弹性力学极坐标公式的记忆规律_张长平
弹性力学:第四章 平面问题的极坐标解答(1)

)
1 2
E
(
1
r)
r
1 G
r
2(1 E
)
r
(4-4)
弹性力学平面问题极坐标求解的基本方程: (平面应力情形)
r
r
§4-5 轴对称应力与相应的位移
§4-6 圆环或圆筒受均布压力 压力隧洞 §4-7 曲梁的纯弯曲 §4-8 圆盘在匀速转动中的应力与位移 §4-9 圆孔的孔边应力集中 §4-10 楔形体的楔顶与楔面受力
§4-11 半平面体在边界上受法向集中力 §4-12 半平面体在边界上受法向分布力
§4-1 极坐标中的平衡微分方程
平面问题的极坐标解答包含的内容和直角坐标
一样,所有的结论都可以通过坐标变换来得到,在
这里,为了更清楚的表明各公式和符号的含义,我 们仍然采用推导来求解。
主 要内容
§4-1 §4-2 §4-3
§4-4
极坐标中的平衡微分方程 极坐标中的几何方程与物理方程 极坐标中的应力函数与相容方程
应力分量的坐标变换式
d ) ur
PB
rd
1 ur
r
(d)
径向线段PA的相对伸长:
ur
r1
r (a)
径向线段PA的转角:
1 0
(b)
环向线段PB的相对伸长:
1
ur r
(c)
环向线段PB的转角:
1
1 ur
r
剪应变为:
(d)
r 1
1
1
1 r
ur
O
d
r
P
ur
dr P
x
A
ur
ur r
dr
A
B
1
弹性力学直角坐标解答

根据材料的本构关系, 引入物理方程来表达应 力分量与应变分量之间 的关系。
针对具体问题的边界条 件,如固定端、自由端 或受力边界等,对平衡 方程和几何方程进行适 当的处理。
根据问题的性质和复杂 程度,选择合适的求解 方法,如分离变量法、 积分变换法或数值方法 等,以求解平衡方程和 几何方程,得到应力分 量和位移分量的解答。
多场耦合问题
涉及多个物理场的相互作用,如热-力、电-力等耦 合问题,使得边界条件更加复杂。
处理复杂边界条件方法
坐标变换法
通过坐标变换将复杂边界转换为简单边界,从而简化问题的求解。
近似解法
采用近似函数逼近复杂边界条件,将问题转化为可求解的近似问题。
数值解法
利用数值计算方法(如有限元法、有限差分法等)对复杂边界条件 进行离散化处理,进而求解弹性力学问题。
直角坐标系下应力应变关系
应力分量
在直角坐标系下,一点的应力状态可以用六个应力分量来 表示,即三个正应力分量和三个剪应力分量。
应变分量
与应力分量相对应,一点的应变状态也可以用六个应变分 量来表示,即三个正应变分量和三个剪应变分量。
应力应变关系
在弹性力学中,应力和应变之间存在一定的关系,这种关 系可以用广义胡克定律来描述。对于各向同性材料,应力 应变关系可以简化为三个独立的方程。
03
空间问题直角坐标解答方 法
空间应力问题求解思路
应力分量求解
叠加原理应用
根据弹性力学基本方程,利用直角坐标 系下的应力分量表达式,通过给定的边 界条件和载荷,求解各应力分量。
对于多个载荷同时作用的情况,可利用 叠加原理将问题分解为多个简单问题分 别求解,再将结果叠加得到最终解。
应力函数引入
弹性力学 第七章平面问题的极坐标解答

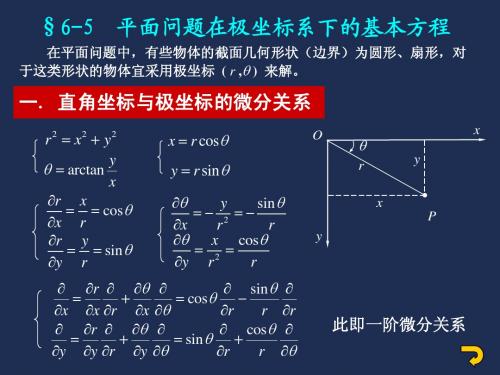
arctan y
x
y r sin
x
y
r x
y
两种坐标系下位移分量坐标转换公式:
ur u
v sin u cos
v
cos
u
sin
u v
ur ur
cos sin
u u
sin cos
r
u
x
u
v
ur y
2、极坐标下的平衡微分方程
•几何描述
PB面积:rd AC面积:(r+dr)d
第七章 平面问题的极坐标解答
•本质上坐标系的选择并不影响弹性力学问题的求 解。 •但是影响边界条件的描述和表达,从而关系问题 的求解难易程度。 •圆形,楔形,扇形等物体,采用极坐标系求解比 较方便。
采用极坐标可更方便几何定位描述。
§7-1 平面问题的极坐标方程
1、极坐标与直角坐标之间的关系式:
r2 x2 y2
rds 1 xds cos 1 cos yds sin 1 sin
xyds cos 1 sin yxds sin 1 cos 0
