deviation固件说明书解析
VaultGard Firmware升级说明说明书

VaultGard Firmware Upgrade ProcedureDownload the latest VaultGard firmware from the Network Protector web site at:/nwp, and save it to your hard drive.When upgrading to the latest VaultGard firmware from version 1.1.11 or later, skip the following instructions (a to d) and start with step 1 below. It is always a good idea to save the VaultGard configuration prior to upgrading firmware.Important steps to follow before starting the VaultGard firmware upgrade from 1.0.x:a. It is critical to follow the steps provided exactly as stated and to wait as specified on power up. Failureto do so may cause VaultGard to stop working. Also note that Firmware version 1.1.x will not workproperly with Internet Explorer 6. Please use IE7 or IE8.b. All configuration information will be lost during the firmware upgrade from 1.0.x to 1.1.x. Copy anyconfiguration information you will need from your existing 1.0.x VaultGard to a Word file for reference.You can select data on the VaultGard web pages, copy it, and paste it into a Word file if desired. Be sure to record your network settings!c. You must use the serial port cable for this upgrade, as the static IP address and other networkconfiguration information will be erased. It is only the initial firmware upgrade from version 1.0.x to1.1.x that will cause a loss of the IP address and associated network information.d. Before you load the new firmware, please go to the VaultGard Firmware web page and click <Reset> toclear the current configuration information.New Firmware upload:1. Browse to the VaultGard Firmware web page, and select the Control tab.2. Click <Upload Firmware> and select the firmware file 1.1.x.bin from your hard drive.3. The upload and update will take 5 to 10 minutes. The following messages will be displayed:“Uploading...do not change page or close browser”, followed by“Uploaded file, commencing update...”4. When the new firmware is loaded a pop-up message will report “Successful update”. Click <OK>, and the web page will transition back to the About tab, with the Status “New firmware applied, please reboot to use”5. Select the Control tab and click the <Reboot> button. Click <OK> to confirm the reboot.6. Wait about 5 minutes for VaultGard to reset and register the new 1.1.x firmware. Progress can be monitored on the serial port. Do not try to do any configuration until all the activity has completed on the serial port.If updating from firmware version 1.1.11 or later, the update process is complete at this step. Continue with step 7 when updating from firmware versions prior to 1.1.11.7. Using the serial port interface, press <Enter> to begin configuration. Select “Clear all config data” to reset the configuration from the older firmware database. This will cause VaultGard to reboot.8. Once again wait until all the activity has completed on the serial port.9. Now you may set the VaultGard IP address via the serial port.10. You may need to cycle power to VaultGard to get it to boot properly with the new firmware and IP address.11. Wait 1 to 2 minutes for VaultGard IP address to be registered, and then open Internet Explorer to the VaultGard IP address and log in.12. Browse to the Date/Time web page under VaultGard Configuration.•Click the Locale tab, select the correct time zone, and then click <Apply Settings>.•Click the Synchronization tab to select the time source for your network. If there is no NTP server or SCADA time server available select <Use Manual>.•Verify the correct time in the black rectangle on the right side of the header.。
DEVO系列遥控器在线升级使用手册中文
使用手册如何使用Devention DfuSe USB升级工具―――――――――――――――――――――――――――――――――――――――――――――――――――――――――――――1. 目录1. 目录 (1)2. 介绍 (1)3. 系统要求 (2)4. 如何进入程序升级 (3)4.1 devention DfuSe USB升级工具安装 (3)5. 用户使用界面详解 (7)5.1 固件升级界面 (7)5.2 固件升级操作 (9)5.3 配置升级界面 (13)5.4 配置升级操作 (14)5.5 库文件升级界面 (18)5.6 库文件升级操作 (19)5.7 重要提示 (26)6. 修正历史 (26)2. 介绍devention DfuSe USB升级包分为三类:固件、配置、库文件。
“固件”是指基于控制器的程序文件;“配置”是指各个模型模块的配置参数;“库文件”是指主要的图标、语言包以及语言文本。
本工具主要用于升级devention 2.4G遥控器产品的固件、配置和库文件。
本文详细描述如何安装devention DfuSe USB的驱动,以及如何使用此升级工具。
devention DfuSe USB升级包可在官方网站下载。
3. 系统要求为了在Windows操作系统上使用devention DfuSe USB升级工具,您必须在电脑上安装常用的Windows版本,如Windows 98SE,Millennium,2000,XP,或VISTA。
您可以在桌面上右击“我的电脑”,然后点击弹出菜单的“属性”,查看Windows操作系统的版本。
在“系统属性”的“常规”中显示操作系统类型。
如图1。
图1:系统属性对话框4. 如何进入程序升级4.1 devention DfuSe USB升级工具安装l软件安装运行DevoDfuSe_V1.0_Setup.exe 文件:安装向导将指导您安装Devention DfuSe USB 升级工具。
DeviceDrive Wi-Fi模块说明书
U S E R M A N U A LDeviceDrive clickDeviceDrive click is a complete Cloud-on-M odule solution with Wi-Fi functionality and an integrated PCB antenna. The onboard WRF01-M 24A module comes preloaded with DeviceDrive firmware.To our valued customersI want to express my thanks to you for being interested in our products and for having confidence in Mikroelektronika.The primary aim of our company is to design and produce high quality electronic products and to constantly improve the performance thereof in order to better suit your needs.Nebojsa MaticCEOTable of ContentsIntroduction 4 1. Set up your product in the cloud 59SimulatortheClient2. InstallingDeviceDrive10clickup3. Set103.1. Connect DeviceDriveclick3.2 Connecting to PC over USB/UART converter113.3 Setting up DeviceDrive click with LinkUp 134. Device Simulator 15polling 16 Data4.1.5. Advanced 176. Upgrade demo board 19IntroductionWRF01 is a Wi-Fi (802.11B/G/N) module from DeviceDrive. By using the DeviceDrive click, you can connect it to your PC and simulate real device behaviour, to learn how the device works and how it communicates to the cloud and to the app.This document introduces the WRF01 Client Simulator and aims at giving you a quick start for developing with the DeviceDrive click. The program communicates with the DeviceDrive click trough the serial ports and is suited for acting as a client and for prototyping IoT-Products.The following sections give the steps how to get started:∫ Section 4: Set up your product in the cloud∫ Section 5: Installing the software∫ Section 6: Set up DeviceDrive click∫ Section 7: Simulate IoT device∫ Section 8: Send custom DeviceDrive click messages∫ Section 9: Upgrading your WRF011. Set up your product in the cloudIn order to use the DeviceDrive click with the DeviceDrive cloud and the client simulator you need to sign up on the DeviceDrive management portal. If you already have an account, you can just sign in and create a new product on your account. Goal: Get a valid product key to use with this tutorialProcedure for signing up:1.S ign up at https://2.P ress email signup3. E nter your email address and press“Send verification code”4. Y ou will receive an email with your verification code. Copy this code to your clipboard and paste into the registration form. Then click “Verify code”.5. E nter your preferred password and your name.Then press “Create”.6. R egister your company name. This is the name of your DeviceDrive management account. It can contain several users and several products.7. R egister your test product. Enter a name for your product and select “Internal agent”. Then copy the product key to your clip board and press“Save”.8. P aste the product key somewhere (e.g. Notepad) so that you can use it later.2. Installing the Client SimulatorIf your Antivirus complains that the software package is not signed, please ignore and run the install anyway. Download the software from https:///downloadsRun the installer. This will install the software and add the examples folder to the program folder. After the install is finished, you can launch the program from the start menu or the desktop icon.3. Set up DeviceDrive clickThis section describes how to connect your DeviceDrive click to the network and configure your product key.3.1 Connect DeviceDrive clickConsidering that DeviceDrive click is a board withUART interface you will need additional board to make it working. There are severals ways that you can put in use your DeviceDrive click board.Option 1 – click USB adapter (or any USB to UART converter)Option 2 – clicker 2 (or any other development system with mikroBUS™ socket). 2 13.2 Connecting to PC over USB/UART converter Array Your computer will recognize the device, and designate a COM port for it. As soon this is done, will see the COM port in the dropdown (1) in the picture above.If the connection is successful, the color of the Connection Status Indicator (2) will change from Red to Green. The Host port communication window will give you the exact communication log between the Simulator and WRF01. Use this to learn about how the WRF01 behaves in a normaloperating cycle.It is possible to mix up the host port and the log port in the two windows. It is recommended to plug in the HOST port first, and then select the port in the host communication window before connecting the log port.When DeviceDrive click is connected, enter the product key (the one from the management portal) in to the field marked “Product Key” (3). If you want the device online right away enter the network ssid and password in their fields. If your product key is defined as a “Forwarding product”, you can enter these right away, and start sending data, but if you have an “Internal product” and wish to use the mobile app SDK’s, you should LinkUp using the app. In addition, you can attach the log port to your computer with an USB mini cable. This will also register as a COM port in your system. In the “Log port Output” window, select the new COM port. Check the status indicator on the right-hand side to see that the connection is successful.When you are ready, press “Init” (4). This will initiate the WRF01. You should see the message “Response OK” in the Serial output window, and if you attached the Log port, you should see the WRF01 internal workings while connecting to your access point (router).Hold your mouse over the quick commands to get more information about them.3.3 Setting up DeviceDrive click with LinkUpLinkup is only required if your device is an “Internal product” in the DeviceDrive system.To make the DeviceDrive click ready for LinkUp, use the “Show Device” (1)button to enable the local AP.You can also use SmartLinkup to initiate the SmartLinkup procedure. This procedure lets the user connect the device withouthaving to use the Soft AP.The DeviceDrive Playground App is available on Apple Store and Android Play. When you are using the LinkUp procedure, the SSID and password for your network is sent, along with the security token for your device. This is the reason that you need to use the LinkUp system when working with Internal Products. For more information about how to use the DeviceDrive Playground app and the internal product, please see this video and the documentation.The screenshots below show how the Playground app lets you link up your new device and show the simulated data from the device simulator.The device state is shown in the app after the introspect and current state have been sent to the cloud. The next section describes how to simulate device behavior.4. Device Simulator Array On the top of the DeviceDrive WRF01 Client Simulator, you will find the Device Simulator tab. This tab gives you the opportunity to test the introspection functionality and lets you integrate the DeviceDrive click with an app with our SDK or the DeviceDrive Playground app.Before you can start simulation, please make sure that you followed the steps in chapter Feil! Fant ikke referansekilden., 6.1 and 6.2.To be able to send a status update, first press the “Send Introspect” (1) button. This sends a message to the cloud with the “capabilities” of your product. See the Serial specification documentation or this video about more information about the introspection document. This is a prerequisite for the APP you’re using to control your device.When the introspection document is sent you can click the temperature or light controller to send devicedata to the cloud. The app will automatically updatewith the new device data.4.1 Data pollingapp to the device. If you are using the DeviceDrivePlayground app, try to flip the button marked“Light”.Press the “Poll” (1) button to read pending statusupdates from the app. You can check “Auto poll” tolet this happen automatically at the given interval.The simulated state will be updated according tothe received messages.