FANUC机器人编程与操作
FANUC发那科机器人操作指南
FANUC机器人操作指南1 机器人程序FANUC机器人程序分为TP、MACRO、CAREL几种类型。
TP为一般程序,用示教器可以创建、编辑、删除。
MARCO为宏程序,在设备调试完成后一般无需添加和编辑,需要时宏程序也可在示教器上创建、编辑、删除。
CAREL为系统自带程序,操作者没有编辑权限。
1.1 Fanuc机器人使用Style方式调用程序,主程序名即为Style X ,标准见表1-1。
1: !STYLE10: CARRIED SERVO WELD ;2: !******************************** ;3: !SAIC Motor ;4: !Station RBS010 - Robot 1 ;带!的语句为程序中的注释 5: !PROGRAM W261 ;6: !******************************** ;127: !ECHO STYLE ; 8: TIMER[1]=RESET ; 9: TIMER[1]=START ;10: GO[1:Manual Style Select]=10 ; 11: RESET WS 1 ; 12: CALL POUNCE1 ;13: CALL S10PROC1 ; 14: RUN CAP_WEAR ; 15: MOVE TO HOME ; 16: TIMER[1]=STOP ;17: WAIT (F[1:Capwear Complete]) ;表1-1 机器人Style 程序标准焊接子程序31.2 焊接子程序S(X)PROC(X)命名,如S10PROC1,其中S10代表被STYLE10调用,PROC1即为焊接PROCESS。
1: !******************************** ;2: !STYLE10: PROCESS1 ;3: !******************************** ;4: !SAIC Motor ;5: !Station RBS010 Robot 1 ;6: !PROGRAM W261 ;7: !******************************** ;8: !BEGIN PROCESS - PATH SEGMENT ;9: SET SEGMENT(50) ;10: UTOOL_NUM=1 ;11: UFRAME_NUM=0 ;12: PAYLOAD[1] ;4。
fanuc发那科 机器人编程手册
fanuc发那科机器人编程手册Fanuc发那科机器人编程手册一、简介Fanuc发那科是世界上领先的机器人制造商之一,其机器人在工业自动化领域有着广泛的应用。
Fanuc发那科机器人编程手册是操作Fanuc发那科机器人的重要工具,通过该手册,用户可以学习机器人编程的基础知识和技巧,掌握机器人的操作方法和编程语言,实现对机器人的灵活控制。
二、机器人编程基础知识1. 机器人的结构和组成:Fanuc发那科机器人由机械臂、控制器、传感器、执行器等多个部件组成,每个部件都有特定的功能和作用。
2. 坐标系和运动控制:机器人的坐标系是确定机器人运动和定位的基础,掌握坐标系的概念和使用方法是进行机器人编程的前提。
3. 程序结构和语法:机器人编程语言包括RSL(Robot Script Language)和KAREL(Fanuc发那科控制器语言),熟悉编程语言的结构和语法可以更好地编写机器人程序。
三、机器人编程技巧1. 运动指令的使用:机器人的运动指令包括直线运动、圆弧运动、旋转运动等,选择合适的运动指令可以实现不同的操作需求。
2. 传感器的应用:机器人的传感器可以提供环境信息和物体检测等功能,合理应用传感器可以增加机器人的灵活性和安全性。
