自适应滤波器设计与Matlab实现
自适应滤波器原理及matlab实现

自适应滤波器原理及matlab实现一、自适应滤波器概述自适应滤波器是一种特殊的滤波器,它能够根据信号的变化自动调整自身的特性,以更好地处理信号。
自适应滤波器在许多领域都有广泛的应用,例如通信、信号处理、语音识别等。
二、自适应滤波器原理自适应滤波器的原理基于最小均方误差(MMSE)准则。
它通过不断调整自身的系数,使得输出信号的误差最小,从而更好地匹配输入信号。
自适应滤波器的性能取决于其系数和输入信号的特点,因此需要根据不同的应用场景选择合适的滤波器。
三、MATLAB实现以下是一个简单的自适应滤波器的MATLAB实现示例:```matlab%定义系统参数n=100;%信号长度alpha=0.01;%学习率w=randn(1,n);%滤波器系数x=randn(n+1,1);%输入信号y=zeros(n+1,1);%输出信号e=zeros(n+1,1);%误差信号%自适应滤波器算法fori=1:ny(i)=w*x(i+1)+e(i);%输出信号e(i)=x(i+1)-y(i);%误差信号w=w+alpha*(x(i+1).^2-y(i).^2)*w-alpha*x(i+1)*e(i);%更新滤波器系数end%绘制滤波器系数随时间变化曲线plot(real(w),'b');holdon;plot([min(x),max(x)],[min(y)-3*std(y),max(y)+3*std(y)],'r');holdoff;xlabel('Time');ylabel( 'FilterCoefficient');legend('FilterCoefficient','SignalError' );gridon;```这段代码实现了一个简单的自适应滤波器,它根据输入信号不断调整自身的系数,以达到更好的匹配效果。
在代码中,我们使用了MATLAB的内置函数和矩阵运算来实现自适应滤波器的算法。
自适应滤波器MATLAB仿真
自适应滤波器MATLAB仿真摘要:本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS(Least mean squares)算法。
以一个例子演示了自适应滤波器的滤波效果。
实验结果表明,该滤波器滤波效果较好。
关键词:自适应滤波器 MATLAB7.0 LMS算法Simulate of adaptive filter based on MATLAB7.0Abstract:This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single.Key words:LMS algorithm Adaptive Filter Matlab7.01 引言由Widrow B等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。
由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。
自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。
本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。
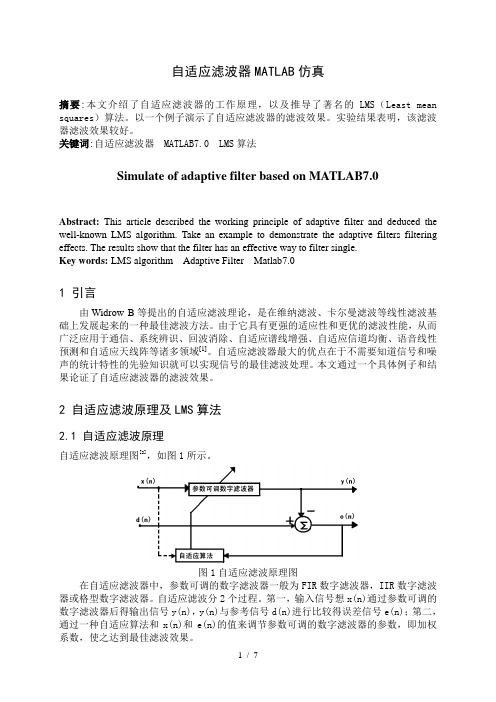
2 自适应滤波原理及LMS算法2.1 自适应滤波原理自适应滤波原理图[2],如图1所示。
图1自适应滤波原理图在自适应滤波器中,参数可调的数字滤波器一般为FIR数字滤波器,IIR数字滤波器或格型数字滤波器。
自适应滤波分2个过程。
第一,输入信号想x(n)通过参数可调的数字滤波器后得输出信号y(n),y(n)与参考信号d(n)进行比较得误差信号e(n);第二,通过一种自适应算法和x(n)和e(n)的值来调节参数可调的数字滤波器的参数,即加权系数,使之达到最佳滤波效果。