用 xy 代替 yx 简化以后,得
r x cos2 y sin2 2 xy sin cos
o
yx y
x
y
B x
y
r
xy xya
c
A
x
b r r
同样可由三角板A的平衡条件F=0,得到 r ( y x )sin cos xy (cos2 sin2 )
和y分别改换为r和 。
r
1
E
2
( r
1
)
1 2
E
(
1
r
)
r
弹性力学平面问题的极坐标解答课件
b
a
2
ln
a
b2
a
2
0
位移的确定
H, I, K待定
u
1 E
(1 )
A
(1 3 )B
2(1 )B(ln
1)
2(1
)C
I
sin
K
cos
u
4B
E
H
I
cos
K
sin
左端固定:(u )0 0
0,
(u ) 0 0
0,
u
0
0
0
常数的确定:
H
I
0,
K
1 E
极坐标下的双调和方程
代入协调方程,得到应力函数U需满足
的双调和方程
2
2
1
1
2
2
2
2U
2
1
U
1
2
2U
2
0
§7-2 轴对称应力及其位移
应力函数与无关,双调和方程为
d2
d 2
1
d
d
d2 U
d 2
1
dU
d
0
4
d4 U
d 4
23
d3 U
d 3
2
d2 U
d 2
dU
问题描述 任一截面上的弯矩:
M () F cos R tan F R sin
应力函数:
U f () sin
O
m
ba
F
x
n
y
f()的求解及应力表达式
微分方程及其通解
d2
d 2
1
d
d
1
2
d2 f
6-3弹性力学平面问题(极坐标)
在不计体力的情况下, 可通过微分关系直接由直角坐 标系下的相容方程得到。
1 1 2 r , 0 (展开共8项) 2 2 r r r r 将O-xy坐标系旋转至 x 与 r 重合,即 0,此时
2 2 2
所以
y
r
x
当体力不为零或无势时,可用应力表示相容方程
x r
P
r r
r
r
视 P-r 为旧坐标,P点的应力状态为 r、、r r ; 视 O-xy 为新坐标,求P点的应力分量 x、y、xy yx 。
由应力状态的坐标转换公式
代入计算得
(3)体力分量的坐标转换 设极坐标系下的体力分量为 Fbr 、Fb 。 将其分别向 x、y 方向投影得
y r x
以此位置的直角坐标系, 建立平衡微分方程。即
同理
x r x r 0 y 1 2 r r y 0 r
xy r r x 0 xy 1 r r r y 0 r
Fb O
x
r
P Fbr r
y
2. 极坐标系下的平衡微分方程 由直角坐标系下的平衡微分方程推导
x sin cos r cos2 sin 2 2 r sin cos x r r
cos3
2 2
2
(无体力)
F F F 或 2 r 1 br br 1 b (计体力) r r r
应力分量 (不计体力)
( r ) s l1 ( r ) s l2 pr ( r ) s l1 ( ) s l2 p
弹性力学 第4章_平面问题的极坐标解答

0,
略去三阶微量,保留到二阶微量,得
1 2
f 0。
目录
(b)
14
§4.1 极坐标中的平衡微分方程
式(b)中1、2、4项与直角坐标的方程相 似,而
τ ρυ
τ υρ ρ
--是由于 ρ面的面积大于 ρ 面引起的, --是由于 面上的切应力 τ υρ 在C点
而
cos , x
sin , x
sin ; y
cos 。 y
代入,即得一阶导数的变换公式,
Φ sin Φ sinυ Φ cosυ (cosυ )Φ , x ρ ρ υ ρ ρ υ
Φ cos Φ cosυ Φ sinυ (sinυ )Φ。 y ρ ρ υ ρ ρ υ
(e)
34
§4.3 极坐标中的应力函数及相容方程
二阶导数的变换公式,可以从式(e) 导 出。例如
2 Φ ( Φ ) x x x 2 sinυ )(cos Φ sinυ Φ ). (cosυ υ ρ ρ υ ρ ρ υ
展开即得:
35
§4.3 极坐标中的应力函数及相容方程
Φ ( x, y ) 可看成是 Φ Φ(ρ,υ) ,而 ρ,υ 又
是 x, y的函数,即 Φ 是通过中间变量 ρ,υ, 为 x, y 的复合函数。 有:
Φ Φ ρ Φ υ , x ρ x υ x
