二自由度机械臂控制系统的设计与实现
二自由度机械臂控制系统的设计与实现

二自由度机械臂控制系统的设计与实现一、引言机械臂是一种能模拟人类手臂运动的机电系统,广泛应用于工业生产、医疗辅助、科学研究等领域。
二自由度机械臂是指具有两个关节的机械臂,可以实现在平面内的运动。
本文将介绍二自由度机械臂控制系统的设计与实现。
二、系统架构设计1.机械结构设计机械臂的结构设计非常重要,要能够满足运动需求,并具有足够的稳定性和精度。
对于二自由度机械臂来说,通常采用两个旋转关节来实现运动。
关节的设计应考虑到负载能力、速度、精度等因素。
2.控制器设计机械臂的控制器是实现运动控制的核心部分。
控制器的设计应考虑到对关节运动的控制、轨迹规划、传感器数据采集等功能的支持。
常见的控制器包括伺服控制器、PLC控制器等。
3.传感器选择传感器用于获取机械臂关节位置、速度、负载等参数,是控制系统的重要组成部分。
根据需求可以选择编码器、力传感器等不同类型的传感器。
三、系统实现1.关节控制算法设计关节控制算法用于实现对机械臂关节运动的控制。
常见的控制算法包括PID控制算法、模糊控制算法等。
在设计控制算法时,需要考虑机械臂的动力学模型、非线性特性等因素。
2.轨迹规划算法设计轨迹规划算法用于生成机械臂运动的轨迹。
常见的轨迹规划算法包括直线插值、圆弧插值等。
在设计轨迹规划算法时,需要考虑机械臂的限制条件,如关节角度范围、运动速度等。
3.硬件连接与调试将控制器和传感器与机械臂相连,进行硬件连接。
通过调试软件和硬件的配合,实现对机械臂运动的控制。
在调试过程中需要对控制算法和轨迹规划算法进行调优,确保机械臂能够准确完成指定的运动。
四、系统测试与验证在实现机械臂控制系统后,需要进行系统测试与验证。
通过测试可以评估系统的性能,如运动的准确度和稳定性等。
验证测试是对系统的功能进行验证,确认系统是否满足设计要求。
同时,还可以针对系统进行性能优化,提升机械臂的运动速度和精度。
五、结论本文介绍了二自由度机械臂控制系统的设计与实现。
通过设计合理的机械结构、控制器、传感器和算法,可以实现对机械臂的精确控制。
二自由度机械臂matlab

二自由度机械臂matlab二自由度机械臂是一种常见的工业机器人,它由两个旋转关节组成,可以在水平和垂直方向上进行运动。
在工业自动化领域,二自由度机械臂被广泛应用于装配线上的零部件处理、焊接、涂装等工作。
在本文中,我们将探讨如何利用Matlab对二自由度机械臂进行建模和控制。
我们需要建立二自由度机械臂的数学模型。
通过分析机械臂的结构,可以得到其运动学和动力学方程。
运动学方程描述了机械臂末端的位置和姿态与关节角度之间的关系,而动力学方程则描述了机械臂关节的运动和扭矩之间的关系。
利用Matlab可以方便地求解这些方程,从而实现对机械臂运动的仿真和控制。
接下来,我们可以利用Matlab进行机械臂的控制设计。
控制设计的目标是使机械臂能够按照预先设定的轨迹进行运动,并实现精准的定位和操作。
常见的控制方法包括PID控制、模糊控制和神经网络控制等。
在Matlab中,可以通过编写控制算法来实现对机械臂的闭环控制,从而提高其运动的精度和稳定性。
除了控制设计,Matlab还可以用于机械臂的路径规划和优化。
路径规划是指在给定约束条件下,寻找机械臂末端的最佳运动轨迹,以实现高效的操作。
而优化算法可以帮助机械臂在复杂环境中选择最优的路径,避免碰撞和提高效率。
通过Matlab的强大计算能力,可以快速地求解路径规划和优化问题,为机械臂的运动提供有效的支持。
二自由度机械臂的建模和控制是一个复杂而又具有挑战性的问题。
利用Matlab作为工具,可以方便地对机械臂进行仿真、控制设计、路径规划和优化,从而提高机械臂的运动性能和工作效率。
未来随着人工智能和机器学习的发展,二自由度机械臂的应用将会更加广泛,Matlab将继续发挥重要的作用,推动机械臂技术的发展和应用。
机械臂控制系统设计与实现
机械臂控制系统设计与实现近年来,随着制造业的不断发展,机器人技术也得到了快速发展和广泛应用。
机械臂作为一种重要的机器人形式,其控制系统设计和实现同样具有重要意义。
本文将从机械臂控制系统的基本结构入手,探讨机械臂控制系统的设计与实现过程。
一、机械臂控制系统基本结构机械臂控制系统主要由硬件和软件两部分组成,其中硬件包括机械臂的机械结构和电气控制系统,软件则包括机械臂运动控制程序和人机交互界面等几个方面。
机械臂的机械结构是机械臂控制系统最基本的组成部分之一,其主要由手臂主体、关节、驱动器、传感器、执行器等部分构成。
手臂主体主要负责机械臂的承载和基础运动。
关节是连接相邻手臂的部件,其控制机械臂运动的方向以及角度大小。
驱动器则是用于驱动机械臂运动的电子部件,其可以根据控制信号改变输出的功率与速度。
