第一章-6 飞行动力学-飞机的横侧运动+飞机方程
飞机运动的动力学、弹道学和控制
飞机运动的动力学、弹道学和控制1. 飞机运动的动力学
1.1 飞机的六度自由运动
- 平动运动:沿x、y、z三个坐标轴的平动
- 转动运动:绕x、y、z三个坐标轴的转动
1.2 飞机的空气动力学
- 升力原理
- 阻力原理
- 机动力学方程
2. 飞机的弹道学
2.1 弹道运动的基本概念
- 初始条件
- 空气阻力
- 重力加速度
2.2 弹道方程
- 二维平面弹道方程
- 三维空间弹道方程
2.3 弹道修正
- 风阻修正
- 重力修正
3. 飞机的控制
3.1 飞机的控制面
- 升降舵
- 方向舵
- 副翼
3.2 飞行控制系统
- 自动驾驶仪
- 飞行控制计算机
- actuators
3.3 控制律设计
- PID控制
- 最优控制
- 自适应控制
本文概述了飞机运动的动力学、弹道学和控制的基本理论和方法。
动力学部分介绍了飞机六度自由运动和空气动力学原理;弹道学部分阐述了弹道运动基本概念、弹道方程及修正方法;控制部分则涉及飞机控制面、飞行控制系统和控制律设计等内容。
这为深入研究飞机运动及其控制奠定了基础。
飞行动力学飞机方程
xydm Ixy
表示惯性积
依据假设 Ixy=Izy=0 ,H 的各分量
H
x
H y
pI x qI y
rI xz
代入
dH dt
1H
dH dt
H
H x dt
pI x rI xz
dH y dt
qI y
dH z dt
rI z pI xz
由于
i jk
H p q r i(qH z rH y ) j(rH x pH z ) k ( pH y qH x )
1.地轴系与机体轴系间的方向余弦表
o
xg
x
cos cos
y
cos sin sin- sincos
z
cos sin cos+sinsin-
yg sincos sin sin sin+cos cos sin sin cos-cos sin
zg -sin cos sin cos cos
表中,oxyz为机体轴系, oxgygzg为地轴系
—动坐标系对惯性系的总角速度向量
—表示叉积,向量积
1H —沿动量矩 H 的单位向量
dV , dH dt dt
—对动坐标系的相对导数
1.力方程
F
m
dV dt
dV dt
1V
dV dt
V
V 和 用机体坐标系上的分量(u,v,w;p,q,r)表示
V iu jv kw, ip jq kr
三个力方程 三个力矩方程 飞机六自由 度动力学
线性方程 增量方程
m
d u dt
( X u
)0 u
( X
)0
( X
)0
m
飞行力学第1-6章弹性

南京航空航天大学空气动力学系
一方面,现代大型飞行器具有较低的弹性振动固 有频率,往往处于控制系统的正常工作频率之内, 控制力可能激励结构弹性模态; 另一方面,反馈稳定系统受到弹性变形的干扰, 测量元件不仅感受到飞行器受干扰后的运动参数 变化,同时也将结构变形作为附加的反馈信号引 入到回路中。 飞机的结构弹性对其运动特性存在影响,一般 从两个方面进行分析: 静弹性变形对飞机本体稳定性和操纵性的影响; 结构弹性振动对“飞机-操纵系统”运动稳定性的影 响
Ix I xy I xz
I xy Iy I yz
I xz x I yz y Iz z
南京航空航天大学空气动力学系
简化处理
将绕飞机质心的动量和动量矩方程与 n-1 个弹性质点的 内力平衡方程联立求解比较困难。在工程实践中常在弹 性质点的内力平衡方程组中,忽略气动力与弹性变形的 相互作用,即认为飞机结构在基准运动的平衡状态下, 受外扰动后作自由振动。 除了飞机质心的动量和动量矩方程外,其它以广义坐标 表示的内力平衡方程就简化为矩阵形式:
Ix I xy I xz I xy Iy I yz x I xz y I yz z Iz
ss
v x v y vz
C
M x x M y y Mz z
南京航空航天大学空气动力学系
一、静弹性变形的影响
考虑静弹性变形影响的基本原理是,根据结构力学中 所谓准静弹性假设,即认为飞机结构刚度较大,弹性变形 的自振频率远大于受扰运动频率。因此,在扰动运动,由 于运动参数变化引起的载荷变化,立即产生相应的变形, 使得飞机结构处于准平衡状态。 而飞机结构变形,使得作用在飞机上的空气动力将与刚 体飞机有所不同,从而对飞机稳定性和操纵性产生影响。 此时,为了确定弹性变形对飞机稳定性和操纵性的影响, 首先需要对各种定常飞行状态(重量、法向过载、马赫数、 速度等)下飞机结构的静弹性变形进行分析,确定相应的 变形和由此引发的气动力特性的变化。再根据新的气动力 特性进行相关的飞机稳定性与操纵性分析。一般采用修正 因子确定结构弹性变形后的气动力导数,即