Φ Φ ρ Φ υ. y ρ y υ y
33
§4.3 极坐标中的应力函数及相容方程
(3) 应用应力变换公式(下节)
σ ρ σ x cos 2 υ σ y sin 2 υ 2τ xy cosυsin υ Φ cos υ Φ sin υ 2 Φ cosυsin υ. 2 2 xy y x
物理精华力学基本公式速记
物理精华力学基本公式速记在物理学中,力学是研究物体运动和受力的科学。
对于学习力学的学生来说,掌握力学基本公式是非常重要的。
本文将为大家介绍一些物理精华力学基本公式的速记方法,帮助大家更好地理解和记忆这些公式。
一、速度和加速度公式1. 速度公式:速度(v)等于位移(s)除以时间(t)。
v = s / t这个公式表达了物体在一段时间内移动的快慢程度,单位通常是米每秒(m/s)。
2. 加速度公式:加速度(a)等于速度(v)的变化量(Δv)除以时间(t)的变化量(Δt)。
a = Δv / Δt加速度表示单位时间内速度的变化情况,单位通常是米每秒平方(m/s²)。
二、力和牛顿第二定律3. 力的公式:力(F)等于物体的质量(m)乘以加速度(a)。
F = m × a这个公式描述了力对物体运动状态的影响,单位通常是牛顿(N)。
4. 牛顿第二定律:物体的加速度(a)等于作用在物体上的净力(Fnet)除以物体的质量(m)。
a = Fnet / m牛顿第二定律是力学中的核心定律,它明确了力和运动之间的关系。
三、力和力的计算5. 重力公式:重力(Fg)等于物体的质量(m)乘以重力加速度(g)。
Fg = m × g在地球上,重力加速度的典型值约为9.8米每秒平方(m/s²)。
6. 弹力公式:弹力(Fspring)等于弹簧的弹性系数(k)乘以弹簧伸缩的长度变化量(Δx)。
Fspring = k × Δx弹力是指由于弹簧的伸缩而产生的力。
四、动能和势能7. 动能公式:动能(KE)等于物体的质量(m)乘以速度的平方(v²)的一半。
KE = 1/2 × m × v²动能表示物体的运动能力或做功的能力。
8. 势能公式:势能(PE)等于物体的质量(m)乘以重力加速度(g)乘以高度(h)。
PE = m × g × h势能是指物体由于位置而具有的能量。
06-弹性力学解题方法

§4-3 按应力求解弹性力学问题
基本方程
ij
x j
fi
0
ij
1
E
ij
E
ij
ij
1 ui 2 x j
u j xi
相容方程(应变协调方程):
2 x
y 2
2 y
x 2
2 xy
xy
2 y
z 2
2 z
y 2
2 yz
yz
2 z
x 2
2 x
z 2
2 zx
zx
x
xy
z
zx
弹性方程:
r
E
1
1
2
u r
1
E
1
2
u r
z
E
1
1
2
w z
zr
E 2(1
)
u z
w r
r z 0
z 0 r 0
E 2(1
)
1
1
2
r
2u
u r2
fr
0
u u w
E 2(1
)
1
1
2
z
2w
fz
0
r r z
2
2 r 2
1 r
r
2 z 2
u z
w x
Fx
lG
u y
v x
m
2G
v y
nG
v z
w y
Fy
解题思路:
G
1 2
xi
G 2ui
fi
0
(4-3)
n
jG
ui x j
u j xi
弹性力学极坐标求解

的位移分别为
u
u
d
和
u
u
d ,
见图4-2(b)。同样考虑
PA
的转角α
是微小的,我们可以得出:
PA 的线应变: 0
转角:
AAPP u PA
14.05.2021
9
第四章 平面问题的极坐标求解
PB 的线应变:
BBPB PP 1u
转角:
u
需要说明的是: u 是由于环向位移而引起的环向线段的
而ρ,φ又是x,y的函数,如式(b)所示。因此 x, y
可以认为是通过中间变量(ρ,φ)的关于(x,y)的复 合函数。按照复合函数的求导公式,有:
x x x y y y
14.05.2021
17
第四章 平面问题的极坐标求解
其中ρ,φ对x,y的导数,可以由式(b)得出:
弹性力学极坐标求解
第四章 平面问题的极坐标求解
2.正负符号的规定