3. 条件判断和循环控制:机器人程序中常常需要进行条件判断和循环控制,熟练掌握条件判断和循环控制的语法和用法可以提高程序的效率和可读性。
四、实例操作和案例分析Fanuc发那科机器人编程手册中通常会包含一些实例操作和案例分析,通过对实际案例的分析和操作,用户可以更好地理解机器人编程的应用和技巧。
1. 实例操作:手册中会提供一些具体的机器人操作场景,例如机器人的物料搬运、焊接、涂装等,用户可以按照手册中的操作步骤进行实践。
2. 案例分析:手册中会提供一些机器人编程案例的分析和解决方法,用户可以通过分析案例来学习问题解决的思路和方法。
五、常见问题和故障排除Fanuc发那科机器人编程手册中还会包含一些常见问题和故障排除的方法和技巧,这对用户在实际应用中遇到问题时进行自我排除和解决非常有帮助。
FANUC发那科工业机器人G76代码使用方法及程序例

FANUC发那科工业G76代码使用方法及程序例一、G76代码简介G76代码是FANUC发那科工业中的一种功能强大的编程指令,主要用于实现末端的精确钻孔操作。
通过合理运用G76代码,可以大大提高生产效率,保证钻孔精度。
下面将详细介绍G76代码的使用方法及程序例。
二、G76代码使用方法1. 确认型号及配置在使用G76代码前,请确保您的FANUC发那科工业型号支持该功能,并且已正确配置相关硬件设备,如钻孔工具、控制器等。
2. 编写G76代码程序O1000;(程序编号)G90 G54;(设置绝对坐标系,选择工件坐标系)G43 H1;(启用工具长度补偿)G76 P1 Q1 R1;(设置钻孔参数)G0 X100 Y100;(移动到钻孔起点)G76 X100 Y100 Z50 R1;(执行钻孔操作)G80;(取消循环)M30;(程序结束)3. G76代码参数说明P:孔径补偿值,单位为mm。
Q:每次进给深度,单位为mm。
R:退刀安全高度,单位为mm。
4. 执行G76代码程序三、G76代码程序实例O2000;(程序编号)G90 G54;(设置绝对坐标系,选择工件坐标系)G43 H1;(启用工具长度补偿)G76 P10 Q5 R10;(设置钻孔参数,孔径补偿10mm,每次进给5mm,退刀安全高度10mm)G0 X100 Y100;(移动到钻孔起点)G76 X100 Y100 Z20 R10;(执行钻孔操作,孔深20mm)G80;(取消循环)M30;(程序结束)四、G76代码注意事项1. 钻孔前检查在执行G76代码前,务必检查工具是否安装正确,工件是否固定牢固,以及钻孔路径是否畅通无阻。
2. 参数调整根据实际钻孔需求,合理调整P、Q、R参数。
过大的孔径补偿会导致工具与工件接触不良,而过小的退刀安全高度则可能引起撞刀事故。
3. 安全监控在程序运行过程中,操作人员应密切关注的运行状态,如有异常立即暂停程序,排查问题。
五、G76代码在实际应用中的技巧1. 多孔加工若需要在工件上连续钻多个孔,可以复制G76代码段,并修改相应的坐标值,以实现快速编程。
FANUC 系列机器人编程作业指导

FANUC系列机器人编程作业指导此篇机器人编程操作指导,主要是针厨房电器公司所生产的产品,而编程则主要运用到直线焊接。
本篇编程作业指导贯彻了直线编程的每一步骤,包括编程中要注意到的细节问题,编程的快速技巧问题等等。
一、进入编程界面如右图所示:为激光发出器的开关按钮,在编程前,必须打开激光发出器以及手动操控界面开关按钮,开机步骤如右图所示:第一步:打开“能量”按钮;第二步:打开“总能量”按钮;第三步:打开“开始”开关按钮。
