x) 在局部坐标系中,每一个点将具有一个基本未知位移,最简单 的单元位移函数可以设为
结构分析的有限元法-第三章

式中
H 1 u B A yH v
(3.32)
而
H 0 u H 0 v 0 0 0 0 1 0 0 2 0 6x
(3.33)
单元刚度矩阵
再次应用式(2.70),并进行一系列的积分运算,可以得出单元刚度矩阵的显式如下:
l
K
e
E d A B B d x
0 1 l
Av
1
2 l
0 0 1 l 2 1 l
(3.21)
MATLAB不仅可以进行数值运算,也能进行符号运算。如式(3.20)中的矩 阵Au和Av的求逆运算,我们可以在MATLAB的命令窗口下输入 >> syms L >> Au = [ 1 0 1 L ] ; >> Av = [ 1 0 0 0 0 1 0 0 1 L L^2 L^3 0 1 2*L 3*L^2] ; 第一句是定义符号变量L,后面定义两个矩阵Au和Av。然后我们再输入下 面求逆的命令 >> inv(Au) ans = 0 1 1 [ 1, 0] Au [ -1/L, 1/L] 1 l 1 l >> inv(Av) ans = 0 0 1 [ 1, 0, 0, 0] 0 1 0 1 [ 0, 1, 0, 0] A v 2 2 3 l 2 l 3 l [ -3/L^2, -2/L, 3/L^2, -1/L] 3 2 3 1 l 2 l [ 2/L^3, 1/L^2, -2/L^3, 1/L^2] 2 l
根据材料力学的有关知识,我们可以立刻写出杆单元的结点位移与结点力 之间的关系为
FNi EA l (u i u j ) FNj EA l (u j u i )
杆梁结构有限元分析
3.1 杆梁结构的直接解法
机械分社
(1)平面压杆有限元法的直接法
由节点平衡有: 即有:
U1(1)u1 U1(1)u2 N1
U
u (1)
21
(U
(2 2
)
U
(1) 2
)u2
U
(2 2
)u3
F1
U
(2 3
)
u2
U
(2 3
)
u3
F2
EA1 l1
u1
EA1 l1
u2
N1
EA1 l1
u1
( EA1 l1
3.1 杆梁结构的直接解法
机械分社
杆梁结构是指长度远大于其横截面尺寸的构件组成的杆 件系统,例如机床中的传动轴,厂房刚架与桥梁结构中的梁 杆等,可以用杆单元或梁单元来进行离散化。
空间杆系:平面杆系是指各杆轴线和外力作用线位于一 个平面内,若各杆轴线和外力作用线不在一个平面内。 (1)平面压杆有限元法的直接法
单元刚度矩阵每一列元素表示一组平衡力系,对于平面 问题,每列元素之和为零。
3.1 杆梁结构的直接解法
机械分社
(2)平面梁单元有限元法的直接法 2)节点位移与节点力之间的关系
Ui
Vi
k11
k21
M i U j
k31
k41
V
j
M j
k51
k61
他们在轴和轴的投影之和等于零:
vi
6EI l2
i
12EI l3
vj
6EI l2
j
M
j
6EI l2
vi
2EI l
i
6EI l2
vj
4EI l
第五章杆系结构的有限元法
第五章 杆系结构的有限元法 5.1 引言杆系结构是工程中应用较为广泛的结构体系,包括平面或空间形式的梁、桁架、刚架、拱等。
其组成形式虽然复杂多样,但用计算机进行分析时却较为简单。
杆系结构中的每个杆件都是一个明显的单元。
杆件的两个端点自然形成有限元法的节点,杆件与杆件之间则用节点相连接。
显然,只要建立起杆件两端位移与杆端力之间的关系,则整体平衡方程的建立与前几章完全相同。
杆端位移与杆端力之间的关系,可用多种方法建立,包括前面几章一直采用的虚功原理,但是采用材料力学、结构力学的某些结论,不仅物理概念清晰、直观,而且推导过程简单明了。
因此,本章将采用这种方法进行单元分析。
至于整体平衡方程的建立,则和前面几章所讲的方法一样,即借助于单位定位向量,利用单元集成法进行。
5.2 平面桁架的有限元分析平面桁架在计算上有以下几个特点: 1. 杆件的每个节点仅有两个线位移; 2. 杆件之间的连接为理想铰,即在节点处各杆件可相对自由转动,且杆件轴线交于一点。