∫ Polling requires SSL to be enabled on the WRF01 (versions below 4.0). Please press “Init” again if the system does not receive messages.∫ Version 4.0 supports MQTT, so if the WRF01 is already connected to the server, the messages from the app will appear asynchronously without polling.∫ There is no queue system in this software, so if you try to send or receive a lot of messages in rapid succession, you might experience the “System busy” error message. To resolve this, wait for the WRF01 to complete the current operation. This can be seen in the Log window. In a real application you can use our client SDK source code where a queue is implemented.5. Advanced Array Use the Advanced screen to send custom messages and choose from a set of predefined message templates.This screen is suited for those who wish to tweak the messages sent to the server, or to test the whole range of the available commands for the WRF01. By default, the two drop-down menus should point to the folder that came bundled with the installation. To use the WRF01 commands, select “wrf01 commands” (1) in the first dropdown. In the second, you will be able to see the available commands. These match the “Serial specification documentation” and you can enter, or change the properties / values in the text field below.Before pressing send, make sure that there is an EOT character at the end of your transmission. Itwill be marked with a small rectangle after yourlast bracket.If there is no EOT char, press the “Add EOT” button.command to the device.In addition to all of the available WRF01 commands,this software comes with some examples ofintrospection and status messages you can try.In the text field you can add your own text or messagesand send to the WRF01. If you are using your owncloud and require special messages, this is where youcan send them.The “Browse” (2) button lets you select the base folderto show template messages from.This software strips your message of all <CR> <LF> characters before sending them to the WRF01. In a real-world application, do not use these characters in a WRF01 command. They have to comply exactly with the serial specification. If a command does not start with exactly {"devicedrive": the message will be interpreted as a cloud message transfer, and not a WRF01 command.6. Upgrade demo board The upgrade pane lets you easily experiment with upgrading and downgrading your WRF01 module on DeviceDrive click.Notice that the upgrade itself has to be defined in the management portal.Perform each of the steps manually or just press “Do all” (1) to upgrade automatically (but you still need to define the upgrade in the managementportal).Define the upgrade in the management portal (click the link in point 1) (2).Click each of point 2-4 or just press “Do all” to run automatically.You should see that the current version field updates to the selected version (3).DISCLAIMERAll the products owned by MikroElektronika are protected by copyright law and international copyright treaty. Therefore, this manual is to be treated as any other copyright material. No part of this manual, including product and software described herein, may be reproduced, stored in a retrieval system, translated or transmitted in any form or by any means, without the prior written permission of MikroElektronika. The manual PDF edition can be printed for private or local use, but not for distribution. Any modification of this manual is prohibited. MikroElektronika provides this manual ‘as is’ without warranty of any kind, either expressed or implied, including, but not limited to, the implied warranties or conditions of merchantability or fitness for a particular purpose. MikroElektronika shall assume no responsibility or liability for any errors, omissions and inaccuracies that may appear in this manual. In no event shall MikroElektronika, its directors, officers, employees or distributors be liable for any indirect, specific, incidental or consequential damages (including damages for loss of business profits and business information, business interruption or any other pecuniary loss) arising out of the use of this manual or product, even if MikroElektronika has been advised of the possibility of such damages. MikroElektronika reserves the right to change information contained in this manual at any time without prior notice, if necessary.HIGH RISK ACTIVITIESThe products of MikroElektronika are not fault – tolerant nor designed, manufactured or intended for use or resale as on – line control equipment in hazardous environments requiring fail – safe performance, such as in the operation of nuclear facilities, aircraft navigation or communication systems, air traffic control, direct life support machines or weapons systems in which the failure of Software could lead directly to death, personal injury or severe physical or environmental damage (‘High Risk Activities’).MikroElektronika and its suppliers specifically disclaim any expressed or implied warranty of fitness for High Risk Activities.TRADEMARKSThe MikroElektronika name and logo, mikroC, mikroBasic, mikroPascal, Visual TFT, Visual GLCD, mikroProg, Ready, MINI, mikroBUS™, EasyPIC, EasyAVR, Easy8051, Click boards™ and mikromedia are trademarks of MikroElektronika. All other trademarks mentioned herein are property of their respective companies.All other product and corporate names appearing in this manual may or may not be registered trademarks or copyrights of their respective companies, and are only used for identification or explanation and to the owners’ benefit, with no intent to infringe.The FTDI Chip® and Windows® logos and product names are trademarks of FTDI Chip and Microsoft® in the U.S.A. and other countries.Copyright © 2019 MikroElektronika. All Rights Reserved.If you want to learn more about our products, please visit our website at If you are experiencing some problems with any of our products or just need additional information, please place your ticket at /supportIf you have any questions, comments or business proposals, do not hesitate to contact us at*****************Designed by Mikroelektronika Ltd.。
MGate MB3660系列固件发布说明书
Firmware for MGate MB3660 Series Release NotesSupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Vulnerability issues (higher level or above) have been fixed, following a Nessus and Defensics scan.• Supports MXconfig v2.6 and MXview v3.1.8.• Enhanced the System Log display.• Strengthened the TLS cipher suite for security enhancement.• Enhanced MOXA commands under the account login process.• Adjusted Telnet default settings from enable to disable.• Disabled unsecure TLS 1.0 and TLS 1.1.• Enhanced Accessible IP List feature.• Added CSRF attack protection for login webpage.• Serial parameters might have been incorrect when switching between ASCII and RTU modes.• Fixed the incomplete display in the web console.• Fixed SNMPv3 issues.• Fixed the MGate's failure to get an IP address under DHCP mode.• Fixed https connections that might have caused the web service to stop working.EnhancementsN/AN/AN/ANew FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/AN/AEnhancementsN/AN/ASupports MGate MB3660I-8-2AC and MGate MB3660I-16-2AC new hardware version v1.1.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Accessible IP List supports denying Web/Telnet console access.• In Agent mode as a Modbus ASCII master, MGate would hang after plugging and unplugging a serial cable.EnhancementsN/AMGate MB3660-8-J-2AC, MGate MB3660I-16-2AC, MGate MB3660-16-J-2AC, MGate MB3660-8-2AC, MGate MB3660-8-2DC, MGate MB3660I-8-2AC, MGate MB3660-16-2AC, MGate MB3660-16-2DC• Supports security features based on IEC-62443.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Enhanced the complexity of token generation to protect against CSRF attacks.• Enhanced the complexity of the key for password encryption in the web console login process.• Encrypts sensitive information in exported configuration file.• Enhanced the display of auto detection results in MODBUS transparent mode.• Firmware version check problem when upgrading firmware for MGate MB3660I-16-2AC, MB3660-8-J-2AC, and MB3660-16-J-2AC.• Modbus RTU communication would fail if FIFO was disabled.• The FIFO setting would not be activated after clicking the “Submit” button.• Stack-based buffer overflow issue in web console which may cause web service corruption.• Challenge ID generation problem which may cause web console login failure.EnhancementsN/AMGate MB3660-8-J-2AC, MGate MB3660I-16-2AC, MGate MB3660-16-J-2AC, MGate MB3660-8-2AC, MGate MB3660-8-2DC, MGate MB3660I-8-2AC, MGate MB3660-16-2AC, MGate MB3660-16-2DCN/ANew FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Improved security of the TCP sequence number.• Improved beeper behavior in DHCP mode.• Modbus RTU diagnose error in agent mode.• Initial error relay state when powered on.EnhancementsN/AMGate MB3660-8-J-2AC, MGate MB3660I-16-2AC, MGate MB3660-16-J-2AC, MGate MB3660-8-2AC, MGate MB3660-8-2DC, MGate MB3660I-8-2AC, MGate MB3660-16-2AC, MGate MB3660-16-2DC• Supports MGate MB3660I-16-2AC, MGate MB3660-8-J-2AC, MGate MB3660-16-J-2AC models.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• The Modbus master in agent mode supports up to 256 commands for each serial port.• Supports multi-master in "routing by IP address" and "routing by TCP port" modes.• Supports sorting of commands in the I/O mapping page.• Supports auto internal memory assign in the command page.• Supports Modbus slave ID 255 in transparent mode.• User password and SNMP community name may be exposed by a buffer overflow issue.EnhancementsN/AMGate MB3660-8-2AC, MGate MB3660-8-2DC, MGate MB3660I-8-2AC, MGate MB3660-16-2AC,MGate MB3660-16-2DC• Supports Auto Device Routing in Modbus transparent mode.• Supports Modbus TCP traffic logs.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Bug in Modbus Master mode which may cause the MGate to reboot under some conditions.EnhancementsN/AMGate MB3660-8-2AC, MGate MB3660-8-2DC, MGate MB3660I-8-2AC, MGate MB3660-16-2AC,MGate MB3660-16-2DCN/ANew FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Initial delay issue which would stop Modbus communication.EnhancementsN/AMGate MB3660-8-2AC, MGate MB3660-8-2DC, MGate MB3660I-8-2AC, MGate MB3660-16-2AC,MGate MB3660-16-2DCN/ANew FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Fix the algorithm which may cause Modbus transparent mode to stop communication.• Serial port 13 interface initialization problem.• Modbus traffic exceptions in the serial port are not handled well, which might cause the serial port to stop transmitting data.• When the "Read memory address" is greater or equal to 8192 for the "01 - Read Coils" or "02 -Read Discrete Inputs" functions, data will be written to the wrong internal memory address.EnhancementsN/AMGate MB3660-8-2AC, MGate MB3660-8-2DC, MGate MB3660I-8-2AC, MGate MB3660-16-2AC,MGate MB3660-16-2DCN/ANew FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/AN/AEnhancementsN/AMGate MB3660-8-2AC, MGate MB3660-8-2DC, MGate MB3660I-8-2AC, MGate MB3660-16-2AC,MGate MB3660-16-2DC• First release.New FeaturesN/AN/A。