二、确认激光发出器界面参数激光发出器内部标准参数如下图:第一步第三步第二步三、 创建编程文件在操控界面打开过后,首先先选择程序选择界面(SELECT ),进入程序界面后,然后选择F2按键,即要求创建一个新的程序命令,如下图所示:SELECT 按钮选择F2按钮选择第二条单个字母输入方式,然后相应的从F1,F2,F3,F4,F5按钮中选择字母填写在Program Name 的空格中,然后连续按ENTER 键,创建完成。
四、 程序编制方法首先,脑子里面要对所编制程序的行走路线了然于心,才能快速的编制程序,打个比方,我们现在所要编制的路线如右图:1 3 52 4 6这个路线需要6个点,但程序需要有8条,其中增加了开激光、关激光指令,移动点的指令为:【序号】J P[1] 30% CNT100;焊接点的指令为:【序号】P[1] 20mm/sec FINE;开激光的指令为DO[20]=ON;关激光的指令为:DO[20]=OFF 。
经过上面的认识,上面所走路线的编程程序为:P[1] 20mm/sec FINE DO[20]=ONP[2]20mm/sec FINE P[3]20mm/sec FINE P[4] 20mm/sec FINE P[5]20mm/sec FINE P[6]20mm/sec FINE DO[20]=OFF然后出现此图所示可改变参数 可改变参数可改变参数在机器人的编程操作中,一般在所需要焊接点的程序前需添加三条以上的移动点,第一点是为了定位机器人的原点,其他点是为了让机器人按合理的操作路线行进到所要焊接的点红色点为移动点,绿色点为焊接点,所以上面的程序就变为:P[1] 30% CNT100 注意原点必须定位好移动到焊接点P[2] 30% CNT100P[3] 30% CNT100P[4] 80mm/sec FINEDO[20]=ON 开激光指令P[5]20mm/sec FINEP[6]20mm/sec FINEP[7] 20mm/sec FINEP[8]20mm/sec FINEP[9]20mm/sec FINEDO[20]=OFF 关激光指令P[10] 30% CNT100返回原点P[11] 30% CNT100P[12] 30% CNT100 此处与第一条指令均为原点(同一点)具体编程的操作步骤如下:在编程文件创建后,按ENTER键进入编程区,右图红线所标识的部位只有两种状态,一种是英文字母多时的状态(1状态),一种是英文字母少时的状态(2状态);1状态中,我们只运用到F1指令,里面有移动指令、焊接点指令,如右图中的2、3条指令,把机器人移到想要的点位置以后,然后选择点的类型,按ERTER键,即规定了此点的位置。
FANUC机器人编程与操作
FANUC编程与操作FANUC编程与操作本文档旨在提供有关FANUC编程与操作的详细指导,旨在帮助用户熟悉并有效地使用FANUC。
目录1:引言1.1 编程与操作的重要性1.2 FANUC简介2: FANUC基础知识2.1 结构与组成部分2.2 工具箱与外设2.3 运动学原理3: FANUC编程入门3.1 编程语言概述3.2 程序基本结构3.3 坐标系4: FANUC编程高级技巧4.1 程序流程控制4.2 条件语句与循环结构 4.3 函数与子程序5: FANUC操作技巧5.1 控制面板介绍5.2 操作流程5.3 安全操作与预防措施6:附件6.1 示例程序文件6.2 数据表与技术规范 6.3 常见问题与解决方法附录A:法律名词及注释附录B:术语及缩写解释1:引言1.1 编程与操作的重要性编程与操作是现代工业生产过程中的关键环节。
准确、高效的编程与操作可以提高生产线的自动化程度,降低人力成本,并提升生产效率。
1.2 FANUC简介FANUC是一种高精度、高性能、可靠稳定的工业品牌。
其广泛应用于汽车制造、电子组装、机械加工等领域,具有良好的可编程性和灵活性。