(1)在极坐标中,ρ从原点出发,以向外为正; 而φ以 x轴正向到 y轴正向的转向为正; (2)应力的表示和符号规定与直角坐标相同,仍 以正面正向,负面负向的应力为正,反之为负; (3)微分体上的体力为 f ρ 和 f φ ,表示于微分体的 中心,分别沿径向和环向,以沿正坐标方向为正 ,反之为负。
14.05.2021
25
第四章 平面问题的极坐标求解
4.5 轴对称应力和相应的位移
1.概念
轴对称,即绕一轴对称,是指通过此轴的任何面均为 对称面。
2.轴对称物理量的特点
(1)方向必须对称,因此,方向不对称的物理量不应 存在。因此:
0
(2)数值必须相同,因此,它只能是ρ的函数,沿φ 向不变 。由此可见,凡是轴对称问题,总是使自变量 减少一维,即:
弹性力学极坐标公式利用矩阵形式的对比教学
弹性力学极坐标公式利用矩阵形式的对比教学
王力威
【期刊名称】《黑龙江教育(高教研究与评估版)》
【年(卷),期】2012(000)007
【摘要】利用弹性力学平面问题中有很强规律性且容易记忆的基本方程的直角坐标矩阵形式,按极坐标系与直角坐标系之间物理量、微分算子的对应关系,考虑特殊情况,可列出基本方程及物理量的极坐标矩阵表达形式。
两种坐标系下的公式具有一定的对应规律,得到的极坐标矩阵形式体现出很强的规律性和记忆特点,矩阵形式易化成一般表达式。
教学中可利用这些规律进行对比讲授,从而使学生对较为复杂且采用通常方法不易记忆的基本方程或物理量的极坐标形式变得有规可循,容易记忆和掌握。
【总页数】2页(P20-21)
【作者】王力威
【作者单位】常州大学,江苏常州213164
【正文语种】中文
【中图分类】G642.0
【相关文献】
1.弹性力学极坐标公式的记忆规律
2.弹性力学本科教学中的矩阵表达形式
3.弹性力学教学中的归纳对比法实践
4.弹性力学极坐标公式记忆规律
5.利用电荷量子比特促进矩阵力学的教学
因版权原因,仅展示原文概要,查看原文内容请购买。
弹性力学11-极坐标中的平衡微分方程

注意微分体中:
j 面不平行,夹角为 dj ; 两 r 面面积不等,分别为rdj 和(r+dr)dj r 从原点出发为正, j 从 x 轴向 y 轴方向转动为正。
两
第四章 平面问题的极坐标解答 4.1 极坐标中的平衡微分方程
应力分量的定义:
r 方向的正应力称为径 向正应力,用 sr 表示;沿 j
同理,将微分体受力向过形心的切向轴投影,建立环 向( j 向)微分体平衡公式: Fj 0,
1 s j t rj 2t rj + + + r j r r
f j 0
第四章 平面问题的极坐标解答 4.1 极坐标中的平衡微分方程
列平衡条件时:(1)应力和体力应分别乘以其作
用面积和体积,才能得到合力;(2)应用了两个基 本假设:连续性假设和小变形假设,这也是其适用的 条件;(3)平衡微分方程表示了平面区域内任一点 的平衡条件;(4)平面应力问题和平面应变问题的 平衡微分方程相同。 极坐标下的平衡微分方程含三个未知数:sr 、sj 、trj 。
由于本构方程是弹性体弹性参数的反映,与坐标系的选择 无关。对于直角坐标系和极坐标系,因为它们都是正交坐 标系,因此两坐标系下的物理方程具有相同的形式。
第四章 平面问题的极坐标解答
对于理想弹性体,将直角坐标系的物理方程中下标作相应的
替换,可得极坐标中平面应力问题的物理方程如下:
4.2 极坐标中的几何方程和物理方程
r 坐标线为直线, j 坐标线为圆弧曲线; r的量纲为L, j 的量纲为1。这些区别将引起弹性力学基
本方程的区别。
第四章 平面问题的极坐标解答 4.1 极坐标中的平衡微分方程
研究对象微分体的选取:
选取夹角为 dj 的两条径向线 段和距离为 dr 的两条环向线段 所围成的微分体 PACB,厚度为 1。
第七章_弹性力学平面问题极坐标系解答
而极坐标系下的应力分量r,,r由( r,)的微分求得,即:
, ,
第2节轴对称问题
2.1轴对称问题的特点
1.截面的几何形状为圆环、圆盘。
2.受力和约束对称于中心轴,因此,可知体积力分量f=0;在边界上r=r0: , (沿环向的受力和约束为零)。
3.导致物体应力、应变和位移分布也是轴对称的:
力的边界条件:
在r = a边界(内径):
r= -qa,r=0