3. 外载荷均为作用于节点的集中力。
由于以上特点,所以在理论上各杆件只产生轴向拉、压力,截面应力分布均匀,材料可得到充分利用,因此桁架结构往往用于大跨结构。
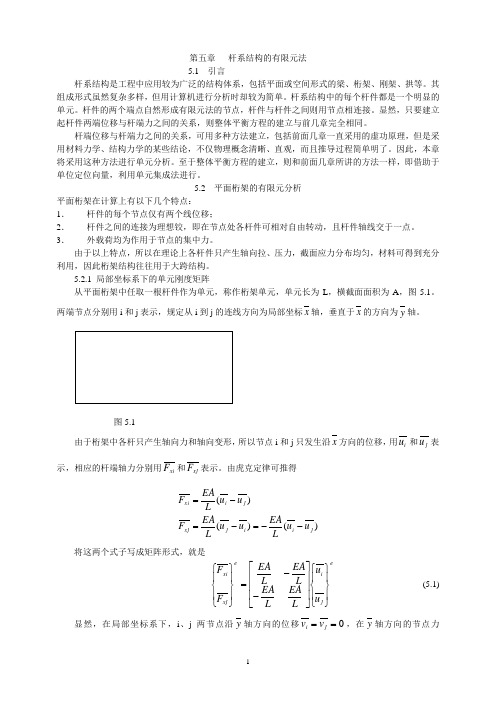
5.2.1 局部坐标系下的单元刚度矩阵从平面桁架中任取一根杆件作为单元,称作桁架单元,单元长为L ,横截面面积为A ,图5.1。
两端节点分别用i 和j 表示,规定从i 到j 的连线方向为局部坐标x 轴,垂直于x 的方向为y 轴。
图5.1由于桁架中各杆只产生轴向力和轴向变形,所以节点i 和j 只发生沿x 方向的位移,用i u 和j u 表示,相应的杆端轴力分别用xi F 和xj F 表示。
由虎克定律可推得)()()(j i i j xj j i xi u u L EA u u L EA F u u LEAF --=-=-=将这两个式子写成矩阵形式,就是e j i exj xi u u L EA LEA L EA L EA F F ⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧ (5.1)显然,在局部坐标系下,i 、j 两节点沿y 轴方向的位移0==j i v v ,在y 轴方向的节点力0==yj yi F F 。
有限元-梁系结构的有限元法
4x l
3x 2 l2
) i
x l
(3x l
2)
j
容易验证 : x 0: u ui v vi i x l: u u j v v j j
(3-1a),(3-1b)或(3-2a),(3-2b)称为平面梁单元的位移插值 函数
二、建立节点位移与节点力关系
1、 轴向节点力
E Fx A
拉压杆问题的回顾
1、杆的基本概念:
杆--轴线为直线的细长构件,沿轴线承受 拉(压)载荷; 杆模型--平面假设将杆简化为一维问题, 可由杆轴线代表; 杆变形特点--只与轴向位移相关;
拉压杆问题的回顾
2、杆有限元的基本概念
节点位移—轴向位移,每节点1个自由度; 节点力—轴力; 结构离散:轴线划分为若干直线段; 单元分析:建立节点力与节点位移关系; 节点平衡:对每一节点,建立相关节点力与 外力的平衡关系,得到一线性方程组; 约束处理:引入已知节点位移,使方程组可解
梁系结构实例
2、平面梁系
1、节点力平衡的需求--单元节点力(在 局部坐标系中)向整体坐标系的变换; 2、单元分析的需求--节点位移(在整体 坐标系中)向局部坐标系的变换; 3、结构对称性的利用(练习,作业3)。
l2 2EI
l
0
Vi
i
u
j
(3-4)
6EI l2
4EI
V
j j
l
(3-4)式是用矩阵表示的梁节点力与节点位移的关系
式(3-4)还可写成:
F
e
K e
e
(3-5)
e
F
——称为局部坐标下的节点力列向量
e ——称为局部坐标下的节点位移列向量
e
K
杆结构 分析的有限元方法(有限元)
杆单元形状函数
杆单元刚度矩阵
平面问题中的坐标变换
梁结构分析的有限元方法
梁:承受横向荷载和弯矩的杆件。
梁的主要变形为挠度v
横截面变形前后都垂直于杆变形前的轴线x轴
中性层变形=0
纯弯曲没有剪力,只有弯矩
梁截面的惯性矩
杆结构分析的有限元方法
杆:承受轴向荷载的杆件
最基本的承力结构件:杆、梁
弹簧--简单的承受轴力的结构件
有限元方法中,每一个处理步骤都是标准化和规范化的,
因而可以在计算机上通过编程来自动实现。
F=kδ
k--刚性系数
位移的绝对变化量/杆件的伸长量δ=u2—u1
应力某截面上单位面积上的内力/内力的分布集度
应变相对伸长量单位长度的伸长量
杆单元的特性是节点位移及节点力的方向都是沿轴线方向。
杆结构的力学分析
铰接的杆结构----杆只受轴力-----杆件拉伸问题---可自然离散
两端为铰接的杆件只承受轴力。
各个单元研究(基于局部坐标系的表达)
各个单元研究
离散单元的集合、组装
杆单元及坐标变换
自由度:描述物体位置状态的每个独立变量。