2: FANUC基础知识2.1 结构与组成部分FANUC包含机械结构、控制系统和传感器等组成部分。
机械结构包括臂、关节和末端执行器等。
控制系统由中央处理器、驱动器和编码器等部件组成。
2.2 工具箱与外设工具箱包括夹具、传感器和摄像头等设备,用于辅助完成特定任务。
外设包括控制台、教示器和电源等设备,用于监控和管理运行。
2.3 运动学原理运动学原理是描述运动规律的数学模型。
了解运动学原理可以帮助编程人员理解和掌握的运动规律,从而编写出更加精确和高效的程序。
3: FANUC编程入门3.1 编程语言概述FANUC支持多种编程语言,包括基于图形化界面的 teach pendant 编程和基于文本的程序编辑。
本章将介绍不同编程语言的基本概念和用法。
3.2 程序基本结构FANUC程序由多个指令组成,每个指令都代表的一个动作或操作。
FANUC机器人指令手册:编程操作指南
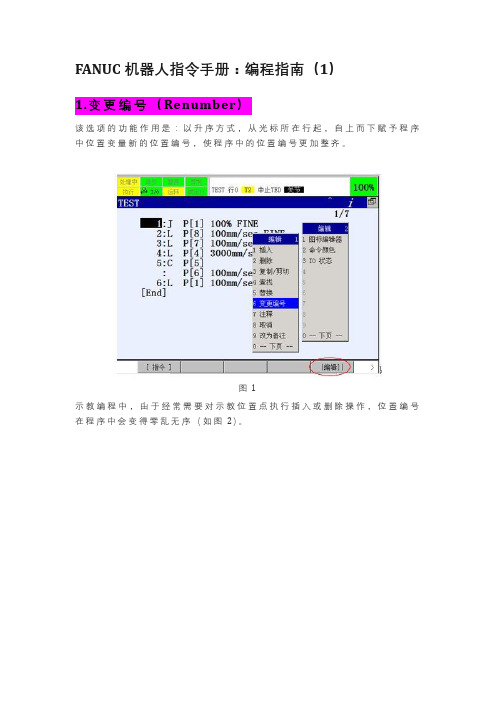
FANUC机器人指令手册:编程指南(1)1.变更编号(Renumber)该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加整齐。
图1示教编程中,由于经常需要对示教位置点执行插入或删除操作,位置编号在程序中会变得零乱无序(如图2)。
图2通过变更编号功能,可使位置编号在程序中依序排列(如图3)。
图3注意:1、变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。
2、变更编号功能只对位置变量P[i]有效,对位置寄存器PR[i]无效。
具体操作步骤:将光标移至程序首行后①选择F5编辑命令;②选择“变更编号”选项;③选择F4“是”(如图4、图5所示)。
图4备注:由于行1与行6中位置变量相同,都为P[1]。
所以,变更编号后两者编号保持一致。
图52.取消(Undo)该选项的功能作用是:可以撤销指令的更改、行插入、行删除等程序编辑操作。
注意:该功能只能撤销上一步操作,不能撤销多次操作。
下文以行删除为例对该功能进行说明。
原程序如图6所示:图6在原程序中删除1-3行后,程序如图7所示:图7通过使用取消(Undo)功能,能够撤销删除操作,恢复已删除行。
具体操作步骤:①选择F5编辑命令;②选择“取消”;③选择F4“是”(如图8、图9所示)。
图8图9取消后,程序如图10所示。
图103.改为备注(Remark)该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。
原程序如图11,图11该程序对应机器人轨迹如图12,图12将原程序2-4行改为备注后,在行的开头会显示“//”。
改为备注的指令在程序运行中相当于被屏蔽,不会被执行。
将2-4行改为备注后,程序如图13,图13改为备注后的程序执行效果如图14,行2至行4指令内容保留,但不被执行。
图14具体操作步骤:①将光标移至需要改为备注的行号位置;②选择F5编辑命令;③选择“改为备注”选项(如图15);④根据提示,下移光标选中目标对象;⑤选择F4“改为备注”(如图16)。
FANUC机器人编程与操作

联系技术支持
如遇到无法解决的故障问题,及时联 系FANUC技术支持团队,获取专业 帮助。
保养周期及建议
日常保养
每天对机器人进行日常清洁和检查,确保 机器人处于良好状态。
年度大保养
每年对机器人进行一次全面检查和保养, 包括更换磨损部件、调整传动间隙、优化
控制系统参数等。
定期保养
根据机器人使用频率和环境条件,建议每 3个月或半年进行一次定期保养,包括更 换润滑油、清洗滤网、检查电气系统等。
05
