送料机的PLC控制
PLC运料小车的程序控制

运料小车的程序控制一、实验目的1.熟习时间控制和行程控制的原则。
2.掌握准时器指令的使用方法。
3.掌握次序控制继电器指令(SCR)的编程方法。
二、实验器械计算机一台;S7-200PLC—台;PC/PPI编程电缆一根;模拟输入开关一套;JD-PLC3运料小车实验模板一块;导线若干。
三、实验步骤1.按I/O接线图进行接线。
2.输入运料小车的控制程序,编译下载后,调试该程序。
3.按运料小车的次序功能图调试程序。
调试时,用模拟开关模拟输入信号,特别要注意模拟行程开关SQ1和SQ2状态的变化。
注意察看输入、输出状态指示灯(或输入信号、输出负载)的状态变化能否与次序功能图一致。
便于察看,也可点击“程序状态”按钮进行调试。
(1)、次序功能图(2)、I/O端子接线图YV1YV2KM1KM2FR1©1L丨Q0.0Q0.2(3)、梯形图c:crSQlT H-rH:)荊号I mti n ria[s^r0?<7皆开妾1YV1□o.u KMT37宓|J O=.T)网縮5L臭一蚩匹B疮莹―(琢]岡箱5丨篇二占审盘龄IPF岭1£02・SCRRS7丨本轴計1$ko.o i i/>I J用号[i«t注莊1KMl[002苗行RS0I荷和到GE,世字砖到樂三弓C啞序氐|1SQ3工巧J1辻毬\5Q2]101討7裡开关2i 第二乩腹序脚£3?―aCFf)HS ID|蚩乍CF碎耳舒庶忻嗚SOI8LHRW ii申茶刑匚・吕刊⑷屋时再EMC.0W2IN TCH 1D0-円IQOirtRW12[I5S J&K序聘T30$14—11—GCRlJ圏13丨龍三Eh稈序段结束——SCAL)阴U|萼四汇R程厅揑制祥梵15C4“seaRTS15|1车站T ISMttO畑2 I I() T3 E岡踣16左症到为<再序痔到第一孔邂序段3。
16(smE)仔車后.遊回耳垢状戒—se2sc.i—||C H)|地址汪釋|||]'l停止描铤TITLE=程序说明Network1结次序控制程序的设计方法和调试方法。
自动送料装车系统PLC控制设计说明
一、控制要求1.1 控制对象介绍自动送料装车系统是用于物料输送的流水线设备,主要是用于煤粉、细砂等材料的运输。
自动送料装车系统一般是由给料器、传送带、小车等单体设备组合来完成特定的过程。
这类系统的控制需要动作稳定,具备连续可靠工作的能力。
通过三台电机和三个传送带、料斗、小车等的配合,才能稳定、有效率地进行自动送料装车过程。
如下图所示:1.2 控制原理自动送料装车系统是通过电机和限位开关来控制的。
称重开关S2控制汽车开来或开走。
三台电机控制三个传送带。
进料开关K1控制控制进料与否。
检测开关S1控制料斗中物料的空满。
另外,在S2处增设两个七段数码管,用来统计每日的装车数。
装车数的统计采用脉冲计数的方法进行。
脉冲计数方法是当装料车装满时S2断开后,开始定时放送脉冲;当S2闭合时停止发送脉冲。
一个脉冲的宽度即为一辆汽车。
用两个数码管计数,所计的数即为装车数。
当S2接通时,红灯L1亮,绿灯L2灭,传送电动机M3运行,传送电动机M2延迟M3电动机2S运行,送料电动机M1延迟M2电动机2S运行,料斗K2延迟M2电动机2S打开出料。
当料满后(S2断开后),料斗K2关闭,电动机M1延时2S后关断,M2在M1停后2S后停止,M3在M2停止后2S后停止,L2灯亮,L1灯灭,此时汽车可以开走。
1.3 自动送料装车系统的启停过程示意图该图中从上到下是启动顺序,从下到上是停止顺序。
1.4 控制要求初始状态:红灯L1灭,绿灯L2亮,表示允许汽车开进装料,料斗K2,电动机M1,M2,M3皆为OFF。
当汽车到来时(S2接通表示),L1亮,L2灭,M3运行,电动机M2在M3通2S后运行,M1在M2通2S后运行,K2在M1通2S后打开出料。
当物料满后(用S2断开表示),料斗K2关闭,电动机M1延时2S后关断,M2在M1停2S后停止,M3在M2停2S后停止,L2亮,L1灭,表示汽车可以开走。
设计要求:当料不满(S1为OFF,灯灭),料斗开关K2关闭(OFF),灯灭,不出料,进料开关K1打开(K1为ON)进料,否则不进料。
案例7 送料小车的PLC控制.