自适应卡尔曼滤波matlab

自适应卡尔曼滤波matlab自适应卡尔曼滤波(Adaptive Kalman Filtering)是一种常用的估计和滤波技术,常用于处理不确定性和噪声存在的系统。
在这篇文章中,我将详细介绍自适应卡尔曼滤波的原理和应用,并探讨如何在MATLAB中实现该算法。
自适应卡尔曼滤波是卡尔曼滤波器的一种扩展形式,它通过动态调整滤波器的参数,以适应不断变化的系统条件和噪声水平。
与传统的卡尔曼滤波相比,自适应卡尔曼滤波具有更好的鲁棒性和适应性。
自适应卡尔曼滤波的关键思想是根据观测数据的特点动态调整系统模型的参数。
在传统的卡尔曼滤波中,系统模型的参数通常是固定的,但在实际应用中,系统的动态特性和外部环境的变化可能导致模型参数的不确定性。
自适应卡尔曼滤波通过监测观测数据的统计特性,自动调整系统模型的参数,以提高滤波器的性能。
在MATLAB中实现自适应卡尔曼滤波可以分为以下几个步骤:1. 定义系统模型:首先需要定义系统的状态变量、测量变量以及系统的状态转移方程和测量方程。
这些方程描述了系统的动态特性和观测模型。
2. 初始化滤波器:在开始滤波之前,需要初始化滤波器的状态向量和协方差矩阵。
状态向量表示系统的状态变量,协方差矩阵表示对状态变量估计的不确定性。
3. 预测步骤:根据系统的状态转移方程和当前的状态估计,进行状态的预测。
预测的结果是对系统下一时刻状态的估计。
4. 更新步骤:根据测量方程和当前的观测值,更新状态估计和协方差矩阵。
更新的结果是对系统当前状态的更准确估计。
5. 自适应调整:根据观测数据的统计特性,自适应地调整滤波器的参数。
这个步骤是自适应卡尔曼滤波与传统卡尔曼滤波的主要区别之一。
自适应卡尔曼滤波在许多领域都有广泛的应用。
例如,在目标跟踪中,通过自适应调整滤波器的参数,可以更好地适应目标运动的变化和观测噪声的不确定性。
在信号处理中,自适应卡尔曼滤波可以用于去除信号中的噪声和干扰,提高信号的质量。
自适应卡尔曼滤波是一种强大的估计和滤波技术,能够有效处理不确定性和噪声存在的系统。
MATLAB课程设计自适应中值滤波
采用快速排序算法,提高滤波速度 引入自适应阈值,提高滤波效果 采用并行计算,提高滤波效率 引入图像分割技术,提高滤波精度
课程设计任务和要 求
提 高 M AT L A B 编 程 能 力 掌握自适应中值滤波算法 提高问题解决能力 培养团队合作精神
掌握MATLAB的基 本语法和编程技巧
理解自适应中值滤 波的原理和实现方 法
添加标题
M AT L A B 实 现 自 适 应 中 值 滤 波 : 可 以 使 用 M AT L A B 中 的 i m f i l t e r 函 数 来 实 现 自 适 应 中 值 滤 波 , 该 函数可以方便地实现各种类型的滤波操作。 A B 图 像 处 理 工 具 箱 广 泛 应 用 于 图 像 处 理 、 计 算 机 视 觉 、 模 式 识 别 等 领 域 。
自适应中值滤波算 法介绍
中值滤波是一种非线性滤波技术,通过计算像素邻域的中值来代替像素值,以消除噪 声和模糊图像。
中值滤波可以有效地消除椒盐噪声和随机噪声,但对高斯噪声和脉冲噪声的抑制效果 较差。
中值滤波的缺点是会导致图像细节的丢失,特别是在处理边缘和纹理区域时。
自适应中值滤波是一种改进的中值滤波算法,可以根据图像的局部特性自适应地调整 滤波器的参数,以更好地保留图像的细节和边缘。
添加项标题
函数定义:使用符号"function"进行函数定义,如 "function y = f(x)"
添加项标题
赋值语句:使用符号"="进行赋值,如"x = 1"
添加项标题
条件语句:使用符号"if"、"elseif"、"else"进行条件判断, 如"if x > 0"
自适应滤波器的设计与实现
2.
