XXX工程无人飞行器展放导引绳施工方案
无人机大跨越区段自主飞行自动展放导引绳的方法

第36卷第7期电力科学与工程V ol. 36, No. 7 2020年7月Electric Power Science and Engineering Jul., 2020 doi: 10.3969/j.ISSN.1672-0792.2020.07.008无人机大跨越区段自主飞行自动展放导引绳的方法许家文,阴酉龙,尚文迪,张太雷,刘小双,雷家杰(安徽送变电工程有限公司,安徽合肥230000)摘要:导引绳展放工作是架空输电线路架线作业的首要步骤。
对于大跨越区段,业内人员一直在寻求一种更加科技化、智能化、便捷化地展放方法。
基于现有的无人机展放方式,提出一种自主飞行自动展放的方法,将无人机航线飞行、远程自动遥控和导引绳展放有效地结合在一起,并通过现场实践对该方法的有效性进行了验证。
结果表明:无人机的自主飞行能够极大地减轻作业人员的负担,提高作业效率,而自动展放使该项工作的自动化水平得到了进一步的提升,验证了所提方法的可行性与有效性。
关键词:无人机;导引绳展放;自主飞行;大跨越中图分类号:TM75 文献标识码:A 文章编号:1672-0792(2020)07-0047-06The Method of UAV Automatic Flight and Guide Rope AutomaticSpread in Long Span CrossingXU Jiawen, YIN Youlong, SHANG Wendi, ZHANG Tailei, LIU Xiaoshuang, LEI Jiajie (Anhui Electric Power Transmission & Transformation Co., Ltd, Hefei 210000, China)Abstract: Spreading guide rope is the first step of the wiring construction. Industry researchers have been looking for a more scientific, intelligent, convenient way to do it in long span crossing. This paper proposed a method of automatic flight and spread which combines the UA V route flight, remote automatic and spreading guide rope based on the existing UA V mode, and its effectiveness was verified by the practical application. The results show that the UA V automatic flight can greatly reduce the burden of operators to increase the efficiency, and the automatic spread further improves the automation level. And the feasibility and validity of the proposed method are verified.Key words: UA V; spreading guide rope; automatic flight; long span crossing收稿日期:2020-05-12作者简介:许家文(1986—),男,硕士研究生,主要研究方向为无人机在特高压输电线路运维中的应用;阴酉龙(1989—),男,硕士研究生,主要研究方向为输电线路施工;尚文迪(1991—),男,硕士研究生,主要研究方向为输电线路施工;张太雷(1995—),男,工程师,主要研究方向为输电线路大跨越区段架线;刘小双(1992—),男,工程师,主要研究方向为无人机视频传输;雷家杰(1995—),男,工程师,主要研究方向为无人机地面站控制。
飞行动力伞展放导引绳施工技术研究
飞行动力伞展放导引绳施工技术研究飞行动力伞展放导引绳的施工工艺在500kV输电架线施工中运用,可以减少对树木的砍伐和农作物的损失,具有良好的经益效益和社会效益,同时可解决放线跨越施工协调难度大、或地理环境导致跨越施工难度大的施工架线问题。
标签:飞行动力伞;展放导引绳施工技术;研究1 总则500kV输电架线施工中在遇到沿线的放线跨越施工协调难度大、或地理环境导致跨越施工难度大时,可采用动力伞展放引绳配合架线施工。
我公司具有成熟的动力伞展放导引绳的施工技术及经验,已在多条线路施工中成功应用。
2 飞行动力伞简介2.1 飞行动力伞的组成动力伞由载人及动力部分与飞行机翼两个部分构成。
飞行动力伞机构只有升降和转弯两部分,操作简单可靠。
2.2 飞行动力伞的特点(1)动力伞具有较高的安全性,能最大程度的确保飞行人员的安全。