飞行动力学-飞机飞行性能计算

12
H / km
10
8
6
4
2
0 0 2 4 6 8 10 12
P / kN
可用推力Pky
• 发动机安装在飞机上会带来推力损失
Pky=hP
• 通常最大状态或加力状态的推力对性能计算比较重要, 所以可用推力一般是指发动机(一台或多台)安装在 飞机上之后,其最大推力或全加力推力 • 不同高度下,可用推力随M数变化的曲线称为可用推 力曲线
0.8 0.6 0.4 0.2 0.0 0.00
低 速 时 极 曲 线 变 化 不 大
Cy
0.02
0.04
0.06
0.08
0.10
0.12
Cx
零升阻力系数
0.04
0.03
Cx0
0.02
0.01
0.00 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
M
升致阻力因子
0.4
0.3
A
0.2
0.1
0.0 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
M
升阻比K
升阻比:
K
Cy Cx
Cy
最大升阻比Kmax对应的 Cy称为有利升力系数Cyyl
Cyyl
Cx
最大升阻比Kmax
1 Cx Cx 0 ACy K Cy Cy d Cx Cx 0 ( ) 2 A0 dCy C y Cy
飞机的最大最小飞行速度飞机的升限上升率加减速时间给定高度的航程?通常比较飞机的极限飞行能力计算分析本课程的主要内容?飞机性能计算的原始数据气动推力重力?飞机的基本飞行性能定常直线飞行的高度速度上升率等?飞机的续航性能最大飞行时间和距离?飞机的机动飞行性能转弯筋斗等?飞机的起飞和着陆性能起飞着陆距离时间?飞机的任务性能飞行剖面第一章飞机飞行性能计算所需的原始数据飞行过程中的受力分析及角度定义一p发动机推力y升力q阻力g重力jfd发动机安装角a迎角q航迹倾角j俯仰角v飞行速度水平线qaygqpvjfdj发动机发动机安装角3?2?机身轴线发动机轴线发动机尾喷口轴线相对于发动机轴有5夹角定直平飞的受力分析水平线aygqpvx定常直线水平飞行受力分析及角度定义二p发动机推力z侧力q阻力b侧滑角y偏航角ys航向角v飞行速度v北b?qzp?s受力分析及角度定义三ygz?y升力z侧力g重力?滚转角重力g?重力大小
飞机运动方程

刚体飞机运动方程
基本假设 飞行器是刚体,质量为常数(非必要条件); 假设地球不动,地面坐标系为惯性坐标系; 忽略地球曲率,认为地面为平面; 重力加速度为常数,不随高度变化; 机体坐标系平面为飞机对称平面,飞机几何外形对 称,质量分布也对称,惯性积满足 I = ∫ xydm = 0 , I zy = ∫ zydm = 0
牵连运动的加速度合成定理
G r = x i + yj + z k 点在动系中的矢量为
则
其中 i, j,k 分别是动系各轴上的单位矢量,如果从动系中观察,它们都 是常矢量,其导数为零。则( 1)式为 G
dr i + y j + z k =x dt
G dr d (1) i + y j + z k + x = ( xi + yj + zk ) = x i + y j + zk dt dt
Iy , I xz , I z的时间导数为零。 假定飞行器的质量不会移动,质量不变,则 I x, ~ ~ ~ d d d I x − r I xz Hx = p I y Hy = q I z − p I xz Hz = r dt dt dt
j q Hy k r Hz
i G G 展开 Ω × H = p Hx
,
表示矢量 r
G
d 在动系中的导数,称为相对矢导数,导数符号记为 dt 。
G
i, j,k 都是变矢量,当动系以角速度转动时,利 如果从惯性坐标系观察,
= x(ω × i ) + y (ω × j) + z (ω × k )+ = ω × r 用泊桑公式有 x i + y j + zk G G G d r dr = +ω ×r 则 dt dt G 此为矢量 r 在惯性坐标系中的导数,称为绝对矢导数。
飞行力学第六章-运动方程

解出
dV / dt , dα / dt , dβ / dt
飞行器飞行力学2010
在α、β 不大的快速机动中,可近似认为速度不 变,且
u ≈ V = const v ≈ Vβ w ≈ Vα
从而有
T cos Z b g dα = q pβ + cos φ cos θ dt mV V Yb dβ g = pα r + + sin φ cos θ dt mV V