凡是有能力进行信号处理的装置都可以称为滤波器。在近代电信装备和各类控制系统中,滤波器应用极为广泛;在所有的电子部件中,使用最多,技术最复杂要算滤波器了。滤波器的优劣直接决定产品的优劣,所以,对滤波器的研究和生产历来为各国所重视。
滤波器是一种用来消除干扰杂讯的器件,将输入或输出经过过滤而得到纯净的交流电。您可以通过基本的滤波器积木块——二阶通用滤波器传递函数,推导出最通用的滤波器类型:低通、带通、高通、陷波和椭圆型滤波器。传递函数的参数——f0、d、hHP、hBP和hLP,可用来构造所有类型的滤波器。转降频率f0为s项开始占支配作用时的频率。设计者将低于此值的频率看作是低频,而将高于此值的频率看作是高频,并将在此值附近的频率看作是带内频率。阻尼d用于测量滤波器如何从低频率转变至高频率,它是滤波器趋向振荡的一个指标,实际阻尼值从0至2变化。高通系数hHP是对那些高于转降频率的频率起支配作用的分子的系数。带通系数hBP是对那些在转降频率附近的频率起支配作用的分子的系数.低通系数hLP是对那些低于转降频率的频率起支配作用的分子的系数。设计者只需这5个参数即可定义一个滤波器。
关键词:自适应滤波器;LMS算法;FIR结构滤波器;DSP
1
1
滤波技术是信号处理中的一种基本方法和技术,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。从总的来说滤波可分为经典滤波和现代滤波。经典滤波要求已知信号和噪声的统计特性,如维纳滤波和卡尔曼滤波。现代滤波则不要求己知信号和噪声的统计特性,如自适应滤波.自适应滤波的原理就是利用前一时刻己获得的滤波参数等结果,自动地调节现时刻的滤波参数,从而达到最优化滤波。自适应滤波具有很强的自学习、自跟踪能力,适用于平稳和非平稳随机信号的检测和估计。自适应滤波一般包括3个模块:滤波结构、性能判据和自适应算法.其中,自适应滤波算法一直是人们的研究热点,包括线性自适应算法和非线性自适应算法,非线性自适应算法具有更强的信号处理能力,但计算比较复杂,实际应用最多的仍然是线性自适应滤波算法。线性自适应滤波算法的种类很多,有LMS自适应滤波算法、R路自适应滤波算法、变换域自适应滤波算法、仿射投影算法、共扼梯度算法等。
自适应扩展卡尔曼滤波matlab

自适应扩展卡尔曼滤波matlab自适应扩展卡尔曼滤波(Adaptive Extended Kalman Filter,AEKF)是一种用于非线性系统状态估计的滤波算法。
本文将介绍AEKF算法的原理、步骤和实现方法,并结合MATLAB 编写代码进行演示。
一、扩展卡尔曼滤波原理扩展卡尔曼滤波(Extended Kalman Filter,EKF)是一种用于非线性系统状态估计的滤波算法。
它通过使用线性化系统模型的方式将非线性系统转换为线性系统,在每个时间步骤中用线性卡尔曼滤波器进行状态估计。
然而,EKF仅限于具有凸多边形测量特性的问题,并且对线性化过程误差敏感。
为了解决这些问题,AEKF通过自适应更新协方差矩阵的方式提高了滤波器的性能。
AEKF通过测量残差的方差更新协方差矩阵,从而提高了滤波器对非线性系统的适应能力。
AEKF算法的步骤如下:1. 初始化状态向量和协方差矩阵。
2. 根据系统的非线性动力学方程和测量方程计算预测状态向量和协方差矩阵。
3. 计算测量残差,即测量值与预测值之间的差值。
4. 计算测量残差的方差。
5. 判断测量残差的方差是否超过预设阈值,如果超过,则更新协方差矩阵。
6. 利用更新后的协方差矩阵计算最优滤波增益。
7. 更新状态向量和协方差矩阵。
8. 返回第2步,进行下一次预测。
二、AEKF算法的MATLAB实现下面,我们将使用MATLAB编写AEKF算法的代码,并通过一个实例进行演示。
首先,定义非线性系统的动力学方程和测量方程。
在本例中,我们使用一个双摆系统作为非线性系统模型。
