§7.5 离散系统的稳定性与稳态误差 )
第七章--线性离散系统的稳定性分析

取反变换,得 g (k ) b0δ (t ) b1δ (t T ) bnδ (t nT )
• 上式表明,一个n阶稳定系统的脉冲响应序列共有n个脉冲, 如果在典型信号输入作用下,系统脉冲响应过程将在n个 采样周期内结束(对连续系统而言,理论上动态过程在 t→∞时才结束),由于这种系统瞬态响应时间最短,故称
0.11K 0 1.1 0.095 K 0 2.9 0.015 K 0
因此,使系统稳定K值范围为
0 K 11.58
• 采样器和保持器对离散系统的动态性能有如下影响: 1)采样器可使系统的峰值时间和调节时间略有减小,但使超调量增大, 故采样造成的信息损失会降低系统的稳定程度。 2)零阶保持器使系统的峰值时间和调节时间都加长,超调量和振荡次数 也增加。这是因为除了采样造成的不稳定因素外,零阶保持器的相角滞后降
y* t
5
4
3
2 1
0
T
2T
3T
4T
5T
t
单位斜坡响应 暂态过程只要两个采样周期即可结束!
将上述系统的输入信号改为单位阶跃信号 r (t ) 1(t )
则系统的输出信号的z变换为
1 Y ( z ) GB ( z ) R( z ) (2 z 1 z 2 ) 1 z 1 2 z 1 z 2 z 3 L z n L 此时动态过程也可在两个采样周期内结束,但在t=T时超 调量为100%。
映射稳定区域左半s平面不稳定区域右半s平面临界稳定区域虚轴上单位圆内部单位圆外部单位圆上线性离散系统稳定的充分必要条件离散系统极点分布与稳定性的关系由由s平面与z平面的映射关系及连续系统的稳定性理论可知离散系统极点分布与其稳定性的关系如下极点分布稳定情况z单位圆内稳定z单位圆外不稳定z单位圆上临界稳定线性离散系统的稳定判据由前面的分析可知只要知道系统的极点分布即可判断系统的稳定与否但这里要解决的问题是如何知道闭环系统的极点分布
离散系统的稳定性与稳态误差(精)
bn 1 ak
第七行系数
第八行系数 最后行系数
q0
2019/3/19
, q1
, q2
Automatic Control Theory
Jury稳定判据:特征方程 D( z ) 0 的根,全部严格位于 z平面上单位圆内的充要条件是:
n为偶数 0 , D( z ) z 1 D(1) 0 , D( z ) z 1 D(1) 0 , n为奇数
14
第三行系数 第四行系数 第五行系数 第六行系数
bk ck dk p0 p3 p3 p0
a0 an b0 c0 cn 2
ank ak bn k 1 cn k 2 ak p0 p3
k 0,1,, n 1 k 0,1,, n 2 k 0,1,, n 2 p2 p1 p0 p3 p1 p2
k
k
(k 0,1,2)
pi 1, i 1,2,, n,
lim c(k ) 0
pi 1, i 1,2,, n,
系统稳定的充分必要条件: 若
相应的线性定常离散系统是稳定的。
2019/3/19
Automatic Control Theory
5
(2)离散系统稳定的充要条件(z域) 对于典型的离 散系统结构的 闭环脉冲传递 函数为
0.3679 0.2642K 1 K 2.3925 0.3679 0.2642K 1 K 5.1775 5.1775 K 2.3925
(2) D(1) 1 (0.3679K 1.3679 ) 0.3679 0.2642K 0.6321 K 0 K 0
(3) D(1) (1) 2 (0.3679K 1.3679 ) 0.3679 0.2642K 2.7358 0.1037K 0 K 26.382
7-5离散系统的稳定性和稳态误差
(T − 1 + e − T ) z + (1 − e − T − Te − T ) = K ( z − 1)( z − e −T )
T =1
=
0.368 K ( z + 0.718 ) ( z − 1)( z − 0.368 )
Φ( z ) =
G( z ) 0.368 K ( z + 0.718 ) = 2 1 + G ( z ) z + ( 0.368 K − 1.368 ) z + ( 0.264 K + 0.368 )