案例七送料小车的PLC控制一、学习目的1.对送料小车往返控制的了解及认识2.学习限位开关、金属传感器的应用。
3.学习PLC控制减速电机正反转。
4.培养解决问题的能力二、设备及器件●配备FX3U-32M型PLC的实验装置一套●SC-09电缆1根●电脑1台●GX Developer编程软件一套●小车运动控制模块一套三、实验原理系统设有启动、停止按钮各一个,模拟限位开关SQ0、SQ1、SQ2共三个。
如图9-1所示。
SQ0(A地) SQ1(B地) SQ2(C地)图9-1 送料小车示意图送料小车往返控制要求:当按下启动按钮后,启动送料小车。
小车从原点A地(SQ0)的位置停留5s进行装料,由A地(SQ0)位置送料到B地(SQ1)位置后,即刻卸料,空车返回到A地(SQ0)位置停留5s进行装料。
当小车由A地(SQ0)送料到C地(SQ2)位置,途中经过B地(SQ1)不停止,继续前进,当到达C地(SQ2)位置,同样即刻卸料,空车返回A地(SQ0)位置停留5s进行装料;以此往复循环。
当按下停止按钮,小车停止循环。
四、I/O 分配表表9-1 送料小车I/O 分配表输入口 说明输出口 说明 X0 左限位 Y0 KA1 X1 传感器B1 Y1 KA2 X2 传感器B2 X3 启动 X4 停止 X5复位五、I/O 接线图图9-2 送料小车I/O 接线图注意事项:(1)先将PLC 的电源线插进PLC 正面的电源孔中,再将另一端插到220V 电源插板。
(2)将电源开关拨到关状态,严格按图9-2所示接线,注意24V 电源的正负不可短接,电路不要短路,否则会损坏PLC 触点。
六、梯形图SQ0 SQ1 SQ2停止 启动 复位FX3U图9-3 送料小车梯形图。
plc控制小车自动送料
PLC控制送料小车的设计一.自动送料小车概述自动送料小车系统是用于物料输送的流水线设备,主要是用于煤粉、细砂等材料的运输。
自动送料小车系统一般是由给料器、传送带、小车等单体设备组合来完成特定的过程。
送料小车控制系统采用了PLC控制。
此送料小车电气控制系统设计具有手动和自动两种工作方式。
在程序设计上采用了模块化的设计方法。
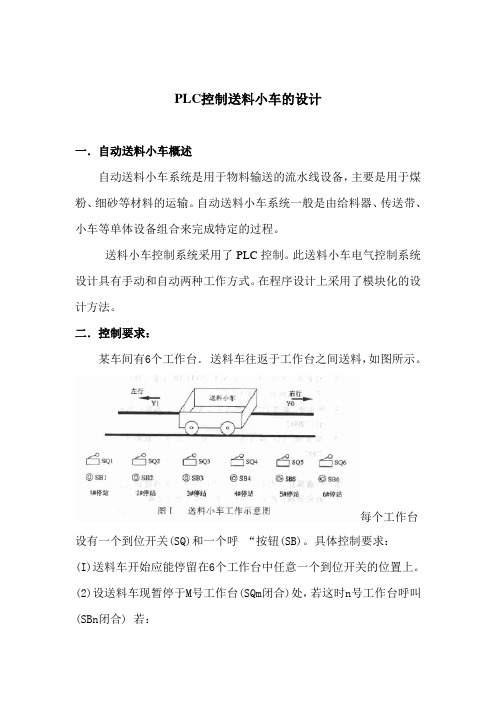
二.控制要求:某车间有6个工作台.送料车往返于工作台之间送料,如图所示。
每个工作台设有一个到位开关(SQ)和一个呼“按钮(SB)。
具体控制要求:(I)送料车开始应能停留在6个工作台中任意一个到位开关的位置上。
(2)设送料车现暂停于M号工作台(SQm闭合)处,若这时n号工作台呼叫(SBn闭合) 若:①m>n,送料车左行,直至SQn动作,到位停车,即送料车停车位置SQ 的编号大于呼叫按钮SB的编号时,送料车往左运行至呼叫位置后停止;②m<n,送料车右行.直至SQn动作,到位停车,即进料车所停位置SQ 的编号小于呼叫按钮SB前编号时,送料车往右运行至呼叫位置后停止;④ m=n,送料车原位不动,即送料车所停位置SQ的编号与呼叫按钮SB 的编号相同时,送科车不动。
三.PLC选型根据控制要求,系统的输入量有:启、停按钮信号,1号位-6 号位的限位开关SQl—SQ6信号,1号位-6号位的呼叫开关SB1~SB6信号:系统的输出信号有:前进、后退控制电机接触器驱动信号,电机运行的声光信号。
共需实际输人点数l7个,输出点数4个,本文选用日本三菱公司的FXON-40MR产品,其输入点数为24,输出点数为I6点。