```matlabfunction x_next = nonlinear_dynamics(x_current, u)% Nonlinear system dynamicstheta1 = x_current(1);theta2 = x_current(2);d_theta1 = x_current(3);d_theta2 = x_current(4);g = 9.8; % Gravitational accelerationd_theta1_next = d_theta1 + dt * (-3*g*sin(theta1) - sin(theta1-theta2) ...+ 2*sin(theta1-theta2)*(d_theta2^2 + d_theta1^2*cos(theta1-theta2))) .../ (3 - cos(2*(theta1-theta2)));d_theta2_next = d_theta2 + dt * (2*sin(theta1-theta2)*(2*d_theta2^2 ...+ d_theta1^2*cos(theta1-theta2) + g*cos(theta1) +g*cos(theta1-theta2))) .../ (3 - cos(2*(theta1-theta2)));theta1_next = theta1 + dt * d_theta1_next;theta2_next = theta2 + dt * d_theta2_next;x_next = [theta1_next; theta2_next; d_theta1_next;d_theta2_next];endfunction y = measurement_model(x)% Measurement model, measure the angles of the double pendulumtheta1 = x(1);theta2 = x(2);y = [theta1; theta2];end```然后,定义AEKF算法的实现。
MATLAB的自适应滤波器设计
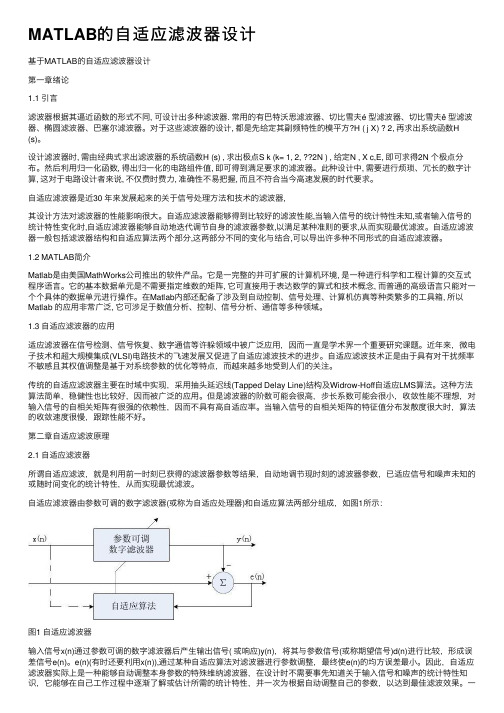
MATLAB的⾃适应滤波器设计基于MATLAB的⾃适应滤波器设计第⼀章绪论1.1 引⾔滤波器根据其逼近函数的形式不同, 可设计出多种滤波器. 常⽤的有巴特沃思滤波器、切⽐雪夫é 型滤波器、切⽐雪夫ê 型滤波器、椭圆滤波器、巴塞尔滤波器。
对于这些滤波器的设计, 都是先给定其副频特性的模平⽅?H ( j X) ? 2, 再求出系统函数H (s)。
设计滤波器时, 需由经典式求出滤波器的系统函数H (s) , 求出极点S k (k= 1, 2, ??2N ) , 给定N , X c,E, 即可求得2N 个极点分布。
然后利⽤归⼀化函数, 得出归⼀化的电路组件值, 即可得到满⾜要求的滤波器。
此种设计中, 需要进⾏烦琐、冗长的数字计算, 这对于电路设计者来说, 不仅费时费⼒, 准确性不易把握, ⽽且不符合当今⾼速发展的时代要求。
⾃适应滤波器是近30 年来发展起来的关于信号处理⽅法和技术的滤波器,其设计⽅法对滤波器的性能影响很⼤。
⾃适应滤波器能够得到⽐较好的滤波性能,当输⼊信号的统计特性未知,或者输⼊信号的统计特性变化时,⾃适应滤波器能够⾃动地迭代调节⾃⾝的滤波器参数,以满⾜某种准则的要求,从⽽实现最优滤波。
⾃适应滤波器⼀般包括滤波器结构和⾃适应算法两个部分,这两部分不同的变化与结合,可以导出许多种不同形式的⾃适应滤波器。
1.2 MATLAB简介Matlab是由美国MathWorks公司推出的软件产品。
它是⼀完整的并可扩展的计算机环境, 是⼀种进⾏科学和⼯程计算的交互式程序语⾔。
它的基本数据单元是不需要指定维数的矩阵, 它可直接⽤于表达数学的算式和技术概念, ⽽普通的⾼级语⾔只能对⼀个个具体的数据单元进⾏操作。
在Matlab内部还配备了涉及到⾃动控制、信号处理、计算机仿真等种类繁多的⼯具箱, 所以Matlab 的应⽤⾮常⼴泛, 它可涉⾜于数值分析、控制、信号分析、通信等多种领域。
1.3 ⾃适应滤波器的应⽤适应滤波器在信号检测、信号恢复、数字通信等许躲领域中被⼴泛应⽤,因⽽⼀直是学术界⼀个重要研究课题。
子带自适应滤波器matlab代码
子带自适应滤波器matlab代码以下是一个简单的MATLAB代码示例,用于实现子带自适应滤波器。