意法半导体DFUSe USB设备固件升级入门说明书
UM0412User manualDfuSe USB设备固件升级意法半导体扩展入门引言本文档介绍了演示用户界面,该界面专为介绍STMicroelectronics设备固件升级库的开发而设计。
该库的描述(包括其应用编程接口)包含在“DfuSe应用编程接口”文档中,并随DfuSe软件一起安装。
2019年3月Doc ID 13379 Rev 1 [English Rev 4]1/22目录UM0412目录1入门指南 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1系统要求 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2演示程序的组成部分 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3DfuSe演示程序安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3.1软件安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3.2硬件安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62DFU文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123用户界面说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.1DfuSe演示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2DFU文件管理器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.1“想要执行”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.2“文件生成”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2.3“文件提取”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174分步流程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.1DfuSe演示步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.1.1如何上传DFU文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.1.2如何下载DFU文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2DFU相关文件生成步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.2.1如何从S19/Hex/Bin文件生成DFU文件 . . . . . . . . . . . . . . . . . . . . . . . . . . 204.2.2如何从DFU文件提取S19/Hex/Bin文件 . . . . . . . . . . . . . . . . . . . . . . . . . . 20 5版本历史 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212/22Doc ID 13379 Rev 1 [English Rev 4]UM0412表格索引表格索引表1.“DfuSe演示”对话框说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14表2.“文件生成”对话框说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16表3.“Multi bin injection”对话框说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17表4.“文件提取”对话框说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18表5.文档版本历史 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21表6.中文文档版本历史. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Doc ID 13379 Rev 1 [English Rev 4]3/22图片索引UM0412图片索引图1.系统属性对话框. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5图2.选择安装位置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7图3.驱动选择选项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8图4.驱动选择. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9图5.从磁盘安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10图6.进度消息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10图7.警告消息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11图8.安装完成. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11图9.“DfuSe演示”对话框. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13图10.“编辑选项字节”对话框. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15图11.“想要执行”对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15图12.“生成”对话框. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16图13.“Multi bin injection”对话框. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17图14.“提取”对话框. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 4/22Doc ID 13379 Rev 1 [English Rev 4]UM0412入门指南Doc ID 13379 Rev 1 [English Rev 4]5/221入门指南1.1 系统要求为了在Windows 操作系统上使用DfuSe 演示程序,PC 上的Windows 必须是较新的版本,例如Windows 98SE 、Millennium 、2000、XP 或VISTA 。
deviation固件说明书解析
DEVIATION说明书第一版前言年初购入devo10,那个论坛成为神控的遥控器。
神控处了这个控的硬件可圈可点外,最重要的一点就是刷入deviation(官网,英文的)这个固件后兼容dsm2等多种主流的制式,实现一控多种接收共用。
而且其开放的平台,能够不断升级增加功能,更有suv等大大的不断奉献,至此deviation 版本走了3.1版,链接/thread-241130-1-1.html感谢各位模友大大的无私奉献,我有幸用上这个神器。
经过一番专研,翻阅说明书后终于大概了解如何设置和运用,deviation的自由度很高,各个通道均可以自定义,让你打造属于自己的控,用起来随心所欲。
里面的混控器是属于底层的混控,自由度很高,不过的确需要一段时间来理解,如果学会了会觉得很好用的,想怎混就怎混。
由于官方说明书是英文的,而且不是说得很明白,加上经常有模友问及如何设置,于是本人萌生出写一下中文说明书的念头,再加点应用例子,务求各位模友更易明白上手,而且通过大家的讨论还能加深本人对这个固件的认识,达到共同进步的目的。
一下都是本人自己的认识跟见解,如有问题请提出来大家切磋讨论。
hilitiQ群:2954863552013年8月22日主界面这个是开机后的主界面,在这里吐槽一下我见过的devo10屏幕贴上都是有灰的,难道厂里贴膜的那个车间就在矿里?至少这一点学一下天地飞吧,出厂膜漂亮得很。
以下是菜单设置,首先是主菜单,这个没什么好说的,很简单明白通用模式进入模型设置,如果之前接触过遥控的话,这些名词也是很清楚明白的,如果还没有搞明白的话,潜水去吧骚年~~好了,现在进入模型设置里面的模型设置菜单(控上是这样写的,不要怪我),第一个模型文件那里,看到黑色部分左右会有箭头的是可以进行左右选择,这里会有读取,复制,模板,重置4个选项。
读取完后不用重启就可以马上工作了。
复制就是把现有模型设置拷贝到另一个模型文件,模板是控自带的设置模板,里面已经有一些预先调好的参数,重置就是格式化~~这个模型文件恢复出厂设定模型类型那个选项可以选择固定翼跟直升机,如果选择直升机的话可以按ent 进入进行斜盘设置跟斜盘的混控比率调节功率调节,越大就越远(傻子都懂),原厂最大好像是100mw,华科尔提供的小日本版本固件的最大10mw。
GALEEDEVO7E固件刷机指南
GALEEDEVO7E固件刷机指南GALEE DEVO7E 是我为华科尔DEVO7E 遥控器编写的中⽂固件,之所以写这个固件,是为了弥补官⽅固件限制功率,⽽DEVIATION 固件⼜没有7E 的中⽂版本。
当然,固件的操作⽅式完全按照我⾃⼰对模型的理解来设计,可能与市⾯上现有的遥控器有所不同,也许会引起您的使⽤不适,请⽂明评价。
本固件的编写,⼤量使⽤了DEVIATION 的源码,我的最主要⼯作是重写了整个⽤户操作界⾯,使得固件体积⼤⼤缩减,⾼频头、U 盘这两部分代码沿⽤了DEVIATION 的开源成果。
同时,根据GPL 协议,GALEE 固件也是开源的,源码下载将另⾏提供。
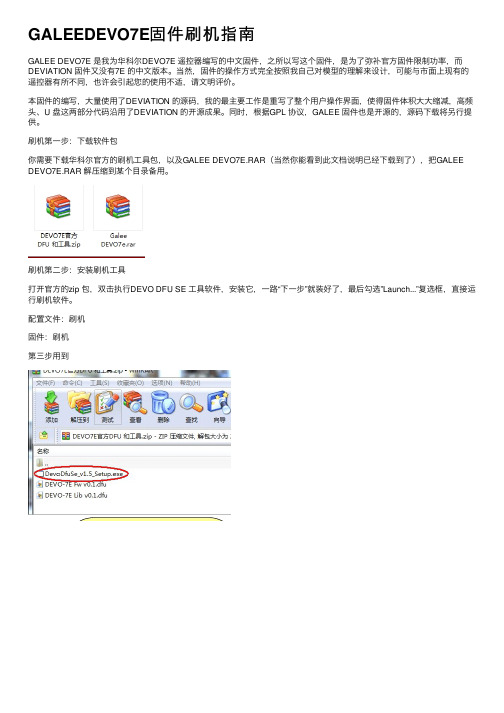
刷机第⼀步:下载软件包你需要下载华科尔官⽅的刷机⼯具包,以及GALEE DEVO7E.RAR(当然你能看到此⽂档说明已经下载到了),把GALEE DEVO7E.RAR 解压缩到某个⽬录备⽤。
刷机第⼆步:安装刷机⼯具打开官⽅的zip 包,双击执⾏DEVO DFU SE ⼯具软件,安装它,⼀路“下⼀步”就装好了,最后勾选”Launch...”复选框,直接运⾏刷机软件。
配置⽂件:刷机固件:刷机第三步⽤到刷机第三步:刷将你的遥控器⽤USB 线接上电脑(标准MINI USB 线都可以),然后按住“遥控器的EXT 键”打开“遥控器的电源”。
电脑会提⽰安装驱动程序等等,很快就装好了,这时候刷机软件的设备列表会显⽰“STM Device in DFU Mode”,按下图步骤操作。
点了"Upgrade”以后还有个确认过程,点“是(Y)”,然后就开始刷了1.这⾥亮了2.点这⾥浏览选择⽂件3.这个提⽰表明固件包没错 4.确认⼀下是GALEE 固件5.⼤胆点下去吧,反正这控便宜!等看到这个绿⾊的提⽰,意思是“升级成功”,就说明刷机完成,接着进⼊下⼀步操作。
刷机第四步:格式化遥控器不要拔掉遥控器上的USB线,关掉遥控器的电源,然后按住“遥控器的ENT键”打开“遥控器的电源”,可以看到遥控器的屏幕上显⽰⼀个USB的图标(此处偷懒不截图),电脑上则开始安装驱动,最后出现⼀个U盘,容量是2M左右。
DeviceNet Adapter 22-COMM-D 固件 v1.011 发布说明书
Release Note22-COMM-D DeviceNet Adapter Firmware v1.011This release note describes major revision 1, minor revision 11 of firmware for 22-COMM-D DeviceNet adapters.IntroductionThe following information is included in this document: EnhancementsThis section describes the enhancements provided in this revision of firmware:•Improved the reliability of the DSI communication between the adapter and the drive(s).•Improved the reliability of fragmented explicit message transactions on the network.Corrected AnomaliesThis section describes the anomaly corrected in this revision of firmware:•In Multi-Drive mode, corrected an issue with the integrity of the I/O data transferred between the network and the drive.For information about:See page:Enhancements 1Corrected Anomalies 1Determining Firmware Revision 2Firmware Flashing 4Restrictions 7Compatible Revisions 8Rockwell Automation Support 8Product Satisfaction Return 8222-COMM-D DeviceNet Adapter Firmware v1.011Determining Firmware Revision This section describes procedures to determine the firmware revision of your 22-COMM-D DeviceNet adapter.Using the Optional, External LCD HIM (22-HIM-**)22-COMM-D DeviceNet Adapter Firmware v1.0113Using DriveExplorer Lite/Fullunch DriveExplorer and go online (via 1203-USB or 22-SCM-232converter) with the drive that is connected to the adapter.2.In the DriveExplorer treeview, click on 22-COMM-D DeviceNetModule as shown in Figure 1.3.Click the information icon to display the adapter’s properties screen.4.The “Revision:” field shows the present revision (for example, 1.010) ofthe adapter firmware.Figure 1 Information Icon in DriveExplorer WindowTIP: When clicking on the 22-COMM-D adapter using version 5.01 orhigher DriveExplorer Lite/Full, the adapter firmware revision is also shownin the right pane of the DriveExplorer window.Step 4422-COMM-D DeviceNet Adapter Firmware v1.011Using DriveExecutive unch DriveExecutive and go online with the drive that is connected to the adapter.2.In the DriveExecutive treeview, click on 22-COMM-D as shown in Figure 2.3.Click the information icon to display the adapter’s Properties screen.4.The “Revision:” field shows the present revision (for example, 1.010) of the adapter firmware.Figure 2 Information Icon in DriveExecutive Window Firmware FlashingThis section describes procedures to flash upgrade your adapter firmware. Flash kits for drives, communications adapters, and peripherals are provided on the Allen-Bradley Web Updates site located at /support/abdrives/webupdate . Flashing can only be performed using a 1203-USB or 22-SCM-232 converter. For information about how to connect to your drive, please refer to the 1203-USB or 22-SCM-232 User Manual. They can be viewed/downloaded on the Literature Library web site located at .Step 4ATTENTION: Risk of permanent equipment damage exists. Once a flash update has been started, do not remove power from the drive (or the 22-XCOMM-DC-BASE External Comms Kit, if used) until after the download has completed and the adapter MOD status indicator starts FLASHING GREEN. If power is removed before this occurs, the adapter may be permanently damaged. An adapter that has been damaged in this22-COMM-D DeviceNet Adapter Firmware v1.0115Installing the Flash Kit1.Install the flash kit utility from the Allen-Bradley Web Updates site forthe 22-COMM-D adapter. (This also automatically installs theControlFLASH utility and deploys the firmware files for use withHyperTerminal on your computer.)2.You are now ready to use DriveExplorer, DriveExecutive,ControlFLASH or HyperTerminal to update the adapter. Refer to the respective section below and follow the instructions.Using DriveExplorer Lite/Full to Flash Update1.With the Flash Kit installed (see Installing the Flash Kit), launchDriveExplorer and go online (via a 1203-USB or 22-SCM-232converter) with the drive that is connected to the adapter.2.In the DriveExplorer treeview, click on 22-COMM-D DeviceNetModule. Then click the information icon as shown in Figure 1 todisplay the adapter’s Properties screen.3.On the 22-COMM-D Properties screen, click the Details tab.Important:This update may cause the adapter parameters to revert to their default values. You may want to save yourconfiguration using DriveExplorer or the HIM CopyCatfeature before upgrading.4.To start the flash update, click the Flash Update… button. Then select“v1.011.xx Full” from the list of available updates and click Next >.Follow the remaining screen prompts until the flash update procedure completes and displays the new firmware version (v1.011).Using DriveExecutive to Flash Update1.With the Flash Kit installed (see Installing the Flash Kit), launchDriveExecutive and go online (via a 1203-USB or 22-SCM-232converter) with the drive that is connected to the adapter.2.In the DriveExecutive treeview, click on 22-COMM-D adapter. Thenclick the information icon as shown in Figure 2 to display the adapter’s Properties screen.3.On the 22-COMM-D Properties screen, click the Component Detailstab.Important:This update may cause the adapter parameters to revert to their default values. You may want to save yourconfiguration using DriveExecutive or the HIM CopyCatfeature before upgrading.4.To start the flash update, click the Flash Update button. Then select the22-COMM-D from the list of available devices and click Next >.622-COMM-D DeviceNet Adapter Firmware v1.0115.Select “v1.011.xx Full” from the list of available updates and clickNext >. Follow the remaining screen prompts until the flash updateprocedure completes and displays the new firmware version (v1.011).Using ControlFLASH to Flash Update1.With the Flash Kit installed (see Installing the Flash Kit on page5),launch ControlFLASH by selecting Start > (All) Programs > FlashProgramming Tools > ControlFLASH.2.On the ControlFLASH Welcome screen, click Next >.3.Choose the appropriate 22-COMM-D update from the list of availableupdates and click Next >.Important:This update may cause the adapter parameters to revert totheir default values. You may want to save yourconfiguration using the HIM CopyCat feature,DriveExplorer or DriveExecutive before upgrading.4.Expand the treeview for the communication path you are using, andselect the drive icon that represents the drive with the 22-COMM-Dadapter you are updating. Then click OK.5.With the Multiple Assemblies Found window displayed, select“Port X - 22-COMM-D” from the list and click OK.6.With the Firmware Revision window displayed, select “1.011.xx Full”from the list of available updates and click Next >. Follow theremaining screen prompts until the flash procedure completes anddisplays the new firmware revision (v1.011).Using HyperTerminal to Flash Update1.Verify that adapter jumper J2 is set to Single operating mode.2.With the Flash Kit installed (see Installing the Flash Kit on page5),launch HyperTerminal and go online (via a 1203-USB or 22-SCM-232converter) with the powered drive that is connected to the adapter.3.Press the Enter key until the main menu (Figure 3) appears.Figure 3 Main MenuMain Menu - Enter Number for Selection1> Display Setup Parameters2> Display Event Queue3> Flash Upgrade4.In the main menu, press 3 to flash upgrade. Then press the number keythat corresponds to the “22-COMM-D” in the list, and press Y (for Yes)to update the flash code. The terminal program will start displaying theletter “C”. This signals the XMODEM protocol that the download mayproceed. You then have one minute to start the transfer.22-COMM-D DeviceNet Adapter Firmware v1.01175.Select Transfer > Send File to display the Send File screen (Figure 4).6.Click Browse and navigate to the flash file located in:C:\ Program Files\ControlFLASH\0001\0079\8100Figure 4 Send File Screen7.In the Select File to Send window list, click on the “22-COMM-D_1_011_01_Full.bin” file. Then click Open . This file name now appears in the Filename box in the Send File screen.8.In the Protocol box, select “Xmodem.”9.Click Send . A dialog box appears and reports the progress of the update. When it is complete, the message “Flash Complete” appears. Press any key to continue.Important:Keep the device powered for 15 seconds after the operation has completed or until the adapter MOD status indicator starts flashing green. 10.Press the Enter key to return to the main menu.11.After the flash successfully completes, set adapter jumper J2 to the desired Single or Multi-Drive operating mode position.RestrictionsNo restrictions apply to this revision of firmware.ATTENTION: Risk of injury or equipment damage exists. When you perform a flash update, the drive will fault if it is receiving control I/O from the adapter. Verify that the drive has stopped safely or is receiving controlI/O from an alternate source before beginning a flash update.TIP: To cancel the flash update at any time, press CTRL-X .U.S.Allen-BradleyDrivesTechnicalSupport-Tel:(1)262.512.8176,Fax:(1)262.512.2222,Email:*****************,Online:/support/abdrivesCompatible Revisions To use this revision of firmware, update your system tools as follows:Rockwell AutomationSupport Rockwell Automation provides technical information on the web to assist you in using our products. At , youcan find technical manuals, a knowledge base of Frequently AskedQuestions (FAQs), technical and application notes, sample code and links tosoftware service packs, and a MySupport feature that you can customize tomake the best use of these tools.Rockwell Automation also provides complimentary phone support fordrives, communication adapters, and peripherals. If you experience aproblem with the adapter, please review the information in its User Manual.For further help in getting your adapter operational, contact a CustomerSupport representative:For an additional level of technical phone support for installation, configuration and troubleshooting, we offer TechConnect Support programs. For more information, contact your local distributor or Rockwell Automation representative, or visit . Product Satisfaction Return Rockwell Automation tests all products to ensure that they are fully operational when shipped from the manufacturing facility. However, if your product is not functioning and needs to be returned: Update this:To this version or later:DriveExplorer Lite/Full4.01DriveExecutive3.01PowerFlex 4-Class Driveall versions compatible External LCD HIM (22-HIM-**)all versions compatible RSLinx Classic 2.43United States (1) 262.512.8176Monday – Friday, 7am – 6pm CSTOutside United States Please contact your local Rockwell Automationrepresentative for any technical support issues.United States Contact your distributor. You must provide a Customer Support case number (see phone number above to obtain one) to your distributor to complete the return process.Outside United States Please contact your local Rockwell Automation representative for return procedure.。
艾普achts DVR 系列固件升级说明书
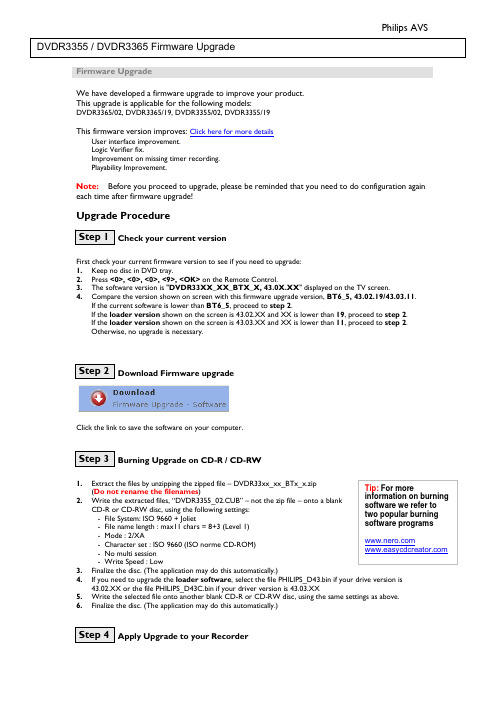
Firmware UpgradeWe have developed a firmware upgrade to improve your product. This upgrade is applicable for the following models:DVDR3365/02, DVDR3365/19, DVDR3355/02, DVDR3355/19This firmware version improves: Click here for more detailsUser interface improvement.Logic Verifier fix. Improvement on missing timer recording.Playability Improvement. Note: Before you proceed to upgrade, please be reminded that you need to do configuration again each time after firmware upgrade! Upgrade ProcedureCheck your current versionFirst check your current firmware version to see if you need to upgrade:1. Keep no disc in DVD tray.2. Press <0>, <0>, <0>, <9>, <OK> on the Remote Control.3. The software version is "DVDR33XX_XX_BTX_X, 43.0X.XX " displayed on the TV screen.4. Compare the version shown on screen with this firmware upgrade version, BT6_5, 43.02.19/43.03.11. If the current software is lower than BT6_5, proceed to step 2. If the loader version shown on the screen is 43.02.XX and XX is lower than 19, proceed to step 2.If the loader version shown on the screen is 43.03.XX and XX is lower than 11, proceed to step 2. Otherwise, no upgrade is necessary.Download Firmware upgradeClick the link to save the software on your computer.Burning Upgrade on CD-R / CD-RW1.Extract the files by unzipping the zipped file – DVDR33xx_xx_BTx_x.zip (Do not rename the filenames ) 2. Write the extracted files, “DVDR3355_02.CUB” – not the zip file – onto a blank CD-R or CD-RW disc, using the following settings: - File System: ISO 9660 + Joliet - File name length : max11 chars = 8+3 (Level 1) - Mode : 2/XA - Character set : ISO 9660 (ISO norme CD-ROM) - No multi session- Write Speed : Low3. Finalize the disc. (The application may do this automatically.)4. If you need to upgrade theloader software , select the file PHILIPS_D43.bin if your drive version is 43.02.XX or the file PHILIPS_D43C.bin if your driver version is 43.03.XX5. Write the selected file onto another blank CD-R or CD-RW disc, using the same settings as above.6. Finalize the disc. (The application may do this automatically.)Apply Upgrade to your Recorder1.Power up the recorder and open the DVD tray. read the disc. l show "SW UPGD ". The TV screen will show a 5.isc ” in the following 2 situations. pplicable models above 2.Insert the prepared upgrade CD-ROM. 3.Close the tray and the recorder will auto 4.Upon recognize the disc, the local display of recorder wil dialog box titled “Disc Upgrade ” Note: The recorder will indicate “Unknown D - When the software upgrade is not meant for your recorder (Check the a ) 6.Navi e pgrade at this 7.8.rder shows “SW DONE ” and the 9.the tray 10.s supply during the entire upgrading process, 11.be alarmed. Simply press <STANDBY > 12. g the recorder. roceed to Step 5 if loader software upgrade is needed. pply Loader Software Upgrade to your RecorderPower up the recorder and open the DVD tray. ROM. ill show "DRV UPG ". The TV screen will show a 5.” in the following 2 situations. pplicable models above - Problem with writing of CD-ROM. Try again with a different CD-ROM if possible. gat to OK button on TV and press <OK > on the remote control. You can cancel the u point by navigating to CANCEL button on TV and pressing <OK > on the remote control. If you proceed with the upgrade, the local display of recorder will scroll the message “ SW UPGRADING ”, while a progress bar will be shown on the TV screen. The whole process takes about 1 minute after which local display of reco dialog box on TV screen indicates successful upgrading. The tray will open as well. Remove the CD-ROM before pressing <OK > on the remote control. The recorder should close and restart automatically after about 10 seconds. Note: Do not press any buttons or interrupt the main otherwise the recorder may become defective.. Note: Sometimes, the recorder does not close the tray. Do not on the remote control to wake up the recorder and the tray will close immediately. It is better to power off and on the recorder again after software upgrade before usin PA 1.2.Insert the prepared loader software upgrade CD-3.Close the tray and the recorder will auto read the disc. 4.Upon recognizing the disc, the local display of recorder w dialog box titled “Loader Software Upgrade ” Note: The recorder will indicate “Unknown Disc - When the software upgrade is not meant for your recorder (Check the a ) 6.Navi e pgrade at this 7.VE 8.rder shows “DRV DONE ” and 9.ould close the tray 10.s supply during the entire upgrading process, 11.be alarmed. Simply press <STANDBY > 12. g the recorder. our product is successfully upgraded! irmware upgrade historyirmware Version BT6_5ves the following performance:when the following keys are pressed in the Timer Recording, Timer /Edit • played back” problem.lem.m. - Problem with writing of CD-ROM. Try again with a different CD-ROM if possible. gat to OK button on TV and press <OK > on the remote control. You can cancel the u point by navigating to CANCEL button on TV and pressing <OK > on the remote control. If you proceed with the upgrade, the local display of recorder will scroll the message “ DRI UPGRADING ”, while a progress bar will be shown on the TV screen. The whole process takes about 4 minute after which local display of reco the dialog box on TV screen indicates successful upgrading. The tray will open as well. Remove the CD-ROM before pressing <OK > on the remote control. The recorder sh and restart automatically after about 10 seconds. Note: Do not press any buttons or interrupt the main otherwise the recorder may become defective.. Note: Sometimes, the recorder does not close the tray. Do not on the remote control to wake up the recorder and the tray will close immediately. It is better to power off and on the recorder again after software upgrade before usinY FF Release Date July 3 2006This upgrade software impro • Fix logic verifier problem.• Fix “UOP sign not displayed /Select /Audio/ Record Mode”.Fix “Specific MP3 file cannot be • Fix “VPS timer record is blocked” problem.• Fix “Missing VPS timer in Simtest in Vienna” prob • Fix “Overlapping VPS Timers are not recorded” proble。
思科IP DECT 6800系列多平台固件说明书
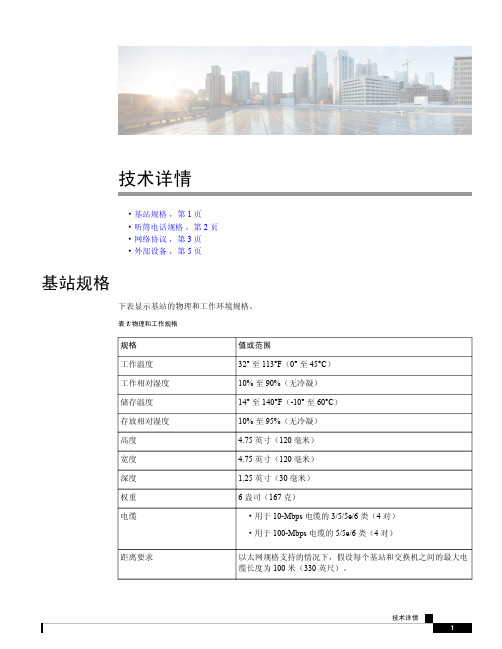
技术详情•基站规格,第1页•听筒电话规格,第2页•网络协议,第3页•外部设备,第5页基站规格下表显示基站的物理和工作环境规格。