小车行驶控制系统PLC的I/O资源配置表如表l所示:系统I/O资源配置表(2)外围设备在外围设备方面,采用RS232通信或RS485通信方式,与上位机连接,外部输入设备有光电开关,接近开关,按钮等。
外部输出设备有接触器,电磁阀,指示灯等。
输入/输出点分配如图1所示。
三菱图1 PLC输入/输出点分配图四.控制程序设计本程序设计的关键是处理好呼叫按钮和到位开关的位置关系,为此我们采用了将每个位置的行程开关与每个位置的按钮记录到数据寄存器中去,如将送料小车当前位置送到数据寄存器DO中,将呼叫工作台号送数据寄存器Dl中,然后通过比较DO与Dl中的数据,决定送料小车运行方向和达到的目标位置。
冲床自动送料机的PLC控制与设计
摘要:介绍了冲床自动送料机的设计和PLC控制,分析了机构的工作原理和PLC编程方法。
关键词:冲床;自动送料;PLC控制一、冲床自动送料机的技术状态本文介绍的冲床自动送料机是一种用于冷挤压套圈类零件的送料机器,是冲床进行技术改造的理想附机。
该送料机克服了国内外有关冲床送料机的不足。
如日本的RF20SD—0R11机械手送料装置与冲床做成一体,从横向(侧面)送料,结构复杂,装配、制造、维修困难,价格昂贵,又不适合于我国冲床的纵向送料的要求。
RF20SD—0R11的结构由冲床上的曲轴输出轴,通过花键轴伸缩,球头节部件联接机械手齿轮,由伞齿轮、圆柱齿轮、齿条、凸轮、拨叉、丝杆等一系列传动件使机械手的夹爪作伸缩、升降、夹紧、松开等与冲床节拍相同的动作来完成送料,另设一套独立驱动可移式输送机,通过隔料机构将工件输送至预定位置,这样一套机构的配置仅局限于日本设备,不能应用于国产冲床。
国内有的送料机构由冲床工作台通过连杆弹簧驱动滑块在滑道上水平滑动,将斜道上下来的料,通过隔料机构推到模具中心,并联动打板将冲好的料拨掉,往复运动的一整套机构比较简单,无输送机构,联动可靠,制造容易。
但机械手不能将料提升、夹紧,料道倾斜放置靠料自重滑下,如规格重量变动,则料道上工件下滑速度不一致,易产生叠料,推料机构没有将料夹紧,定位不正,废品率较高,使用也不安全。
结合国产冲床工作特点,采用机械手与输送机构配合为主要装置,再配合采用自动卸料安全保护,设计了具有较大应用价值和推广意义的自动送料机。
二、结构设计该送料机主要配备于3150kN冲床,也可配备于1600kN或1250kN等冲床。
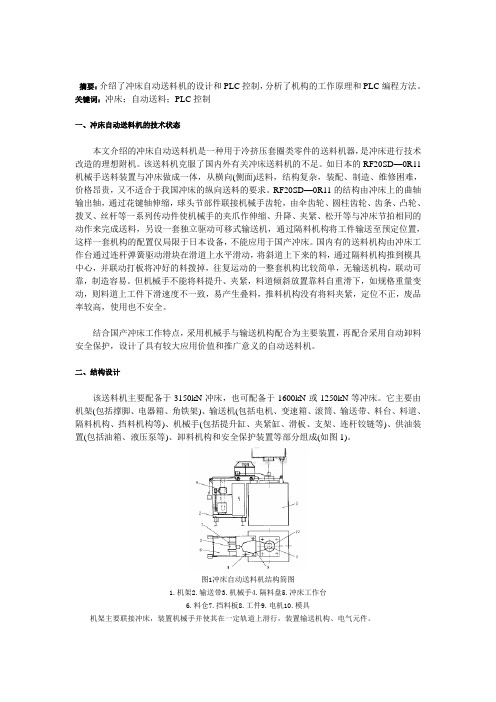
它主要由机架(包括撑脚、电器箱、角铁架)、输送机(包括电机、变速箱、滚筒、输送带、料台、料道、隔料机构、挡料机构等)、机械手(包括提升缸、夹紧缸、滑板、支架、连杆铰链等)、供油装置(包括油箱、液压泵等)、卸料机构和安全保护装置等部分组成(如图1)。
图1冲床自动送料机结构简图1.机架2.输送带3.机械手4.隔料盘5.冲床工作台6.料仓7.挡料板8.工件9.电机10.模具机架主要联接冲床,装置机械手并使其在一定轨道上滑行,装置输送机构、电气元件。
冲床自动送料机的PLC控制

凹模的结构如图4 所示 :
镶拼式凹模 的使用 , 可 以有效 的提高不规则冲裁件的质量和冲裁 效率 , 尤其是提高了存在尖角较多的冲裁件 凹模的使用寿命 。在不规 则零件 冲裁 中镶拼式 凹模的使用寿命 是整体式 凹模 的使用寿命的数十 倍 ,尤其 当整体式 凹模热处理不当 ,在尖角处存在残余应力时 ,组合 式凹模 的使用 寿命是整体式 凹模使用寿命 的百倍 。如果镶拼式凹模结 合面加工精度较 高,凹模套经过锻造热处理得 当的话 ,凹模的使用寿 命可达百万件以上 ,可大幅度降低冲裁加工成本 ,提高产品竞争力 。 1 、 下模座 2 、垫板 3 、凹模套 9 、凹模镶块