传感器则是用于感应机械臂本身或外部环境的电子元器件,包括位置传感器、力传感器等。
执行器则是根据控制信号,将机械臂运动控制指令转换成机械执行动作的装置。
机械臂控制系统的电气控制部分,则主要由底层硬件电路、工业控制器和人机交互屏幕等组成。
底层硬件电路一般是机械臂各种电气元件的组成,包括电机、电容、电阻、开关等元件。
工业控制器主要负责机器人的自动化控制,是整个系统的“大脑”。
人机交互屏幕则是机械臂控制系统与操作人员之间的接口,通过其可以对机械臂执行动作进行控制,或获取机械臂的运动状态等信息。
机械臂控制系统的运动控制程序是通过工业控制器上的编程实现的,其可以控制机械臂实现各种精准运动轨迹,为机械臂的自动化控制打下坚实的基础。
此外,人机交互界面也是机械臂控制系统设计和实现中的重点之一,其需要通过易用性良好的图形界面,将复杂的机械臂运动算法简化成操作简单的指令,以降低机械臂操作的难度和工作复杂度。
二、机械臂控制系统的设计与实现1. 机械结构设计在机械臂控制系统的设计中,机械结构的设计是至关重要的。
其需要根据机械臂的工作环境和工作重载等因素进行统筹考虑,以确保机械臂在工作时能具备足够的可靠性和稳定性。
二自由度检修机械臂的研究的开题报告
二自由度检修机械臂的研究的开题报告一、选题背景与意义:近年来,随着工业机器人技术的不断进步和应用,各行各业的自动化生产和智能制造已经成为发展的趋势。
机械臂作为工业机器人的重要部件,具有运动自由度多、自主控制及精准度高等优点,成为各种工业自动化设备必不可少的组成部分。
而在机械臂的使用过程中,由于长时间使用或者其他因素导致的故障、损坏或者需要更换零部件等情况,都需要进行检修,因此研究检修机械臂的可行性和有效性,对于保证机械臂的稳定性和延长使用寿命具有重要意义。
二、选题目的及研究内容:本课题旨在研究二自由度检修机械臂的设计方案、机构构造和控制系统,探索机械臂在故障、损坏或更换零部件等情况下的检修可行性和效率,使机械臂的使用寿命得到延长,从而提高生产效率和降低生产成本。
具体的研究内容包括:1、对机械臂的机构结构进行分析,确定适合机械臂的检修方案和设计方案。
2、设计二自由度检修机械臂的机构结构,采用适当的材料进行设计,保证机械臂的强度和耐用性。
3、研究并开发出合适的控制系统,实现对机械臂的多自由度控制,从而使机械臂根据实际需要进行各种操作和动作。
4、开展机械臂的实验室测试和现场实践,进行机械臂性能评估、检修成本分析和检修效率评估。
三、研究方法:本课题的研究方法主要是基于理论和实验相结合的方法。
首先通过理论分析和模拟实验,确定机械臂的机构结构,确定合适的控制系统,并进行机械结构和控制系统的设计与开发。
然后在实验室和生产现场进行实际测试和评估,得到机械臂检修方案的可行性和有效性,从而实现机械臂检修的自主化和智能化。
四、预期目标与成果:本课题的预期目标和成果主要包括:1、设计出可靠、稳定、安全的二自由度检修机械臂,并通过实验室和现场测试验证其性能和效果。
2、实现机械臂的故障检修、零部件更换、机械结构维护等操作,提高机械臂的使用寿命和生产效率。
3、为机械臂的智能控制和自主检修提供技术支持和参考资料,为制造业的自动化生产和智能制造做出贡献。
二自由度机械臂的鲁棒轨迹跟踪控制及仿真
D( q ) ( 尊一y )+C( q , g ) ( q—Y )+G ( g ) = ( q , q , q , 口 ) P,
即
D( q ) Y+C ( q , q ) Y =r一 ( q , q , q , , 寸 , ) P一∞ 。
1 控制器 的设计
分 别 引入 变量 Y和 q ,并令 :
Y g , e + Te . g d — ye ,
g—q o
( 2 )
( 3 )
( 4 ) ( 5 )
其 中常数 >0,则 可推 出 :
y
取 =q , , P= ,有 : D( q ) i t , +C ( q , ) ,+G ‘ g ) = ( g , , q r ) P。
第2 7卷
第 3期
洛 阳 理工 学 院学 报 (自然 科 学 版 ) J o u na r l o f L u o y a n g I n s t i t u t e o f S c i e n c e a n d T e c h n o l o g y ( N a t u r a l S c i e n c e E d i t i o n )
( e ) , = 1+ ( ) ; 1=d i a g ( k p 1 1 ' k p 1 2 , …, k p 1 ) , K p 2= d i a g ( k p 2 l , 口 2 2 o  ̄ o , k p 2 n ) ; l=
v l n
)  ̄
… , ;
基 金 项 目 :河 南 省 教 育 厅 重 点 科 研 项 目( 1 6 B 4 2 3 0 0 3 ) .