3、重力
2、气动力
Ax D C Ay = Az L a
W x 0 0 Wy = m W z g g
飞行器飞行力学2010
航迹 轴系 χ, γ 矢量形式方程组 地面 轴系
μ (无风时)
气流 轴系 α,β 机体 轴系
ψ,θ,φ
v v v dVb δVb v = + ω b × Vb δt dt v v v = Tb + Lba Aa + Lbg W g
飞行器飞行力学2010
标量形式方程组
du m ( + qw rv ) = T cos D cos α cos β dt C cos α sin β + L sin α mg sin θ dv m ( + ru pw ) = D sin β + C cos β + mg sin φ cos θ dt dw m( + pv qu) = T sin D sin α cos β dt C sin α sin β L cos α + mg I x ω x I xy
0 I zx
I xy Iy I yz
I zx ω x M x I yz ω y = M y I z ω z M z
飞行动力学飞机方程
设方向余弦表为矩阵Mbg,用欧拉角描述:
体轴坐标与地轴坐标可以互相转换
Mbg是复共轭矩阵:
x
y
M bg
xg
yg
z
zg
M 1 bg
MbTg
姿态角变化率与角速度分量间的几何关系
地轴系 Oxgyg平面
飞机三个姿态角变化率的方位
—沿ozg轴的向量,向下为正
—在水平面内与ox轴在水平面上的
u vw
F 按各轴分解,表示为: F iX jY kZ
各轴分量:
X m u wq vr
Y
m v ur
wp
Z
m
w
vp
uq
飞机的力方程
2.力矩方程
M
dH dt
dH dH dt 1H dt H
先考虑第一项
H 是动量矩,单元质量dm因角速度引起的动量矩为
dH r ( r )dm
式中:r 为质心至单元质量dm 的向径。
对飞行器的全部质量积分,可得总的动量矩 H r ( r )dm
式中: r ix jy kz, ip jq kr
依据:
i jk r p q r i(qz r y) j(r x pz) k( p y xq)
xyz
i r ( r ) x
xydm Ixy
表示惯性积
依据假设 Ixy=Izy=0 ,H 的各分量
H
x
H y
pI x qI y
rI xz
代入
dH dt
1H
dH dt
H
H
z
rI z
pI xz
可得
dH x dt
pI x rI xz
dH y dt
qI y
飞行器运动方程

假定飞机有一个对称面xoz(机体坐标系),且飞 行器不仅几何外形对称,而且内部质量分布亦对 称,惯性积
I xy I zy O
;
忽略地面曲率,视地面为平面;
二、 六自由度飞机运动方程
1、飞机运动的自由度:(six-degrees-of freedom)
飞机在空间的运动有六个自由度,即质心沿地 面坐标系的三个移动自由度和绕机体坐标轴系 的三个转动自由度 。
x1 0 sin x1 1 0 y1 C y 1 z g 0 cos z g 得到 xyz 最后绕 ox 轴转
0 0 x x 1 x y 0 cos sin y C y 1 z z 0 sin cos z2
0 求 与 p,q,r 的关系。再将 加上可得: ,
0 0 cos 0 sin 0 p 1 q 0 cos sin 0 1 0 0 0 r 0 sin cos sin 0 cos
dV dV 1V V dt dt
dL dL 1H L dt dt
1、牵连运动
1V :沿 V 的单位向量;
:动坐标系对惯性系的总角速度向量;
1L :沿动量矩 L的单位向量; :表示叉乘 v 是牵连加速度。
dV dt
dV dt
和
dH dt
dH dt
:表示在动坐标系内的相对导数。
一、动力学方程式
动力学方程式是描述飞机所受力、力矩与飞机运 动参数间关系的方程,显然包括两组方程:
空气动力学基础与飞行原理:飞机横侧向动稳定性

2022/3/17
18
3 荷兰滚模态
•荷兰滚是频率较快(周期为几秒)的中等阻尼的横 向一航向组合振荡模态。在荷兰滚模态运动中,飞 机的侧滑角、滚转角和偏航角的量级相同,而滚转、 偏航运动的速度较小。各运动参数都随时间按振荡 方式周期变化,形成飞机一面来回滚转,一面左右 偏航,同时带有侧滑的振荡运动,即荷兰滚运动
飞机的侧向稳定性过强而方向稳定性过弱,易产生 荷兰滚。