表1:物理和工作规格规格值或范围工作温度32°至113°F(0°至45°C)工作相对湿度10%至90%(无冷凝)储存温度14°至140°F(-10°至60°C)存放相对湿度10%至95%(无冷凝)高度4.75英寸(120毫米)宽度4.75英寸(120毫米)深度1.25英寸(30毫米)权重6盎司(167克)•用于10-Mbps电缆的3/5/5e/6类(4对)电缆•用于100-Mbps电缆的5/5e/6类(4对)以太网规格支持的情况下,假设每个基站和交换机之间的最大电距离要求缆长度为100米(330英尺)。
值或范围规格本地电源的电源适配器以太网PoE (用于正常供电的以太网适配器);IEEE 802.3:功率等级2(3.84–6.49W)电源频段在出厂时设置,客户无法进行更改。
•1880–1895(台湾)••1880–1900MHz (澳大利亚和新西兰–节能22dBM )•1880–1900MHz (欧盟和亚太地区)•1910–1930MHz (拉美和阿根廷)•1910–1920MHz (巴西和乌拉圭)•1910–1920MHz (乌拉圭–节能140mW )•1910–1930MHz (智利–节能22dBM )•1920–1930MHz (美国和加拿大)射频(RF)频段有关基站的详细技术信息,请参阅数据表:https:///c/en/us/products/collaboration-endpoints/ip-dect-6800-series-multiplatform-firmware/datasheet-listing.html听筒电话规格下表显示听筒电话的物理和工作环境规格。
表2:物理和工作规格值或范围规格32°至113°F (0°至45°C )工作温度10%至90%(无冷凝)工作相对湿度14°至140°F (-10°至60°C )储存温度10%至95%(无冷凝)存放相对湿度标准听筒:4.6英寸(117毫米)加固型听筒电话:4.6英寸(117毫米)高度技术详情听筒电话规格值或范围规格标准听筒:1.8英寸(46毫米)加固型听筒电话:1.8英寸(46毫米)宽度标准听筒:0.78英寸(20毫米)加固型听筒电话:0.78英寸(20毫米)深度标准听筒:3盎司(86克)加固型听筒电话:3盎司(86克)权重充电锂离子。
STMicroelectronics WeSU设备固件升级说明书
January 2017 DocID029123 Rev 2 1/3For further information contact your local STMicroelectronics sales office ST_BLUE_DFUWeSU over-the-air device firmware upgradeData briefFeatures∙Upgrade WeSU firmware easily through your smartphone∙No leads or physical connections∙Available at Google Play TM and Apple TM app stores DescriptionThe ST BlueDFU app allows WeSU (STEVAL-WESU1) boards to receive firmware images over-the-air from a smartphone and write them to the STM32L151 Flash memory. This functionality is enabled by BlueNRG-MS, Bluetooth low energy wireless network processor.Refer to the STEVAL-WESU1 user manual for ST BlueDFU use procedures.Revision history ST_BLUE_DFU 1 Revision historyST_BLUE_DFUIMPORTANT NOTICE – PLEASE READ CAREFULLYSTMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and improvements to ST products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on ST products before placing orders. ST products are sold pursuant to ST’s terms and conditions of sale in place at the time of or der acknowledgement.Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or the design of Purchasers’ products.No license, express or implied, to any intellectual property right is granted by ST herein.Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.ST and the ST logo are trademarks of ST. All other product or service names are the property of their respective owners.Information in this document supersedes and replaces information previously supplied in any prior versions of this document.© 2017 STMicroelectronics – All rights reserved。
多旋翼飞行器 F4飞控+4合1电调说明书
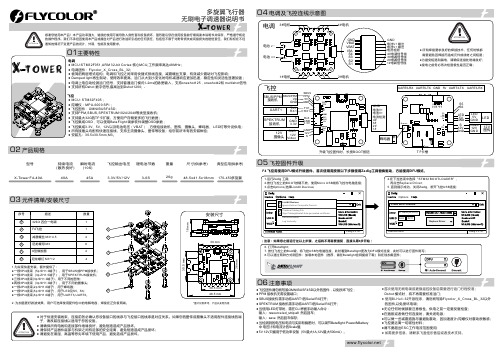
*图片仅供参考,产品以实物为准1.为实现快速安装,额外提供了:●一根5Pin线束(5p SH1.0端子),用于SBUS或PPM接收机;●一根3Pin线束(3p ZH1.5端子),用于SPEKTRUM接收机;●三根3Pin线束(3p SH1.0端子),用于不同的图传;●两根3Pin线束(3p SH1.0端子),用于不同的摄像头;●一根2Pin线束(2p SH1.0端子),用于蜂鸣器;●一根5Pin线束(5p SH1.0端子),用于LED及S5,S6;●一根6Pin线束(6p SH1.0端子),用于UART3,UART6。
2. 为加强更好滤波效果,用户可选择使用配件包中的电解电容,焊接在正负极两端。
持续电流(散热良好)瞬时电流(10S)飞控输出电压尺寸(供参考)重量锂电池节数型号典型应用(供参考)X-Tower F4-40A 40A45A3-6S170-450多旋翼3.3V/5V/12VF4 飞控需使用DFU模式升级固件。
首次使用需按照以下步骤使用Zadig工具替换驱动,方能使用DFU模式。
(注意:如果您之前运行过以上步骤,之后将不再需要重复,直接从第6步开始)● 飞控固件请勿刷写除OMNIBUSF4SD以外的固件,以免损坏飞控;● PPM 接收机无需设置端口;SBUS接收机需手动将UART1的Serial RX打开;●SPEKTRUM 接收机需手动将UART3的Serial RX打开;●当使用LED灯带时,需在CLI界面手动输入命令:●输入:resource led_strip a8 然后回车;输入:save 然后回车保存;当检测到的电压和电流与实际有偏差时,可以调节Betaflight-Power&Battery●中 电压计和电流计的Scale值;●只能用于低功率设备(最大,最大)。
5V12V5V1A12V500mA●首次使用无刷电调或更换遥控设备后需要进行油门行程校准;Dshot 模式时,将不再需要校准油门;● 使用BLHeli-开源程序,32请勿刷写除Flycolor_X_Cross_BL_32以外的固件,以免损坏电调;●无论任何时候都要注意极性,供电之前一定要反复检查;●在插拔或者做任何连接时,请关闭电源;●可以做一些减震措施尽量避免震动,因加速度计/陀螺仪对震动很敏感;●飞控要远离一切磁性材料;●请不要超出工作电流范围使用ESC;● 如需更多信息,请联系飞盈佳乐售后或者技术支持。
戴尔机箱管理控制器固件版本3.2自述文件说明书
######################################################################DELL(TM) CHASSIS MANAGEMENT CONTROLLER VERSION 3.2###################################################################### Version: 3.2Release Date: 15 March 2011This document contains updated information about the Dell ChassisManagement Controller (CMC).For more information about the CMC, including installation andconfiguration information, see the "Dell Chassis Management ControllerFirmware Version 3.2 User Guide" and the "Dell OpenManage(TM) ServerAdministrator User's Guide." These documents are located on the DellSupport website at "."######################################################################TABLE OF CONTENTS######################################################################This file contains the following sections:* Criticality* Minimum Requirements* Release Highlights* Known Issues###################################################################### CRITICALITY######################################################################1 - Critical###################################################################### MINIMUM REQUIREMENTS######################################################################====================================================================== SUPPORTED SYSTEMS====================================================================== CMC version 3.2 is supported on the following Dell PowerEdge(TM)systems in the Dell PowerEdge M1000-e system enclosure:* Dell PowerEdge M600* Dell PowerEdge M605* Dell PowerEdge M610* Dell PowerEdge M610X* Dell PowerEdge M710* Dell PowerEdge M710HD* Dell PowerEdge M805* Dell PowerEdge M905* Dell PowerEdge M910====================================================================== SUPPORTED WEB BROWSERS====================================================================== CMC version 3.2 is supported on the following web browsers:* Microsoft Internet Explorer 7: Windows XP 32-bit SP3, WindowsVista SP2 x32 and x64 SP2, Windows Server 2003 SP2 x32 and x64,Windows Server 2008 SP2 x32 and x64.* Microsoft Internet Explorer 8: Windows XP 32-bit SP3, WindowsVista SP2 x32 and x64, Windows 7 x32 and x64, Windows Server 2003SP2 x32 and x64, Windows Server 2008 x32 and x64, Windows Server2008 R2 x64.* Microsoft Internet Explorer 8 (x64): Windows Vista SP2 x64,Windows 7 x64, Windows Server 2003 SP2 x64, Windows Server 2008 x64,Windows Server 2008 R2 x64.* Mozilla Firefox 3.5: Windows XP 32-bit SP3, Windows Vista SP2 x32and x64, Windows 7 x32, Windows Server 2003 SP2 x32 and x64, WindowsServer 2008 x32 and x64, Windows Server 2008 R2 x64.* Mozilla Firefox 3.6: Windows XP 32-bit SP3, Windows Vista SP2 x64,Windows 7 x32 and x64, Windows Server 2003 SP2 x32 and x64, WindowsServer 2008 x32 and x64, Windows Server 2008 R2 x64.* Mozilla Firefox 3.6 (x64): Windows 7 x64, Windows Server 2008 R2 x64.=============================================FIRMWARE VERSIONS=============================================CMC Firmware Version: 3.2=============================================RECOMMENDED MODULE FIRMWARE VERSIONS=============================================The following chassis module firmware versions are recommendedadditionally if CMC version 3.2 is installed:* iDRAC Firmware Version:- 3.20 for Dell PowerEdge M610, M610X, M710, M710HD, M910- 1.53 for Dell PowerEdge M600, M605, M805, M905* Dell Lifecycle Controller Version:- 1.5 for Dell PowerEdge M610, M610X, M710, M710HD, M910* BIOS Version:- 3.0.0 for Dell PowerEdge M610, M610X, M710- 2.0.0 for Dell PowerEdge M710HD- 2.1.0 for Dell PowerEdge M910- 2.3.1 for Dell PowerEdge M600- 5.4.1 for Dell PowerEdge M605- 2.3.3 for Dell PowerEdge M805, M905* CPLD Version:- 1.0.3 for Dell PowerEdge M610, M610X, M710- 1.0.0 for Dell PowerEdge M710HD- 1.0.1 for Dell PowerEdge M910- 1.1.1 for Dell PowerEdge M600- 1.1.0 for Dell PowerEdge M605, M805, M905###################################################################### RELEASE HIGHLIGHTS###################################################################### * Resolves a vulnerability in CMC3.0 and CMC3.1 firmware versions,which can allow a non-Administrator user to perform Administratoroperations over the WS-MAN interface.* Firmware update of server component(s) across multiple servers in thechassis using Lifecycle Controller.* Extended Non-Volatile (persistent) Storage, using 2 GB Secure Digital(SD) media in the CMC card slot(s).* Power Cap can be set to 16685W AC.* Chassis Group Quick Launch and Single-Sign On (SSO) from the leaderto iDRAC GUI and KVM.* Support for the following new hardware:* QLogic QME8242-k CNA Mezz Card* PowerConnect M8024-k 10Gb Ethernet Switch* Dell 10Gb Ethernet Pass Through -k* QLogic QMD8252-k CNA NDC* Broadcom 57712-k NDC* Support for remote management of MAC addresses.###################################################################### KNOWN ISSUES FOR BROWSERS###################################################################### No known issues for this release.###################################################################### KNOWN ISSUES FOR CMC Version 3.2###################################################################### * The new one to many Lifecycle Controller based update feature requiresserver firmware versions be updated before using this feature. Referto the "RECOMMENDED MODULE FIRMWARE VERSIONS" section for the proper version numbers. The modules should be updated in the following order:- BIOS- Lifecycle Controller- iDRAC6* While using the command "racadm config -f" with:- CMC 3.2 or later versions of firmware, ensure that the RemoteRACADM client version 6.3.0 or later is installed.- CMC with an earlier version of 3.2 firmware, ensure that theRemote RACADM client version earlier than 6.3.0 is installed.* The remote racadm testfeature command(racadm -r <IP Address> testfeature ...) does not support the-d (debug) option.* For Single Sign-On and Smart Card login, the client system must bea part of the Active Directory domain and Kerberos Realm. OnWindows 7, clients under the Local Security Polices, must ensure toconfigure the security option "Network security: Configureencryption types allowed for Kerberos." This policy setting allowsyou to set the encryption types that Kerberos is allowed to use.The DES_CBC_MD5 encryption type must be selected. If thisencryption type is not selected, the encryption type will not beallowed. This setting may affect compatibility with client computersor services and applications.* When you add a member chassis to a chassis group using theMulti-Chassis Management feature, you cannot specify the groupmembers with an IPv6 address.###################################################################### KNOWN ISSUES FOR USER INTERFACE ONLINE HELP###################################################################### No known issues for this release.###################################################################### KNOWN ISSUES FOR DOCUMENTATION###################################################################### No known issues for this release.###################################################################### Information in this document is subject to change without notice.(C) 2011 Dell Inc. All rights reserved.Reproduction in any manner whatsoever without the written permissionof Dell Inc. is strictly forbidden.Trademarks used in this text: "Dell(TM)", "OpenManage(TM)", and "PowerEdge(TM)" are trademarks of Dell Inc. "Microsoft(R)", "Windows(R)", "Windows(R) 7", "Windows Vista(R)", "Windows Server(R)", "Windows(R) XP", “Internet Explorer(R)”, and "Active Directory(R)"are either trademarks or registered trademarks of Microsoft Corporationin the United States and/or other countries. "Mozilla(R)" and"Firefox(R)" are registered trademarks of the Mozilla Foundation"Red Hat(R)" and "Red Hat Enterprise Linux(R)" are registered trademarks of Red Hat,Inc. in the United States and other countries.Other trademarks and trade names may be used in this document torefer to either the entities claiming the marks and names or theirproducts. Dell Inc. disclaims any proprietary interest in trademarksand trade names other than its own.March 2011。