(2)动力伞的操作较简便,容易掌握,操作人员只需经过短时间的专业培训即可独立进行飞行。
(3)动力伞起降不需要修建跑道,在较平坦、宽度满足要求的路面即可。
(4)维护比较方便,不用设专门的人员。
(5)由于其本身重量轻,储存运输较方便。
3 动力伞展放导引绳施工工艺3.1 线路现场整备工作直线塔地线横担分别挂好三轮地线(光缆)放线滑车,导线横担上挂好放线滑车;在耐张塔导、地线横担施工挂孔上分别挂好导地线放线滑车。
每基铁塔悬挂指示旗。
耐张、转角塔在地线支架上用2米以上的竹杆布置成羊角型,防止动力伞在展放引绳过程中,引绳滑出塔外。
放线区段内所有跨越物跨越架必须搭设完成。
在牵引场配备一台型号为P40-1H的牵引机,在张力场配备一台型号为T40-1H/1的小张力机,张力牵引展放Φ8迪尼玛绳。
在动力伞展放引绳时,该区段内每基塔位配置的高空作业人员必须在塔上等候。
3.2 动力伞飞行准备工作飞行动力伞起降场地应对场内的尖硬物进行清楚,部分凹凸不平的地方进行平整,确保起飞时,场地两侧应无障碍物。
场地设置在公路上的,请交管部门暂时封闭公路3-5分钟。
XXX线路工程遥控航模无人机展放初引绳施工方案

XXX线路工程特殊(专项)施工技术方案(措施)(遥控航模无人机展放初引绳放线施工)编制单位:XXX工程施工项目部编制日期:批准:年月日技术审核:年月日质量审核:年月日安全审核:年月日编写:年月日目录1、工程简介 (6)1.1、工程概况 (1)1.2、变电所进出线情况 (1)2、导地线参数表 (2)3、引绳牵引方案 (3)4、配套设备的选择 (4)4.1、航模无人机的选择 (4)4.2、机械设备 (5)5、施工流程 (5)5.1、施工方案报审 (5)5.2、施工前的准备 (5)5.3、设备工具进场 (6)5.4、飞行前的检查准备 (6)5.5、试飞 (7)5.6、正式飞行投绳 (7)5.7、终点塔投绳 (8)5.8、回降落场 (9)5.9、升空Φ3.5引绳 (9)5.10、牵引Φ8引绳 (9)5.11、Φ16高强锦纶绳牵引Φ18钢丝绳 (9)5.12、Φ18钢丝绳牵引导线 (9)5.13、危险辨识及分线评价控制措施 (10)6、施工劳动组织 (10)7、安全技术措施 (10)8、应急处理 (11)9、设备及材料表 (12)1、工程简介1.1、工程概况...因线路采用高跨设计,且线路路径均在山区施工,考虑施工经济性,特采用无人机展放初引绳。
2、导地线参数表导线、分流地线、OPGW符合光缆地线主要参数见下表:3、引绳牵引方案根据实际情况和航模无人机放线施工经验,航模无人机的技术性能和经济指标都比较适合本工程导引绳的展放工作,拟采用航模无人机展放引绳方案。
其主要内容是:无人机分段展放两根Φ3.5的高强度锦纶绳,然后首尾相接,通场牵Φ8.0的高强度锦纶绳,牵通Φ8.0的牵引绳以后,再由Φ8.0牵Φ16的高强度锦纶绳,同时带一根Φ3.5引绳。
再用同样的方式牵另一根Φ3.5的牵引绳直至牵通Φ16和Φ3.5各一根,这时候塔上分别有了两根Φ16和两根Φ3.5的牵引绳按此流程循环牵引。
完成一个放线段的展放后,由飞手控制无人机飞回起降场地,进行降落。
展放导引绳
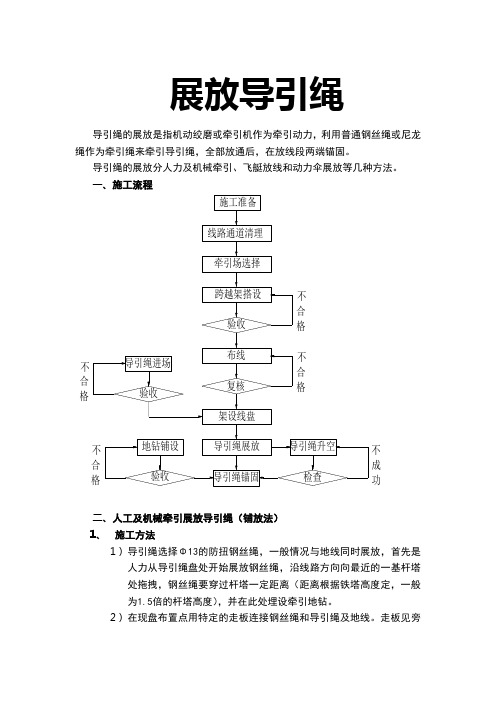
展放导引绳导引绳的展放是指机动绞磨或牵引机作为牵引动力,利用普通钢丝绳或尼龙绳作为牵引绳来牵引导引绳,全部放通后,在放线段两端锚固。
导引绳的展放分人力及机械牵引、飞艇放线和动力伞展放等几种方法。
一、施工流程二、人工及机械牵引展放导引绳(铺放法) 1、 施工方法1) 导引绳选择Φ13的防扭钢丝绳,一般情况与地线同时展放,首先是人力从导引绳盘处开始展放钢丝绳,沿线路方向向最近的一基杆塔处拖拽,钢丝绳要穿过杆塔一定距离(距离根据铁塔高度定,一般为1.5倍的杆塔高度),并在此处埋设牵引地钻。
2) 在现盘布置点用特定的走板连接钢丝绳和导引绳及地线。
走板见旁不合格不成功附图,走板用厚度10mm 的钢板制作,用材料卸扣分别与钢丝绳、导引绳连接起来,地线用专用的蛇皮网套绑扎好再与材料卸扣连接。
双回路分两个回路分别展放。
3) 高空人员带尼龙绳和转向滑车上塔,然后在塔顶挂好滑车,把绳头倒到塔底,地面人员把其余的穿塔用的绳子吊到塔顶,高空人员把所有的尼龙绳放入已悬挂好的滑车内。
4) 用机动绞磨牵引展放好的钢丝绳,把导引绳和地线一起向铁塔处牵引,走板必须有人监视,用Φ14白棕绳横向拉着引连板,以防止连板翻身,避免导引绳、地线缠绞。
接近跨越架时,减慢牵引速度,护线人员随时准备调节走板,使其顺利通过跨越架。
最终牵引至机动绞磨。
在牵引过程中,如果导引绳在地面上被障碍物卡牢,并已形成明显的折弯,应停止牵引进行处理。
导引绳、地线被障碍物卡住时,作业人员必须站在线弯的外侧,并用工具处理,不得直接用手推拉。
5) 铁塔附近没有跨越架的时候正常牵引,如果铁塔附近有跨越架,则钢丝绳不可以从跨越架上直接通过,必须在塔身上挂一个高挂滑车,用尼龙绳把钢丝绳穿过高挂滑车。
其余事宜同上所述。
6) 用事先穿好的尼龙绳将导引绳和地线全部引至铁塔的另一侧,然后再重新接上走板。