飞机受扰左倾斜→左侧滑,横侧稳定性强 →飞机迅速改平坡度;方向稳定性弱→飞机左偏 的速度慢,未等左侧滑消除,飞机又带右坡度→ 右侧滑。
2022/3/17
21
当发生荷兰滚不稳定时,由于振荡频率较高、周期 较短,飞机会以逐渐增大的振幅迅速左右摇晃。驾 驶员对这种高频率振荡很难加以控制,所以荷兰滚 模态不稳定会影响飞行安全 和飞行任务的完成,在 三种模态中最受重视。
2 交叉力矩
交叉力矩:由滚转运动引起的偏航力矩 和由偏航运动引起的滚转力矩。
➢ 滚转引起的交叉偏航力矩 ➢ 偏航引起的交叉滚转力矩
➢ 滚转引起的交叉偏航力矩
当飞机绕纵轴转动向右横滚时 左右机翼迎角变化 垂直尾翼产生气动力 产生使机头向右偏转的偏航力矩。
➢ 偏航引起的交叉滚转力矩
当飞机绕立轴向左偏航时, • 垂尾产生指向左侧的气动力 • 左右机翼气流相对速度不同 产生使飞机绕纵轴向左横滚的滚转力矩
•扰动消失后,飞机在恢复原飞行姿态而产生的扰动运 动中受到静稳定力矩、惯性力矩、气动阻尼力矩和交 叉力矩的共同作用,扰动运动的情况就和影响这些力 矩的各种因素有关。
• 注意:交叉力矩总是与飞机回复原飞行姿态的静稳定力 矩方向相反,起到减小静稳定力矩的作用,对飞机运动 的稳定性不利
二、横侧向扰动运动的三种模态及特性
飞行动力学(第五、六节)

全机滚转角速度p
引起的偏舵力矩 式中:
交叉动导数
无因次滚转角速度
偏航力矩N,正负不定
5.偏航角速度r引起的N—航向阻尼力矩
航向阻尼力矩,与纵向、滚转阻尼力矩原理相同。航向阻尼 力矩主要由立尾产生,机身也有一定的作用。
r0时,前行翼的相对空速增大,阻力增大,
后退翼的相对空速减小,阻力减小,
产生的力矩与r的方向相反,故为阻尼力矩
交叉动导数
式中:
交叉动导数 无因次偏航角速度
三、绕oz轴的偏航力矩N
1.侧滑角引起的N — 航向静稳定力矩
0,立尾上有侧力N ,产生正偏航力矩
机身有不稳定偏航力矩; 箭形机翼产生正偏航力矩,起稳定作用; 超音速飞机头部有侧力,产生不稳定的偏航力矩;
侧滑角产生的偏航力矩N:
式中;
航向静稳定导数
方向舵正向偏转(方向舵后缘向左偏转)时,产生正的 侧力。由于方向舵在机身之上,此侧力对ox轴取矩得 正的滚转力矩。可写为
式中:
操纵交叉导数
4.滚转角速度p引起的L——滚转阻尼力矩
滚转阻尼力矩主要由机翼产生,平尾和立尾也有影响
当飞机左滚时p为负,左翼下行,右翼上行。下行翼迎
角增加故升力增加,上行翼迎角减小故升力减小,形 成正滚转力矩L(右滚),起到了阻止滚转的作用,称 为滚转阻尼力矩。 平尾及立尾的作用原理与机翼相同, 都是阻止滚转,只是作用小于机翼 滚转阻尼力矩可写为
铰链故障会直接造成飞行控制失控
第五节内容
侧滑产生侧力 侧向变量:状态量,操纵量 所有侧向变量都产生滚转和偏航力矩 描述公式,各气动导数定义
滚转静稳定性,滚转静稳定导数CL <0 航向静稳定性,航向静稳定导数Cn >0
飞机的横侧向运动原理
飞机的横侧向运动原理飞机的横侧向运动原理主要涉及到飞机的侧滚和定向稳定性。
在飞行中,飞机需要进行侧滚和偏航姿态的调整,以保持平稳的飞行状态。
下面将从以下几个方面来详细解释飞机的横侧向运动原理。
1. 侧滚的原理飞机的侧滚是指飞机围绕其纵轴进行的旋转运动。
侧滚的发生是由于飞机受到空气动力学力的作用,在一侧机翼产生的升力大于另一侧机翼时,飞机会发生侧滚。
产生侧滚的主要原因是飞机的侧向不平衡力矩,导致飞机向一侧倾斜。
飞机的侧向不平衡力矩主要来自于下列四个力矩的不平衡:(1) 侧向力矩:当飞机的重心不在对称线上时,产生了由于重力而引起的侧向力矩。
(2) 拖曳力矩:当飞机的发动机串扰产生的推力与空气动力阻力不平衡时,会产生拖曳力矩,引起飞机侧向不平衡。
(3) 抗扰力矩:飞机受到气流等外力的扰动时,会产生向往复位的抗扰力矩,也会引起侧向不平衡。
(4) 增升系统力矩:用于操纵飞机的增升系统的操作也会引起飞机侧向不平衡。
为了抵消这些侧向不平衡力矩,飞机上通常设置了侧滚控制系统,用于产生合适的侧滚力矩,以使飞机保持平稳。
常见的侧滚控制系统包括副翼和风切面设备。
2. 定向稳定性的原理飞机的定向稳定性是指飞机在飞行过程中保持方向稳定的能力。
当飞机发生侧风或横侧失速等情况时,定向稳定性的良好能够使飞机迅速恢复稳定飞行。
定向稳定性的产生主要涉及到飞机的竖尾和侧滑角。
竖尾是飞机上用于控制飞机方向的主要部件,它能够产生侧向力矩,使飞机保持方向的稳定性。
当飞机向一侧受到侧风的作用时,竖尾产生的侧向力矩会使飞机产生侧滑角,从而使飞机重新对齐飞行方向。
除了竖尾外,还有一些辅助设备用于提高飞机的定向稳定性。