第 3期
张
《基于张量积模型变换的多自由度机械臂控制器设计》范文
《基于张量积模型变换的多自由度机械臂控制器设计》篇一一、引言随着机器人技术的快速发展,多自由度机械臂作为机器人领域的重要一环,其控制器设计显得尤为重要。
本文旨在探讨基于张量积模型变换的多自由度机械臂控制器设计,以提高机械臂的运动精度和稳定性。
首先,我们将对相关领域的研究背景进行综述,然后介绍本文的研究目的和意义。
二、相关领域研究背景多自由度机械臂是一种具有多个关节和连杆的机器人系统,其运动轨迹和姿态控制对于实现复杂任务至关重要。
目前,机械臂控制器设计主要采用基于动力学模型、基于视觉反馈、基于学习等方法。
其中,基于张量积模型变换的方法在多自由度机械臂控制中具有较高的应用潜力。
张量积模型能够有效地描述机械臂的动态特性和运动学特性,为控制器设计提供了重要的理论依据。
三、张量积模型与机械臂控制本文采用张量积模型对多自由度机械臂进行建模和分析。
首先,我们将建立机械臂的张量积模型,包括关节空间和操作空间的动态模型。
然后,利用张量积模型的特性,对机械臂的运动轨迹进行优化和调整。
在此基础上,设计一种基于张量积模型变换的控制器,以实现机械臂的精确运动和稳定控制。
四、控制器设计1. 确定控制目标:本文旨在设计一种能够精确控制多自由度机械臂的控制器,使其在运动过程中具有较高的稳定性和精度。
2. 设计思路:基于张量积模型的特性,将机械臂的运动轨迹进行优化和调整,然后通过控制器实现精确的运动控制。
具体而言,我们采用张量积模型变换方法对机械臂的动态特性进行描述,通过分析模型的特性和规律,确定控制器的结构和参数。
3. 控制器实现:在控制器实现过程中,我们采用了现代控制理论中的一些关键技术,如PID控制、模糊控制等。
通过将这些技术与张量积模型相结合,实现了对机械臂的精确运动控制和稳定控制。
五、实验结果与分析为了验证本文所设计的控制器的有效性,我们进行了多组实验。
实验结果表明,基于张量积模型变换的控制器能够有效地提高多自由度机械臂的运动精度和稳定性。
机械臂控制系统的设计与实现

机械臂控制系统的设计与实现随着自动化技术的不断发展,机械臂成为了工业生产中不可或缺的重要设备。
机械臂具有高度的灵活性和精准性,能够完成复杂的工作任务,并且可以上下左右自由运动。
而机械臂控制系统是机械臂操作的基础,它可以为机械臂提供精准操作、灵活运动的保障。
本文将探讨机械臂控制系统的设计与实现。
一、机械臂的基本结构机械臂由底座、臂杆、关节和夹具等部分组成。
底座是机械臂的支撑点,可以使机械臂在水平面内进行360度的旋转。
臂杆是机械臂的主体部分,可以进行上下运动。
而关节是连接臂杆和夹具的部分,可以对机械臂进行各种姿态变换。
夹具则是机械臂的工作部分,可以根据不同任务而装配不同工具或夹具。
二、机械臂控制系统的原理机械臂控制系统是利用电气及计算机技术来控制机械臂的运动轨迹和姿态的系统。
机械臂控制系统的基本原理是将电脑内部的程序转化为具有实际控制能力的电路信号,通过电路控制机械臂的运动和姿态。
机械臂控制系统分为软件控制和硬件控制两大部分。
其中软件控制主要负责机械臂的运动规划和路径规划等任务,而硬件控制则是具体实现机械臂的运动和姿态调节的关键。
三、机械臂控制系统的设计要点机械臂控制系统的设计要点主要包括机械臂的运动规划、路径规划、姿态控制、运动控制和位置反馈等方面。
机械臂的运动规划和路径规划要根据具体任务需求进行优化,以实现精准和高效的操作。
同时,姿态控制也是设计要点之一,可以通过PID等算法进行调节,确保机械臂的稳定性和精度。
另外,机械臂的运动控制也是设计要点之一,可以采用PWM、DAC等控制模块进行精准控制。
而位置反馈则可以通过编码器等传感器进行实现,以确保机械臂位置的准确度和稳定性。
四、机械臂控制系统的实现方法机械臂控制系统的实现方法主要分为基于单片机和基于工控机两种。
其中基于单片机的实现方法相对简单,可以通过编写C语言代码实现机械臂的控制功能。
而基于工控机的实现方法则需要具备比较强的计算机硬件和软件基础,需要选取适合的工控机、操作系统和控制软件等。
二自由度机械臂matlab
二自由度机械臂matlab二自由度机械臂是一种常见的工业机器人,它通常由两个旋转关节组成,可以在水平平面内进行运动。
在工业自动化领域,二自由度机械臂被广泛应用于装配、焊接、搬运等任务中,其简单结构和灵活性使其成为生产线上的重要角色。
在工程设计中,使用Matlab对二自由度机械臂进行建模和控制是一种常见的方法。
Matlab是一种功能强大的数学建模软件,可以帮助工程师们快速准确地分析和设计机械系统。
通过Matlab,工程师可以轻松地对机械臂的运动学和动力学特性进行建模,并设计出高效稳定的控制算法。
建立二自由度机械臂的数学模型是Matlab中的关键步骤。
首先,工程师需要确定机械臂的几何参数,包括关节长度、关节角度范围等。
然后,利用正运动学和逆运动学方程,工程师可以计算出机械臂末端的位置和姿态,从而建立起机械臂的运动学模型。
在建立好运动学模型之后,工程师需要进一步分析机械臂的动力学特性。
通过使用Matlab的仿真工具,工程师可以模拟机械臂在不同工况下的运动轨迹和力学特性,帮助他们优化机械臂的设计参数和控制算法。
控制算法是二自由度机械臂设计中的另一个关键点。
在Matlab中,工程师可以编写各种控制算法,如经典的PID控制、模糊控制、神经网络控制等,来实现对机械臂的精准控制。
通过不断调整和优化控制算法,工程师可以使机械臂在各种工况下实现高效稳定的运动。
总的来说,利用Matlab对二自由度机械臂进行建模和控制是一种高效可靠的方法。
Matlab提供了丰富的工具和函数,帮助工程师们快速准确地分析和设计机械系统。
通过不断优化和改进,工程师们可以设计出性能优越的二自由度机械臂,为工业生产带来更高的效率和质量。
多自由度机械臂设计及其应用

多自由度机械臂设计及其应用多自由度机械臂是指具有多个自由度的机械臂,可以在不同的空间方向上进行运动和操作。
在现代工业生产中,多自由度机械臂已经成为了不可或缺的工艺装备。
本文将深入探讨多自由度机械臂的设计和应用。