技术手册 PD4-E (EtherCAT)说明书

技术手册 PD4-E现场总线: EtherCAT适用于以下设备:PD4-E591L42-E-65-1, PD4-E601L42-E-65-1, PD4-EB59CD-E-65-1适用于固件版本 FIR-v1748技术手册版本: 1.0.1内容1 简介 (7)1.1 版本信息 (7)1.2 版权、名称和联系信息 (7)1.3 预期用途 (7)1.4 保修和免责声明 (7)1.5 专业人员 (8)1.6 其他适用规则 (8)1.7 欧盟产品安全指令 (8)1.8 使用的图标 (8)1.9 文本中的强调 (8)1.10 数值 (9)1.11 位 (9)1.12 计数方向#箭头# (9)2 安全和警告通知 (10)3 技术细节和引脚分配 (11)3.1 环境条件 (11)3.2 尺寸图 (11)3.3 电性能和技术数据 (12)3.4 过热保护 (13)3.5 LED 信号 (15)3.6 引脚分配 (17)4 调试 (22)4.1 正在建立通信 (22)4.2 自动设置 (23)4.3 试运行 (26)4.4 特殊驱动模式#脉冲方向和模拟转速# (27)5 一般概念 (30)5.1 控制模式 (30)5.2 CiA 402 电源状态机 (33)5.3 用户定义单位 (38)5.4 运动范围限制 (42)5.5 循环时间 (42)6 工作模式 (44)6.1 标准定位 (44)6.2 速度 (52)6.3 标准速度 (53)6.6 插补位置模式 (65)6.7 循环同步位置 (66)6.8 循环同步速度 (68)6.9 循环同步转矩 (69)6.10 脉冲方向模式 (70)6.11 自动设置 (72)7 特殊功能 (73)7.1 数字输入和输出 (73)7.2 I2t 电机过载保护 (81)7.3 保存对象 (82)8 EtherCAT (87)9 使用NanoJ编程 (88)9.1 NanoJ 程序 (88)9.2 NanoJ 程序中的映射 (91)9.3 NanoJ 程序中的系统调用 (93)10 对象目录说明 (95)10.1 概述 (95)10.2 对象说明的结构 (95)10.3 对象说明 (95)10.4 数值说明 (96)10.5 说明 (97)1000h Device Type (98)1001h Error Register (98)1003h Pre-defined Error Field (99)1008h Manufacturer Device Name (103)1009h Manufacturer Hardware Version (104)100Ah Manufacturer Software Version (104)1010h Store Parameters (105)1011h Restore Default Parameters (108)1018h Identity Object (111)1020h Verify Configuration (113)1600h Receive PDO 1 Mapping Parameter (114)1601h Receive PDO 2 Mapping Parameter (117)1602h Receive PDO 3 Mapping Parameter (119)1603h Receive PDO 4 Mapping Parameter (121)1A00h Transmit PDO 1 Mapping Parameter (123)1A01h Transmit PDO 2 Mapping Parameter (126)1A02h Transmit PDO 3 Mapping Parameter (128)1A03h Transmit PDO 4 Mapping Parameter (131)1C00h Sync Manager Communication Type (133)1C12h Sync Manager PDO Assignment (135)1C13h Sync Manager PDO Assignment (136)1C32h Output Sync Manager Synchronization (138)1C33h Input Sync Manager Synchronization (139)1F50h Program Data (140)1F51h Program Control (142)1F57h Program Status (143)2034h Upper Voltage Warning Level (145)2035h Lower Voltage Warning Level (146)2036h Open Loop Current Reduction Idle Time (146)2037h Open Loop Current Reduction Value/factor (147)2038h Brake Controller Timing (147)2039h Motor Currents (149)203Ah Homing On Block Configuration (151)203Bh I2t Parameters (152)203Dh Torque Window (155)203Eh Torque Window Time Out (155)203Fh Max Slippage Time Out (156)2056h Limit Switch Tolerance Band (156)2057h Clock Direction Multiplier (157)2058h Clock Direction Divider (157)2059h Encoder Configuration (157)205Ah Absolute Sensor Boot Value (in User Units) (158)205Bh Clock Direction Or Clockwise/Counter Clockwise Mode (158)2084h Bootup Delay (159)2101h Fieldbus Module Availability (159)2102h Fieldbus Module Control (160)2103h Fieldbus Module Status (162)2110h EtherCAT Slave Status (164)2300h NanoJ Control (164)2301h NanoJ Status (165)2302h NanoJ Error Code (166)230Fh Uptime Seconds (167)2310h NanoJ Input Data Selection (168)2320h NanoJ Output Data Selection (169)2330h NanoJ In/output Data Selection (171)2400h NanoJ Inputs (172)2410h NanoJ Init Parameters (173)2500h NanoJ Outputs (174)2600h NanoJ Debug Output (175)2701h Customer Storage Area (176)2800h Bootloader And Reboot Settings (176)3202h Motor Drive Submode Select (178)3203h Feedback Selection (179)3204h Feedback Mapping (180)3210h Motor Drive Parameter Set (182)3212h Motor Drive Flags (186)3220h Analog Inputs (188)3221h Analogue Inputs Control (189)3240h Digital Inputs Control (189)3241h Digital Input Capture (192)3242h Digital Input Routing (194)3243h Digital Input Homing Capture (196)3250h Digital Outputs Control (197)3252h Digital Output Routing (200)3320h Read Analogue Input (201)3321h Analogue Input Offset (203)3322h Analogue Input Pre-scaling (204)33A0h Feedback Incremental A/B/I 1 (205)3700h Deviation Error Option Code (206)4012h HW Information (207)4013h HW Configuration (207)4014h Operating Conditions (208)4015h Special Drive Modes (210)4016h Factory Settings (212)6040h Controlword (214)6041h Statusword (215)6042h Vl Target Velocity (216)6043h Vl Velocity Demand (217)6044h Vl Velocity Actual Value (217)6046h Vl Velocity Min Max Amount (218)6048h Vl Velocity Acceleration (219)6049h Vl Velocity Deceleration (220)604Ah Vl Velocity Quick Stop (221)604Ch Vl Dimension Factor (222)605Ah Quick Stop Option Code (223)605Bh Shutdown Option Code (224)605Ch Disable Option Code (224)605Dh Halt Option Code (225)605Eh Fault Option Code (226)6060h Modes Of Operation (226)6061h Modes Of Operation Display (227)6062h Position Demand Value (227)6063h Position Actual Internal Value (228)6064h Position Actual Value (228)6065h Following Error Window (229)6066h Following Error Time Out (229)6067h Position Window (230)6068h Position Window Time (231)606Bh Velocity Demand Value (231)606Ch Velocity Actual Value (232)606Dh Velocity Window (232)606Eh Velocity Window Time (233)6071h Target Torque (233)6072h Max Torque (234)6074h Torque Demand (234)6075h Motor Rated Current (235)6077h Torque Actual Value (235)607Ah Target Position (236)607Bh Position Range Limit (236)607Ch Home Offset (237)607Dh Software Position Limit (238)607Eh Polarity (239)607Fh Max Profile Velocity (240)6080h Max Motor Speed (240)6081h Profile Velocity (241)6082h End Velocity (241)6083h Profile Acceleration (242)6084h Profile Deceleration (242)6085h Quick Stop Deceleration (243)6086h Motion Profile Type (243)6087h Torque Slope (244)608Fh Position Encoder Resolution (244)6090h Velocity Encoder Resolution (245)6091h Gear Ratio (246)6092h Feed Constant (247)6096h Velocity Factor (248)6097h Acceleration Factor (250)6098h Homing Method (251)6099h Homing Speed (251)609Ah Homing Acceleration (252)60A9h SI Unit Velocity (256)60B0h Position Offset (257)60B1h Velocity Offset (257)60B2h Torque Offset (258)60C1h Interpolation Data Record (258)60C2h Interpolation Time Period (259)60C4h Interpolation Data Configuration (260)60C5h Max Acceleration (262)60C6h Max Deceleration (263)60E4h Additional Position Actual Value (263)60E5h Additional Velocity Actual Value (264)60E6h Additional Position Encoder Resolution - Encoder Increments (265)60E8h Additional Gear Ratio - Motor Shaft Revolutions (266)60E9h Additional Feed Constant - Feed (268)60EBh Additional Position Encoder Resolution - Motor Revolutions (269)60EDh Additional Gear Ratio - Driving Shaft Revolutions (270)60EEh Additional Feed Constant - Driving Shaft Revolutions (271)60F2h Positioning Option Code (272)60F4h Following Error Actual Value (273)60F8h Max Slippage (274)60FAh Control Effort (274)60FCh Position Demand Internal Value (275)60FDh Digital Inputs (275)60FEh Digital Outputs (276)60FFh Target Velocity (277)6502h Supported Drive Modes (278)6503h Drive Catalogue Number (279)6505h Http Drive Catalogue Address (279)11 版权 (280)11.1 简介 (280)11.2 AES (280)11.3 MD5 (280)11.4 uIP (281)11.5 DHCP (281)11.6 CMSIS DSP Software Library (282)11.7 FatFs (282)11.8 Protothreads (282)11.9 lwIP (282)1 简介PD4-E 是一款带有集成控制器的无刷电机,防护等级为 IP65。
1.2效率源迈拓固件修复说明书

效率源迈拓固件修复说明书1.22月初推出迈拓4DX固件修复程序后,有很多客户来信来电反映修复效果不佳或干脆一个都没有修好过。
经过我们对客户所反馈信息的分析,发现大部分属于固件版本不符造成的。
为此我们对1.0版进行改进增加了[查看信息][生成引导][读取内存][G表转换][G表清除][强力引导]等新功能。
下图为如何看盘体上的固件信息。
盘体上有两个地方比较关键,只要能对应的话即可有效1.2版本的界面中间的硬盘信息中MODEL:当前硬盘型号; CODE:为固件版本号; 同时界面中关键的两个信息为红色显示。
即:DAH017k0 和KMCB这两个号只要与对应的boot.cod 及boot.ram 对应,一般来说均可以生成引导。
即使[生成引导]不行的话,还可以使用我们改进过的[强力引导]。
我们在本次升级中,同时提供6个已经读取完成的目录,目录命名方式为17k0kcmcb/17k0ngdb/17k0cmbb/17k0cmdb 等。
其中17k0 为Code号:dah017k0 取后面4位数。
在4D系列中,除Dah017k0外还有DAH019K0。
后面的CMCB即是第二识别位。
请客户在建立目录时也使用这种命名规则,以便与其他客户进行固件共享。
以下我们来介绍一下如何生成一个CODE号为:DAH017K0 第二识别号为CMCB的引导代码、内存镜像及全好固件1、准备一个CODE号是DAH017k0 第二识别号为CMCB的全好硬盘,并将硬盘设置成主盘模式。
(切记不用跳成安全模式!!)装在IDE2口。
2、在当前目录下建立一个标准目录:c:\4d0x>MD 17k0cmcb [在4d0x目录下再建立目录]3、c:\4d0x\17k0cmcb>copy c:\4d0x\mouse.* [将4d0x目录下的mouse鼠标驱动拷贝到当前目录下]4、c:\4d0x\17k0cmcb>copy c:\4d0x\4d0x.* [将4d0x1.2版的主程序拷贝到当前目录下]5、c:\4d0x\17k0cmcb>mouse [执行鼠标驱动程序]6、c:\4d0x\17k0cmcb>4d0x [执行4d0x 1.2版主程序]7、按F8键进入主界面8、用鼠标点击[查看信息] 看信息是否正常9、用鼠标点击[生成引导] 并根据提示确认10、用鼠标点击[读取内存] 并根据提示确认11、用鼠标点击[备份模块]12、用鼠标点击[备份组]13、完成后退出即可。
Comtrol DeviceMaster设备更新指南说明书
Using TFTP Server to Update DeviceMaster firmwareDisable the DeviceMaster drivers in the PC as this will prevent conflicts between the driver and this procedure. In Driver Management Console right click the DeviceMaster and select ‘Disable” from the pop-up menuRequired FilesDownload from Comtrol the Firmware files needed or as recommended by Comtrol Tech Support. PortVision DXftp:///dev_mstr/portvision_dx (portvivison_dx_x.xx.msi)Bootloader:ftp:///dev_mstr/rts/software/bootloader/ (bootloader-x.xx.cmtl)SocketServer firmware for socket communications:ftp:///dev_mstr/rts/software/socketserver/ (socketserver-x.xx.cmtl)Please note: SocketServer and NS-Link have been incorporated into a single file with the new extension of.cmtl. By default, once loaded, the file will show SocketServer in both the web page and PortVision DX until a driver begins communication with this particular DeviceMaster. Once a driver establishes communications, the firmware will immediately indicate that it is NS-Link without the driver having to upload that firmware to the DeviceMaster or the DeviceMaster being rebooted as in the past. If SocketServer does not change to NS-Link, then a driver loaded in the PC is NOT in communication with the DeviceMaster.Download from Comtrol the appropriate version of the Tftpdxx server:32bit system: ftp:///contribs/utilities/3rd_party_utils_free/tftp_server/tftpd32.400.zip64bit system: ftp:///contribs/utilities/3rd_party_utils_free/tftp_server/tftpd64.400.zipYou may use another TFTP server or software should you already have one These instructions will use a freeware version that for your convenience are available from the Comtrol site or from the vendor at:/tftpd32_download.htmlChapter 1 (page2): Rename and Extract the SocketServer and Bootloader FirmwareChapter 2 (page3): Install and Setup the TFTP ServerChapter 3 (page4): Set the BootLoader TimeoutChapter 4 (page6): Upload the FirmwareChapter 5 (page8): Confirm the success of the updateChapter 6 (page9): Reset the BootLoader Timeout ValueRename and Extract the SocketServer and Bootloader Firmware.