景。
罅
2 结构 设计
2 . 1 用可用于 冲孑 L 、落料 、切边 、弯 曲 、浅拉伸和成形等工序 ,广泛应用于国防、航空 、汽车 、拖拉机 、 电机 、电器 、 仪表 、医疗器械 、日 用五金等行业中。 工作原理 :使用机械旋转运 动 , 通过连杆机构传动力 ,到主轴上 使主轴形成 向下运动从 而形成冲力, 使工件在模具 中产生规定的变形 而
蟹4 冲 凹模缩I I I 参 考 文献
[ 1 ] 杨玉英 、崔令江 《实用冲压工艺及模具设计手册 》 机械工业 出版社
2 0 0 4
凹模 由凹模镶块与凹模套组成。因为凹模是冲压模中的主要工作 零件 ,在冲压过程中,它不但承受冲击载荷 , 而且在工作刃 口以及工 作表面 ,由于冲击会产生强烈 的应力集中。因此对材料的要求具有较
达 到 加工 的 。
1 . 机架2 . 输送带3 . 机械手4 . 隔料盘5 . 冲床工作 台 6 . 料仓7 . 挡料板8 . 工件9 . 电
机1 n 模具 圈 1 冲床 自动送料机 结构简曝
运料小车plc控制的应用原理
运料小车PLC控制的应用原理1. 概述本文档将介绍运料小车PLC(可编程逻辑控制器)控制的应用原理。
运料小车是一种用于运输物料的机械设备,通过PLC控制,能够实现自动化的运输和搬运功能。
本文将重点介绍PLC控制系统的硬件组成和工作原理,并提供一个示例程序说明PLC控制运料小车的具体实现方法。
2. PLC控制系统硬件组成PLC控制系统通常由以下几个主要组成部分组成:•PLC主机:负责接收输入信号、执行控制逻辑并输出控制信号的核心设备。
•输入/输出模块:用于连接传感器、执行器等外部设备与PLC主机之间的接口模块,将外部信号输入到PLC主机,并将PLC主机输出的控制信号传送给外部设备。
•电源模块:为PLC主机和其他模块提供电力供应。
•编程端口:用于编程和调试PLC控制程序的接口。
3. PLC控制系统工作原理PLC控制系统的工作原理如下:1.输入信号采集:PLC控制系统通过输入模块连接传感器等外部设备,可以获取物料位置、速度、传感器状态等输入信号。
2.控制逻辑执行:基于输入信号,PLC主机中的控制逻辑程序会根据预设的算法和规则进行判断和计算,并产生相应的输出控制信号。
3.输出信号控制:PLC控制系统通过输出模块连接执行器等外部设备,将PLC主机产生的控制信号传送到相关设备,如运动控制器、电动机驱动器等。
这些设备根据信号进行动作,并完成物料运输、搬运等操作。
4. PLC控制运料小车示例程序下面是一个示例程序,演示了如何使用PLC控制运料小车的运输过程。
1. 初始化:- 启动电源- 等待输入信号2. 判断当前状态:- 如果传感器信号为料仓有物料,则执行步骤3- 如果传感器信号为料仓无物料,则执行步骤43. 运输物料:- 控制运料小车启动并向指定位置运动- 到达目标位置后,停止运动- 等待输入信号4. 等待物料进料:- 等待输入信号- 如果传感器信号为料仓有物料,则执行步骤3- 如果传感器信号为料仓无物料,则循环执行步骤45. 关闭系统:- 停止运料小车的运动- 断开电源供应5. 总结本文介绍了运料小车PLC控制的应用原理。