穿越时,施工人员不得站在导引绳、地线的垂直下方。
以此类推,直至牵张段的所有铁塔全部放通,导引绳之间用抗弯连接器连接。
无人机放线施工方案

无人机放线施工方案1. 引言无人机的出现在许多领域引起了革命性的改变,其中包括建筑和施工行业。
传统的放线施工方式通常需要人工进行,费时费力且容易出错。
而无人机放线施工方案的引入可以提高施工的效率和精度。
本文将介绍无人机放线施工方案的设计和实施,并讨论其优势和潜在挑战。
2. 无人机放线施工方案的设计2.1 硬件设备无人机放线施工方案需要使用一台具有相应功能的无人机。
这台无人机应该具备以下特点:•定位系统:无人机应当配备高精度的定位系统,例如全球定位系统(GPS),以确保放线施工的准确性。
•电池寿命:无人机的电池寿命应该足够长,以支持较长时间的施工任务。
此外,也需要有足够的备用电池以防止中途耗尽电池。
•传感器:无人机应该配备适当的传感器,如距离传感器和碰撞传感器,以避免意外碰撞和损坏。
2.2 软件系统无人机放线施工方案还需要配备相应的软件系统,以支持施工任务的规划和控制。
以下是软件系统的一些关键功能:•路径规划:通过输入施工区域的地理信息和放线要求,软件系统可以自动生成无人机的飞行路径,确保无人机按照预定的线路进行放线。
•任务调度:软件系统可以对施工任务进行调度和分配,以最大化无人机的利用率和施工效率。
•远程控制:设置一个远程控制中心,可以远程监控和操控无人机,实时调整放线路径或停止任务。
3. 无人机放线施工方案的实施3.1 前期准备工作在实施无人机放线施工方案之前,需要进行一些前期准备工作,以确保施工任务的顺利进行。
这些准备工作包括:•施工区域勘测:对施工区域进行勘测,获取地理信息和相关数据,为路径规划提供准确的基础数据。
•无人机测试飞行:在实际施工之前,进行无人机的测试飞行,验证无人机的性能和稳定性,并进行相应的调整和优化。
•培训和操作指导:对施工人员进行培训,并提供详细的操作指导,确保他们能够熟练运用无人机放线施工方案。
3.2 实际施工过程在进行实际施工过程中,无人机放线施工方案的执行步骤如下:1.根据施工要求,在软件系统中输入地理信息和放线要求。
遥控无人机悬空展放导引绳工艺

遥控无人机悬空展放导引绳工艺熊传龙【摘要】The transmission line is to ensure the normal power transmission based, is also the basic guarantee for normal production of social life,but for now,the problems of transmission line construction is power industry has always been of concern to the focus,is also an important problem, and the electric power construction in the UAV Remote control hanging side process of pilot rope, on the construction development of China's electric power industry bring important significance.%输电线路是保证正常电力输送的基础,也是社会正常生活生产的基本保证,但是对于目前来说,输电线路施工问题是电力行业一直所关注的焦点,也是比较重要的问题,而研究电力施工中的遥控无人机悬空方导引绳工艺,将对我国电力行业的施工发展带来重要的意义。
【期刊名称】《电子测试》【年(卷),期】2015(000)012【总页数】5页(P155-158,144)【关键词】遥控无人机;悬空展放引导绳工艺;分析和探讨【作者】熊传龙【作者单位】广东省输变电工程公司,广东广州,510000【正文语种】中文0 引言电力施工是一直都是电力行业发展过程中的一大难题,主要是由于施工环境过于复杂,从而引发线路走廊的问题,例如在一些森林地区,山区,人工难以进入展放导引绳;于此同时,有时假设还会有一些阻挡的障碍物,例如高速公路、铁路、经济类果园等等,除此之外,城市中的拆迁等问题,都会让导引绳无法实现人工展放,但是运用遥控无人机技术展放工艺则可以很好地解决以上的问题,而笔者将通过本文,就遥控无人机悬空展放导引绳工艺展开研究和分析。
无人机空中展放导引绳技术协议

无人机空中展放导引绳技术协议一、委托单位:(甲方)二、受委单位:(乙方)三、合作内容:受甲方委托,乙方将运用无人机对工程进行空中展放引绳技术服务,此区段总计长度为km。
四、技术要求:1、要求每档放通两根导引绳。
2、,甲方根据导引绳的强度配置过渡引绳的规格。
五、双方职责:(一)甲方:1、甲方负责提供可供无人机起降的场地,并协调有关方面的关系。
2、负责起降场地的安全防范,协调地方关系和处理突发事件。
3、制定放线施工措施。
(乙方提供动力伞放线措施)4、在气候条件不适合无人机飞行的情况下,甲方不得强行要求施工。