对于杆单元,其节点位移有两个自由度。
杆梁结构的有限元分析原理
杆梁结构的有限元分析原理杆梁结构是工程中常用的一种结构形式,它由多个杆件或梁组成,用于承担载荷和传递力量。
有限元分析是一种通过将结构离散为许多小单元,利用数学方法对结构进行分析的技术。
下面将详细介绍杆梁结构的有限元分析原理。
一、杆件离散化在有限元分析中,首先需要将杆梁结构离散化为一组子结构,即离散化为一组离散的杆件。
离散后的每个杆件可以看作是一个子系统,每个子系统由两个节点组成,节点之间以杆件连接。
通过节点与杆件的连接方式,能够模拟出整个杆梁结构的受力特点。
离散化的过程中,需要确定杆件的几何形状、截面以及材料特性等参数,并根据实际情况设置合适的杆件单元数目。
通常,单元数目越多,离散程度越高,结果越接近真实情况,但计算成本也会增加。
二、有限元法的基本原理有限元方法的基本原理是将结构分成许多小的单元,每个单元内的行为可以用简单的数学函数来表示。
对于杆梁结构,常用的单元有梁单元和杆单元。
梁单元适用于承受弯曲强度较大的杆件,而杆单元适用于承受轴向载荷的杆件。
通过将结构分成小单元后,可以建立一个与原结构相似的离散模型,并在每个单元上建立相应的方程。
三、应力应变关系在进行有限元分析时,需要获得每个杆件的应变和应力。
应变与杆件的变形有关,而应力与应变之间的关系则与材料的本构关系有关。
对于线弹性材料,应力与应变之间可以通过胡克定律来描述。
胡克定律表明,应力与应变之间成线性关系,材料的弹性模量E、泊松比ν以及应变关系能够决定应力。
应根据结构中不同材料的应变特性来选择相应的材料模型。
四、施加边界条件在进行有限元分析前,需要施加适当的边界条件。
边界条件用于模拟实际情况中的约束和限制。
常见的边界条件有固定边界、弹性边界和施工阶段边界。
五、求解位移和应力当离散化杆梁结构、建立了位移和应变关系、施加了边界条件之后,可以通过数值求解方法,例如有限元法中的坐标变形法,计算得到结构的位移和应力。
坐标变形法能够基于得到的位移结果,进一步计算应力。
第二章-杆和梁结构的有限元法案例
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
注意: 上述弹簧系统的分析求解原理和过程就是有限元 法求解连续体力学问题时对离散后系统的分析求 解原理和过程。
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
例题1:弹簧系统
已知条件:
求:(a) 系统总刚度矩阵 (b) 节点2,3的位移
单元特性
系统平衡方程
第二章 杆和梁结构的有限元法
KD F
2)单元方程扩大相加法 单元特性
F1 f11
相加
F2 f 21 f12 F3 f 22
系统节点 平衡条件
引入系统节点平衡条件
KD F
系统节点平衡方程
第二章 杆和梁结构的有限元法
2.2 杆单元和平面桁架
杆单元
2.2.1 一维等截面 杆单元
fi k f j k
第二章
k ui k u j
f kd
杆和梁结构的有限元法
2、弹簧系统的集成 1)列节点平衡方程法
F1 f11 F2 f 21 f12 F3 f 22
系统节点 平衡条件
F1 k1u1 k1u2 F2 k1u1 ( k1 k2 )u2 k2u3 F3 k2u2 k2u3
第二章 杆和梁结构的有限元法
k k k
k k
fi k f j k
k ui k u j
kii k k ji
kij k jj
§2.1.2 弹簧系统分析
求解一个弹簧系统:
1)各单元的特性分别为:
第二章 杆和梁结构的有限元法
杆梁结构的有限元分析

【典型例题】3.1.2(2) 变截面杆单元的推导
如图3-5所示,有一受轴载荷的线性变截面杆件,两端的截 面积为A1和A2,长度为l,材料的弹性模量为E,试建立描述该 杆件的一个杆单元。
3.1.3 杆单元的坐标变换
1. 平面杆单元的坐标变换