PLC控制定量给料机
PLC控制定量给料机使用说明书承德承申自动化计量仪器有限责任公司本套系统适用于定量给料机,固体流量计,皮带秤。
采用了德国西门子S7-200系列PLC,具有运行稳定,精度高,扩展能力强的优点。
采用西门子大屏幕触摸屏,使的操作画面更加清晰直观易于操作。
数据输入全部采用屏幕软键盘,用户更加方便操作。
本系统可完全替代原装申克系列仪表应用的场合,其部分性能已超越原装仪表且价格低廉,扩展性能强。
以下部分是整个系统的操作解释,用户务必连续阅读。
首先是系统上电后的主画面:上电后触摸屏有一个自检过程过几十秒后与PLC连接成功,出现主画面。
在主画面中显示了两台给料机的工作画面。
如果此时有报警则在画面的右上角出现报警提示,用手点击报警提示,即可看到具体的报警信息。
主画面介绍:画面分为左右两台给料机,左边为一号给料机,右边为二号给料机。
我们以一号给料机为例进行介绍。
“#1启动”键用于启动给料机。
“#1停车”键用于停止给料机。
“ON/OFF”用于表示当前给料机的运行状态是处于启动状态或者停止状态下。
“G-MODE/V-MODE”用于表示当前给料机的运行模式是处于称量状态或者容积状态下。
“设定流量”表示当前给料机的设定值,用手按“设定流量”后面的数字即可出现一幅由数字和部分字母构成的屏幕键盘,在键盘上按相应的数字键和确认键即可完成对“设定流量”的修改。
(B07中的设定值为“触摸屏”时有效)“实际流量”表示当前给料机的实际流量值。
“皮带负荷”表示当前给料机的称量端负荷值。
“皮带速度”表示当前给料机的皮带速度值。
“累计流量”表示当前给料机的累计流量值。
主画面介绍完了,下面介绍功能画面:“功能键”位于主画面的左上角,点击“功能键”即可出现“功能画面”如下图:主画面介绍:“系统功能画面”分仍为左右两台给料机,左边为一号给料机,右边为二号给料机。
我们仍以一号给料机为例进行介绍。
1、标定功能:根据实际应用参数对程序进行必要的设置,以便精确的应用在实际现场中。
PLC自动送料小车控制系统

7.6 PLC的基本应用7.6.2 PLC应用系统设计自动送料小车控制系统送料小车控制要求如图7.43(b)所示,I/O地址分配及功能如表7.12所示,主电路如图7.43(a)所示,控制电路如图7.43(c)所示。
在限位开关SQ1处装料,5s后装料结束,开始右行。
碰到SQ2后停下来卸料,5s 后左行。
碰到SQ1后又停下来装料。
这样不停地循环工作。
直到按下停止按钮SB3。
按钮SB1和SB2分别用来起动小车右行和左行。
在电动机正反转控制梯形图的基础上,设计出的小车控制梯形图如图7.44所示。
为了使小车自动停止,将I0.4和I0.3的常闭触点分别串入Q0.0和Q0.1的线圈电路。
为了使小车自动起动,将控制装、卸料延时的定时器T40和T41的常开触点分别与手动起动右行和左行的I0.1和I0.0的常开触点并联。
并用两个限位开关的常开触点分别接通装料、卸料电磁阀和相应的定时器。
设小车左行,碰到限位开关SQ1(I0.3)时,它的常闭触点使Q0.1断开,小车停止左行。
它的常开触点使Q0.2和T40线圈接通,开始装料和延时。
5s后T40的常开触点闭合,启动小车右行。
SQ1(I0.3)断开后停止装料。
右行和卸料过程的分析与上面的基本相同。
按下停止按钮SB3(I0.2)后小车将停止运动。