在r = b边界(外径):
r= -qb,r=0
本问题仍为轴对称问题,且体力为零,
可采用前述的应力函数求解方程,也可按位移法求解。
1.按应力函数法求解
按应力函数求解前面已导出应力分量和位移表达式:
, ,
平面应力问题的位移:
,
利用力的边界条件:
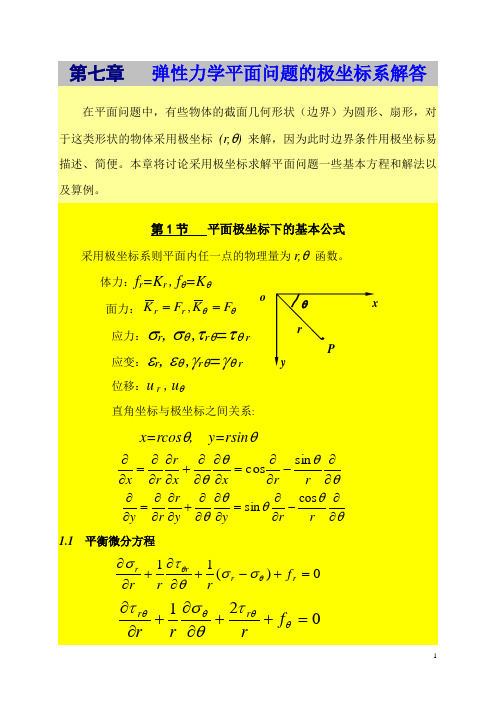
第1节平面极坐标下的基本公式
采用极坐标系则平面内任一点的物理量为r,函数。
体力:fr=Kr, f=K
面力:
应力:r,,r=r
应变:r,,r=r
位移:ur, u
直角坐标与极坐标之间关系:
x=rcos, y=rsin
1.1平衡微分方程
1.2几何方程
, ,
1.3变形协调方程
1.4物理方程
平面应力问题:
, ,
在r = b:r= 0,r= 0, 2Ab+C/b-2D/b3= 0
在次要边界上,
在=0,环向方向的面力为零, 满足。
径向方向的面力 的分布未给出,但给出 的合力
利用圣维南原理
或
由上述方程解出
, ,
其中
代回应力分量表达式
注意:这个应力解在曲梁两端是不能用的。应变和位移可由物理和几何方程导出。
弹性力学 平面问题的极坐标解答2
r 0
由此可见,应变分量也只是r的 函数,与无关,即应变绕z轴对 称
2、位移分量
u r 1 A r [(1 ) 2 (1 3 ) B r E r 2(1 ) B ln r 2(1 )C ]
积分得:
1 A ur [(1 ) (1 3 ) Br E r 2(1 ) Br (ln r 1) 2(1 )Cr ] 平衡微分方程 4—2 极坐标中的几何方程和物理方程 4—3 极坐标中的应力函数与相容方程 4—4 应力分量的坐标变换式 4—5 轴对称应力和相应的位移
4—6 圆环或圆筒受均布压力 4—8 圆孔的孔边、应力集中
4—9 半平面体在边界上受集中力
4—10 半平面体在边界上受分布力
A r 2 B(1 2 ln r ) 2C r A 2 B(3 2 ln r ) 2C r
r r
由此可以看出,应力分量只是r得函数,不 随而变化,且只有正应力,无剪应力
一、轴对称问题的应变和位移
1、应变分量
1 A r [(1 ) 2 (1 3 ) B E r 2(1 ) B ln r 2(1 )C ] 1 A [(1 ) 2 (3 ) B E r 2(1 ) B ln r 2(1 )C ]
1 sin yx ds sin 1 cos 0
r x cos y sin 2 xy sin cos
2 2
同理,由平衡方程:
F 0
2 2
r ( y x ) sin cos xy (cos sin )
o
x
y yx
04弹性力学解题方法

Laplace算子 位移分量表示 的平衡微分方程
G G 2 ui f i 0 (4-3) 1 2 xi G G 2 u f x 0 1 2 x G G 2 v f y 0 1 2 y G G 2 w f z 0 1 2 z
几何方程:
物理方程
1 x E x y 1 y x y E 1 xy xy G
E x x y 2 1 E y y x 2 1
xy G xy
解题思路:
G G 2 ui f i 0 (4-3) 1 2 xi
ui u j n jG x j x i
ui ui
几何 方程 物理 方程
n j ij Fi (4-4)
u v w
ij
ij
优点: 适用范围广,在数值解法中得到广泛应用(有限元)。
q
解:
位移分量:
o
x
Z=h
uv0
1 2 w 4(1 )G
应力分量:
z g( h2 z 2 ) 2q( h z )
x y
1
(q gz )
z (q gz)
z 0 r 0
r
E 1 2(1 ) 1 2 E 1 2(1 ) 1 2
u 2u 2 fr 0 u u w r r r r z 2 w fz 0 2 2 1 z 2 2 2 r r z r
( G ) G 2 ui f i 0 xi
弹性力学:第四章 平面问题的极坐标解答 (3)
属于轴 对称应 力问 题,可 以引用 轴对称 应力问 题的通 解。
σρ
A ρ2
B(1 2 ln
ρ) 2C,
σφ
1 ρ2
B(3
2 ln
ρ)
2C,
(a)
τ ρφ 0.