在工程实际中,杆单元可能处于整体坐标系(global coordinate system)中的任意一个位置,如图3-6所示,这需要 将原来在局部坐标系(local coordinate system)中所得到的单元 表达等价地变换到整体坐标系中,这样,不同位置的单元才 有公共的坐标基准,以便对各个单元进行集成(即组装)。图3-6 中的整体坐标系为( ),杆单元的局部坐标系为(ox)。
下面针对图3-2所示的一端固定的拉杆问题,分别讨论 基于直接求解方法以及基于试函数的间接方法的求解过程。
【求解原理】3.1.1(3) 1D问题的直接求解
【求解原理】3.1.1(4) 1D问题的虚功原理求解
先以一个简单的结构静力平衡问题来描述虚功原理的基本思 想,然后再具体求解一端固定的拉杆问题。
【基本变量】3.1.1(1) 1D问题的基本变量 由于该问题是沿x方向的一维问题,因此只有沿x
方向的基本变量,即 定义沿x方向移动为位移: u(x) 定义沿x方向的相对伸长(或缩短)量为应变: εx(x) 定义沿x方向的单位横截面上的受力为应力:
【基本方程】3.1.1(2) 1D问题的基本方程 该问题的三大类基本方程和边界条件如下:
第3章 杆梁结构的有限元分析
3.1 杆件有限元分析的标准化表征与算例
3.1.1 杆件分析的基本力学原理
杆件是最常用的承力构件,它的特点是连接它的 两端一般都是铰接接头,因此,它主要是承受沿轴线 的轴向力,因两个连接的构件在铰接接头处可以转动, 则它不传递和承受弯矩。
杆件系统有限单元法
(3)单元应力场的表达 由弹性力学中物理方程有:
σ e ( x ) = E eε e ( x ) = E e B e ( x ) ⋅ δ e = S e ( x ) ⋅ δ e
其中Se为单元的应力函数矩阵:
⎡ E S ( x) = E B ( x) = ⎢ − ⎣ l
e e e
e
E ⎤ ⎥ l ⎦
平面梁单元的节点位移δe和节点力Fe为:
δ =⎡ ⎣ui vi θi u j v j θ j ⎤ ⎦
e e
T
F =⎡ ⎣ FNi FQi M i FNj FQj M j ⎤ ⎦
相应的刚度方程为:
T
K e ⋅δ e = F e
将杆单元刚度矩阵与纯弯梁单元刚度矩阵进行组 合,可得到平面梁单元的刚度矩阵:
可以写出节点位移向量和节点力向量:
δ =⎡ ⎣ui u j ⎤ ⎦
e
e
T
T ⎡ ⎤ F = ⎣ FNi FNj ⎦
(1)单元位移模式的表达 由于每个节点只有一个轴向位移,即一个单元共有 两个自由度,因此可假设该单元的位移模式为具有 两个待定系数的函数模式:
u ( x ) = a 0 + a1 x
e
第三章
杆件结构的有限元分析 (FEA)
在杆件系统中根据单元受力的特点,我们可以 把它们分成两大类:杆和梁。为了以后描述的 方便,我们把两端铰接,只受轴向力的基本结 构称为杆单元,而受轴向力和弯矩、扭矩、剪 力共同作用的基本结构称为梁单元。
3.1 平面杆单元
局部坐标系中的杆单元描述
设有一任意的杆单元如图所示,i 和j 为单元的两 个结点,x 为该单元的局部坐标,其原点设在单 元的i 结点。设两个结点在x 方向的位移为 u i 和 u j ,它们的正方向如图3-1 所示,与它们相应的 结点力 FN δ e
《有限元理论与数值方法》第三讲-杆、梁结构有限元分析
Finite Element Theory and Numerical Method
一、杆、梁的物理力学模型
拉压杆单元如图3-6所示,已知等直杆件杆长为 l 横截面面积为 A 材料弹性模量为 E 所受轴向分布载荷集度为 p(x) 杆端位移分别为 u1 u2
杆端力分别记为 F1 F2
1、建立位移场
F1, u1 xa
1
a p(x)
2 F2 , u2
x
设局部坐标系下杆中任意点a的坐标为 xa
因为只有两个边界条件 u1
形函数具有如下性质: 1)本端为1,它端为0 2)单元内任意一点总和为1
N1(0) 1
N1(1) 0
N2 (0) 0 N2 (1) 1
N1() N2 () 1
2、应变分析
du dx
dN dx
ue