表7.12 自动送料小车控制系统PLC I/O地址分配功能名称动作器件I / O地址右行启动SB1 I0.0左行启动SB2 I0.1停止SB3 I0.2左限位SQ1 I0.3右限位SQ2 I0.4 电机过载保护FR1 I0.5右行KM1 Q0.0左行KM2 Q0.1装料YV1 Q0.2卸料YV2 Q0.3图7.43 自动送料小车控制电路。
PLC控制冲床自动送料机的设计方案

PLC控制冲床自动送料机的设计方案一、冲床自动送料机的技术状态本文介绍的冲床自动送料机是一种用于冷挤压套圈类零件的送料机器,是冲床进行技术改造的理想附机。
该送料机克服了国内外有关冲床送料机的不足。
如日本的RF20SD—0R11机械手送料装置与冲床做成一体,从横向(侧面)送料,结构复杂,装配、制造、维修困难,价格昂贵,又不适合于我国冲床的纵向送料的要求。
RF20SD—0R11的结构由冲床上的曲轴输出轴,通过花键轴伸缩,球头节部件联接机械手齿轮,由伞齿轮、圆柱齿轮、齿条、凸轮、拨叉、丝杆等一系列传动件使机械手的夹爪作伸缩、升降、夹紧、松开等与冲床节拍相同的动作来完成送料,另设一套独立驱动可移式输送机,通过隔料机构将工件输送至预定位置,这样一套机构的配置仅局限于日本设备,不能应用于国产冲床。
国内有的送料机构由冲床工作台通过连杆弹簧驱动滑块在滑道上水平滑动,将斜道上下来的料,通过隔料机构推到模具中心,并联动打板将冲好的料拨掉,往复运动的一整套机构比较简单,无输送机构,联动可靠,制造容易。
但机械手不能将料提升、夹紧,料道倾斜放置靠料自重滑下,如规格重量变动,则料道上工件下滑速度不一致,易产生叠料,推料机构没有将料夹紧,定位不正,废品率较高,使用也不安全。
结合国产冲床工作特点,采用机械手与输送机构配合为主要装置,再配合采用自动卸料安全保护,设计了具有较大应用价值和推广意义的自动送料机。
二、结构设计该送料机主要配备于3150kN冲床,也可配备于1600kN或1250kN 等冲床。
它主要由机架(包括撑脚、电器箱、角铁架)、输送机(包括电机、变速箱、滚筒、输送带、料台、料道、隔料机构、挡料机构等)、机械手(包括提升缸、夹紧缸、滑板、支架、连杆铰链等)、供油装置(包括油箱、液压泵等)、卸料机构和安全保护装置等部分组成(如图1)。
图1 冲床自动送料机结构简图1.机架2.输送带3.机械手4.隔料盘5.冲床工作台6.料仓7.挡料板8.工件9.电机10.模具机架主要联接冲床,装置机械手并使其在一定轨道上滑行,装置输送机构、电气元件。
(完整word版)自动送料小车的PLC控制指导书

实验三自动送料小车的PLC控制实验一、实验目的1.熟习常用的 PLC指令;2.掌握次序控制程序的设计方法。
二、实验设施1.安装了 CX-Programmer编程软件的计算机 1台;2.自动送料小车实验箱。
三、实验内容1.剖析自动送料装车控制任务,掌握被控系统动作要求;2.设计 PLC的地点分派表温次序功能图;3.依据次序功能图设计出详细的梯形图程序,并进行调试。
四、实验原理自动送料装车控制在自动化工厂或生产线中是不行缺的重要环节。
从原料的输送,至各道工序加工点,再到成品的输出。
因为受场所、实行难度、成本及灵活性等人为的限制,很难采纳单调长距离传递,而是采纳多段式传递系统。
下列图是一个 3段的皮带运输机的传动系统。