若勉强施工,乙方所造成的一切损失由甲方负责赔偿。
5、由于甲方原因造成乙方不能施工或窝工损失由甲方补偿,每天按1000元计算。
6、为很好地配合甲方施工,乙方人员的食宿及费用由甲方提供。
7、甲方需提供一安全可靠的场所供乙方停放汽车和无人机,以及乙方的施工机具、器材等。
8、在无人机放线区段内,为确保施工安全,需要搭设跨越架的区域,甲方要按规定搭设好跨越架。
否则,由此造成的损失由甲方自负。
9、施工完毕后,甲方负责将乙方提供的导引绳、沙包和各种器材、机具等收回,完好地交回给乙方。
ø2.0和ø3.5锦纶绳按每米1元赔偿。
10、甲方应提前7天通知乙方进场,以便乙方作准备和协调进场日期。
11、若甲方在使用乙方提供迪尼玛时出现断裂所引发的一切事故和经济赔偿甲方自负。
(二)乙方:1、乙方负责提供无人机一台和驾驶员及放线员各一名,地勤人员若干名。
2、乙方将初级导引绳安全、平衡地展放两根在每一基塔上方的横档上。
3、乙方负责承担飞行过程中的安全责任及安全注意事项,一切责任均由乙方承担。
六、其他:乙方与甲方协商进场时间:乙方在进场后一般要求在两天的时单间内进行第一次放线施工,甲方要保证做好一切准备并具备放线条件。
如因甲方原因造成窝工,从乙方进场后的第三天起由甲方补偿乙方人员工资100 元/天/人。
乙方飞行完毕后,甲方需要七个工作日内将乙方所提供的工机具及器材完好无损地交给乙方,使乙方具备退场条件。
220kV输电线路工程遥控航模无人机展放初引绳施工组织方案
220kV输电线路工程遥控航模无人机展放初引绳施工组织方案目录一、项目介绍 (1)1.1。
项目概述 (1)1.2.变电站进出线 (1)2.导体参数表 (2)3.绳索牵引方案 (3)4、配套设备的选择 (4)4.1。
航模选型 (4)4.2.机械设备.................................................... (5)五、施工过程 (5)5.1。
建设计划审查申请 (5)5.2.施工前的准备.................................................................. .. (5)5.3.设备和工具的使用方法 (6)5.4.飞行前检查准备 (6)5.5.试飞.................................................... . (7)5.6.官方飞行抛绳................................................ .. (7)5.7.向终点站投掷绳索 (8)5.8.返回着陆点.......................... .. (9)5.9.吊起Φ3.5导绳................................................ .. (9)5.10。
牵引Φ6导绳 (9)5.11。
Φ14 迪尼玛拉绳Φ13钢丝绳................................... .. (9)5.12。
Φ13钢丝绳牵引Φ18钢丝绳 (9)5.13。
Φ18钢丝绳牵引线.................................................................... ..95.14。
危险源识别与分线评价控制措施...............................................................1 06、建筑劳务........................................................................................................................ 组织10七、安全技术措施...................................................................................................................... 1 08. 紧急处理................................................................................................................................ 1 1九、设备及材料表...................................................................................................................... 1 2一、项目介绍1.1。
遥控无人机展放初级导引绳的架线施工中的应用

遥控无人机展放初级导引绳的架线施工中的应用当前在输变电施工工程中,改变原有的人工操作为主的模式,借助先进技术进行一些复杂、危险的施工,例如遥控多旋翼飞行器,也就是无人机技术,实现了覆盖广、应用范围多的目的。