边界条件是
(σ ρ ) ρr q1, (τ ρφ ) ρr 0, (σ ρ )ρR q2 , (τ ρφ )ρR 0.
轴对称应力问题
§4-5 轴对称应力和相应的位移
轴对称,即绕轴对称,凡通过此轴的任何面均为对称面。
轴对称应力问题:
应力数值轴对称 -- 仅为 r 的函数,
应力方向轴对称 -- τ ρφ τφρ 0.
相应的应力函数 Φ Φ,ρ所以应力公式为:
σ
ρ
1 ρ
dΦ dρ
,
σ
φ
d2Φ d ρ2
,
r 0.
(a)
边界条件
边界条件--应用极坐标时,弹性体的 边界面通常均为坐标面,即:
r 常数,或 常数,
故边界条件形式简单。
导数的变换:
ቤተ መጻሕፍቲ ባይዱ
将对 x, y 的导数,变换为对 r, 的导数:
F (x, y) 可看成是 F (r, ),而 r, 又是 x, y
的函数,即 F 是通过中间变量 r, 为 x, y
ur
1 [(1 ) A 2(1 )Br(ln r 1)
E
r
2(1 )Cr I cos K sin,
(1
3)
Br
(e)
u
4B E
r
H
r
I
sin
K
cos。
其中 I,K — 为 x、y 向的刚体平移,
弹性力学极坐标公式记忆规律
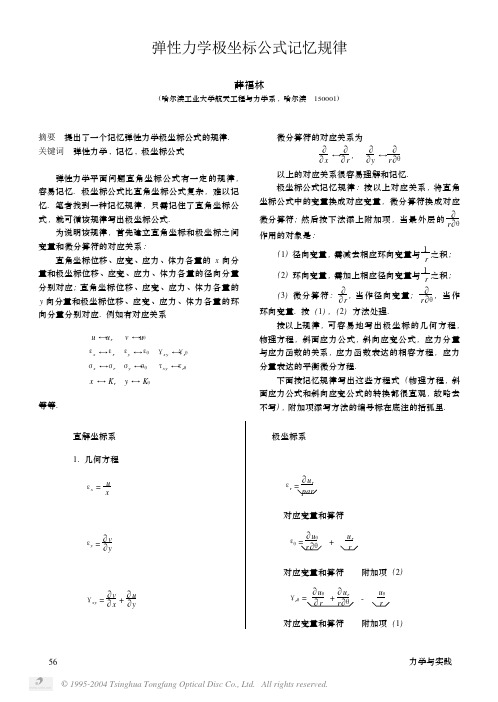
微分算符的对应关系为 5 5 5 5 ∴ , ∴ θ 5x 5r 5y r5 以上的对应关系很容易理解和记忆 . 极坐标公式记忆规律 : 按以上对应关系 , 将直角 坐标公式中的变量换成对应变量 , 微分算符换成对应 微分算符 ; 然后按下法添上附加项 , 当最外层的 作用的对象是 :
弹性力学极坐标公式记忆规律
薛福林
( 哈尔滨工业大学航天工程与力学系 , 哈尔滨 150001)
摘要 提出了一个记忆弹性力学极坐标公式的规律. 关键词 弹性力学 , 记忆 , 极坐标公式 弹性力学平面问题直角坐标公式有一定的规律 , 容易记忆 . 极坐标公式比直角坐标公式复杂 , 难以记 忆 . 笔者找到一种记忆规律 , 只需记住了直角坐标公 式 , 就可循该规律写出极坐标公式 . 为说明该规律 , 首先建立直角坐标和极坐标之间 变量和微分算符的对应关系 : 直角坐标位移 、应变 、应力 、体力各量的 x 向分 量和极坐标位移 、应变 、应力 、体力各量的径向分量 分别对应 ; 直角坐标位移 、应变 、应力 、体力各量的
=
52 52 2 + 5x 5 y2
其中 ,
=
52 5 5 1 5 + + = 转换 r 5r 5 r2 r5θ r5θ
对应微分算符 附加项 ( 3 , 2) 52 52 1 5 2+ 2 2+ r 5r 5r r 5θ
4 . 应力分量表达的平衡微分方程 (σ θ 同τ θ θ) r 同τ rr , σ
2 . 应力分量与应力函数 φ 的关系 ( 忽略体力)
52φ σ x = 5 y2
5 5φ 1 5φ σ r = θ r5θ + r 5 r = 5r 对应微分算符 附加项 ( 3 , 2) 52φ 1 5φ 2 + r 5r r2 5θ
弹性力学有限元第四章 平面问题的的极坐标解答
j r dj
x dr A A'
此项表示:径向位移会引起环向线段的正应变
第四章 平面问题的极坐标解答
§4-2 极坐标中的几何方程和物理方程
极坐标中的几何方程
O
径向线段PA转角 0 环向线段PB转角
j r dj
x P ur dr A P' A'
BB PP b PB u r u r j dj dj u r 1 u r rdj r j
式中第1、2、4项与直角坐标的方程相似。
r r
是由于+r面面积大于-r 面面积引起的
j
r
是由于±j 面在形心点的r 向有投 影。
第四章 平面问题的极坐标解答
§4-1 极坐标中的平衡微分方程
极坐标中的平衡微分方程
Fj 0
dj dj ( j dj )dr cos j dr cos j 2 2 rj ( jr dr )(r dr )dj jr rdj r jr dj dj ( jr dj )dr sin jr dr sin fj rdj dr 0 j 2 2 j
第四章 平面问题的极坐标解答
§4-1 极坐标中的平衡微分方程
极坐标中的平衡微分方程
dj dj d j 1 sin 对前式取 cos 2 2 2