例.设有零阶保持器的离散系统如下图所示,试求: 设有零阶保持器的离散系统如下图所示,试求: 1)当采样周期 分别为1s 0.5s时 1s和 1)当采样周期 T 分别为1s和0.5s时,系统的临界开环增益 K c 2)当 2)当 r (t ) = 1( t ) ,K = 1 ,T 分别为 0.1s,1s,2 s,4 s 时,系 统的输出响应 c (kT ) 。
1 = (1 − z ) K ⋅ Z 2 s ( s + 1) ( z − 1) K 1 1 1 ( z − 1) K = ⋅ Z 2 − + = z s s + 1 z s
−1
Tz z z ⋅ − + ( z − 1) 2 z − 1 z − e −T
1 ( z − 1)( z − 0.368) Φ e ( z) = = 2 1 + G ( z ) z − 0.736 z + 0.368
z1 = 0.368 + j 0.482 z2 = 0.368 − j 0.382
系统稳定,应用终值定理 系统稳定, 求稳态误差
培训_75离散系统的稳定性和稳态误差
数
m
1.单位阶跃输入时r(t) 1(t)
K(z zj)
R(z) z z 1
G(z)
j 1 nv
(z 1)v (z pi )
z 1 R(z)
z 1 1
z
ess
lim
z 1
z
lim
1 G(z) z1
z
1 G(z) z 1
i 1
对0型系统:K p
lim[1 G(z)],
z 1
对Ⅰ型系统:K p , ess 0
1 ess K p
对Ⅱ型及以上系统:K p , ess 0
0型系统在单位阶跃信号作用下存在位置 误差,I型及以上系统在单位阶跃信号作用下 不存在稳态误差。
2.单位斜坡输入时 r(t) t
R(z)
Tz (z 1)2
| z | eT , z T
j
ω sT/2 0
z平面
ω 1T -ω 1T
s平面上的等ω垂线,映射到z平面上的
轨迹是以原点出发的射线,相角z为 T
3. 等 线映射
j
j
β 2ω s
ωs 4
s tan j
ωs 0
ωs 2
ωs
ω s=0
0
3ω s
z esT e( tan j)T
0
加速度误 差
∞
∞ 1 Ka 0
m
K(z zj)
G(z)
j 1 nv
(z 1)v (z pi )
i 1
ess
lim
z 1
z
1 R(z) z 1 G(z)
04 离散系统稳定性与稳态误差

内 z平面单位圆 外 的点
2 2
x 2 y 2 1 [z] 单位圆
u 0 对应w平面 u 0
1 x y 1
第七章 线性离散系统的分析与校正
w域中的劳斯稳定判据
经过w变换离散系统稳定的充要条件就转换为特征方程 1 GH ( w) 0 的所有根位于w左半平面,和在s平面上用劳斯判据情况一样,所以 可以直接用劳斯表来判定系统稳定性,成为w域的劳斯稳定判据。
第七章 线性离散系统的分析与校正
j
S
1
Z
z eT z T
0
稳定
0
不稳定
0 0 ——s平面的虚轴
0 0
——s平面的左半平面 |z|=1——z平面的单位圆 |z|<1——z平面的单位圆内 |z|<1——z平面的单位圆外
Jurry
1 2
3
z0
39 45
z1
119 - 117
z2
- 117 119
z3
45 - 39
39 45 39 117 504 624 45 - 39 45 119
792 624
39 119 792 45 - 117
504
4
系统不稳定
第七章 线性离散系统的分析与校正
1.368 0.399
1 0.399 0.0827 1.368
0.399 1.368
1 1.368 0.0827 0.399
0.0827 1
0.993 0.512
1.401 1.401
《自动控制原理》稳定性和稳态误差
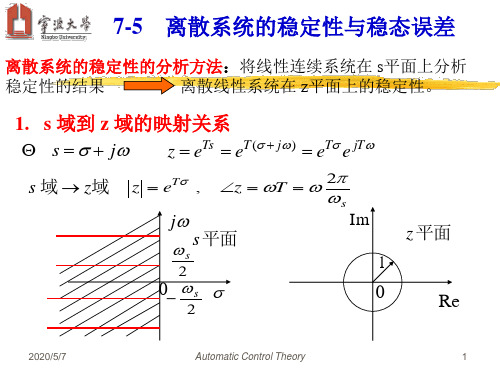
7-5 离散系统的稳定性和稳定误差 回顾:线性连续系统 稳定性和稳态误差问题:线性离散系统 稳定性和稳态误差 ?分析:sT e z =,首先研究s 平面与z 平面的关系。