一、多自由度机械臂的基本结构多自由度机械臂由以下几个基本部分组成:基座、臂杆、关节、执行器和传感器等。
1. 基座:机械臂的基座是机械臂整体的支撑结构,固定于地面或其他结构体上。
2. 臂杆:臂杆是机械臂的主要结构部分,由多个相互连接的臂段组成,通过关节连接。
3. 关节:关节是机械臂中的运动部件,在机械臂的运动中发挥重要作用。
一般分为旋转关节和直线关节两大类。
4. 执行器:指机械臂用来控制物体的工具部分,可根据不同的应用需要而设计成不同型式的工具头。
5. 传感器:传感器是用来检测机械臂运动状态、控制机械臂运动方向、判断机械臂工作状态的传感器。
二、多自由度机械臂的设计多自由度机械臂的设计涉及到多学科的知识,如机械设计、电子设计、控制工程、材料学等。
设计合理的机械臂需要满足以下几个条件:1. 稳定性:机械臂应具有良好的稳定性,可以在高速运动时不失稳。
2. 载荷能力:机械臂应具有良好的承载能力,可以承受不同重量的物体。
3. 灵活性:机械臂应具有良好的灵活性,可以在不同的空间方向上进行运动。
4. 精度:机械臂应具有良好的定位精度和姿态精度,以保证对物体的正确把握。
5. 控制能力:机械臂应具有良好的控制能力,可以通过电子控制系统实现与物体的精确定位。
三、多自由度机械臂的应用多自由度机械臂在现代工业生产中应用广泛,可以用于各种物体的搬运、装配、焊接、喷涂、打磨、拆卸和测试等工作。
以下是多自由度机械臂的具体应用:1. 自动化生产线:多自由度机械臂可以在生产线上完成自动化操作,如搬运和装配。
2. 车间操作:多自由度机械臂可以完成车间内的一些操作,如焊接和打磨。
3. 医疗保健:多自由度机械臂可以在医疗方面发挥重要作用,如手术和康复等。
机械臂控制系统的设计与实现
机械臂控制系统的设计与实现机械臂是一种能够适应各种情况的机电装置,由于其优异的灵活性、高效性和精准性,被广泛应用于工业生产和物流行业中。
而机械臂的自主控制成为了实现自动化生产流程的重要手段之一。
本文将从机械臂控制系统的设计和实现两个方面展开探讨。
机械臂控制系统的设计机械臂控制系统是由硬件和软件两个部分组成。
硬件部分主要包括机械臂的驱动器、传感器和控制器。
机械臂的驱动器包括电机、减速器和传动装置,控制器则是负责控制机械臂运动的主控板。
传感器则用于获取机械臂的位置和运动状态信息,从而实现精准控制。
而软件部分则是由控制程序和驱动程序组成,控制程序通常采用C或C++等高级语言进行编写,而驱动程序则是将控制程序的指令翻译为机械臂能够识别的语言。
机械臂控制系统的设计需要先明确所需实现的功能。
不同的应用场景会有不同的需求,例如螺丝拧紧机械臂需要具备拧紧力度的控制能力,而用于物流搬运的机械臂需要具备精准的目标定位和位置控制能力。
因此在设计时需要对机械臂和其控制系统的功能需求进行明确和分析,从而确定所需硬件和软件组件。
其次,需要针对不同的需求选择合适的硬件和软件组件。
硬件部分需要根据机械臂的参数确定驱动器类型和传感器类型,并选择适合的控制器。
软件部分则需要根据机械臂参数和控制系统的功能需求,选择合适的编程语言和相应的编程工具。
例如,在编写控制程序时可以采用ROS(机器人操作系统)等现有的机器人操作平台,自主开发控制程序也是一种选择。
最后,机械臂控制系统的设计需要进行系统集成和优化。
在系统集成时需要考虑机械臂控制系统与其他相关设备的联动,例如与传送带、分拣机器人等设备的协调与交互。
在系统优化方面则需要针对具体应用场景不断调整和优化控制算法,以提升机械臂的精度和速度。
机械臂控制系统的实现实现机械臂控制系统需要进行软件编程和硬件调试两个过程。
在编写控制程序时需要先了解机械臂的控制方式和硬件结构,然后根据机械臂的运动学模型和控制算法进行控制程序的开发。
两自由度机械臂动力学模型的建模与控制
2020(Sum. No 207)2020年第03期(总第207期)信息通信INFORMATION & COMMUNICATIONS两自由度机械臂动力学模型的建模与控制王磊,陈辰生,张文文(同济大学中德学院,上海202001)摘要:机器人系统建模在布局评估、合理性研究、动画展示以及离线编程等方面有越来越广的应用。
文章对两个自由度 机械臂基于拉格朗日动力学方程,进行建模。
通过建立的模型,分析了重力对两自由度机械臂的影响以及在重力作用下不在稳定位置的机械臂的运动轨迹。
基于机械臂的数学模型,基于Simulink 仿真环境,建立机械臂的仿真模型。
采用逆 动力学方法对机械臂进行控制,观察其对机械臂的控制效果⑴。
通过仿真建模,可以了解机械臂动力学模型以及机械臂动态模型的控制问题。
关键词:动力学模型;数学模型推导;机器人建模;重力分析;逆动力学控制中图分类号:TP241 文献标识码:A 文章编号:1673-1131(2020 )03-0040-03The simulation and control of two ・degree-of freedom robot armWang Lei, Chen Chensheng, Zhang Wenwen(Sino German College of Tongji University, Shanghai 201804)Abstract: The simulation of robot systems is becoming very popular, it can be used for layout evaluation, feasibility studies, presentations with animation and off-line programming 121. In this paper, two degrees of freedom manipulators are modeled based on Lagrange^ dynamic equation. Through the established model, the influence of g ravity on the two-degree-of-freedom manip ulator and the trajectory of the manipulator that is not in a stable