FANUC机器人维护与保养
日常维护注意事项
清洁机器人
定期清理机器人表面和内部的 灰尘、油污等杂质,保持机器
人清洁。
检查电缆和连接器
检查机器人电缆和连接器的磨 损和松动情况,确保电气连接 正常。
检查关节和传动部件
检查机器人的关节、齿轮、轴 承等传动部件的磨损情况,及 时更换磨损严重的部件。
检查传感器和开关
检查机器人的传感器、限位开 关等安全保护装置的完好性,
确保机器人运行安全。
故障诊断与排除方法
观察故障现象
仔细观察机器人出现的故障现象,如 异常声音、抖动、报警代码等,以便 准确判断故障原因。
查阅技术手册
根据机器人型号和技术手册,查找相 关故障的诊断和排除方法。
使用诊断软件
利用FANUC提供的诊断软件,对机 器人进行故障诊断,定位故障源。
异常捕获与处理
了解FANUC机器人编程中的异常 处理机制,学会编写异常捕获和 处理代码,确保程序的稳定性和 可靠性。
错误诊断与恢复
掌握FANUC机器人编程中的错误 诊断方法,如错误代码查询、日 志分析等,以及相应的错误恢复 策略。
多任务编程实现
多任务概念与原理
FANUC机器人编程(33页)

(System) digital I/O instruction (系統)數字 I/O指令 : R [ i ] = DI [ i ] WAIT DI [ i ] =ON/OFF IF DI[ i ] =ON ,JMP LBL[ j ] DO [ i ] = (value)
FANUC ROBOT 使用教程 (System) digital I/O instruction (系統)數字 I/O指令 : ① WAIT DI [ i ] =ON/OFF
FANUC ROBOT 使用教程
程序中用到的機械手輸入輸出信號說明
機器人輸出信號 (ROBOT OUTPUT) SDO01 SDO02 SDO03 SDO05 SDO07 SDO14 SDO15 SDO16 SDO17 SDO19 信號名稱 MOP: start mold closing MCP:monitoring EJ1:ejector forward ejector back STATIC ION RD04:VAC 1 RD05: UNVAC 1 RD06:VAC 2 RD07: UNVAC 2 SYSTEM READY 信號說明 關模允許信號 ROBOT在射出機干涉范圍 頂針向前 頂針向後 靜電產生 真空1號 吹氣1號 真空2號 吹氣2號 系統准備完了
實例程序說明
FANUC ROBOT 使用教程
RSR0003 1: UTOOL_NUM=0 /* 工具坐標系號碼設為0(為出廠設置) 2:UFRAME_NUM=0 /* 底座坐標系號碼設為0(為出廠設置) 3:IF UO[7]=OFF ,JMP LBL[40] /*如果機器人不在原點,程序跳轉至標簽40 4: 5:LBL[10] /*標簽 10 6:IF UO[7]=OFF ,CALL HOME_POS /*如果機器人不在原點, 呼叫原點程式 7:IF DI[19]=ON ,JMP LBL[40] /*如果在手動狀態,程式跳轉至標簽40 8:IF DI[2]=ON AND DI[6]=ON , :JMP LBL[20] /* 如果射出機已經關模而且處于全自動狀態,則程式跳轉至標簽20 9: 10:JMP LBL[10] /*跳轉至標簽10 11: 12: LBL[20] /*標簽20
FANUC机器人操作说明书
FANUC操作说明书FANUC操作说明书一、简介本操作说明书介绍了FANUC的基本操作和功能,旨在帮助用户了解的使用方法和注意事项。
二、安全操作1. 基本安全知识a. 操作前的准备工作,如穿戴适当的防护装备和确保工作区域清洁整齐等。