一.s 域到z 域的映射s 域到z 域的关系: sT e z = S → Zs 域中的任意点可表示为ωσj s +=,映射到z 域则为 T j T T j e e e z ωσωσ==+)(ωσj s += ━━━━━━━━→ T e z σ=,T z ω=∠ (7—84)问题:s 平面上的点、线、面 如何映射到 z 平面?(1) s 平面上虚轴的映射虚轴:0=σ,ω=∞-→0→∞分析:0=σ时,1==T e z σ,ω=∞-→0→∞时,T z ω=∠==∞-→0→∞ 以原点为圆心的单位圆,经沿着单位圆转过无穷多圈分析:T 采样周期,单位[sec], 采样频率,单位[1/sec] f s =1/T采样角频率 s ω,单位[rad/sec] , T s /2πω=ω=2/s ω-→0→2/s ω时,T z ω=∠=π-→0→π 正好逆时针转一圈ω=2/s ω→s ω→2/3s ω时,T z ω=∠=π→π2→π3 又逆时针转一圈由图可见:可以把s平面划分为无穷多条平行于实轴的周期带,其中从-ωs/2到ωs/2的周期带称为主要带,其余的周期带叫做次要带。
(2) 等σ线映射s 平面上的等σ垂线,映射到z 平面上是以Te z σ=为半径的圆 s 平面上的虚轴映射为z 平面上的单位圆左半s 平面上的等σ线映射为z 平面上的同心圆,在单位圆内 右半s平面上的等σ线映射为z 平面上的同心圆,在单位圆外(3) 等ω线映射在特定采样周期T 情况下,由式(7-84)可知,s 平面的等ω水平线,映射到z 平面上的轨迹,是一簇从原点出发的映射,其相角T z ω=∠从正实轴计量,如图7-36所示。
由图可见,s 平面上2/s ωω=水平线,在z 平面上正好为负实轴。
§7.5离散系统的稳定性与稳态误差)

z T
图参见P348
§7.5.2 离散系统稳定的充要条件是 z i 1
—— F(z)的全部极点均位于z平面的单位圆内
m
证明:
Φ(z)M(z) D(z)
(zi) n
i1 n
(zj) j1
Cjz
zj
K(z)
j1
n
k
c(k) Cjjk 0
j1
j 1
— 必要性
c*(t)k 0jn 1Cjjk(tkT )
静态加速度误差系数 Kalz i1m (z1)2GH (z)
r(t) t
Tz z (z 1 ) T1 e 2 ( T ) lz 1 i(z m 1 )(z 1 )2z 2 0 .8 z 0 .2 0 .4 2
r(t)t2 2
T 2 z(z 1 ) z(z 1 ) e 3 ( T ) lz i1( m z 1 )2 (z 1 )3z2 0 .8 z 0 .2
2. 静态误差系数法 —— r(t) 作用时e(∞)的计算规律
( 适用于系统稳定, r(t)作用,对误差采样的线性离散系统 )
设 G(H z)ZG (s)H (s)(z 11)vG0H (z)
lz im 1GH 0(z)K
Fe(z)E R((zz))1G1H (z)
e ( ) lz i1(m z 1 )F e(z)R (z)
x1jy
(x1)2y2
ujv
[w] 虚轴
x2 y2 1 u0(x1)2y2 0
x2y2 1 [z] 单位圆
z平面单位圆
内 外
的点
x2
y
2
1 1
u 0
对应w平面
u
0
例1 已知离散系统特征方程 ,判定系统稳定性。
7-5 离散系统的稳定性与稳态误差
7-5 离散系统的稳定性与稳态误差2.离散系统稳定的充分必要条件 离散系统稳定 若离散系统在有界输入序列作用下,其输出 序列也是有界的 (1)时域中离散系统稳定的充分必要条件n m 线性定常差分方程 c( k ) = − ∑ ai c( k − i ) + ∑ b j r ( k − j ) i =1 j =0 n 齐次差分方程 c( k ) + ∑ ai c( k − i ) = 0 i =1特征方程α n + a1α n − 1 + a 2α n − 2 + ... + an = 0 特征根 α α ..., α 1, 2 n(1)时域中离散系统稳定的充分必要条件 线性定常差分方程 齐次差分方程 特征方程 特征根c( k ) =n c( k ) + ∑ a i c( k − i ) = 0 i =12.