(Return to Chapter List)Once downloaded change the extension of the SocketServer and Bootloader files from .cmtl to .zipOnce downloaded change the extension of the SocketServer and Bootloader files from .cmtl to .zipUnzip the renamed files.You will have 2 SocketServer files and 2 Bootloader files unzipped - Note the extensions of .bin and .nxbin. The .bin file will be used with RTS, SerialHub and PRO DeviceMaster’s. The .nxbin file will be used with ONLY the DeviceMaster LT16 model of the DeviceMaster.Install and Setup the TFTP Server(Return to Chapter List)Create a directory to extract the tftpdxx.400.zip to.In this example we will create a directory in the ‘C’ drive root called TFTP. In the TFTP folder create a sub folder called ‘files’.Extract the tftpdxx.400.zip to this directory. There is no install or setup to run. Once extracted, run thetftp32(64).exe file. It should look something like this showing the directory that it is running from and the IP address assigned to the PC. In this example that is C:\tftp and the Server interface 192.168.2.10.Click on the Browse button and browse to the ‘files’ sub folder created earlier.Copy the SocketServer and Bootloader bin files to the C:\TFTP\files directory.When you click on “Show Dir” you will see the files listed like thisClose the window and go to Windows Explorer to rename the files.For simplicity, rename the SocketServer file to 1.bin to save some effort typing the command line later. For simplicity, rename the Bootloader file to 2.bin to save some effort typing the command line later.Here you can see the SocketServer-x.xx.bin file has been renamed to 1.bin. The Bootloader file has been renamed to 2.bin as seen here using the “Show Dir” button in TFTP.Set the BootLoader Timeout(Return to Chapter List)Open PortVision DX. If you have not already done so, add the DeviceMaster listing to PortVision DX.Here you can see that some units have already been updated. We will be updating the highlighted unit. Right click the appropriate DeviceMaster and select “Telnet/SSH Session” from the pop-up menuLeave the defaults and click OKPress enter at the Password: prompt. There is no password by default, but if you have created a password, you will need to enter it here.You will be shown the current version of firmware installed. In this case weare updating SocketServer from the shown version of 8.04 to 9.36. You will be given a dm> prompt.At the prompt enter “timeout 60” (without quotes) At the prompt enter “reset” (without quotes)and press Enter and press EnterThe DeviceMaster will now be rebooting. Close the Putty window.Click OKUpload the Firmware(Return to Chapter List)Return to PortVision DX and Right click the appropriate DeviceMaster and select “Telnet / SSH Session” from the pop-up menu and again accept the defaults and click on “OK”.The Bootloader revision should now be seen. At the prompt, enter “dis“ and press enterIf not, then reboot and try again. to disable loading of SocketServerLoading disabled should then be displayedYou must be at a “RedBoot” prompt for the remaining steps.Enter the command load -r -b 0 -h <TFTP-Server_IP_Addr> <Downloaded_File_Name> where <TFTP-Server_IP_Addr> is the IP address of the PC running the TFTPD32 Server and where<Downloaded_File_Name> is the name of the firmware copied to the directory shown on the status bar. (In this example that is C:\TFTP and the file name has been changed to be 1.bin)In this example the command will be“load -r -b 0 -h 192.168.2.10 1.bin”(that is a numeric zero in the load string –NOT the alpha oO)Press enter to begin the loading.You should see something like this in TFTP:As long as the Raw file loaded message appears, allshould be well.Once the prompt has presented itself again,Enter “go” (without quotes) and pressenter. The DeviceMaster will now reboot.Close the Putty window.Confirm the success of the update(Return to Chapter List)In PortVision DX Right Click and select Refresh DeviceYou may need to do this more than once until you see the correct Software Version displayedThe correct version will now be shown. If not, the update was not successful in which case you may want to call Comtrol Technical Support.This has now been a successful firmware update. You may return to page 6 and repeat, selecting the 2.bin (Bootloader) firmware. Repeat for additional DeviceMasters as necessary.Reset the BootLoader Timeout Value(Return to Chapter List)Once updates of SocketServer and Bootloader have completedDouble Click on the DeviceMaster to open the Properties dialog.Change the BootLoader Timeout back to the default of 15 or 1 and lick on the Apply Changes and Close buttons.Return to page 4 and repeat for additional DeviceMaster units. When completed, close the Tftpd32 Server. If you experience any difficulty, stop and call Comtrol technical support at 763-957-6000.。
ARCO2.9 版本发布说明说明书
Release Note Version ARCO 2.9ARCO2.9版本发布说明A. Hardware Interface/硬件接口1. Control WPC: It is now available the use with controller WCP2030 from Pantec.WPC控制:支持Pantec WCP2030控制器。
2. Control Deva: It is now available the use with controller 004 from Deva.Deva控制:支持 Deva 004 控制器。
3. Control Ucc: The libraries from Renishaw UCC has been updatedUcc控制:支持Renishaw UCC的系统已经升级。
B. Languages/ 语言1. Polish Language: The language in Polish is now available波兰语:支持波兰语。
C. General Software implementations/软件升级1.Graphical Simulations of the Measuring Path: It is now possible, as an option, tosimulate the inspection path in Offline mode.测量路径的图形仿真:增加了离线状态的测量路径仿真选项。
2.Graphical Editing of Path: It has been added the option to graphically edit themeasuring path on the teach panel before they actually got send to the part program.路径的图形化编辑:增加了图形化的编辑测量路径功能,可以在路径实际生成程序前加以修改编辑。
POINT I O和ArmorPOINT I O DeviceNet适配器固件版本3.005使用说明

Release NotesPOINT I/O and ArmorPOINT I/O DeviceNet AdaptersFirmware Revision: 3.005Catalog Numbers 1734-ADN Series B, 1738-ADN12, 1738-ADN18, 1738-ADN18P , Series AAbout This PublicationThese release notes for Firmware Revision 3.005 supplement the existing documentation supplied with your product. Read this document before using the following POINT I/O ™ or ArmorPOINT ® I/O DeviceNet adapters, Firmware Revision 3.005.TopicPage About This Publication 1Before You Begin 2Enhancements 3Anomalies 3Additional Resources5ATTENTION: Firmware Revision 3.005 impacts your DeviceNet network and requires a new EDS file for RSLinx ® and RSNetWorx ™ softwares.POINT I/O and ArmorPOINT I/O DeviceNet Adapters 2Rockwell Automation Publication 1734-RN012C-EN-E - May 2015Before You BeginFirmware Backward CompatibilityThe following software revisions are compatible with this firmware release:•1756-DNB version 10.005•RSLinx ® software version 2.56 or laterFirmware Revision HistoryFirmware revision history for POINT I/O and ArmorPOINT I/O DeviceNet AdaptersRevision Description1.001First firmware revision released.1.004Second firmware revision released to provide anomaly information.3.003Third firmware revision released to provide enhancement and anomaly information.3.004Fourth firmware revision release – firmware revision updated to accommodate corrected anomalies.3.005Current firmware revision released to provide anomaly information.3 POINT I/O and ArmorPOINT I/O DeviceNet AdaptersRockwell Automation Publication 1734-RN012C-EN-E - May 2015The following tables provide a list of enhancements, known anomalies and corrected anomalies for the POINT I/O and ArmorPOINT I/O DeviceNet adapter firmware revisions.EnhancementsAnomaliesEnhancement for Firmware Revision 3.003Enhancement DescriptionSupport for third party ArmorPOINT I/O modulesCompatible third party ArmorPOINT I/O modules can be used with 1738-ADN adapters.This enhancement only applies to the 1738-ADN catalogs.Known Anomaly for Firmware Revision 3.004AnomalyDescriptionAdapter may not make a COS/Cyclic connection to POINT I/O modulesIf COS/Cyclic connection is used, during system power up, the adapter may not connect to the POINT I/O modules on its backplane when the adapter attempts to connect to the modules first before a connection from the scanner to the adapter is established.Users can observe this anomaly through the following behavior in LED status indicators during system power up:work Status LED flashes green.2.PointBus Status LED changes from flashing red to solid green, then back to flashing red.work Status LED is solid green.Known Anomaly for Firmware Revision 3.003AnomalyDescriptionError message displays when enabling ADRWhen the Auto-Device Replacement (ADR) feature is used and the Configuration Recovery option is enabled, the adapter causes the 1756-DNB scanner module to fault with an error code of #89.POINT I/O and ArmorPOINT I/O DeviceNet Adapters 4Rockwell Automation Publication 1734-RN012C-EN-E - May 2015Corrected Anomalies for Firmware Revision 3.005AnomalyDescriptionAdapter may not make a COS/Cyclic connection to POINT I/O modules If COS/Cyclic connection is used, during system power up, the adapter may not connect to the POINT I/O modules on its backplane when the adapter attempts to connect to themodules first before a connection from the scanner to the adapter is established.Users can observe this anomaly through the following behavior in LED status indicators during system power up:work Status LED flashes green.2.PointBus Status LED changes from flashing red to solid green, then back to flashing red.work Status LED is solid green.Corrected Anomalies for Firmware Revision 3.004AnomalyDescriptionIdle and Fault values are displayed incorrectlyAfter the controller is switched from RUN to PROGRAM mode and back, and then a DeviceNet cable break is applied, the Fault value outputs are NOT turned on: instead, the Idle value outputs are turned ON.This anomaly is observed when the adapter is correctly configured and connected.Error message displayed when enabling ADRWhen the Auto-Device Replacement (ADR) feature is used and the Configuration Recovery option is enabled, the adapter causes the 1756-DNB scanner module to fault with an error code of #89.Adapter becomes unresponsive Adapter becomes unresponsive on querying theSCAN_COUNTER (0xE) attribute in the Scan_Config (0x90) object.Adapter sending an unwanted extra byte The adapter sends out an extra byte with release commands, which is the Master's Mac ID.DeviceNet status LED is incorrectWhen the module is online and a cable break is applied, the module’s DeviceNet status LED is OFF when it should be flashing red.ODVA error in Identity ObjectThis firmware revision fixes the ODVA error in the Identity Object.5 POINT I/O and ArmorPOINT I/O DeviceNet AdaptersRockwell Automation Publication 1734-RN012C-EN-E - May 2015Additional ResourcesThese documents contain additional information concerning related Rockwell Automation products.Y ou can view or download publications at/literature/. T o order paper copies of technical documentation, contact your local Rockwell Automation distributor or sales representative.ResourceDescription1734 POINT I/O DeviceNet Adapter Installation Instructions, publication 1734-IN026Installation instructions for installing the 1734 POINT I/O DeviceNet adapters (1734-ADN, 1734-ADNX).1738 ArmorPOINT I/O DeviceNet Adapter Installation Instructions, publication 1738-IN014Installation instructions for installing the 1738 ArmorPOINT I/O DeviceNet adapters (1738-ADN, 1738-ADNX).1734 POINT I/O DeviceNet Adapter User Manual, publication 1734-UM0021734 POINT I/O DeviceNet adapter modules (1734-ADN, 1734-ADNX) user manual.1738 POINT I/O DeviceNet Adapter User Manual, publication 1738-UM0011734 POINT I/O DeviceNet adapter modules (1738-ADN, 1738-ADNX) user manual.Pinout Guide for 1738 ArmorPOINT Adapters and Power Supplies Wiring Diagram, publication 1738-WD004Pinout Guide for 1738 ArmorPOINT adapters and power supplies, Series A.Industrial Automation Wiring and Grounding Guidelines, publication 1770-IN041More information on proper wiring and grounding techniques.Product Certifications website:/pro ducts/certification/Provides declarations of conformity,certificates, and other certification details.POINT I/O and ArmorPOINT I/O DeviceNet Adapters 6 Notes:Rockwell Automation Publication 1734-RN012C-EN-E - May 20157 POINT I/O and ArmorPOINT I/O DeviceNet AdaptersNotes:Rockwell Automation Publication 1734-RN012C-EN-E - May 2015Publication 1734-RN012C-EN-E- May 2015Supersedes publication 1734-RN012B-EN-E- March 2015Copyright © 2015 Rockwell Automation, Inc. All rights reserved.Allen-Bradley, Rockwell Automation, POINT