position under the action of gravity are analyzed. Based on the mathematical model of the robotic arm and the Simulink simulation environment, a simulation model of the robotic arm is es tablished. The inverse dynamics method was used to control the manipulator, and the control effect on the manipulator was observed. Through simulation modeling, you can understand the dynamics model of the robotic arm and the control problems of the dynamic model of t he robotic arm.Key words: dynamic model; mathematical model derivation; robot modeling; gravity analysis; inverse dynamic control0引言机器人学是一门特殊的工程科学,其中包括机器人设计、建模、控制以及使用。
二自由度机械臂控制系统的设计与实现
,并通过PD或PID控制器将实际系统和模型系统有机的联系起来。本论文将其应用到机器人控制中来,不但很好的解决了因无法获取精确模型所带来的误差问题,而且此方法由于是基于PD和PID控制的,算法简单,速度快,克服了传统控制方法难于实现的弱点,更为关键的是它有出色的干扰抑制能力和鲁棒性。
控制领域要比传统的电磁电机性能优越得多。目前,旋转型超声波电机,尤其是环形行波型超声波电机,在工业、办公、过程自动化等领域的伺服系统
中作为直接驱动执行器得到广泛的关注。
本论文主要研究并设计了基于超声波电机驱动二自由度机械臂实现快速定位的控制系统,给出了具体技术方案;分析了孤极信号反馈在实现超声波
电机速度稳定控制时的补偿作用,并进一步分析了孤极信号反馈对超声波电机的负载与转速关系的补偿作用。
,尤其是环形行波型超声波电机,在工业、办公、过程自动化等领域的伺服系统中作为直接驱动执行器得到广泛的关注。
本论文主要研究了基于超声波电机的二自由度机械臂定位和速度控制系统,核心芯片采用MSP430F147单片机,这种单片机性价比比较高,功能比较完善,有利于超声波电机的产业化;按照系统需求进行了软件设计,给出了实验结果,并针对实验中出现的非线性问题给出了一种简单可行的解决方法。系统运行稳定,实验结果较为理想,为超声波电机的产业化提供了一定的经验。
全桥驱动逆变电路的优缺点。
设计了基于超声波电机的二自由度机械臂的快速定位驱动控制电路。首先,提出了本次设计的设计思想及目的;其次,介绍了本设计的控制器硬件
具体技术以及调速原理,本次设计控制器CPU芯片采用MSP430F147单片机,这种单片机性价比较高,利于超声波电机的产业化;最后,介绍了电机控制器
挖掘机机械臂多自由度运动控制系统设计

挖掘机机械臂多自由度运动控制系统设计目录一、内容概览 (2)1.1 研究背景与意义 (2)1.2 国内外研究现状 (3)1.3 论文结构安排 (4)二、挖掘机机械臂运动学基础 (5)三、多自由度运动控制系统设计原理 (7)3.1 控制系统基本构成 (8)3.2 控制策略选择 (9)3.3 传感器与执行器设计 (11)四、挖掘机机械臂控制系统硬件设计 (12)4.1 控制器选择 (14)4.2 伺服电机与驱动器 (15)4.3 传感器设计与选型 (16)4.4 通信接口设计 (17)五、挖掘机机械臂控制系统软件设计 (18)5.1 软件架构设计 (20)5.2 控制算法实现 (21)5.3 人机交互界面设计 (22)六、系统集成与调试 (23)6.1 系统集成方案 (25)6.2 调试过程与方法 (26)6.3 系统性能测试与评估 (27)七、结论与展望 (28)7.1 研究成果总结 (29)7.2 存在问题与不足 (30)7.3 后续研究方向展望 (31)一、内容概览本文主要探讨了挖掘机机械臂多自由度运动控制系统的设计与实现。
介绍了挖掘机机械臂的工作原理和作业任务;其次,分析了多自由度运动控制系统的基本理论和技术;接着,详细阐述了系统硬件和软件的设计方案;通过实验验证了系统的正确性和有效性。
1.1 研究背景与意义随着科技的不断发展,挖掘机在建筑、矿山、道路等工程领域的应用越来越广泛。
挖掘机机械臂作为挖掘机的重要组成部分,其性能和功能对于提高工程效率和质量具有重要意义。
传统的挖掘机机械臂运动控制系统往往存在一定的局限性,如响应速度慢、精度不高、稳定性差等问题。
研究一种高效、稳定、精确的挖掘机机械臂多自由度运动控制系统具有重要的理论和实际意义。
多自由度运动控制系统是指能够实现挖掘机机械臂多个自由度(如旋转、平移、伸缩等)的运动控制。
这种控制系统可以使挖掘机机械臂在各种工况下实现高效、精确的运动,从而提高挖掘机的作业效率和质量。
多自由度机械臂的设计以及运动仿真
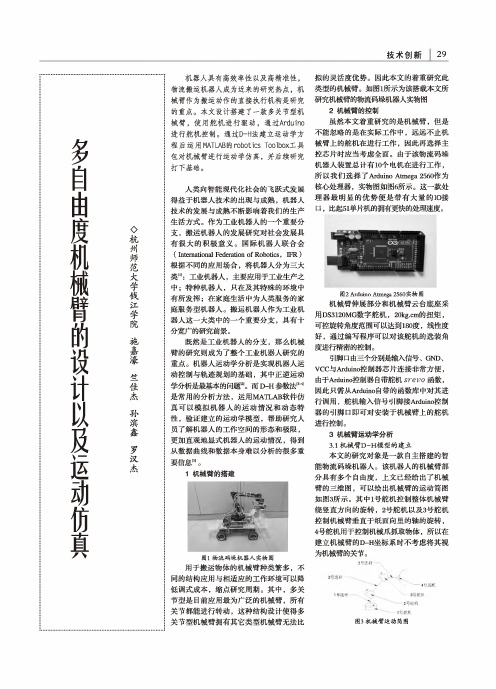
技术创新 29◊杭州师范大学钱江学院施嘉濠竺佳杰 孙滨鑫罗汉杰多自由度机械臂的设计以及运动仿真机器人具有高效率性以及高精准性, 物流搬运机器人成为近来的研究热点,机械臂作为搬运动作的直接执行机构是研究 的重点。
本文设计搭建了一款多关节型机械臂,使用舵机进行驱动,通过Arduino进行舵机控制。
通过D-H 法建立运动学方 程后运用MATLAB 的robotics Toolbox 工具包对机械臂进行运动学仿真,并后续研究 打下基础。
人类向智能现代化社会的飞跃式发展 得益于机器人技术的出现与成熟,机器人 技术的发展与成熟不断影响着我们的生产生活方式。
作为工业机器人的一个重要分 支,搬运机器人的发展研究对社会发展具有很大的积极意义。