离散系统稳定的充分必要条件n m − ∑ ai c( k − i ) + ∑ b j r ( k − i =1 j =0j)α n + a1α n − 1 + a 2α n − 2 + ... + an = 0 α 1,α 2 ..., α n差分方程通解 n k k k k c( k ) = A1α 1 + A2α 2 + ... + Anα n = ∑ Aiα i 当|αi|<1时,必有k →∞lim c( k ) = 0i =1稳定的充要条件 特征根的模|αi|<17-5 离散系统的稳定性与稳态误差1.s域到z域的映射s = σ + jωz = e (σ + jω )T = eσT e jωTjz=esTz的幅值和相角?| z |= eσT∠ z = ωTjeσ 1Te −σ 2T−σ2σ11(2)Z域中离散系统稳定的充分必要条件 特征方程 D( z ) = 1 + GH ( z ) = 0 特征根 z1,z2,…,znjr(t) e(t) e*(t) E(z)c*(t) C(z)G(s) H(s)c(t)j1 稳定充要条件 特征根模小于1, 即|zi|<1例7-27 设离散系统如图,其中G(s)=10/s(s+1), c*(t) H(s)=1 ,T=1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AT ATz 1 AT e(T ) lim ( z 1) 2 z 1 ( z 1) 1 GH ( z ) lim( z 1) GH ( z ) Kv z 1
静态速度误差系数
A 2 r (t ) t 2
K v lim ( z 1) GH ( z )
D( z ) z 2 ( z 1) KT z 3 z 2 KT 0
0 K 2.472
K与T对离散系统稳定性的影响:
T一定, K增大,离散系统的稳定性变差,甚至使系统变 得不稳定。 K一定, T增大,则丢失的信息越多,离散系统的稳定性 变差,甚至使系统变得不稳定。
e2 (T ) lim( z 1)
z 1
r (t ) t
r (t ) t 2
2
Tz z( z 1) T 1 ( z 1)2 z 2 0.8 z 0.2 0.4 2
T 2 z( z 1) z( z 1) e3 (T ) lim( z 1) 2 3 z 1 2( z 1) z 0.8z 0.2
D( w) w 3 2w 2w 40 0
Routh
1 w3 2 w2 w 1 18 w 0 40
2 40
系统不稳定
例4 离散系统结构图如图所示, T=1s,求使系统稳定的K值范围。 解:w域中的Routh判据
1 1 e Ts K 1 G( z ) Z (1 z ) K Z 2 s( s 1) s s ( s 1)
G( z ) 0.368K ( z 0.718) F( z ) 2 1 G( z ) z (0.368K 1.368) z (0.264K 0.368)
F( z )
G( z ) 0.368K ( z 0.718) 2 1 G( z ) z (0.368K 1.368) z (0.264K 0.368)
z 1
AT 2 z( z 1) 1 AT 2 e(T ) lim( z 1) 3 z 1 2 ( z 1) 1 GH ( z ) lim( z 1) 2 GH ( z )
z 1
AT 2 Ka
静态加速度误差系数 K a lim ( z 1)2 GH ( z )
§7.5.4 计算稳态误差的一般方法
1. Z变换中值定理法
若e(z)的极点全部位于Z平面的单位圆内,即离散系统是稳 定的,则可用Z 变换的终值定理求出采样瞬时的稳态误差。
ess () lim e (t ) lim(1 z 1 ) E ( z)
t z1
线性定常离散系统的稳态误差,不但与系统本身的结构参 数有关,与输入序列的形式及幅值有关,而且还与采样周期 T 有关。
z 1
1 GH ( z ) GH0 ( z ) v ( z 1)
Kp
K v lim
z 1
K a lim
z 1
lim GH ( z ) ( z 1) GH ( z ) ( z 1)2 GH ( z ) z 1
例 2 稳定离散系统的结构图如图所示,已 知 r(t)=2t, 试讨论有或没有 ZOH 时的 e(∞) 。 解.