dN1 dx
B为应变矩阵或者几何矩阵。
dN2 dx
u
e
1 l
1 l
ue
[B1
B2 ]ue Bue
图示所示桁架 l 2m
EA 1.2106 kN
试求1-2杆和1-4杆单元的局部坐标单元 刚度矩阵
1-2杆:抗拉刚度 EA / l 6106 kN/m
F1 10N 3
1
F2 20N 4
2
ke1
EA l
1 1
1
1
6
105
1 1
1
1
kN
/
m
1-4杆:抗拉刚度 EA /( 2l) 4.24264 105 kN/m
有限单元法课件第四章 杆件系统的有限元法

(a)
(b)
由杆件组成的结构体系称为杆系,如起重机,桥梁等。
由桁杆组成的杆系称为桁架。
由梁组成的杆系成为刚架。
若杆系和作用力均位于同一平面内,则称为平面桁架 或平面刚架,否则称为空间桁架或空间刚架。
由于杆件结构采用一维单元进行离散,所以杆系的网 格划分容易用半自动方法实现。当采用自动网格划 分方法时,杆系的几何模型是由杆件轴线构成的线框 模型。
R
e P
RiP R jP
R
lP
R
R
e F
RiF R jF
Rlx Rly NlT l R l
lF T l
Px dx (l i, j ) Py
e T
Bj dx
kii k ji
kij k jj
其中矩阵元素为
kst D Bt dx B as 0 EA 0 at 0 0 0 bs dx 0 EI 0 bt ct 0 cs 0 0 EAas at dx 0 EIb b EIb c s t s t EIcs bt EIcs ct 0
e
du dx e x 2 B Bi q x d v dx 2
Bj q
e
其中
ai 0 0 Bi 0 b c i i a j 0 0 Bj 0 b c j j 1 12 6 ai a j bi b j 3 x 2 l l l 4 6 2 6 ci 2 x cj 2 x l l l l
桥梁结构分析的杆系有限元法及结构模型的建立2015
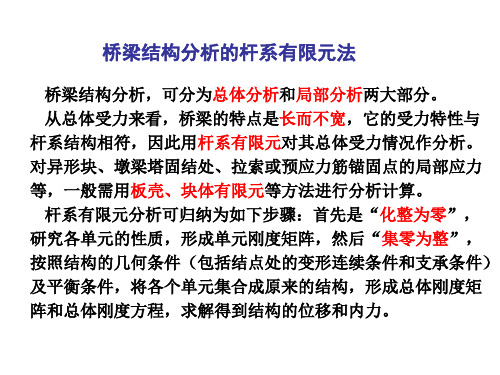
结构的离散化
确定了结构的全部 节点,也就确定了 结构的单元划分, 然后对结构进行单 元编号和节点编号, 通常单元编号用①, ②,……表示,节 点编号用1, 2,……表示,如图 所示。
6 67
5
4
3
5
4
1
2
1
2
3
单元杆端力与杆端位移的表示方法
• 平面桁架单元的局部坐标和整体坐标:
y
y
x
3
x2
2
y
1
结构分析的杆系有限元法
• 概述 • 有限单元法的概念及应用 • 结构的离散化 • 单元杆端力与杆端位移 • 逆步变换 • 单元刚度矩阵 • 总刚度矩阵 • 边界条件的后处理法 • 线性代数方程组的数值解法
结构分析的含义
• 结构分析的含义,不仅指在一定的已知条件下对结构的变 形和内力等进行计算,而且包括分析构件刚度变化对内力 变化的影响,对结构的几何组成进行分析,以及选择合理 的结构形式等等。
结构分析的有限元法
• 美国20世纪70年代推出的至今仍然是世界销售量最大的 NASTRAN(NAsa STRuctural Analysis,美国国家航空和 宇宙航行局结构分析程序系统)程序与当时西德推出的 ASKA(Automatic System for Kinematics Analysis,运动 分析的自动程序系统)齐名,同为当时最为著名和广泛应 用的程序,但几十年后的现在,ASKA已无法与 NASTRAN相比。原因是ASKA后来没有大规模的资金投 入,使程序不断得到滚动发展(维护)和组织推广、剌激 程序在竞争中不断改进各种功能。
向量
X
e i
Yi e
F
e
Fi e Fje
有限单元法 第2章 杆系结构的有限元法分析

义 & 可以进一步求得单元刚度矩阵为 )
( & # 0# ( $’ $ % 8 . ! 1 # $ ’ 0# # 同时 & 我们可以根据式 $ % 求出等 效 结 点 荷 载 矩 阵 ’ 这 里 要 指 出 的 是 ) 分 布 荷 载 ! .$
! # !! !