b. 操作过程中的安全注意事项,如避免与碰撞和保持安全距离等。
2. 紧急停止和故障排除a. 紧急停止按钮的位置和使用方法。
b. 常见故障排除方法和常见问题的解决办法。
三、控制系统1. 控制系统介绍a. 控制器的结构和功能概述。
b. 控制系统的软件和硬件组成。
2. 操作界面a. 操作面板的功能和操作方法。
b. 控制界面的布局和功能按钮介绍。
四、基本运动1. 运动类型a. 关节运动和直线运动的区别和使用场景。
b. 坐标系和轴的定义和切换方法。
2. 运动指令a. 点位运动指令的用法和语法。
b. 相对运动和绝对运动的区别和应用。
五、任务编程1. 基本编程概念a. 任务的组成和编程语言介绍。
b. 任务的编写规范和注意事项。
2. 任务编辑软件a. 常用任务编辑软件的介绍和使用方法。
b. 任务编辑软件的高级功能和调试技巧。
六、外部设备控制1. I/O接口a. 外部设备的接口类型和连接方法。
b. I/O信号的读取和控制方法。
2. 传感器模块a. 常用传感器模块的介绍和使用方法。
b. 传感器模块与的数据交互方式。
附件:1. FANUC操作安全手册2. FANUC编程示例法律名词及注释:1. :根据《使用安全规范》(GB/T 29434-2012)的定义,是一种可编程多功能设备,包括机械结构、动力系统、控制系统和传感器,能够执行多种相对复杂的任务。
2. 控制器:控制系统的核心部分,负责接收和处理指令,控制的运动和操作。
3. I/O接口:输入/输出接口,用于与外部设备之间的数据传输和控制。
4. 传感器模块:用于检测环境变化和获取外部信息的设备,如视觉传感器和力传感器。
2024版年度FANUC发那科机器人编程指导教程手册

35
装配领域
FANUC机器人在装配领域 的应用也越来越广泛,如 电子产品的装配、机械零 件的组装等。
9
机器人编程方式
示教编程
通过示教器对机器人进行示教,使机器人学习并记 忆动作轨迹和姿态,从而实现自动化作业。
自主编程
自主编程是指机器人根据作业任务和环境信息,自 主规划运动轨迹和姿态,实现自动化作业。这种编 程方式需要机器人具备较高的智能化水平。
背景
随着工业自动化的发展,FANUC 发那科机器人在各个领域得到广泛 应用,编程技能成为机器人应用的 关键。
4
手册内容概述
编程基础
介绍FANUC发那科机器人编程 的基本概念、编程环境和编程语
言。
2024/2/2
编程实践
通过实例讲解机器人编程的具体 步骤和方法,包括搬运、码垛、 上下料、焊接等应用场景。
了解机器人运动速度与加速度的概念,以及它们在机器人 运动控制中的重要性。
16
轨迹规划方法
2024/2/2
点到点轨迹规划
掌握机器人从起始点到目标点的直线或圆弧轨迹规划方法。
多点轨迹规划
了解如何通过多个中间点来规划机器人的运动轨迹,以实现更复 杂的运动需求。
轨迹优化与平滑处理
学习如何优化机器人的运动轨迹,以减少运动过程中的冲击和振 动,提高运动平稳性和精度。
04
调试问题处理
遇到问题时,及时分析原因并采取 措施进行解决,同时记录问题和解
决方案以备后续参考。
29
调试技巧与实例
利用仿真软件进行预调试
在仿真软件中模拟机器人运动轨迹和作业过 程,提前发现并解决潜在问题。
使用变量和参数进行调试
通过修改程序中的变量和参数值,方便地调 整机器人运动轨迹和作业效果。
FANUC机器人编程与操作

FANUC机器人编程与操作首先是机器人的基本构成与工作原理。
FANUC机器人由机械结构、电气系统、控制系统和传感器组成。
机械结构包括臂架、关节、末端执行器等部分,通过电动机和传动装置实现运动。
电气系统包括电源、电机控制器、电缆等,提供驱动力和控制信号。