并注意到一阶微量相互抵消,略去 三阶微量,保留到二阶微量,得
r
1 rj r j fr 0 r r j r
Fr 0
( r r dr )(r dr )dj r rdj
r j dj dj ( j dj )dr sin j dr sin j 2 2 jr dj dj ( jr dj )dr cos jr dr cos f r rdjdr 0 j 2 2
物理力学公式记忆法

物理力学公式记忆法物理力学是自然科学中最基础的学科之一,其中包含了许多重要的公式。
为了在学习和应用物理力学过程中能够准确地记忆和运用这些公式,我们需要使用一些有效的记忆法。
本文将介绍一些物理力学公式的记忆法,帮助读者更好地掌握这些公式。
一、公式分类法物理力学中的公式可以根据其研究的对象和量纲进行分类。
按照这个思路,我们可以将物理力学公式分为力的公式、加速度的公式、位移的公式等等。
通过将公式按照一定的规则分类,可以帮助读者更好地理解和记忆这些公式。
以力的公式为例,我们可以将力的公式分为牛顿第一定律公式、牛顿第二定律公式和牛顿第三定律公式等。
对于每个公式,可以列出其表达式、含义以及常见的应用场景,通过这种方式能够使我们更加深入地理解和记忆这些公式。
二、助记词法助记词法是一种通过与公式相关的关键词来记忆公式的方法。
我们可以根据公式中的关键词来构造一些与其相关的词语,通过联想记忆的方式来记忆公式。
以运动方程v = u + at为例,我们可以将这个公式通过记忆助词“My Uncle Ate Apples”来记忆。
利用这个助记词,我们可以迅速回忆起这个公式的表达式和含义。
通过构造有趣、生动的助记词,能够帮助我们更加轻松地记忆和应用公式。
三、图示法图示法是一种通过绘制图形来记忆公式的方法。
对于一些复杂的公式,我们可以通过将其转化为图形的形式来记忆。
这样做的好处是可以通过视觉记忆来帮助我们更好地记忆公式。
以牛顿第二定律F = ma为例,我们可以绘制一个图示,将物体、力和加速度用箭头表示,从而更清晰地理解和记忆这个公式。
图示法可以使公式的记忆更具象化和直观化,提高我们对公式的理解和应用能力。
四、实例应用法实例应用法是一种通过举例应用公式的方法来记忆公式。
通过将公式应用于具体的实例中,可以使我们掌握和记忆公式的过程更加深入和直观。
以动能公式K = 1/2mv^2为例,我们可以通过举例应用公式来记忆和理解。
比如,可以给出一个小球从山坡上滚落的实例,通过计算小球的重量、速度和质量,应用动能公式来计算小球的动能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:1671-9662(2007)03-0073-02
弹性力学极坐标公式的记忆规律
张长平,余东明
(平顶山工学院,河南平顶山467001)
摘 要: 利用直角坐标系与极坐标系相关量的对应关系及微元体在两个坐标系中的不同特点,提出弹
性力学极坐标公式的记忆规律。
关键词: 弹性力学;极坐标公式
中图分类号: O343.1 文献标识码:A
0 概述
弹性力学平面问题直角坐标公式有一定规律性,容易记忆。
在掌握直角坐标系中的下标记号法后,也非常方便地推广到空间问题的直角坐标公式中。
但极坐标公式比直角坐标公式复杂,学生学习起来不易掌握。
笔者通过教学实践,采用两坐标系之间相关量的对比和找出极坐标条件下微元体产生附加项的原因,去寻求极坐标公式的记忆规律,使学生较方便地掌握了极坐标公式。
1 两种坐标系下物理量对应关系
为了说明极坐标公式的记忆规律,首先建立直角坐标和极坐标之间变量和微分算符的对应关系。
直角坐标系中的位移、应变、应力、体力各量的x 向分量和极坐标系中的位移、应变、应力、体力各量的径向分量分别对应;直角坐标系中的位移、应变、应力、体力各量的y 向分量和极坐标系中的位移、应变、应力、体力各量的环向分量分别对应。
对应关系见表1。
表1 两种坐标系下物理量对应关系
坐标系位移应变体力
应力
直角坐标系
u v εx εy γxy F x F y σx σy τxy 极坐标系
u p u φ
ερ εφ γρφ
F ρ F φ
σρ σφ τρφ
2
两种坐标系下一阶微分算符的对应关系图1 直角坐标系微元体
一阶微分算符的对应关系见表2