! # $! !
! 第 ! 章 ! 杆系结构的有限元法分析 # #! ! """""""""""""""""""""""""""""""""""""""""""
不适定的 " 第九步 # 求解方程组 " 计算结构的整体结点位移列阵 ## 并 进一步 计算各 单元 的应力 分量及主应力 $ 主向 " 第十步 # 求单元内力 # 对计算成果进行整理 $ 分析 # 用表格 $ 图线标示出所需的位移 及应力 " 大型商业软件 % 如 )* + , + 等 & 一般都具有强大的后处理功能 # 能够 由计算 机自 动绘制彩色云图 # 制作图线 $ 表格乃至动画显示 "
矩阵 ’ $ %进行应力 ( 应变分析 ’ 根据材料力学中应变的定义 & 有 ) ! # # $’ 2 + 2 $ ( ( ( ( $’ $’ $’ . 0 ! ! . " 3 3 .% ". . ! ! ! !! "# ’ ’ 2 # 2 #
杆梁结构的有限元分析原理
杆梁结构的有限元分析原理杆梁结构是一种常见的工程结构,广泛用于建筑、桥梁、机械等领域。
为了研究杆梁结构的力学性能和设计优化,常用的方法之一是有限元分析。
有限元分析是一种数值计算方法,通过将连续结构离散化为一个个有限的单元(元素),再通过计算单元之间的相互作用来近似表示整个结构的力学性能。
下面将逐步介绍杆梁结构的有限元分析原理。
1.离散化:首先,将杆梁结构离散化为一个个的单元,通常可以选择线性单元、二次单元等。
线性单元简单且计算效率高,而二次单元更准确但计算开销较大。
根据具体工程需求和分析要求,选择合适的单元进行离散化。
每个单元由节点和单元梁组成。
2.建立本地坐标系:为了方便计算,对于每个单元,可建立本地坐标系。
本地坐标系是以单元的一个节点为原点,并建立与该节点有关的坐标轴。
通过本地坐标系可以方便地描述单元内部的各种力和力矩。
3.单元刚度矩阵计算:对于每个单元,需要计算其刚度矩阵。
刚度矩阵描述了单元内部的相互作用,包括节点间的弯曲刚度和剪切刚度等。
通过根据材料的力学特性和几何信息,可以得到单元刚度矩阵。
4.装配全局刚度矩阵:将所有单元的刚度矩阵按照它们的几何关系组装成全局刚度矩阵。
全局刚度矩阵描述了整个杆梁结构的力学行为。
5.施加边界条件和加载情况:根据具体问题的边界条件和加载情况,在全局刚度矩阵中添加与之对应的约束和加载项。
边界条件通常涉及到约束的位移和力的平衡,加载情况则涉及到外界施加在结构上的力。
6.求解杆梁结构的位移:通过求解全局刚度矩阵与位移的乘积等式,可以得到结构的位移。
位移是描述结构变形的重要参数,可以用来计算应力、应变和变形等。
7.计算应力和应变:通过已知的位移以及杆梁的几何信息,可以计算单元内部的应力和应变。
应力和应变是评估杆梁结构受力情况的重要指标,在结构设计和安全评估中具有重要作用。
8.结果后处理:最后,可以通过后处理技术对有限元分析的结果进行处理和展示。
例如,可以绘制位移云图、应力云图等,以方便工程师对结构的力学性能进行评估和优化。
第3讲、杆梁问题的有限单元法
M yi
MT zi
(d)
单元刚度方程为
K e e Fe
(e)
其中:单元刚度矩阵
k1,1
K e
k2,1
k12,1
k1,2 k2,2
k12,2
k1,12
k2,12
k12,12
(f)
单元刚度矩阵元素根据其物理意义分析如下:
⑴ ui 1,其他结点自由度方向位移为0(如图32),生成单元刚度矩阵的第一列元素。
同样
vi ui cos y, x vi cos y, y i cos y, z i ui cos z, x vi cos z, y i cos z, z
图13
图14
这种转换关系如图14所示,写成矩阵形式,即
ui
vi
cos c os
x, y,
x x
i cos z, x
l32 m32 n32
由于 l1, m1, n1,l2, m2, n2 ,l3, m3, n3 实际上是用整体
坐标表示的沿局部坐标系三个坐标轴方向的三个单
位矢量,它们两两相互垂直,由矢量数量积的性质
可知
1 0 0
t t 0 1 0 I
0 0 1
则
t t t t 1
故 t 为正交矩阵。显然,由此又可得出转换矩阵T
0
0 1
则单元的坐标转换矩阵
T
t0
0
0
t0
显然也是正交矩阵。
也为正交矩阵的结论:
T T 1
(3-15)
则(3-11)式成为
K e T T KeT
(3-16)
⑵平面杆单元的坐标转换矩阵
先考察结点线位移的坐标转换,由 ui vi 转换
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§2.2.1 等截面杆单元
轴向拉压变形模式下,该杆单元的行为与弹簧单元相同,因 此杆单元的刚度矩阵为:
EA k L
比照弹簧元的刚度方程,写出杆单元的刚度方程为:
fi k f j k
k ui EA 1 1 ui k u j L 1 1 u j
k ui k u j
f kd
第二章
——弹簧单元刚度方程,单元特性
杆和梁结构的有限元法
§2.1.1 弹簧单元分析
上式中:
k 弹簧单元的刚度矩阵 d 单元节点位移向量 f 单元节点力向量
思考问题: 1)k 有什么特点? 2)k 中元素代表什么含义? 3)上面方程可以求解吗?为什么?