控制系统通过编程控制机器人的运动轨迹和操作模式,并通过传感器实时监测机器人的状态。
其次是机器人编程语言。
FANUC机器人支持多种编程语言,包括TP、PNS、KAREL等。
其中,TP是机器人系统内置的高级编程语言,用于编写机器人的操作程序。
PNS是一种用于控制机器人的简化程序,类似于流程图,便于初学者理解和使用。
KAREL是一种面向对象的编程语言,更加灵活和复杂,适合高级应用。
在进行编程之前,需要先了解机器人的坐标系与运动计划。
FANUC机器人采用笛卡尔坐标系,通过设定坐标轴和原点来确定机器人的运动范围和轨迹。
运动计划是指根据任务要求,设定机器人的运动速度、加速度和路径规划,以实现准确且高效的运动。
在进行运动计划时,需要特别注意机器人的工作空间和碰撞检测,以保证机器人运动的安全性。
编程完成后,进行机器人操作的准备工作,包括机器人系统的启动和调试。
启动时,需要按照系统要求进行机器人的电源接通、程序加载、伺服驱动等步骤。
调试时,可以利用FANUC机器人系统提供的模拟软件对程序进行模拟操作,以确保机器人的运动轨迹和操作模式正确。
最后,需要掌握机器人的故障排查与维护。
在机器人操作过程中,可能会出现一些故障,如传感器故障、电气故障等,需要及时排查并解决。
此外,定期对机器人进行保养和维护也是必要的,包括清洁、润滑、零部件更换等,以确保机器人的正常运行和寿命。
总之,FANUC机器人编程与操作需要一定的理论与实践知识。
通过掌握机器人的基本构成与工作原理、编程语言、坐标系与运动计划、操作准备、故障排查与维护等方面的知识,可以有效地编程和操作FANUC机器人,提高工作效率和产品质量。
FANUC机器人基本操作指导

FANUC机器人基本操作指导
FANUC机器人是一种多功能的自动化机器人系统,广泛应用于工业生产线中。
本文将为读者介绍FANUC机器人的基本操作指导。
1.机器人的启动和关机
a.启动:首先确保机器人连接到电源并处于关闭状态。
然后按下“启动”按钮,机器人会进行初始化程序,并显示启动界面。
b.关机:在菜单界面上选择“关机”,然后按下“确认”按钮。
机器人将会完成关机程序,并显示已关机。
2.机器人的操作模式
b.自动模式:用于自动化生产,机器人将按照预定的程序和任务进行操作。
c.运行模式:用于执行已经编程好的任务。
机器人将按照程序的要求进行操作。
3.机器人的示教方法
4.机器人的编程
b.KAREL编程:使用KAREL语言进行编程。
KAREL是一种高级编程语言,可以实现更复杂的任务和控制。
c.直接编程:直接在机器人的控制台上进行编程。
这种编程方式适用于简单的任务和指令。
5.机器人的安全操作。
FANUC机器人编程与操作

FANUC机器人编程与操作FANUC机器人编程主要包括离线编程和在线编程两种形式。
离线编程是在计算机上进行的,程序员可以使用FANUC的专用软件来编写和调试机器人程序。
这样,机器人可以在实际操作之前进行测试,从而减少操作过程中的错误和故障。
在在线编程中,机器人程序员会直接与机器人进行交互。
他们可以使用FANUC机器人的控制器,通过编程语言和命令来控制机器人的动作。
对于不熟悉编程的操作人员来说,FANUC机器人还提供了类似于教导示教器的功能,操作人员可以通过手动操作机器人,然后将其动作记录为程序。
在FANUC机器人的操作中,程序员需要设置机器人的工作空间和工具坐标系。
工作空间是机器人可以移动和操作的区域,而工具坐标系是机器人工具或夹具的坐标系。
通过设置这些参数,机器人可以在正确的空间和坐标系中进行操作。
FANUC机器人的编程语言是Karel语言。
Karel语言是一种高级程序设计语言,它使用一系列的指令来控制机器人的动作和功能。