随着输变电技术的不断进步,多旋翼无人机飞行器在作为高科技设备在输电施工中应用取得了很好的效果。
本文就围绕遥控无人机展放初级导引绳的技术应用进行分析,为今后输送电路线施工中运用无人机提供参考。
标签:多旋翼无人机;导引绳施工;技术应用采用多旋翼遥控无人机在输电线路架设施工中,通过初级引导绳的展放,得到了很好的施工效果。
使用多旋翼飞行器展放初级导引绳,造价低、容易操作适合当前技术要求高、技术应用效率高的市场需要。
1、遥控无人机的应用价值随着经济社会的不断发展,环境保护被加以重视,在工程建设上以节约能源、环境友好为目标,开展技术创新,输电线路工程架设施工中对环境破坏最大的是导引绳的展放,传统的展放过程采用人工的方式,需要进行施工通道林木砍伐、线路停运等,造成成本升高、生态环境破坏。
例如进行初级导引绳的展放,采用人共展放的方式工作效率低,还存在很多不安全因素。
运用多旋翼飞行器在导引绳的展放过程中发挥了重大作用。
不仅能够降低能耗,而且对环境给予了保护[1]。
2、多旋翼飞行器展放初级导引绳优势采用多旋翼飞行器的遥控方式,通过专业人员操作多旋翼无人机带动φ2.0锦纶绳作为初级导引绳起飞,沿工程线路前进方向陆续展放初级导引绳,直至初级导引绳全线放通。
通过成熟的遥控操作,在不载人的情况下,保证不会发生任何意外情况,而且不会发生飘飞等危及空中和地面安全。
使用多旋翼飞行器,抗风能力较强,在五级风以下均能进行一般线路的初级导引绳的展放。
对起飞场地的要求低,只要达到4×4米的范围,就能满足要求,不需要跑道、不需要进行青苗赔偿。
多旋翼飞行器能够在空中定点悬停,低空低速运行垂直起降,满足线路施工中应对各种复杂技术条件和地形条件的要求。
220kV输电线路工程遥控航模无人机展放初引绳施工方案

批准(公司总工):年月日技术审核(技术部门):年月日质量审核(质量部门):年月日安全审核(安全部门):年月日编写(项目总工):年月日目录1、工程简介 (1)1.1、工程概况 (1)1.2、变电所进出线情况 (1)2、导地线参数表 (2)3、引绳牵引方案 (3)4、配套设备的选择 (4)4.1、航模无人机的选择 (4)4.2、机械设备 (5)5、施工流程 (5)5.1、施工方案报审 (5)5.2、施工前的准备 (5)5.3、设备工具进场 (6)5.4、飞行前的检查准备 (6)5.5、试飞 (7)5.6、正式飞行投绳 (7)5.7、终点塔投绳 (8)5.8、回降落场 (9)5.9、升空Φ3.5引绳 (9)5.10、牵引Φ6引绳 (9)5.11、Φ14迪尼玛绳牵引Φ13钢丝绳 (9)5.12、Φ13钢丝绳牵引Φ18钢丝绳 (9)5.13、Φ18钢丝绳牵引导线 (9)5.14、危险辨识及分线评价控制措施 (10)6、施工劳动组织 (10)7、安全技术措施 (10)8、应急处理 (11)9、设备及材料表 (12)1、工程简介1.1、工程概况本工程为官滩变-安澜变220kV线路工程(以下简称“220kV官安线”),线路始于220kV官滩变东侧220kV构架北起#1、#3间隔,止于220kV安澜变北侧220kV构架东起#4、#5间隔。
终勘路径总长度为17.564km,其中双回角钢塔架设段约0.544 km,220/110kV混压四回路角钢塔架设段约17.019 km,本期220kV部分双侧挂线,110kV部分不挂线,本期共用铁塔57基,其中双回路终端2基,220/110kV混压四回路角钢塔55基;本工程新建转角塔17基,直线塔40基。
本工程路径示意简图如下:1.2、变电所进出线情况1.1.1、官滩变电站出线情况220kV官滩变为规划建设变电站,根据电气一次专业提供的资料,220kV官滩变出线间隔排列如下:C B A C B A西本工程线路从官滩变东侧220kV架空间隔北起#1、#3间隔采用双回路终端角钢塔向东出线,本期双侧挂线,官滩变220kV出线相序为从线路侧面对出线构架从左至右A、B、C。
无人机放线工艺
无人机放线工艺Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998无人机放线施工工艺传统导线的展放采用人工放牵引绳,再用牵引绳带动导线,让导线沿杆塔展放好,再在杆塔上收紧导线。
这种施工方法需要大量的人工,还需要开辟放线通道,会损坏农作物、砍伐树木,施工难度大且工期长。
动力伞放线危险系数较大,费用高。
本公司采用无人机放线的方式进行导地线的展放,随着技术方案的不断完善,本公司在**等多个工程中采用无人机放线方式施工。
无人机放线能有效的降低安全风险并提高了工作效率;特别是在线路走廊长、地形复杂、地势险要的地区,或者在农田、果园等经济作物生长区,通航的河道,复杂的交通、跨越区,使用无人机放线施工效果更加显着。
无人机放线可以减少对环境的破坏,降低施工成本节省工期。
放线材料的选择选定无人机作为放线工具后,确定放线的一级牵引绳,其性能对无人机的影响很大。
受承载力和牵引力的限制,选用的一级牵引绳必须具有强力高、直径小、重量轻、便于携带及操作等特点。
根据这一特点我们采用迪尼玛绳作为一级牵引绳。