比如风向标和侧滑提示器等,这些设备能够向飞行员提供当前飞机的侧滑程度,以便飞行员进行相应的调整来保持定向稳定性。
此外,飞机的横侧向运动还受到飞行员的操纵操作的影响。
飞行员可以通过操纵副翼、脚蹬和方向舵等控制飞机的侧滚和定向稳定性。
飞行员需要根据飞机的动力学特性以及飞行情况进行相应的调整,以保持飞机的平稳运动。
空气动力学基础与飞行原理:飞机横侧向操纵

主要内容
•一、飞机的侧向操纵 •二、飞机的方向操纵
一、飞机的侧向操纵
1 偏转副翼对飞机进行侧向操纵 2 偏转副翼引起的有害偏航 3 副翼操纵的失效和反逆问题 4 提高飞机侧向操纵效率的措施
1 偏转副翼对飞机进行侧向操纵
对飞机的侧向操纵是通过偏转副翼来完成的。副翼
是指安装在机翼后缘转轴上的小操纵面。副翼的偏
提高副翼反逆临界速度的措施
①提高机翼的抗扭刚度
机翼的扭转刚度越大,扭转角越小,副翼反逆 临界速度也就越高。要求副翼反逆临界速度大 于最大允许速度。
在飞机使用维修中,则应注意不能使机翼受到 损伤,以致降低机翼的扭转刚度。比如,机翼 蒙皮上的疲劳裂纹、蒙皮腐蚀损伤、碰撞造成 的外形凹 陷等,都应在维修中及时发现,并进 行排除和修理
差动副翼
为了克服有害偏航,可 釆用差动副翼。
差动副翼是指对于驾驶杆的 同一行程,副翼上偏角度大 于下偏角度的副翼,如图所 示。这种副翼是通过在副翼 上偏一侧机翼上产生较大的 废阻力,去平衡另一侧机翼 上的过大的诱导阻力,来消 除有害偏航。
弗来兹(Frise)副翼
将副翼的转轴由副翼的 前缘向后移,并安排在 副翼的下表面。
副翼上下偏转角度是相等的 副翼向下偏转时,即使达到最大偏转角,副翼的前缘也不 会露出机翼的上表面; 而当副翼向上偏转时,即使偏转 很小的角度,副翼的前缘也会露出机翼的下表面,产生较 大的废 阻力,去平衡副翼下偏一侧较大的诱导阻力,消 除副翼偏转产生的有害偏航
1.为克服有害偏航所采用的副翼是( )【多选】
目前一些大型民用运输机的布局
飞行时,地面扰流板锁定, 飞行扰流板辅助副翼完成对飞机侧向操纵; 着陆时,机轮一接触地,地面扰流板开锁,飞机两侧机翼上的所有扰流板全部打开, 减升增阻,缩短飞机着陆滑跑距离
飞机横航向平衡和静稳定性和操操纵
翼身干扰
结论与分析
➢机身作用
C y 0, Cl 0, Cn 0 — 机身为航向静不稳部件 (正常重心情况)
➢机翼后掠作用
0:
C y 0 Cl 0, Cn 0 机翼后掠产生横向和航向静稳定作用。 但后掠角一般由升阻要求决定。
➢翼端的作用
机翼迎风一侧的直边缘变成了前缘, 另一侧变成了后缘。 迎风直边缘上部存在侧缘吸力, 升力增加。
侧滑
侧滑角:飞行速度矢量和纵
向对称面的夹角:β;
当Vy为正时,侧滑角为正。
即右侧滑为正。
V
s
in
V =
y
V
图:飞机着陆的侧滑飞行
• 绕OX轴的运动称为横向运动或滚转运动; • 绕Z轴的运动称为航向运动 • 凡出现侧滑、横向或航向运动这三者之一,或其组
合统称为横侧运动。 • 典型的横侧运动:
-定常直线侧滑飞行 -定常曲线飞行
本节内容
1、横侧向运动的定义 2、典型的横侧向运动时飞机上的横侧向气动力和
力矩(定常直线侧滑和定常盘旋) 3、横航向静稳定性及横航向静稳定导数 4、如何操纵飞机实现横侧力与力矩的平衡
飞机横侧运动的基本概念
非对称的飞行运动,称为横侧运动,或横航向运动。
• 横向运动(滚转运动); • 航向运动; • 侧滑; • 三者之一或其组合统称为横侧运动。
• 定常侧滑直线飞行中,飞机上同时作用有侧力、滚转力矩 和偏航力矩。
• 偏航力矩和滚转力矩随β的变化规律,可以通过吹风实验 得出,或者采用工程估算求得。
1定常直线侧滑飞行,作用在飞机上的侧力、横侧力矩
定常侧滑直线飞行中,飞机上同时作用有侧 力、滚转力矩和偏航力矩,力和力矩系数与 β成线性关系。
第一章-4 飞行动力学-飞机方程

& & & ipjqkr
上式表明,飞机三个姿态角变化率或绕机体轴的三个角速度分量都能合成 飞机总角速度向量。一般情况下有 & 与 & , & 与 & 互相垂直,但 & 与 & 不互相垂直。只有 & 0 时, & 与 & 才互相垂直。
x&d
V
y&d
M
ga
0
,
z&d
0
式中,Mg—气流坐标系到地坐标系的转换矩阵
三、飞行器的运动学方程(续)
为了描述飞行器相对于地面的运动,需建立机体轴系与地 轴系之间的转换关系。
1.地轴系与机体轴系间的方向余弦表
o
xg
x
cos cos
y
cos sin sin- sincos
z
cos sin cos+sinsin-