```matlab% 定义参数N = 100; % 信号长度M = 10; % 子带数量alpha = 0.01; % LMS算法步长mu = 0.01; % 子带滤波器步长% 生成信号x = randn(N,1);y = filter([1 0.5],1,x);d = y + 0.1*randn(N,1); % 目标信号% 子带分割subbands = cell(M,1);for i=1:Msubbands{i} = x((i-1)*ceil(N/M)+1:i*ceil(N/M),:);end% 子带滤波器初始化subband_filters = cell(M,1);for i=1:Msubband_filters{i} = filter([1 0],1,subbands{i}); % LMS算法初始化end% 子带滤波器训练for t=1:Nx_t = x(t,:);d_t = d(t,:);for i=1:Mif t <= M*(ceil(N/M))subband_filters{i} =lms(subband_filters{i},x_t,d_t,alpha); % LMS算法训练子带滤波器endx_t = x_t -subband_filters{i}.b*subband_filters{i}.a'*x_t; % 子带滤波器处理ende = d_t - sum(x_t,2); % 误差计算end% LMS算法更新子带滤波器参数function f = lms(f,x,d,alpha)f.a = f.a + 2*alpha*(d - f.b*f.a'*x) * x;f.b = f.b + alpha * (d - f.b*f.a'*x);end```该代码使用LMS算法训练子带滤波器,并使用子带滤波器对信号进行处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自适应滤波器:根据环境的改变,使用自适应算法来改变滤波器的参数和结构。
这样的滤波器就称之为自适应滤波器。
数学原理编辑以输入和输出信号的统计特性的估计为依据,采取特定算法自动地调整滤波器系数,使其达到最佳滤波特性的一种算法或装置。
自适应滤波器可以是连续域的或是离散域的。
离散域自适应滤波器由一组抽头延迟线、可变加权系数和自动调整系数的组成。
附图表示一个离散域自适应滤波器用于模拟未知离散系统的信号流图。
自适应滤波器对输入信号序列x(n)的每一个样值,按特定的算法,更新、调整加权系数,使输出信号序列y(n)与期望输出信号序列d(n)相比较的均方误差为最小,即输出信号序列y(n)逼近期望信号序列d(n)。
20世纪40年代初期,N.维纳首先应用最小均方准则设计最佳线性滤波器,用来消除噪声、预测或平滑平稳随机信号。
60年代初期,R.E.卡尔曼等发展并导出处理非平稳随机信号的最佳时变线性滤波设计理论。
维纳、卡尔曼-波色滤波器都是以预知信号和噪声的统计特征为基础,具有固定的滤波器系数。
因此,仅当实际输入信号的统计特征与设计滤波器所依据的先验信息一致时,这类滤波器才是最佳的。
否则,这类滤波器不能提供最佳性能。
70年代中期,B.维德罗等人提出自适应滤波器及其算法,发展了最佳滤波设计理论。
以最小均方误差为准则设计的自适应滤波器的系数可以由维纳-霍甫夫方程解得式中W(n)为离散域自适应滤波器的系数列矩阵(n)为输入信号序列x(n)的自相关矩阵的逆矩阵,Φdx(n)为期望输出信号序列与输入信号序列x(n)的互相关列矩阵。
B.维德罗提出的一种方法,能实时求解自适应滤波器系数,其结果接近维纳-霍甫夫方程近似解。
这种算法称为最小均方算法或简称 LMS法。
这一算法利用最陡下降法,由均方误差的梯度估计从现时刻滤波器系数向量迭代计算下一个时刻的系数向量式中憕【ε2(n)】为均方误差梯度估计,k s为一负数,它的取值决定算法的收敛性。
要求,其中λ为输入信号序列x(n)的自相关矩阵最大特征值。
自适应 LMS算法的均方误差超过维纳最佳滤波的最小均方误差,超过量称超均方误差。
通常用超均方误差与最小均方误差的比值(即失调)评价自适应滤波性能。
抽头延迟线的非递归型自适应滤波器算法的收敛速度,取决于输入信号自相关矩阵特征值的离散程度。