表2 两种坐标系下一阶微分算符的对应关系
坐标系一阶微分算符直角坐标系 x
y 极坐标系
ρ ρ φ
对于第二个微分算符的对应关系可解释为,由于角度φ的量纲是1,为了保证前后量纲的一致性,对角度的一阶微分必须除以ρ。
3 两种坐标系条件下所取微元体的不同特点
直角坐标下的微元体是一矩形,见图1,相对的两边平行且等长。
微元体的这一特征,使得平衡微分方程、几何方程,公式简洁,意义鲜明,便于记忆。
极坐标下的微元体是圆环的一部分,两条环向线PB 与A D 平行但不等长,两条径向线PA 与BD 等长但不平行,见图2。
微元体的这一特征,使得在推导平衡微分方程、几何方程过程中比直角坐标系的对应公式增加部分附加项。
3.1 平衡微分方程对比见表3收稿日期:2007-04-20
第一作者简介:张长平(1954-),男,湖南澧县人,平顶山工学院高级讲师,主要从事力学教学研究。
第16卷第3期2007年5月 平顶山工学院学报Journal of Pingdingshan Institute of Technology
Vol .16No .3
May .2007
表3 两种坐标系下平衡微分方程对比
坐标系平衡微分方程
直角坐标系 σx x + τyx
y +f x =0 τxy x + σy
y +f y =0极坐标系
σρ ρ+ τφρρ φ+σρ-σφρ
+f ρ=0 τρφ ρ+ σφρ φ+2τρφρ
+f φ=0 注:1.σρ/ρ是由于环向线不等长引起,-σφ
/ρ是由于径向线不平行引起。
;2.τρφ/ρ是由于环向线不等长引起,τφρ
/ρ是由于径向线不平行引起,因为切应力互等,二者合为一项。
3.2 几何方程对比见表
4
图2 极坐标系微元体
表4 两种坐标系下几何方程对比
坐标系几何方程直角坐标系εx = u
x
εy = u
y
γxy =
v x + u
y
极坐标系
ερ=
u ρ ρεφ=
u φρ φ+u ρργρφ= u φ ρ+ u ρρ φ-u φ
ρ
注:1.u ρ/ρ是由于径向位移引起环向线的线应变。
2.-u φ/ρ是由于环向位移引起的切应变。
3.3 相容方程
在常体力条件下用应力函数表示的相容方程:■2Υ=0。
在直角坐标系下■=
2 x 2+
2
y 2 在极坐标系下■= 2 ρ2+ ρ ρ+
2ρ2 φ
2。
其中对应关系为: 2 x 2 2 ρ2; 2 y 2 ρ ρ+
2ρ2 φ
2。
有了以上对应关系,就不难写出两个坐标系下应力分量(无体力条件下)的关系,见表5。
通过以上的分析、对比与联系,使学生能够很快地掌握极坐标公式。
表5 两种坐标系下应力分量关系
坐标系应力分量
直角坐标系σx =
2
Υ y 2σy =
2
Υ x 2τxy = 2
Υ x y
极坐标系
σρ= Υρ ρ+ 2Υρ2 φ
2
σφ= 2Υ ρ
2
τρφ= ρ Υρ φ
参考文献
[1]徐芝纶.弹性力学简明教程[M ].北京:高等教育出版社,2002.[2]杨桂通.弹性力学[M ].北京:高等教育出版社,1998.
Memory law of radial coordinates formula of elastic mechanics
ZHANG Chang -ping ,YU Dong -ming
(Pingdings han Ins titute o f technology ,Pingdingshan 467001,China )
A bstract :Utilizing rectangular coordinates system and relevant corresponding relation of polar coordinates system and different character -istics of micro unit of the t wo systems ,the author proposed the memory law of the radial coordinates formula of elastic mechanics .Key words :elastic mechanics ;formula of palar corrdinates
74 平顶山工学院学报 2007年5月。