T d f d B EBdV d V
T T
考虑到 d 的任意性,立刻得到:
T f B EBdV d k d V
k BT EBdV
V
——杆单元刚度矩阵
这就是刚度矩阵的一般形式,可推广到其他类型的单元。
第二章 杆和梁结构的有限元法
fi k f j k
第二章
k ui k u j
f kd
杆和梁结构的有限元法
2、弹簧系统的集成 1)列节点平衡方程法
F1 f11 F2 f 21 f12 F3 f 22
系统节点 平衡条件
F1 k1u1 k1u2 F2 k1u1 ( k1 k2 )u2 k2u3 F3 k2u2 k2u3
第二章 杆和梁结构的有限元法
§2.1.2 弹簧系统分析
方法2:单元刚度方程扩大叠加 a.将单元刚度方程扩大到整体规模:
元素按总体 节点序号重 新排列,对 号入座。
要点:1、单元刚度方程扩大规模并不改变其表达的力学关系。
2、扩大后的单元刚度方程采用整体节点位移列阵。 3、扩大后的方程中矩阵元素按对应的整体节点序号排列!
第二章 杆和梁结构的有限元法
k k k
k k
fi k f j k
k ui k u j
kii k k ji
kij k jj
§2.1.2 弹簧系统分析
求解一个弹簧系统:
1)各单元的特性分别为:
第二章 杆和梁结构的有限元法
F 2 k2 2 k2 (u3 u2 )
(拉力)
§2.1.2 弹簧系统分析
练习1:
对图示弹簧系统,求其总刚度矩阵
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
要点回顾
1、弹簧单元刚度方程的建立 弹簧变形平衡
f i F k (u j ui ) kui ku j f j F k (u j ui ) kui ku j
如何用直接法求杆单元特性? 如何用公式法导出杆单元特性?
2.2.2 二维空间 杆单元
什么叫坐标变换?
如何对节点位移向量进行坐标变换?
什么是虚功原理? 杆单元刚度矩阵的特点?