当特征值离散较大时,自适应过程收敛速度较慢。
格型结构的自适应算法得到广泛的注意和实际应用。
与非递归型结构自适应算法相比,它具有收敛速度较快等优点。
人们还研究将自适应算法推广到递归型结构;但由于递归型结构自适应算法的非线性,自适应过程收敛性质的严格分析尚待探讨,实际应用尚受到一定限制。
自适应滤波器自适应滤波器应用领域编辑自适应滤波器应用于通信领域的自动均衡、回波消除、天线阵波束形成,以及其他有关领域信号处理的参数识别、噪声消除、谱估计等方面。
对于不同的应用,只是所加输入信号和期望信号不自适应滤波器发展前景编辑1、广泛用于系统模型识别如系统建模:其中自适应滤波器作为估计未知系统特性的模型。
2、通信信道的自适应均衡如:高速modem采用信道均衡器:用它补偿信道失真,modem必须通过具有不同频响特性而产生不同失真的信道有效地传送数据,则要求信号均衡器具有可调系数,据信道特性对这些系数进行优化,以使信道失真的某些量度最小化。
又如:数字通信接收机:其中自适应滤波器用于信道识别并提供码间串扰的均衡器。
3、雷达与声纳的波束形成如自适应天线系统,其中自适应滤波器用于波束方向控制,并可在波束方向图中提供一个零点以便消除不希望的干扰。
4、消除心电图中的电源干扰如:自适应回波相消器,自适应噪声对消器:其中自适应滤波器用于估计并对消预期信号中的噪声分量。
5、噪声中信号的滤波、跟踪、谱线增强以及线性预测等。
自适应滤波器设计及Matlab实现摘要本文从随机噪声的特性出发,分析了传统滤波和自适应滤波基本工作原理和性能,以及滤波技术的现状和发展前景。
然后系统阐述了基本维纳滤波原理和自适应滤波器的基本结构模型,接着在此基础上结合最陡下降法引出LMS算法。
在MSE准则下,设计了一个定长的自适应最小均方横向滤波器,并通过MATLAB编程实现。
接着用图像复原来验证该滤波器的性能,结果表明图像的质量在MSE准则下得到了明显的改善。
最后分析比较了自适应LMS滤波和频域维纳递归滤波之间的性能。
本文还对MATLAB里面的自适应维纳滤波函数wiener2进行了简单分析。
关键字:退化图像维纳滤波自适应滤波最陡下降法 LMSAbstractThis paper analyses the basic work theory, performance of traditional filter and adaptive filter based on the property of random noise, and introduce the status quo and the foreground of filter technology. Then we explain basic theory of wiener filter and basic structure model of adaptive filter, and combine the method of steepest descent to deduce the LMS. Afterward according to the MSE rule, we design a limited length transversal filter, and implement by MATLAB. And then we validate performance of adaptive LMS filter by restoring images, Test result show that the quality of the degrade images were improved under the rule of MSE. Finally, we compare the performance of adaptive LMS filter and iterative wiener filter.We also simply analyses the wiener2 () which is a adaptive filter in MATLAB.Keywords:degrade image;wiener filter;adaptive filter;ADF;LMS algorithm目录1绪论 (1)1. 