迪尼玛绳是采用迪尼玛高强度聚乙烯纤维,然后运用线体加强工艺制成一种超圆滑敏感的绳。
绳体表面加入了润滑因子,改进了线绳表面的涂层,光滑的涂层使线绳经久耐用,颜色持久,防止磨损和褪色。
其具有以下特点:(1)迪尼玛绳的高抗拉强度可有效提高承载。
其低延伸率可有效控制弧垂,使得承载索在受荷载情况下,弧垂下落尽可能小,保证净空距离满足安全要求。
(2)迪尼玛绳良好的绝缘和防潮性能可保证在带电跨越施工过程中人身和设备的安全。
(3)包护套的迪尼玛绳不受微风振动的影响,不存在断股和强度折减的影响(4)迪尼玛绳材质轻,同等破断拉力强度条件下,迪尼玛绳的每米重量只有钢丝绳的15%,使用迪尼玛绳有利于降低劳动强度,提高工效。
(5)迪尼玛绳良好的耐弯曲疲劳性能、耐磨性、耐候性、防紫外线以及抗化学腐蚀性等特点,有利于在施工中循环使用。
多旋翼飞行器展放I级引绳施工工法

四川蜀能电力公司输变电工程典型施工方法典型施工方法名称:多旋翼飞行器展放导引绳典型施工方法典型施工方法编号:编制单位:四川蜀能电力有限公司推荐单位:主要完成人:四川蜀能电力有限公司工程部二〇一五年目录1.前言......................................................... 错误!未定义书签。
2.本典型施工方法特点........................................... 错误!未定义书签。
3.适用范围..................................................... 错误!未定义书签。
4.工艺原理..................................................... 错误!未定义书签。
5.施工工艺流程及操作要点....................................... 错误!未定义书签。
施工工艺流程................................................ 错误!未定义书签。
操作要点.................................................... 错误!未定义书签。
6 人员组织....................................................... 错误!未定义书签。
7.材料与设备..................................................... 错误!未定义书签。
8.质量控制....................................................... 错误!未定义书签。
9.安全措施....................................................... 错误!未定义书签。
无人直升机展放初导绳施工工艺探讨

5 工 艺 要 点
5 . 1 施 工 准 备
5 . 1 . 1 前 期 T 作 ( 1 )现 场 调 查 。 线路 调 查 应 调 查 当地 的 气 象 条 件 、 地 形 情
4 施 工 作 业 流 程
无人直升机展放导引绳施工作业流程如图 1 所示 。
应对 各 施 工 区段 进 行 实 地 查 看 , 确定 该施工 区段 的起降 场 、 挂
绳场 、 抛绳场 、 应急降落场 。
5 . 1 . 3 铁 塔 朝 天 滑 车 安装 为使 展 放 的初 导 绳 能 顺 利 地 通 过 铁 塔 顶 部 , 需 要在铁塔顶 部 安 装专 用 的朝 天 滑 车 , 滑 车 安 装 在 铁 塔 顶 部 中 间 的位 置 , 一 般 直 线塔 安装 一 个 , 对于横担宽度较大的跨越塔 和耐张塔安装 2 个, 以 防 展 放 后 的初 导 绳 磨 碰 横 担 上 平 面 。 5 . 1 . 4 起 飞 场 地 布 置
( 2 )可操 作 性 强 。轻 松 完 成 悬 停 、 升 降和 左 右 侧 飞 , 较好地 配 合 塔 上 人 员 处 理 初 导 绳 的 操作 。 ( 3 )飞 行成 本 低 。无 人 机 展 放 初 导 绳 具 有 较 好 的 经 济 性 : 起飞场地小 , 节 约 了 占地 面 积 , 可 减 少 场 地 布 置 和 青 苗 赔 偿 费
3 施 工 方 法 特 点
( 1 ) 适 用 范 围 广 。 无 人 机 展 放 初 导 绳 能 适 用 于 起 飞 场 地 小、 地 形 条件 差 、 交 叉跨 越 复 杂 的输 电线 路 作 业 环 境 。4级 风 以 下能满足普通线路展放初导绳的要求 , 在 3级 风 以下 能 适 用 于
无人直升机架线实用工艺

无人直升机架线工艺一、目的直升机展放初引绳工艺属特高压架线技术。
国外由于经济基础好,线路造价高,在发达国家已普遍采用直升机展放导引绳,但在我国并不常见。
我们设计通过采用小型直升飞机展放Ф1、Ф2初级导引绳,再通过绕牵法和逐级牵引的方法,解决了使导引绳不落地、跨越作业不断电条件下施工的问题,给新形势下的线路架线施工提供了良好的借鉴。