yg sincos sin sin sin+cos cos sin sin cos-cos sin
zg -sin cos sin cos cos
表中,oxyz为机体轴系, oxgygzg为地轴系
设方向余弦表为矩阵Mbg,用欧拉角描述:
体轴坐标与地轴坐标可以互相转换
Mbg是复共轭矩阵:
x
y
式中:i, j, k分别表示沿机体轴ox, oy,oz的单位向量。
于是
1v
d% Vid% ujd% vkd% w dt dt dt dt
令 u & d % u /d t,v & d % v /d t,w & d % w /d t
可得
1v
d%V dt
无人机的侧向动力学微分方程
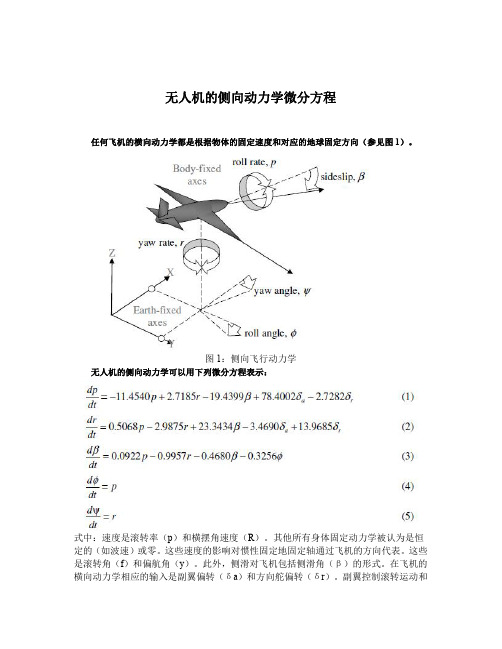
无人机的侧向动力学微分方程任何飞机的横向动力学都是根据物体的固定速度和对应的地球固定方向(参见图1)。
图1:侧向飞行动力学无人机的侧向动力学可以用下列微分方程表示:式中:速度是滚转率(p)和横摆角速度(R)。
其他所有身体固定动力学被认为是恒定的(如波速)或零。
这些速度的影响对惯性固定地固定轴通过飞机的方向代表。
这些是滚转角(f)和偏航角(y)。
此外,侧滑对飞机包括侧滑角(β)的形式。
在飞机的横向动力学相应的输入是副翼偏转(δa)和方向舵偏转(δr)。
副翼控制滚转运动和方向舵控制航向或航向。
这里的平移速度是以m/s,旋转速度在拉德/s和角的弧度。
常数值激增的速度为u0=30米/秒。
除了飞行动力学,这架飞机的代表性还包括副翼和方向舵作动器。
两个制动器的最大振幅偏转为40。
最大速率限制为10度/秒。
利用matlab的ode()函数求得其微分方程的数值解。
300.174530.698130029.9990.176920.69814 5.0237e-05 2.9427e-0729.9980.17930.698140.00010047 5.9253e-0729.9970.181690.698140.000150718.9479e-0729.9960.184070.698150.00020094 1.201e-0629.9920.1960.698170.00045208 2.7922e-0629.9870.207920.698180.00070318 4.4832e-0629.9820.219850.69820.00095424 6.2741e-0629.9780.231770.698220.00120538.1648e-0629.9550.291390.698310.0024598 1.9116e-0529.9320.3510.69840.0037134 3.2563e-0529.9090.410610.698490.004966 4.8505e-0529.8860.47020.698570.0062176 6.6943e-0529.7710.768060.698950.0124610.0001965529.657 1.06570.699260.0186810.0003884829.543 1.36320.699510.0248770.000642729.43 1.66050.699690.0310490.0009591628.869 3.14380.699640.0615570.003473728.32 4.62230.697990.0914830.0075383。
飞机横侧向运动

⎧m∆v + mV0 ∆r = ∆Y a + Gφ ⎪ I x ∆p − I xz ∆r = ∆La ⎨ ⎪ I ∆r − I ∆ p = ∆ N a xz ⎩ z
φ
L
L cosφ L sinφ
o
p
y0
y
z
z0
飞机横侧运动的稳定性
飞机横侧运动的三种典型模态Fra bibliotek 滚转阻尼模态
荷兰滚Dutch Roll模态(振荡模态)
螺旋模态
飞机横侧运动模态的简化
滚转阻尼模态的简化
荷兰滚模态的简化
螺旋模态的简化
飞机横侧向运动的传递函数
飞机的横侧向运动
1. 飞机横侧向运动的线性化方程; 2.飞机横侧向运动的模态及其物理成因; 3.横侧向典型运动模态的简化
飞机横侧向运动的线性化方程
飞机的横侧运动包括飞机的滚动、偏航和侧向移动三个自由 度的运动。飞机横侧运动的主要操纵面是副翼和方向舵,是 横侧动力学环节的操纵输入。仍然考虑基准运动为等速水平 飞行情况。考虑在飞机的偏航运动中,为保持飞机的基准运 动水平飞行,当机体转动 φ 角度,必须满足升力在垂直方向 的分量=飞机重力,从而在水平方向出现分力成为侧力的一 部分,水平侧力为 G sin φ ,线性化增量形式为 G∆φ,该力不 能忽略,这样方程可以表示为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.三种模态的简化处理(续)