D( z ) z 2 0.8 z 0.2 0 求根公式:z1,2 0.4 j 0.2 z1,2 0.447 1
系统稳定
r ( t ) 1( t )
T=0.2, K=10
z z( z 1) e1 (T ) lim( z 1) 2 0 z 1 z 1 z 0.8 z 0.2
1 1 GH ( z )
r ( t ) A 1( t )
Az 1 A A e(T ) lim ( z 1) z 1 z 1 1 GH ( z ) 1 lim GH ( z ) 1 K p z 1
静态位置误差系数
r (t ) A t
K p lim GH ( z )
2 z 1 T 2 z ( z 1) 1 KT z 1 (1 z ) K Z 3 K 2 s z 2( z 1) 3 2 ( z 1 ) z 1 Tz 1 KT 1 1 1 0.5(1 z ) K Z 2 1 0.5 K 1 z ( z 1) 2 s 2 z 1
e( ) lim ( z 1) F e ( z ) R( z )
z 1
1 lim( z 1) R( z ) z 1 1 GH ( z )
e(T ) lim( z 1) F e ( z ) R( z ) lim( z 1) R( z )
z 1 z 1
K K (1 e T )z G( z ) Z ( z 1)(z e T ) s ( s 1 ) 无ZOH时 K (1 e T ) z K v lim ( z 1)G( z ) lim K T z 1 z 1 (z e )
D( z ) z 2 (0.368K 1.368)z (0.264K 0.368) 0
z w 1 w 1
(
w 1 2 w 1 ) (0.368K 1.368)( ) (0.264K 0.368) 0 w 1 w 1
( w 1)2 (0.368K 1.368)(w 1)(w 1) (0.264K 0.368)(w 1)2 0
1 w z 1 w z 1 w z 1
T 1 w 2 z T 1 w 2 w 2 z 1 T z1
设 z x j y
w u jv
z 1 x 1 jy x 2 1 y 2 j 2 xy w u jv 2 2 z 1 x 1 jy ( x 1) y
D( w) 0.632Kw 2 (1.264 0.528K )w (2.736 0.104K ) 0
K 0 1.264 0.528 K 0 2.736 0.104 K 0
K 0 K 2.394 K 26.3
0 K 2.394
例4 系统结构图如图所示, T=0.25, 求使系统稳定的K值范围。
由z变换定义: z e 令: s j
sT
j
[ s]
稳定区
不稳定区
则:z e sT e T e jT
0
z e T z T
z 1 z 1 z 1
1
0 0 0
Im
[ z]
不稳定区 稳定区
0
1
Re
结论:S平面的稳定区域在Z平面上的 影象是单位圆内部区域
1 e Ts Ke 2Ts G( z ) Z s s 1 K ( z 1) Tz KT 1 2 K (1 z ) z Z 2 2 3 2 z ( z 1) z ( z 1) s
G( z ) KT F( z ) 2 1 G( z ) z ( z 1) KT
例1.已知离散系统结构图,K=10, T=0.2,求 r(t)=1(t), t, t2/2 时系 统的e(∞)。
解.
1 e Ts K Z 2 s s C(z) G( z ) E(z) 1 e Ts 0.5 K 1 Z s s
x2 y2 1 0 [w] 虚轴 u 0 2 2 ( x 1) y
内 z平面单位圆 外 的点
2 2
x 2 y 2 1 [z] 单位圆
u 0 对应w平面 u 0
1 x y 1
例1 已知离散系统特征方程 ,判定系统稳定性。
D( z ) 45z 3 117z 2 119z 39 0
z ( w 1) ( w 1)
w 1 3 w 1 2 w 1 45( ) 117( ) 119( ) 39 0 w 1 w 1 w 1
D( w) 45( w 1)3 117( w 1)2 ( w 1) 119(w 1)(w 1)2 39(w 1)3 0
( z 1) K 1 1 1 ( z 1) K Tz z z Z 2 2 T z s s s 1 z ( z 1 ) z 1 z e
(T 1 e T ) z (1 e T TeT ) T 1 0.368K ( z 0.718) K T ( z 1)(z e ) ( z 1)(z 0.368)
2. 静态误差系数法 —— r(t) 作用时e(∞)的计算规律
( 适用于系统稳定, r(t)作用,对误差采样的线性离散系统 )
1 GH ( z ) Z G( s ) H ( s ) GH0 ( z ) v ( z 1) lim GH 0 ( z ) K
z 1
设
E( z) 1 Fe ( z ) R( z ) 1 GH ( z )
w 1
可以应用劳斯判据判稳了。为了区别 s 平面下的劳斯判据,
称 w 平面下的劳斯判据为推广的劳斯稳定判据。
j
[ s]
Im
[ z]
稳定区
不稳定区
不稳定区
0
ze
j
sT
1
稳定区
0
1
Re
[w]
0
u
w z 1 z 1
双线性变换
w 变换
w1 z w 1 z 1 w z 1
§7.5 离散系统的稳定性与稳态误差
§7.5 离散系统的稳定性与稳态误差
§7.5.1 s →z 映射