二、适用围适合于风速小于5级以下时输电线路工程架线施工初导引绳的展放施工。
三、引用标准文件1.《110~750kV架空送电线路施工及验收规》GB50233-2014;2.《110~500kV架空送电线路设计技术规程》DL/T5092-1999;3.《±800kV架空线路施工及验收规》4.《±800kV直流线路质量检查及评价标准》5.《±800kV架空输电线路力架线施工工艺导则》(报批稿);6.《电力建设安全工作规程(第2部分:架空电力线路部分)》DL5009.2-2004;7.《电力建设安全健康与环境管理工作规定》国家电网工[2004]488号;8. 《超高压架空输电线路力架线施工工艺导则》SDJJS2-87;9. 《高压绝缘子瓷件技术条件》GB772-87;10.《输电线路施工机具设计、试验基本要求》DL/T875-2004;11.《国家电网公司输变电工程安全文明施工标准化图册》;12.《国家电网公司输变电工程安全文明施工标准化工作规定(试行)》国家电网基建[2005]403号;13.国网直流工程建设质量、环境和职业健康管理体系文件;14.国家电网公司、国网直流工程建设有关制度、规定。
四、施工准备1、初导绳选型直升机展放跨越塔至锚塔间的初导绳时,初导绳采用Φ2迪尼玛绳,其破断强度0.44t;单位重量0.00213kg/m(不包套)。
直升机展放跨越塔至跨越塔间的初导绳时,初导绳采用Φ1迪尼玛绳,其破断强度0.11t;单位重量0.000533kg/m(不包套)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
方案编号:XXX工程无人飞行器展放导引绳
施工方案
XXXXX公司
XXXX年XX月
施工方案签名页
1编制依据
效版本。
2 工程概况
2.1 xxx线路工程(以下简称本工程)起自xx变电站,经xxx,止于xxx变电站,线路全长xxxkm。
共xxx基杆塔。
工程施工工期为xxxx年xx月xx日至xxxx年xx月xx日。
2.2本工程放线段布置如表2-1所示。
表2-1 张力放线段布置表
2.3为使本架线区段杆号#xxx~#xxx无人飞行器展放导引绳的施工安全,特编制本施工方案。
2.4 无人飞行器的参数
无人飞行器型号:xxxxx;最大起飞重量:xxxkg,空载重量:xxxkg,载重xxxkg;航程:xxxkm;最大飞行高度:xxxm;巡航速度:xxxxxkm/h。
2.5无人飞行器展放区段划分
由于无人飞行器的有效载重xxkg,展放档距控制在xxxm左右,同时受遥控信号接收限制,所以每次展放长度有限,根据现场实际情况分段放飞,针对每一张力放线的情况划分出每一牵张段落的无人飞行器展放控制区段(见表2-2),必要时进行调整。
表2-2 无人飞行器展放控制区段
3.1 施工组织结构
工作负责人:xxx 电话:xxxxxxxxx
技术负责人:xxx 电话:xxxxxxxxx
安全负责人:xxx 电话:xxxxxxxxx
飞行器操作手:xxx 电话:xxxxxxxxx
施工人员:技工xxx人,辅助工xxx人,共xxx人。
职责:
工作负责人:负责组织、指挥工作班人员安全开展各项工作,完成本工程项目。
技术负责人:负责对本项工作提出技术方案并协助工作负责人解决技术问题。
安全负责人:负责对现场的安全情况进行监督,及时制止违反安规等规章制度的行为和现象。
飞行器操作手:负责现场飞行器的操纵,严格按照飞行操作规定,遵照工作负责人各项指挥指令。
施工人员:服从工作负责人的指挥,按照施工工艺标准按时完成工作负责人所安排的工作。
3.2 施工组织分工
4.1保证安全的技术措施
4.1.1飞行器操作人员必须经过专业培训,持证上岗。
操作前对操作手的安全交底。
4.1.2 超过5m/s的风速以及雨、雪、浓雾天气禁止飞行。
4.1.3飞行器起降及飞行过程中,地面安监人员应疏散围观人员,以免发生意外。
4.1.4 飞行器展放引绳时,飞行人员、指挥人员、塔位人员、地勤人员等通讯信号应保持畅通。
4.1.5 展放过程中,塔上高空人员应站在安全的位置,以免被绳索牵绊。
4.1.6 引绳之间连接必须牢固可靠。
4.1.7 在空气潮湿的气候条件下,φ3.5高强涤纶绳、φ6迪尼玛绳的绝缘强度会降低,应重点注意带电跨越处,防止触电事故的发生。
4.1.8 若导引绳和钢丝绳发生跳槽磨损,必须采取措施重新连接。
4.1.9 对有跨越电力线的绝缘绳必须进行绝缘性能测试,展放前安全部门检查Φ3迪尼玛引绳的绝缘性能(材料部门附有电气试验报告)。
检查引绳的外观情况,摇测其电阻,当两极间距2cm时,其电阻值不小于700兆欧。
4.2 施工步骤及方法
4.2.1 施工前的准备。
4.2.2展放导引绳。
施工单位根据具体施工操作方法具体细化描述,可参照以下内容进行完善:
4.2.1 施工准备
4.2.1.1 完成放线区段内所有跨越物跨越架的搭设。
4.2.1.2 展放引绳工作前,应对放线区段内铁塔逐基挂好滑车,其中地线放线滑车的边门应尽量选择可以活动的,便于展放后的迪尼玛绳放入滑车,并在每基铁塔的中横担上绑扎一个朝天滑车,以便放置迪尼玛绳。