2.荷兰滚模态的简化处理 初步近似认为滚转运动对荷兰滚模态没有影响,即认为偏航
和侧移运动不受滚转速率和滚转角的影响,得到:
全自由度方程解: 偏差较小:
3)螺旋模态的简化处理
螺旋模态在各运动参数中只占据很小的份额,而且运动参数 的变化慢,因此初步近似时,惯性项可以忽略,令方程中:
二、横侧向扰动运动与三种模态
纵向运动时的同一飞机,以M=0.9.高度h=11000m作定常平飞, 各参数及气动导数如下(对稳定轴系):
由表中表 达式计算:
拉氏变换后得代数方程:
扰动运动 控制输入为0:a=r=0
特征多项式:
特征根:
扰动运动的解
一对共挽复根代表振荡运动模态 大负根代表滚转快速阻尼模态 小根(可正可负)代表缓慢螺旋运动的模态 飞机横侧扰动运动由此三种典型模态线性叠加而成
飞机:倾斜转弯(bank-to-turn)
2、导弹的控制
利用升力、侧力控制导弹飞行轨迹-产生加速度(过载) 水平舵面—,升力,法向过载,上下飞行 垂直舵面—,侧力,侧向过载,左右飞行 滚转:无a,同一平面舵面的差动偏转—滚转力矩
鸭式导弹 鸭翼,不受气流下洗的影响,改变气动特性
推力矢量控制 导弹舵面气动力小,靠推力改变方向控制
三种模态中,振荡模态的系数最大,说明这一模态在横侧 运动各参数中均有明显的表现。
与纵向短周期相同,航向静稳定性导数Cn起恢复作用, 消除侧滑角;侧力导数CY和航向阻尼力矩导数Cnr起阻尼
作用;
CY和Cnr在数值上很小,因此横侧向振荡模态的衰减很慢。
与纵向短周期模态不同的是:由于横滚静稳定性导数的存 在,伴随着侧滑角的正负振荡,飞机还产生了左右滚转的 运动。航向和滚转运动的耦合。
第一章 飞行动力学
第九节 飞机的横侧向运动
2012,3
一、横侧向运动的线性化方程
飞机横侧运动包括滚转、偏航和侧移三个自由度的运动
操纵面是副翼a和方向舵r—侧向状态方程的输入量
线化方程:
重力倾斜产
生的侧力
将侧力Y, 滚转力矩L 和偏航力 矩N线性化
一、横侧向运动的线性化方程
基准运动—等速直线平飞状态的横侧小扰动线化方程:
第九节 结束
飞机侧向动力学的重点: 横侧向状态变量,线性方程 三个模态及其特性 理解传递函数描述 理解简化与参数分析(来自于方程)
此课件下载可自行编辑修改,供参考! 感谢您的支持,我们努力做得更好!
1)燃气舵:高速燃气流,控制耐热舵面偏转 2)摆动发动机:控制推力方向—推力线变化,产生力矩
弹道式导弹:依据弹道计算修改推力线 3)摆动喷管:固体火箭发动机,喷管摆动,改变推力
3、轴对称系统的传递函数特点
三通道交叉影响小
1)侧滑角=0, 只引起升力、俯仰力矩; 只引起侧力、偏航力矩
不引起滚转力矩
Y
& irNL r& p& & ip11L iippiiN rr
0
0
1
irNpLp irNr Lr 1ipir 1ipir
ipLpNp ipLr Nr
1ipir
1ipir
1
0
Y
0
0
irNa La
p 1ipir
r
0
ipLa Na 1ipir
0
0
Yr
irNr Lr
1ipir ipLr Nr
2) =0,也不引起滚转力矩 3)只有 0和0,且 时才会引起小量的滚转力矩
荷兰滚运动变成无滚转的振摆运动,与纵向短周期动态过程 相同,传递函数也相同
导弹以法向、侧向过载为控制目标
nz
LQSCLan
G mg g
ny
Y QSCY G mg
ay
g
an, az—法向加速度; ay—侧向加速度
4、控制目的
2、令方向舵r偏转为零,得出各变量对a的传递函数:
、、 & 的传递函数:
若以偏航角为输出量:
分母中有一个积分环节, 积分环节的输出与输人无比例关系,即航向运动受扰后不能 回复到受扰前的航向。 飞机航向角的变化不会改变力和力矩的平衡,因此飞机具有 航向随遇平衡的性质。这称为横侧运动的一种模态,即航向 中立稳定模态。
4.三种模态的简化处理
1)滚转阻尼模态的简化处理 具有大展弦比机翼的飞机,其滚转阻尼导数在滚转阻尼模态
中占据绝对地位。 只考虑一个滚转速率p的自由度,运动微分方程为:
经拉氏变换得特征方程:s+Lp=0,代入数据:s=-Lp=-2.2612 与精确解s=-2.28261的误差为s=0.94%。
r和a脉冲响应
a主要引起 滚转响应 会产生荷兰 滚模态响应