编程人员可以使用不同的指令来移动机器人的各个部分,控制机器人进行加工或装配等任务。
除了Karel语言外,FANUC机器人还支持其他编程语言,如G-code 和Teach Pendant Programming。
这些编程语言提供了更多的灵活性和功能,使程序员能够更精确地控制机器人的动作。
在操作FANUC机器人时,操作人员需要进行必要的安全措施。
他们必须熟悉机器人的操作手册,了解机器人的工作原理和安全规定。
操作人员还需要进行培训,了解如何正确地操作和维护机器人,以减少事故和故障的风险。
总而言之,FANUC机器人的编程和操作是一项复杂而关键的任务。
它需要程序员和操作人员具备专业的知识和技能,以确保机器人能够正常运行和执行所需的任务。
通过正确的编程和操作,FANUC机器人可以提高生产效率和质量,同时减少人力和时间成本。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二 FANUC机器人编程与操作
一、实验目的
1、了解机器人的构成及各组成部分的作用和机器人的用途。
2、掌握机器人的几种坐标系及功能。
3、掌握机器人的编程方式及示教编程。
二、实验设备
FANUC机器人一台(含机械部分和控制部分)、气压站仪态、气动手抓器一个、合金铝块6块。
三、实验原理
1、机器人的构成
机械本体:由6个关节组成,各环节每一个结合处是一个关节点或坐标系。
动力部分:由6台伺服电机分别驱动各关节。
计算机控制部分:用户操作面板、I/O控制接口、示教操作盘、32位CPU。
2、机器人的用途
Arc welding(弧焊),Spot welding(点焊),Handing(搬运),Sealing(涂胶),Painting(喷漆),去毛刺,切割,激光焊接.测量等.
四、实验步骤
1、熟悉机器人的各组成部分及各部分的功能。
2、熟悉机器人的各个坐标系及各坐标系的用途。
图3-1 各坐标系示教
3、熟悉控制面板TP的功能和各个键的作用。
见图3-2。
图3-2 示教操作盘
4、A.开机:给机器人的控制柜和气压站上电并打开控制柜和气压站的开关。
将操作面板上的断路器置于ON
接通电源前,检查工作区域所有的安全设备是否正常。
将操作者面板上的电源开关置于ON
B.关机
通过操作者面板上的暂停按钮停止机器人
将操作者面板上的电源开关置于OFF
操作者面板上的断路器置于OFF
注意:如果有外部设备诸如打印机、软盘驱动器、视觉系统等和机器人相连,在关电前,要首先将这些外部设备关掉,以免损坏
5、用TP控制机器人分别在TOOL坐标系、JOINT坐标系、 XYZ 坐标系、USER坐标系下的
运动情况,并分析有什么不同。
6、学习示教编程的过程及原理。
图3-3 运动指令
7、自己独立完成搬运铝块的示教编程。
1)运动类型
¦ Joint关节运动:工具在两个指定的点之间任意运动
¦ Linear 直线运动:工具在两个指定的点之间沿直线运动
¦ Circular 圆弧运动:工具在三个指定的点之间沿圆弧运动
2)位置数据类型
¦ P:一般位置
¦ PR[ ]:位置寄存器
3)速度单位
速度单位随运动类型改变。
4)终止类型(见图3-4)
图3-4 运动终止类型
5)按下Deadman 开关,将TP 开关置于ON
6)按下SHIFT 键的同时,按示教键开始机器人示教。
SHIFT 键和示教键的任何一个松开,机器人就会停止运动。
注意:示教机器人前,请确认工作区域内没有人。
7)创建程序
8)单步运行程序,调试、修改。
9)连续运行程序,观察运行过程。
五、思考题
1、简述机器人的组成结构。
2、说明各种坐标系及用途。
3、记录编制的搬运铝块程序。