在转角塔和直线转角塔上,根据转角的大小,调整朝天滑车上的调整孔,达到一定的倾斜角度。
倾斜方向朝
转角的内角侧。
4.2.1.3 每基需放线的铁塔应悬挂红旗,作为导航标记。
4.2.1.4 检查飞行器及遥控设备,确认设备完好具备安全飞行条件。
4.2.1.5 确认气候条件符合无人飞行器安全飞行要求。
4.2.1.6 设置摆放引绳盘。
4.2.1.7放线段内每基塔位高空作业人员必须起飞前到达塔位,在塔上等候。
4.2.1.8 塔上高空作业人员及飞行器控制人员使用对讲机进行通讯,通讯频道调整一致,通信畅通。
4.2.2 展放导引绳
4.2.2.1 根据每个放线区段的长度,在飞行器上配置φ3.5高强涤纶绳,绳长应留有裕度。
4.2.2.2飞行器飞到目标塔位经确认后,飞行器降低高度,塔顶等候人员接到绳后,将引绳放入朝天滑车内。
然后飞行器继续沿线路飞行,进行φ3.5高强涤纶绳的展放,并使该绳逐基落于横担或地线支架的朝天轮上,每个区段放通1-2根φ3.5高强涤纶绳。
4.2.2.3 φ3.5高强涤纶绳安全置于各基铁塔横担朝天轮后,铁塔上的高空作业人员及时将φ3.5高强涤纶绳放入放线滑车。
4.2.2.4 利用φ3.5高强涤纶绳牵引φ6迪尼玛绳。
由于中相的特殊性,当φ3.5高强涤纶绳与φ6迪尼玛绳的接头到达每基塔位时,塔上人员应将结头解开,将φ6迪尼玛绳穿过中相滑车,再与φ3.5高强涤纶绳联结,继续牵引。
4.2.2.5 利用φ6迪尼玛绳牵引φ14高强涤纶绳,利用贯通的φ14高强涤纶绳牵引□15导引绳的牵引。
最终,利用已放通中相□15导引绳牵引两地线、三相导线的导引绳。
4.2.2.6 利用中相滑车中的□15导引绳进行进行一牵五的工作,其中两根φ6迪尼玛绳为地线导引绳,另三根φ14高强涤纶绳为三相导线导引绳。
当被牵的导引绳到达每基放线滑车时,铁塔上的高空作业人员将被牵的导引绳解头并穿过地线滑车及两边相导线放线滑车,然后再将五根导引绳头与作为牵引绳的□15钢丝绳连接好,继续牵引直至每基塔引绳顺利通过为止。
4.2.2.7 按正常放线施工程序进行□15导引绳牵放牵引绳的工作。
4.2.2.8 有跨越物的地方必须设置专人进行监护,当飞行器通过前,跨越物监护人必须通知工作负责人,由工作负责人通知飞行操作手及时避开障碍物,保证飞行器与障碍物保持足够的安全距离。
4.3 施工现场布置图(详见附图一)
4.4 主要工器具、仪表及材料配置
表4-1 无人飞行器展放引绳配置表
4.5 施工质量控制措施
4.5.1利用φ3.5高强涤纶绳进行中相φ6迪尼玛绳的牵引时,每基转角塔应采取措施,防止φ3.5高强涤纶绳跳出朝天滑车。
采用迪尼玛绳作为导引绳时,在展放及移入滑车时不能将绳打结或搓绞,以免迪尼玛绳受损。
4.5.2 在收线过程中应注意牵张速度同步,两绳接头过滑车时,塔上人员应及时通知牵、张两场降低牵张速度,以防接头在滑车处跳槽或卡住。
4.5.3牵引过程中导引绳应保持适当的弧垂,尽量降低张力,以导引绳略高于跨越物为宜。
弧垂过小、过大时,塔上人员应及时通知牵张场人员调整牵张速度。
4.5.4 塔上高空人员在各种引绳的牵放过程中,应密切监视各种引绳是否跳槽,跳槽后应马上通知停止牵引,采取措施。
对于上扬塔位,应采取压线滑车压线。
5 施工进度计划
计划施工开始时间:xxx年xx月xxx日至xxx年xx月xx日,共xx天。
6 工作前安全风险辨析与预控
6.1按表6-1以及《架线作业指导书》相关施工要求,结合现场实际情况进行
差异化分析,确定风险等级,现场技术员填写安全施工作业票,安全员审核,施工负责人签发。
6.2施工负责人核对风险控制措施,并在日站班会上对全体作业人员进行安全
交底,接受交底的作业人员负责将风险控制措施落实到各作业任务和步骤中。
表6-1 关键安全风险控制措施和站班会交底关键内容
6.3 在本次展放导引绳施工任务中,经进行风险辨析后,各层级到位分级管控要求如表6-2所示。
6.4 其他安全注意事项
根据现场情况自行补充完善。
7 环境保护措施
根据现场情况自行补充完善。
8 应急预案
8.1 现场应急组织机构
应急负责人: xxx 电话:xxxxxx
应急报告人: xxx 电话:xxxxxx
急救引导人: xxx 电话:xxxxxx
应急司机: xxx 电话:xxxxxx
应急参与人:全体人员
职责:
应急负责人:负责组织指挥现场总体应急工作;
应急报告人:负责将现场情况向医疗机构和分管领导汇报;
急救引导人:负责在路口等候引导医疗机构车辆的到来
应急参与人:服从应急负责人的指挥,按照负责人的安排开展口对口、口对鼻或胸外按压的心肺复苏法对伤员进行抢求。
8.2应急措施
根据现场情况自行补充完善。
8.3现场应急必备物资
车辆一辆
手机或电话一台
应急药箱一个
8.4应急通讯方式
最近的医院名称:xxxxxxxxxxx
最近医院的急救电话:xxxxxxxxxxxx
最近医院的行车线路图:(附图)
全国急救电话:120
全国交通急救电话:122
全国火警急救电话:119
全国匪警急救电话:110
附图一:施工现场布置图
无人飞行器展放引绳过程示意图。