1 引言 (1)1. 2 研究目标及现状 (1)1. 2 .1 图像复原技术的目标 (1)1. 2 .2 图像复原技术的研究现状 (1)2理论基础 (3)2. 1 基本自适应滤波器的模块结构 (3)2. 2 基本维纳滤波原理 (4)3自适应滤波原理及算法 (6)3.1 横向滤波结构的最陡下降算法 (7)3.1.1 最陡下降算法的原理 (7)3.1.2 最陡下降算法稳定性 (10)3.2 LMS滤波原理及算法 (11)3.2.1 从最陡下降算法导出LMS算法 (11)3.2.2 基本LMS算法的实现步骤 (11)3.2.3 基本LMS算法的实现流程图 (12)3.2.4 LMS算法的Matlab实现 (12)3.2.5 wiener2()的原理 (12)3.2.6 LMS性能分析——自适应收敛性 (13)4Matlab 实验结果 (14)4.1.LMS滤波器的收敛性 (14)4.2.LMS滤波器和频域迭代维纳滤波器的性能比较 (16)5总结 (18)致谢 (19)参考文献 (20)附录 A (21)附录 B (22)附录 C (27)1 绪论1.1引言人类传递信息的主要媒介是语言和图像。
据统计,在人类接受的信息中,听觉信息占20%,视觉信息占60%,其它如味觉、触觉、嗅觉总的加起来不过占20%,所以图像信息是十分重要的信息[1]。
然而,在图像的获取和图像信号的传输过程中,图像信号中不可避免的混入各种各样的随机噪声,造成图像失真(图像退化)。
造成人类所获取的信息和实际是有偏差的,成为人类从外界获取准确信息的障碍。
因此,对图像信号中的随机噪声的抑制处理是图像处理中非常重要的一项工作。
在图像的获取和传输过程中所混入的噪声,主要来源于通信系统中的各种各样的噪声,根据通信原理及统计方面的知识,可以知道在通信系统中所遇到的信号和噪声,大多数均可视为平稳的随机过程[15]。
又有“高斯过程又称正态随机过程,它是一种普遍存在和重要的随机过程,在通信信道中的噪声,通常是一种高斯过程,故又称高斯噪声。
因此,在大多数的情况下,我们可以把造成图像失真的噪声可视为广义平稳高斯过程。
本文针对图像信号中混入的随机噪声,在怎样把现有的滤波算法应用到实际的图像复原中去的问题上提出了解决方法,并且应用Matlab 软件编程对图像进行处理。
1.2研究目标及现状1.2.1图像复原技术的目标为了从含有噪声的数据中提取我们所感兴趣的、接近规定质量的图像,我们需要设计一个系统满足:当信号与噪声同时输入时,在输出端能将信号尽可能精确地重现出来,而噪声却受到最大抑制,即最佳滤波器。
1.2.2图像复原技术的研究现状目前的图像复原技术,即去噪的滤波技术可以分为两大类:传统滤波和现代滤波。
传统滤波技术是建立在已知有用信号和干扰噪声的统计特性(自相关函数或功率谱)的基础上的噪声去除;现代滤波技术则是不需要知道图像的先验知识,只是根据观测数据,即可对噪声进行有效滤除。
早在20世纪40年代,就对平稳随机信号建立了维纳滤波理论。
根据有用信号和干扰噪声的统计特性(自相关函数或功率谱),以线性最小均方误差(MSE)估计准则所设计的最佳滤波器,称为维纳滤波器。
这种滤波器能最大程度的滤除干扰噪声,提取有用信号。
但是,当输入信号的统计特性偏离设计条件,则它就不再是最佳的了,这在实际应用中受到了限制。
到60年代初,由于空间技术的发展,出现了卡尔曼滤波理论,即利用状态变量模型对非平稳、多输入多输出随机序列作最优估计。
卡尔曼滤波器既可以对平稳的和平稳的随机信号作线性最佳滤波,也可以作为非线性滤波[2]。
然而只有在对信号和噪声的统计特性已知的情况下,这两种滤波器才能获得最优解。
在实际的应用中,往往无法得到这些统计特性的先验知识,或者统计特性是随时间变化的,因此,这两种滤波器就实现不了真正的最佳滤波。
Widrow B.和Hoff于1967年提出的自适应滤波理论,可使在设计自适应滤波器时不需要事先知道关于输入信号和噪声的统计特性的知识,它能够在自己的工作过程中逐渐估计出所需的统计特性,并以此为依据自动调整自己的参数,以达到最佳滤波效果。