国际机器人联合会 (International Federation of Robotics , IFR )根据不同的应用场合,将机器人分为三大 类叫工业机器人,主要应用于工业生产之 中;特种机器人,只在及其特殊的环境中 有所发挥;在家庭生活中为人类服务的家庭服务型机器人。
搬运机器人作为工业机器人这一大类中的一个重要分支,具有十 分宽广的研究前景。
既然是工业机器人的分支,那么机械臂的研究则成为了整个工业机器人研究的 重点。
机器人运动学分析是实现机器人运 动控制与轨迹规划的基础,其中正逆运动学分析是最基本的问题鷺而D-H 参数法X是常用的分析方法,运用MATLAB 软件仿 真可以模拟机器人的运动情况和动态特 性,验证建立的运动学模型,帮助研究人员了解机器人的工作空间的形态和极限,更加直观地显式机器人的运动情况,得到 从数据曲线和数据本身难以分析的很多重 要信息曲□1机械臂的搭建图1物流码垛机器人实物图用于搬运物体的机械臂种类繁多,不 同的结构应用与相适应的工作环境可以降低调式成本,缩点研究周期。
其中,多关节型是目前应用最为广泛的机械臂,所有关节都能进行转动,这种结构设计使得多关节型机械臂拥有其它类型机械臂无法比 拟的灵活度优势。
自由度机械臂设计说明
自由度机械臂设计说明简介自由度机械臂是一种多关节的机械装置,具有灵活性和精准性,并广泛应用于工业生产线、医疗手术和科研实验等领域。
本文将介绍自由度机械臂的设计原理、结构以及应用场景。
设计原理自由度机械臂的设计原理基于刚体运动学和力学原理。
其关节可由电机或液压缸驱动,通过控制系统对其运动进行精确控制。
主要设计原理如下:1.机械结构设计:自由度机械臂的结构可分为一臂、二臂和多臂式,根据不同的应用需求选用合适的结构形式。
每个关节可通过旋转、平移或伸缩来实现机械臂的运动。
2.动力学分析:对机械臂的动力学进行分析,包括关节的力矩和角速度计算。
通过合理的设计和控制算法,使机械臂能够稳定地完成所需的动作。
3.传感器与控制系统:为了实现准确的控制,机械臂通常配备传感器,如编码器和力传感器,用于实时获取机械臂的位置和力信息。
控制系统则根据传感器反馈的数据进行动作规划和控制算法的调整。
结构设计自由度机械臂的结构设计主要涉及材料选择、关节设计和运动范围的确定。
1.材料选择:根据机械臂的使用环境和承载要求,选择合适的材料以保证机械臂的强度和稳定性。
常见的材料有铝合金、碳纤维复合材料等。
2.关节设计:关节是机械臂的运动部分,其设计应考虑关节的转动自由度、驱动方式以及承载能力。
关节的材料和结构应具备足够的刚度和耐磨性,以保证机械臂的运动精度和寿命。
3.运动范围的确定:根据应用需求确定机械臂的运动范围,包括关节的旋转范围和机械臂的工作空间。
在设计过程中,需要考虑机械臂的尺寸、关节的限位和避免碰撞等因素。
应用场景自由度机械臂在许多领域都有广泛的应用,以下是几个常见的应用场景:1.工业生产线:自由度机械臂可用于物料搬运、装配和焊接等工业生产任务,提高生产效率和产品质量。
2.医疗手术:自由度机械臂可用于精确的手术操作,减少手术风险和提高手术成功率。
3.科研实验:自由度机械臂可用于科研实验中的精密操作,如材料测试和样品处理等。
4.无人驾驶:自由度机械臂可用于无人驾驶车辆中的感知和控制,实现自主驾驶和智能交互。
二自由度机械臂设计
二自由度机械臂设计
设计二自由度机械臂是一项重要的工程任务,旨在实现机器人在特定工
作空间内灵活运动,并完成特定的操作任务。
该机械臂具有两个独立的自由度,允许其在平面内进行旋转和伸缩。
设计二自由度机械臂需要确定适合特定工作环境的结构和尺寸。
考虑到
工作空间的大小、作业要求和材料限制,选择合适的臂长和关节角度范围。
这可以通过详细分析所需工作任务的运动范围来实现。
选择合适的驱动系统和传感器是设计过程中的关键步骤。
根据工作任务
的性质,可以采用直流电机、步进电机或伺服电机作为驱动装置。
同时,安
装传感器来实时监测机械臂的位置和力量,并通过反馈机制来控制臂的运动。
设计控制系统是确保机械臂正常运行的关键因素。
通过集成控制器和计
算机编程,确保机械臂能够准确执行特定的运动轨迹并处理各种输入信号。
这要求开发适当的算法和编写有效的控制代码,以实现机械臂的精确控制。
设计时还需考虑机械臂的结构强度和稳定性。
使用合适的材料和结构设计,确保机械臂在工作过程中能够承受惯性力和外部冲击,并保持稳定的操
作状态。
机械臂的安全性也是设计过程中的重要考虑因素。
采取必要的安全措施,如限位开关和防护罩等,以确保机械臂在运行过程中不会损坏设备或造成人
身伤害。
设计二自由度机械臂需要综合考虑工作环境、运动需求、驱动系统、控
制系统、结构强度和安全性等因素。
通过合理的设计和完善的控制,机械臂
能够在工业生产、装配线和仓储等领域发挥重要作用,提高生产效率和安全性。
机械臂运动控制系统设计与实现的开题报告

机械臂运动控制系统设计与实现的开题报告一、选题的背景和意义机械臂是一种能够接近、抓取、搬运物品的机械设备,广泛应用于生产制造、物流仓储、农业等领域。
机械臂的运动控制是机械臂能否达到所需位置、姿态的关键。
与传统的运动控制技术相比,机械臂的运动控制技术要求更高,包括精度、稳定性等方面。
因此,研究机械臂运动控制系统的设计与实现,对于提高机械臂的运动效率、降低生产成本、提高生产质量具有重要的意义。
二、研究内容和计划研究内容:1.了解机械臂的基本结构、工作原理和运动学原理。
2.分析机械臂的运动学模型和动力学模型,建立机械臂的运动学方程和动力学方程。
3.设计机械臂的运动控制系统,包括硬件设计和软件设计。
4.实现机械臂运动控制系统,并测试其性能。
研究计划:第一阶段:进行文献调研,了解机械臂的基本结构、工作原理和运动学原理。
研究机械臂的运动学模型和动力学模型,建立机械臂的运动学方程和动力学方程。
第二阶段:设计机械臂运动控制系统的硬件和软件,包括定位控制、运动控制、电机控制等方面。
对机械臂的标准化接口、开放式系统结构等关键技术进行研究。
第三阶段:实现机械臂运动控制系统,并进行测试和数据分析。
对机械臂运动控制系统的精度、稳定性、响应速度等性能进行评估。
三、研究方法和技术路线研究方法:1.文献调研法:对相关的文献进行调研和研究,了解机械臂的基本结构、工作原理和运动学原理,为后续设计和实现机械臂运动控制系统奠定基础。