如何对刚度矩阵进行坐标变换? 应用举例——二维桁架
第二章
杆和梁结构的有限元法
§2.2.1 等截面杆单元
研究一个2节点一维等截面杆单元:
§2.1.1 弹簧单元分析
方法一: 考虑弹簧力学特性和节点上力平衡有:
Hale Waihona Puke f i F k (u j ui ) kui ku j
f j F k (u j ui ) kui ku j
写成矩阵形式:
fi k f j k
矩阵符号形式:
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
2)按两种方法装配系统特性: 方法1:按节点列平衡方程
分别考虑节点1,2,3的力平衡
条件(总节点力与节点外载荷的平衡): F1 f11
F2 f 21 f12 F3 f 22
把单元特性代入,得到: F1 k1u1 k1u2
F2 k1u1 (k1 k 2 )u2 k 2u3 F3 k 2u2 k 2u3
式中N N i
N j , 称为单元形函数矩阵。
注意:位移模式采用一次多项式是因为单元只有2个轴向位 移分量, 只能对应2个多项式系数。
第二章
杆和梁结构的有限元法
§2.2.1 等截面杆单元
d 单元应变: du Nd B d dx dx
u N i B ——单元应变矩阵 d B Ni ( x) N j ( x) 1/ L 1/ L dx ui N j Nd u j
(c) 节点1、4的反力
(d) 弹簧2中的力
第二章 杆和梁结构的有限元法
§2.1.2 弹簧系统分析
解:
(a)各单元的刚度矩阵为:
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
应用前面的叠加方法,直接得到弹簧系统的总刚度矩阵:
或
总刚度矩阵特征:对称、奇异、带状、稀疏
第二章 杆和梁结构的有限元法
单元特性
系统平衡方程
第二章 杆和梁结构的有限元法
KD F
2)单元方程扩大相加法 单元特性
F1 f11
相加
F2 f 21 f12 F3 f 22
系统节点 平衡条件
引入系统节点平衡条件
KD F
系统节点平衡方程
第二章 杆和梁结构的有限元法
2.2 杆单元和平面桁架
杆单元
2.2.1 一维等截面 杆单元
L— 杆长
A— 截面积
E— 弹性模量
ui 单元节点位移:d u j
fi 单元节点力:f fj
第二章 杆和梁结构的有限元法
§2.2.1 等截面杆单元
u u ( x)
——杆单元位移
( x) ——杆单元应变 ( x)——杆单元应力
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
注意: 上述弹簧系统的分析求解原理和过程就是有限元 法求解连续体力学问题时对离散后系统的分析求 解原理和过程。
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
例题1:弹簧系统
已知条件:
求:(a) 系统总刚度矩阵 (b) 节点2,3的位移
du 应变—位移关系: dx 应力—应变关系: E
第二章
杆和梁结构的有限元法
§2.2.1 等截面杆单元
(一)直接法导出单元特性 杆单元伸长量: u j ui
杆应变: L
E 杆应力: E L EA EA 杆内力: F A k L L EA 杆的轴向刚度: k L
第二章 杆和梁结构的有限元法
§2.1.2 弹簧系统分析
b. 将上面的矩阵方程叠加,得到:
系统总节点力(内力) 与节点位移的关系—— 系统特性。
c. 代入节点平衡条件, 得系统节点平衡方程:
F1 f11 F2 f f
1 2 2 1
F3 f 22
注意:总刚度矩阵就是 单元刚度矩阵扩大后的 叠加!
第2章 杆和梁结构的有限元法
2.1 2.2
弹簧单元和弹簧系统 杆单元和平面桁架
2.3
梁单元和平面刚架
第二章
杆和梁结构的有限元法
2.1 弹簧单元和弹簧系统
1 2
一个弹簧单元 的分析
弹簧系统
什么是单元特性? 弹簧单元的刚度矩阵 弹簧单元的刚度方程 弹簧单元刚度矩阵的特点
第二章 杆和梁结构的有限元法
弹簧系统的总刚度矩阵 如何求解系统的平衡方程 例题
单元应力: E EBd 下面应用弹性体虚功原理导出单元刚度方程。
第二章
杆和梁结构的有限元法
§2.2.1 等截面杆单元
虚位移原理 弹性体受力平衡时,若发生虚位移,则外力虚功等于弹
性体内的虚应变能。——平衡条件
对于杆单元,定义虚位移如下: ui 节点虚位移: d u j 单元虚位移: u Nd
第二章 杆和梁结构的有限元法
§2.1.2 弹簧系统分析
3) 给定载荷和约束条件下的求解 设边界条件为:
u1 0 F2 F3 P
则系统平衡方程为:
第二章
杆和梁结构的有限元法
§2.1.2 弹簧系统分析
该方程展开后分为2个部分: 未知量为2个节点位移 u2 , u3 和一个支反力 F1
解上面方程得:
第二章
杆和梁结构的有限元法
§2.2.1 等截面杆单元
(二)公式法导出杆单元特性方程(虚功原理)
单元上假设近似位移函数——位移模式
单元上位移假设为线性多项式函数: u a0 a1 x 用插值法把多项式中的待定系数 a0 , a1 转化为待定节点位 移ui,uj,从而得到插值形式的假设位移函数——单元位移模 式如下: u( x ) N i ( x )ui N j ( x )u j 上式中:
N i ( x) 1
x , L
N j ( x)
x L
N i , N j 是插值基函数,有限元中称为形状函数,简称形函数。
第二章 杆和梁结构的有限元法
§2.2.1 等截面杆单元
单元位移模式写成矩阵形式:
u Ni
ui N j Nd u j
u( x ) N i ( x )ui N j ( x )u j
§2.1.1 弹簧单元分析
弹簧是宏观力学特性最简单的弹性元件。下面以平衡弹簧系统中 一个弹簧单元为研究对象进行分析。