四、二自由度荷兰滚运动的近似传递函数
由荷兰滚模态的简化方程
可得近似传函:
若Yr近似为0,进一步有:
将前例中的数据代入,得:
五、一自由度滚转运动近似传递函数
副翼偏转主要引起滚转运动,且叠加一定程度的荷兰滚振荡 运动。
忽略荷兰滚运动的影响,令
传递函数及频率特性举例
以纵向运动所分析的同一飞机为例,各大导数:
代入横向方 程,经拉氏 变换:
解得:
(分母)特征多项式:
荷兰滚振荡频率
频率特性:
除(j)/a(j)外,其余传递函数的频率特性中均出现荷兰滚峰值。说 明除了/a响应,其余脉冲响应中荷兰滚运动都起主要作用。
由于/a中有零极对消
方向舵偏转主要引起荷兰滚模态运动,对滚转模态的影响不 很明显。副翼偏转主要引起滚转模态运动,对荷兰滚模态有 一定影响。
ar
1ipir
0
可以直接用状态方程,不必从传递函数导出
式中:
ir
Ixz Ix
,
ip
Ixz Iz
第十一节 导弹飞行运动的特点
1、外形 飞机外形
面对称(三翼面),机翼为主,产生较大气动力 导弹外形
“+”字形、“”字形轴对称 1)—升力,—侧力,作用相同
偏航与俯仰特性相同,与滚转无耦合 2)导弹:侧滑转弯STT(skid-to-turn)
若横滚静稳定性设计得太大(Cl的负值太大),会使荷兰滚模态不稳定。
3.螺旋模态
当Cl较小而Cn较大时,易形成不稳定的螺旋模态。 若t=0有正的滚转角(>0),则升力L右倾斜与重力合力使飞机向右侧滑,
由于Cl小,则使角减小的负滚转力矩小,而Cn较大,使得偏航角速率r 正值大。交叉动导数Clr为正,产生较大的正滚转力矩。
飞机是多输入多输出系统,可用状态方程描述,去掉
纵向状态方程 横侧向状态方程
V& & q&
XV
ZV
(MV M&ZV
)
&
0
X Z (M M&Z ) 0
0
Ze
(Me M&Ze )
0
XT
0 e
MT
T
0
0 X V
1 (Mq M&)
0 0
q
1
0
超音速飞机一般都是小展弦比机翼,Clp小,滚转阻尼特性不
好,因此有必要加人工阻尼。 2.荷兰滚模态 航向静稳定性Cn越大,荷兰滚模态固有频率越高; Cl太大,会降低荷兰滚阻尼。 3.螺旋模态
可以通过改动飞机几何参数(如上反角), 调整Cl的值,
使得螺旋模态稳定,或虽不稳定,但发散不致过快。
飞机方程
TL与V0成反比。
3.螺旋模态 螺旋模态小实根的近似表示式
由于
远远大于其他项,所以
螺旋模态时间常数 与飞行速度成正比
七、气动导数变化对横侧动力学特性的影响
1.滚转阻尼模态
时间常数与飞机横滚阻尼气动导数Clp成反比 Clp大,滚转阻尼特性好;过大,副翼操纵滚转困难,飞机进
入盘旋太慢,影响盘旋机动性能;
经拉氏反变换,(设0=1)得
-较少受滚模 态影响
都受振荡模态 影响
1.滚转阻尼模态
飞机受扰后的滚转运动,受到机翼产生的较大阻尼力矩的 阻止而很快结束。
这是由于大展弦比机翼的滚转阻尼导数Clp大,而转动惯 量Ix较小所致。
滚转阻尼模态对应一个大的负实根,单调过程。
2.荷兰滚模态(振荡摸态)
当负滚转力矩小于正滚转力矩时,飞机更向右滚转.于是合力作用使飞机 更向右侧滑。
如此逐渐使角正向增大,升力的垂直分量Lcos则逐渐减小,轨迹向心 力Lsin则逐渐增大,致使形成盘旋
半径愈来愈小,高度不断下降的螺旋 线飞行轨迹,故称为螺旋模态。 螺旋模态的初期发散是很缓慢的 设计时要与荷兰滚模态配合, 为尽量增大荷兰滚模态的阻尼比, 宁可让螺旋模态有稍微的不稳定
加剧向左侧滑的作用,这就抵消了一部分偏航运动的阻尼效果。 出现左侧滑角时,又会重复上述过程,
但方向相反。 这种飘摆运动的飞行轨迹呈s形,同时又
左右偏航、左右滚转,很像荷兰人滑冰 的动作,故称荷兰滚模态。 滚转运动加入到振荡运动中使本来就较小 的阻尼比进一步减小,所以必须选择适当 的横滚静稳定性。
P=Pp=Pr=0,经拉氏变换:
特征多项式: 代入数据,
全量系统的精确解:
解得: 误差为:
螺旋摸态的稳定条件:b4>0, 转为小导数:
一阶系统
三、横侧向运动的传递函数
以方向舵r和副翼a偏转为输入的传递函数,在零干扰和零
初始条件下经拉氏变换,横侧向方程:
1、令副翼a=0,对r的传递函数:
分母均为4阶特征多项式
2.荷兰滚模态
设某时刻有正侧滑>0,航向静稳定性Cn产生正的偏航力矩以消除正侧滑, 飞机产生正偏航角速率r>0。同时横滚静稳定性Cl产生负的滚转力矩,使 飞机向左滚转(<0)。
由于转动的惯性作用,在消除正侧滑角之后会出现负侧滑角<0。但此时 飞机已产生了负滚转角(<0),使升力L向左倾斜,与重力的合力起到