2.系统论方法:通过建立机械臂的运动学模型、动力学模型等,对机械臂的运动控制进行系统化研究和分析。
3.实验研究法:对机械臂运动控制系统进行实验,测试其运动精度、稳定性、响应速度等性能。
技术路线:1.机械臂的运动学和动力学建模。
2.机械臂运动控制系统的设计和实现。
包括硬件设计和软件设计,如电机控制模块、运动控制模块、定位控制模块等。
3.机械臂运动控制系统的测试和数据分析。
四、预期成果1.机械臂的运动学和动力学模型,建立机械臂的运动学方程和动力学方程。
两自由度机械臂动力学模型的建模与控制
两自由度机械臂动力学模型的建模与控制
两自由度机械臂是指由两个旋转关节连接的机械臂,可以在二维平面内进行运动。
建立两自由度机械臂的动力学模型,可以用于控制器设计和路径规划。
1. 机械臂的动力学建模:
a. 首先,需要确定机械臂的连杆长度、质量以及旋转关节的惯性参数等。
这些参数可以通过实验或者手动测量获得。
b. 建立机械臂的正运动学方程,即通过旋转关节的角度计算连杆末端的位置和姿态。
c. 利用拉格朗日方程,可以得到机械臂的动力学方程。
动力学方程描述了系统的运动方程和力矩平衡关系。
2. 控制器设计:
a. 常用的控制方法有位置控制、速度控制和力控制等。
选择适合机械臂的控制方法,根据控制要求设计闭环控制系统。
b. 设计适当的控制算法,如PID控制器、模糊控制器或者神经网络控制器等,以实现期望的控制性能。
c. 在控制器设计过程中,需要对系统进行参数辨识和系统模型验证,以确保控制器的稳定性和鲁棒性。
3. 控制系统实现与调试:
a. 根据控制器的设计结果,实现完整的控制系统,包括硬件的搭建、传感器
的连接和信号处理等。
b. 进行控制系统的调试和参数调整,通过实验验证控制器的性能,并进一步优化控制算法和参数。
总结:建立两自由度机械臂的动力学模型是实现精确控制和路径规划的前提。
通过合适的控制器设计和系统实现,可以使机械臂实现所需的任务和运动轨迹。
(完整版)倒立摆实验报告
机械综合设计与创新实验(实验项目一)二自由度平面机械臂三级倒立摆班级:姓名:学号:指导教师:时间:综述倒立摆装置是机器人技术、控制理论、计算机控制等多个领域、多种技术的有结合,被公认为自动控制理论中的典型实验设备,也是控制理论教学和科研中不可多得的典型物理模型。
倒立摆的典型性在于:作为实验装置,它本身具有成本低廉、结构简单、便于模拟、形象直观的特点;作为被控对象,它是一个高阶次、不稳定、多变量、非线性、强耦合的复杂被控系统,可以有效地反映出控制中的许多问题;作为检测模型,该系统的特点与机器人、飞行器、起重机稳钩装置等的控制有很大的相似性[1]。
倒立摆系统深刻揭示了自然界一种基本规律,即一个自然不稳定的被控对象,运用控制手段可使之具有良好的稳定性。
通过对倒立摆系统的研究,不仅可以解决控制中的理论问题,还能将控制理论所涉及的三个基础学科,即力学、数学和电学(含计算机)有机的结合起来,在倒立摆系统中进行综合应用。
在多种控制理论与方法的研究和应用中,特别是在工程实践中,也存在一种可行性的试验问题,将其理论和方法得到有效的经验,倒立摆为此提供一个从控制理论通往实践的桥梁[2]。
因此对倒立摆的研究具有重要的工程背景和实际意义。
从驱动方式上看,倒立摆模型大致可分为直线倒立摆模型、旋转倒立摆模型和平面倒立摆模型。
对于每种模型,从摆杆的级数上又可细分为一级倒立摆、二级倒立摆和多级倒立摆[3]。
目前,国内针对倒立摆的研究主要集中在运用倒立摆系统进行控制方法的研究与验证,特别是针对利用倒立摆系统进行针对于非线性系统的控制方法及理论的研究。
而倒立摆系统与工程实践的结合主要体现在欠驱动机构控制方法的验证之中。
此外,倒立摆作为一个典型的非线性动力系统,也被用于研究各类非线性动力学问题。
在倒立摆系统中成功运用的控制方法主要有线性控制方法,预测控制方法及智能控制方法三大类。
其中,线性控制方法包括PID控制、状态反馈控和LQR 控制等;预测控制方法包括预测控制、分阶段起摆、变结构控制和自适应神经模糊推理系统等,也有文献将这些控制方法归类为非线性控制方法;智能控制方法主要包括神经网络控制、模糊控制、遗传算法、拟人智能控制、云模型控制和泛逻辑控制法等。
桌面机械臂毕业设计范本
桌面机械臂毕业设计范本题目:基于ROS的桌面机械臂控制系统设计与实现摘要:本文设计并实现了一款基于ROS的桌面机械臂控制系统,系统包括硬件设计和软件编程两个部分。
硬件设计部分主要包括机械臂结构设计、传感器选型和接口设计等内容,软件编程部分主要包括ROS环境搭建、机械臂控制程序设计和GUI界面设计等。
最终实现了一款具有多种控制模式、可视化界面和语音控制功能的桌面机械臂控制系统。
关键词:ROS、桌面机械臂、控制系统、传感器、GUI界面、语音控制一、引言随着机器人技术的不断发展,机器人在工业、医疗、军事等领域得到了广泛应用。
其中,桌面机械臂是一种小型、灵活、易于操作的机器人,广泛应用于教育、科研、家庭等领域。
本文基于ROS系统,设计并实现了一款具有多种控制模式、可视化界面和语音控制功能的桌面机械臂控制系统,为桌面机械臂的应用提供了一种方便、高效的解决方案。
二、系统设计2.1 硬件设计2.1.1 机械臂结构设计机械臂结构设计采用了4自由度的SCARA结构,能够完成多种运动轨迹,满足多种应用需求。
机械臂采用铝合金材料制作,结构稳定、重量轻、易于加工。
机械臂末端配备了夹爪,可用于抓取物品。
2.1.2 传感器选型和接口设计为了实现机械臂的高精度控制,本系统采用了多种传感器,包括光电编码器、陀螺仪和加速度计等。
传感器通过SPI和I2C接口与控制板连接,提供了高精度的数据反馈。
2.2 软件设计2.2.1 ROS环境搭建ROS是一款广泛应用于机器人领域的开源软件平台,具有强大的通信、控制和感知能力。
本系统采用了ROS Melodic版本,通过ROS中的话题和服务机制实现了机械臂的控制和数据传输。
2.2.2 机械臂控制程序设计机械臂控制程序采用了C++语言编写,通过ROS的MoveIt库实现了机械臂的逆向运动学和轨迹规划。