I/O, ArmorPOINT, RSLogix, RSNetWorx, RSLinx, and T echConnect are trademarks of Rockwell Automation, Inc.Trademarks not belonging to Rockwell Automation are property of their respective companies.Rockwell Automation SupportRockwell Automation provides technical information on the Web to assist you in using its products. At /support/, you can find technical manuals, a knowledge base of FAQs, technical and application notes, sample code and links to software service packs, and a MySupport feature that you can customize to make the best use of these tools.For an additional level of technical phone support for installation, configuration, and troubleshooting, we offer TechConnect support programs. For more information, contact your local distributor or Rockwell Automation representative, or visit /support/.Installation AssistanceIf you experience a problem within the first 24 hours of installation, please review the information that's contained in this manual. You can also contact a special Customer Support number for initial help in getting your product up and running.New Product Satisfaction ReturnRockwell Automation tests all of its products to ensure that they are fully operational when shipped from the manufacturing facility. However, if your product is not functioning and needs to be returned, follow these procedures.Documentation FeedbackYour comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document, complete this form, publication RA-DU002, available at /literature/.United States or Canada 1.440.646.3434Outside United States or CanadaUse the Worldwide Locator at/support/americas/phone_en.html , or contact your local Rockwell Automation representative.United States Contact your distributor. You must provide a Customer Support case number (call the phone number above to obtain one) to your distributor to complete the return process.Outside United StatesPlease contact your local Rockwell Automation representative for the return procedure.Rockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, Tel: +90 (216) 5698400。
Sporlan S3C Firmware Update via iPhone说明书
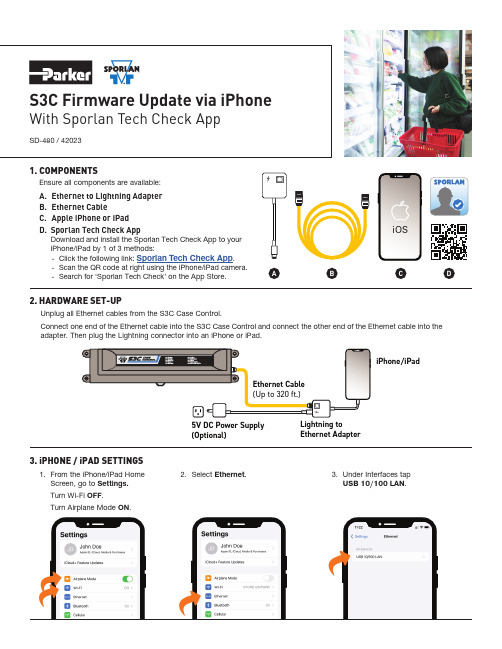
PONENTSEnsure all components are available:A.Ethernet to Lightning AdapterB.Ethernet CableC.Apple iPhone or iPadD.Sporlan Tech Check AppDownload and install the Sporlan Tech Check App to your iPhone/iPad by 1 of 3 methods:-Click the following link: Sporlan Tech Check App .-Scan the QR code at right using the iPhone/iPad camera.-Search for ‘Sporlan Tech Check’ on the App Store.5V DC Power Supply (Optional)Ethernet Adapter2.HARDWARE SET-UPUnplug all Ethernet cables from the S3C Case Control.Connect one end of the Ethernet cable into the S3C Case Control and connect the other end of the Ethernet cable into the adapter. Then plug the Lightning connector into an iPhone or iPad.3.iPHONE / iPAD SETTINGS1. F rom the iPhone/iPad Home Screen, go to Settings.Turn Wi-Fi OFF .Turn Airplane Mode ON .A 2.Select Ethernet .3.Under Interfaces tapUSB 10/100 LAN .SD-480 / 42023This document and other information from Parker Hannifin Corporation, its subsidiaries and authorized distributors provide product or system options for further investigation by users having technical expertise.The user, through its own analysis and testing, is solely responsible for making the final selection of the system and components and assuring that all performance, endurance, maintenance, safety and warningrequirements of the application are met. The user must analyze all aspects of the application, follow applicable industry standards, and follow the information concerning the product in the current product catalog and in To the extent that Parker or its subsidiaries or authorized distributors provide component or system options based upon data or specifications provided by the user, the user is responsible for determining that such data Page 2 – SD-4803. iPHONE / iPAD SETTINGS (Continued)。
Manfrotto DIGITAL DIRECTOR 固件更新与恢复指南说明书

DIGITAL DIRECTOR – Firmware Service ProceduresChapter.1 Manual Firmware UpdateChapter.2 Manual Firmware RestoreChapter.1 Manual Firmware UpdatePurposeThis procedure is intended to manually update DIGITAL DIRECTOR firmware in case the device cannot longer be used with the iPad and/or the automatic process through the Digital Director app cannot be completed.The update sequence must be followed carefully in order to prevent any errors or issues that could potentially damage the unit.RequirementsYou will need the following to complete the procedure:∙DIGITAL DIRECTOR (models MVDDA13, MVDDA14, MVDDM14)∙PC or MAC∙Internet connection∙USB memory stick (Empty, FAT32 format, single partition)PreliminaryVisit and download the latest available firmware from the DIGITAL DIRECTOR product page to your computer.Clean the USB memory stick and copy the “cfu” update file only onto it.Disconnect any other device from DIGITAL DIRECTOR (iPad, camera).Update sequence∙Power DIGITAL DIRECTOR using fresh batteries or the AC adapter provided ∙Turn DIGITAL DIRECTOR OFF using the power button (1)∙Insert the USB stick containing the updated file into the USB connector (2) ∙Turn DIGITAL DIRECTOR ON and check that the DIGITAL DIRECTOR LED Indicator (3) changes in the following sequenceo Lit solid greeno Lit blinking redo Lit solid red∙At this point remove the USB stick, the LED Indicator will turn solid green ∙Wait until the LED Indicator starts blinking green∙Turn DIGITAL DIRECTOR OFFChapter.2 Manual Firmware RestorePurposeThis procedure is intended to manually restore DIGITAL DIRECTOR firmware to its factory default setting in the event of the unit becoming unresponsive as a result of an error during the update processThe restore sequence must be followed carefully in order to be successful. RequirementsYou will need the following to complete the procedure∙ DIGITAL DIRECTOR (models MVDDA13, MVDDA14, MVDDM14)∙ A narrow plastic pin (recommended size is Ø 1.5-2.0mm, minimum length 8mm ) PreliminaryDisconnect any other device from DIGITAL DIRECTOR (iPad, camera).Restore sequence∙Power DIGITAL DIRECTOR using fresh batteries or the AC adapter provided∙Turn DIGITAL DIRECTOR OFF using the power button (1)∙Insert the plastic pin into the reset button hole, pressing the reset button inside it (2) ∙While keeping the reset button pressed, turn DIGITAL DIRECTOR ON and check that the DIGITAL DIRECTOR LED Indicator (3) changes in the following sequence o Lit solid greeno Lit solid redo Lit blinking red∙At this point release the reset button and remove the plastic pin; the LED Indicator will continue to blink for a few more seconds∙Wait until the LED Indicator turns green, initially solid and then blinking∙Turn DIGITAL DIRECTOR OFFDISCLAIMERThe information contained in this document is subject of change without notice.Manfrotto makes no warranty and shall not be liable for any errors on information contained in this document. iPad is a trademark of Apple Inc.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DEVIATION说明书第一版前言年初购入devo10,那个论坛成为神控的遥控器。
神控处了这个控的硬件可圈可点外,最重要的一点就是刷入deviation(官网,英文的)这个固件后兼容dsm2等多种主流的制式,实现一控多种接收共用。
而且其开放的平台,能够不断升级增加功能,更有suv等大大的不断奉献,至此deviation 版本走了3.1版,链接/thread-241130-1-1.html感谢各位模友大大的无私奉献,我有幸用上这个神器。
经过一番专研,翻阅说明书后终于大概了解如何设置和运用,deviation的自由度很高,各个通道均可以自定义,让你打造属于自己的控,用起来随心所欲。
里面的混控器是属于底层的混控,自由度很高,不过的确需要一段时间来理解,如果学会了会觉得很好用的,想怎混就怎混。
由于官方说明书是英文的,而且不是说得很明白,加上经常有模友问及如何设置,于是本人萌生出写一下中文说明书的念头,再加点应用例子,务求各位模友更易明白上手,而且通过大家的讨论还能加深本人对这个固件的认识,达到共同进步的目的。
一下都是本人自己的认识跟见解,如有问题请提出来大家切磋讨论。
hilitiQ群:2954863552013年8月22日主界面这个是开机后的主界面,在这里吐槽一下我见过的devo10屏幕贴上都是有灰的,难道厂里贴膜的那个车间就在矿里?至少这一点学一下天地飞吧,出厂膜漂亮得很。
以下是菜单设置,首先是主菜单,这个没什么好说的,很简单明白通用模式进入模型设置,如果之前接触过遥控的话,这些名词也是很清楚明白的,如果还没有搞明白的话,潜水去吧骚年~~好了,现在进入模型设置里面的模型设置菜单(控上是这样写的,不要怪我),第一个模型文件那里,看到黑色部分左右会有箭头的是可以进行左右选择,这里会有读取,复制,模板,重置4个选项。
读取完后不用重启就可以马上工作了。
复制就是把现有模型设置拷贝到另一个模型文件,模板是控自带的设置模板,里面已经有一些预先调好的参数,重置就是格式化~~这个模型文件恢复出厂设定模型类型那个选项可以选择固定翼跟直升机,如果选择直升机的话可以按ent 进入进行斜盘设置跟斜盘的混控比率调节功率调节,越大就越远(傻子都懂),原厂最大好像是100mw,华科尔提供的小日本版本固件的最大10mw。
官网有下载,喜欢的可以去试一下。
教练功能暂缺,没有试过,不会用也就不会教了,见谅。
欢迎补充。
再下面是重点功能之一,通讯协议选择,可以选devo,wk系列,dsm2,ppm 等,选择好对应的协议后对频前把固定id吗那个删掉,我知道的devo接收不删掉是对不上频的。
玩模拟器用ppm模式。
设置界面会有通用模式,高级1,高级2选择,各界面的功能大部分都是共用的,也就是大部分功能你用哪种界面都能设置,只是位置跟设置方式不一样。
喜欢用那个界面就随便了,反正习惯就好。
这里有一个疑问,从高级界面调到通用界面的时候有时候会提示“无效的通用模型设置,是否重设”,选确定的话会有些设置恢复到初始设定,例如飞机类别,通道顺序,所以这个选项一定要小心,我试过调机时按确定后油门马上上来了,幸好是涵道机,否则就会光荣负伤了。
这个是通用模式的舵量/曲线菜单,第一项是通道选择,副翼,升降,方向,往下依次是各个飞行模式下的舵量曲线调节,飞行模式的切换默认是右边角的fmod开关。
通用模式下的混控菜单输入是指信号的输入通道,只可以是摇杆,开关通道,这里有一点,开关通道会有AIL DR0,AIL DR1这些,意思是AIL这个开关在0的位置上,AIL DR0这个输入会是100,而AIL DR1输入是-100,如果AIL开关在1位置上,AIL DR0的输入是-100,AIL DR1输入是100。
也可以这样理解,开关在哪个位置,哪个位置的输入就是100,相同开关的其他位置输入则是-100,刚接触的朋友可能要花点时间理解。
因为一个开关可以映射成2个甚至3个输入通道。
输出通道就是指信号混控后的输出通道,很好理解开关就是指这个混控生效的开关,无就是指一直生效。
保存后到这个界面,曲线有两段跟9点两种。
两段就是把输入信号从0点分开,负数就固定输出一个值,正数就输出另一个值。
屏幕第一行显示输入通道跟输出通道的名称还有相对应的数值。
9点曲线就跟舵量曲线差不多了,可以设置混控的比率,而且比率可以随便调节,不像两段曲线那样是固定的值了。
那个坐标横轴代表输入通道,纵轴表示输出通道,黑点表示当前的位置。
这里输入通道是副翼,我打一下副翼摇杆,坐标点就跟随运动,注意屏幕第一行数值的变化定时器有3种,倒计时是可以设置提醒功能的,差不多了就会响跟振动,秒表跟持续计时的确别好像是秒表能清零(倒计时跟秒表在主界面时按右边的L键就会清零),且持续计时关控再开是不会清零的,清零要到计时器那里按重置。
定制主页面微调有4内,4外,6微调显示,是指微调那个指示器位于主界面的位置。
6微调多出来的2个微调项是什么,我至今仍未搞明白,望赐教。
第一至第八栏就是显示一些通道信息,回传信息,定时器之类的,如果5-8不设置的话右边会显示飞机的图标,如果有设置的话飞机图标就没了,那个位置就显示5-8项的内容。
开关那里可以自己选择需要显示的开关跟对应状态的图标,进去选择菜单那里,up,dn按钮选择开关的状态,L,R按钮选择对应状态的图标。
还有补充一点,那个尾舵的意思是指GEAR那个开关。
刚开始我也搞不懂,什么尾舵0,尾舵1。
就是指GEAR的0跟1状态。
快捷菜单是指屏幕在主菜单时,长按up或者dn键就会直接弹出快捷菜单了,方便大家调用一些常用的设置界面。
高级模式1这里开始就是介绍高级模式1的菜单了首先是混控功能,高级菜单1的混控功能是以输出通道为菜单的,例如升降通道,1-升降那里是调节升降通道的基础参数,如:正反转,内微调,舵机行程等,后面多段式那个是调节混控的,进去后会有:无,一段式,三段式,多段式,ccpm1-3等选择。
本人未曾使用过这个混控,所以不便教授大家。
希望会用的人补充。
高级模式1的微调,我这里拿出来说是因为我发现有一个特别的功能。
有模友说刷固件后微调好像不起作用。
其实微调作用是有的,只是微调的幅度太小了,一直微调打到底行程仍然未够,如果觉得微调幅度小的朋友吧这个微调幅度调大,我习惯调到0.5,就会发现微调好很多了。
高级模式2混控我这个比较上手,就拿这个来说,左边的通道是输出通道,devo接收对应的是升降,副翼,油门方向;dsm2接收对应的是油门,副翼,升降,方向。
所以如果换接收类型后需要调整通道顺序。
右边的是现在该通道对应的输入,下图是devo接收的默认输入顺序。
选择通道1,进入混控菜单。
默认是有几个混控菜单的,那个是大小舵用的,不喜欢可以删掉。
这里新建一个混控,出现下图的界面,输入通道是指这个通道(下图是指通道1,devo接收的升降通道)的信号源通道,可以是摇杆,开关,也可以是其他输出通道,例如通道2。
为什么会有通道2,后面再用例子讲解。
输出通道是固定的,不能更改,要更改输出通道就请回上一级菜单。
开关是指这个混控生效的开关。
Ccpm应该是直升机斜盘的混控,我没试过。
保存后会到下图的界面,输入,开关也可以重新更改曲线是指混控的比例,有等比例,固定,上下限等很多种,具体要看用途选择作用有替换:如果这个通道上存在其他混控的话,只运行这个混控,其他的失效。
相乘:通道的输出值会是这个混控的值跟上一个混控的值相乘。
附加:通道的输出值是这个混控的值加上上一个混控的值。
最大:通道的输出值取这个混控跟上一个混控的最大那个。
最小:通道的输出值取这个混控跟上一个混控的最小那个。
I/O:实时显示输入跟输出的值是否微调:是的话,输入信号的微调也会应用于输出信号上,否的话,输入信号微调并不影响输出信号。
比例:输入跟输出信号的比率,需要结合曲线,正数是正比例,负数是反比例偏移:整个混控曲线往一个方向移动。
例如:等比例的曲线,比例为50,不偏移的情况下I是-100,0,100 对应的O的值是-50,0,50。
如果偏移25,那么相同的I值对应的O值是-25,0,75。
速率:舵机动作的快慢,0是不改变速率,1舵机动作最慢,250动作最快关于虚拟通道:个人理解,虚拟通道应该是作为混控的一个中间通道来使用,由于虚拟通道并没有实际输出,他的输出值只能是作为其他实体通道的输入数值来使用,也就是两个混控叠加的使用使用的。
我的飞机还没有这么高级别去使用虚拟通道混控啊。
有使用例子的请告诉我。
Devo接收通道2对应副翼的摇杆,那么混控输入选副翼跟选通道2有什么不同呢?这里举一个例子:某飞机的升降舵是分左右两个舵面的,需要2只舵机控制,这两个舵机接的通道1跟通道5,通道5混控通道1来实现。
由于2个舵机安装位置限制,只能采取反向信号,也就是通道1跟通道5的比例需要-100,通道1值是100时通道5的值是-100。
如果用升降作为通道5的输入的话,正常情况下没有问题的。
但如果升降进行微调的话,比如调高10,那么通道1跟通道5都是同时调高10,注意:通道5也是调高10,微调并没有应为通道5跟升降的-100比例而成为微调-10。
这样通道1微调后中位会是10,而通道5也是10。
当通道1满舵数值最大时110(100+微调10),通道5的数值是-90(-100+10)。
具体就是按微调的话左右两个舵面并不会同时上升或下降,而是错开,微调越多,错开越多了。
如果用通道1作为通道5的输入的话,那么通道1微调10后的值是10,通道5跟通道1比例是-100,这样通道5的值会是-10。
满舵时通道1的值是110,对应的通道5的值是-110。
具体就是左右舵面微调时会同时上升跟下降了。
这个例子说明了,微调的数值并不会因为混控的关系而改变,而是单独附加在混控后的数值上的。
通道基本设置的菜单,没什么好说的,只有一点,那个通道2前的感叹号表示的是这个通道是反的。
调整通道顺序,up,dn键调左边,r,l键调右边。
那个通道数表示的是输出的通道,也就是接收机的通道,括号那个是输入信号的通道。
下图表示接收机的1,2通道都是接收副翼的信号。
左边中间那个通道1是指要被复制的输出通道,例子:如果通道1需要改为油门通道作为输入,那么可以把右边光标移到油门,按一下通道1下面的复制,那么通道1的输入就会变成油门了。
不过这样做的话通道1本来的输入通道会没有了。
如果你只想调整通道顺序的话就不要用复制,直接上移下移就可以了。
调好顺序后记得按保存才会生效,不保存退出的话就是白干了。
后话好了,写了这么多,本人懂的已经是奉献完毕了。
不懂的,不对的还望大家赐教。
遥控的设置部分比较通俗易懂,暂不打算写说明了。
不明白的同学潜水去吧。
或者问我也是可以的,我会知无不言,言无不尽。
这是第一版,赶了个晚上搞出来的。