程序支持多种控制模式,包括手动控制、自动控制和远程控制等。
同时,程序还支持语音控制功能,通过语音识别技术实现了对机械臂的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
20080601
摘要
摘要
在20世纪30至U40年代,奈奎斯特、伯德、维纳等人的著作为自动控制理论的初步形 成奠定了基础;二次大战以后,经过众多学者的努力,形成了较为完整的自动控制系统 设计的频率法理论和根轨迹法理论。这种建立在频率法和根轨迹法基础上的理论,通常 被称为经典控制理论。随着现代科学技术的迅速发展,控制对象、控制器以及控制任务 和目的的闩益复杂化,以数学建模和数值计算为基础的经典控制理论面临许多新问题, 如:计算复杂性的急剧增加;建模的困难越来越大;多输入和输入信息多样化;非线性 系统的控制等等,所以诞生了以状念空间法为基础的现代控制理论。较之经典控制理论, 现代控制理论的使用范围更广泛,它既可以适合单变量的、线性的、定常的、连续的的 系统,也可以适合多变量的、非线性的、时变的、离散的系统。随着科学技术的突飞猛 进,对工业过程控制的要求越来越高,不仅要求控制的精确性,更注重控制的鲁棒性、 实时性、容错性以及对控制参数的自适应和学习能力。另外,需要控制的工业过程R趋 复杂、工业过程严重的非线性和不确定性,使许多系统无法用数学模型精确描述,现代 控制方法面临空前的挑战。为解决以上现代控制系统存在的问题,“大系统理论”、“复杂 系统”及“智能控制”是目前控制理论较为热门的研究方向。
With the rapid development of modem scientific technology,control object,controller and control
tasks&goal are becoming more and more complicated.The classical control theory based on precise modeling and numerical calculation is facing many new problems such as the rapid increase of computing
more on the robustness,real-time performance,faulty·tolerance capacity,self-adaptaБайду номын сангаасility of the control
parameter than the precision of contr01.Also,with the controlled industrial process being more and more
that is multiple variable,nonlinear,time-varying,discrete.With the rapid development of scientific
technology,the requirement of industrial process control is becoming higher and higher.It focuses much
本文通过研究模糊控制理论的发展和应用,对L匕PID算法和其他模糊控制算法,阐述 自组织模糊控制方法的优势。本文使用MATLAB仿真自组织模糊控制算法对二自由度机械 臂的控制,说明白组织模糊控制算法的可行性和有效性。为了验证本文所提出的自组织 模糊控制器的可行性,本人研究制作了一套二自由度机械手臂控制系统以评估模糊自组 织控制的可行性。实验结果证实,自组织模糊控制器在减少机械臂关节空间轨迹追踪误 差上,比传统模糊控制器有较佳的控制性能。 关键词:机械臂,自动控制,PID控制,模糊逻辑,自组织模糊控制器。
method was set up. Compared to classical control theory,modem control theory has been used more widely.
It can not only adapt to the system that is single variable,linear,steady and continuous but also to the system
complexity,the more and more difficulty of precise modeling,multi-input&diversification of input information and nonlinear system contr01.Therefore the modem control theory based on state space
Abstract
The Design and Realization of 2-DOF Robot Manipulator control system
During the period of 1930s to 1940s,Automatic Control Theory preliminarily formed based on Nyquist,
Bode and Wiener's works.The relatively complete theory of frequency method and root locus method for
the design of automatic control system was set up through the efforts of numerous scholars after world war II.
近年来,得益于计算机科学技术和智能信息处理的高速发展,智能控制理论与智能 化系统发展十分迅速。其中代表性的理论有专家系统、模糊逻辑控制、神经网络控制、 遗传算法、混沌控制等。模糊逻辑控制作为智能控制的一种重要方法,近年来发展很快。 模糊控制实质上是一种非线性控制,它采用模糊语言描述系统,既可以描述应用系统的 定量模型也可以描述其定性模型,所以模糊逻辑可适用于任意复杂的对象控制。