图 1 自动送料装车控制要求:1.按下启动开关 ST,则挨次启动,前级传递带落伍于后级传递带开始启动,使得原料不在后级传递带上聚积,每级间延时30秒开始启动,次序为第三级——第二级——第一级(第四级暂不用);第一级传递带开启同时翻开电磁阀H21;2.S3处于 on时表示车已装满,马上开走,从头装车,H20灯亮;3.按下停止开关STP,则电磁阀立刻封闭,四级传递带由前去后挨次停止,每级间仍延时30S,次序为第一级——第二级——第三级,目的是清空传递带上的物料;4.S0、S1、S2合上分别表示此级发生故障,应使得前级的传递带立刻停止工作,尔后级的传递带挨次延时 30秒停止工作。
依据控制要求设计的 I/O 地点分派表和输入输出电气接线图以下:表1 地点分派表输入信号输出信号开始开关 ST0.00H0(一级传递带运转)100.00停止开关 STP0.01H4(二级传递带运转)100.01故障开关 S00.02H10(三级传递带运转)100.02故障开关 S10.03H20(车装满)100.03故障开关 S20.04H21(漏斗电磁阀)100.04车装满开关 S30.05图 2 输入输出电气接线图采纳次序控制程序设计法,第一做出切合控制要求的次序功能图参照以下:图 3 次序功能图五、实验步骤1.设计 I/O 分派表 ;2.依据送料小车功能要求设计次序功能图;3.依据设计的次序功能图采纳通用指令编写梯形图程序;4.用欧姆龙 CP1H 系列 PLC 模块调试程序:先将PLC 和计算机连结,再下载梯形图程序,运转调试,并记录实验过程中看到的现象。
基于plc控制的自动送料机
毕业设计(论文)题目:自动送料机控制系统设计学生姓名徐栋平指导教师高峰二级学院机电工程学院专业电气工程及其自动化班级 M09电气工程及其自动化(专转本)学号 0921410029 提交日期 2010年 5 月 10 日答辩日期 2010年 5月15日目录摘要........................................... 错误!未定义书签。
Abstract ........................................ 错误!未定义书签。
1绪论.. (1)1。
1 题目来源及课题意义 (1)1.2 自动送料机控制系统的工作原理及技术要求 (1)2 硬件系统的介绍 (2)2。
1TWDLCAA400DRF简介 (2)2。
2。
1、TWIDO系列PLC (2)2.1。
2、TWDLCAA400DRF的主要使用特点: (2)2.1。
3、TWDLCAA40DRF的硬件接线: (3)2。
2Twido系列PLC指令简介 (3)2。
2。
1、装载指令 (3)2。
2。
2、赋值指令(ST/STN/R/S) (4)2。
2。
3、逻辑与指令(AND/ANDN/ANDR/ANDF) (5)2.2.4、逻辑或指令(OR/ORN/ORR/ORF) (5)2。
2.5、异或指令(XOR/XORN/XORR/XORF) (6)2。
2。
6、取反指令(N) (7)2.2.7、定时器功能模块(%TMi) (7)2。
3Twido编程软件介绍 (9)2.3。
1、TwidoSoft 软件的启动和退出 (9)2.3。
2、文件操作 (10)2.3。
3、梯形图编程 (10)3 系统实现目标及控制的实现 (12)3.1控制系统的介绍 (12)3.2控制原理及要求 (12)3。
3自动送料装车系统的启停过程示意图 (13)3.4 I/O分配表,PLC外部接线图,梯形图 (14)3。
4。
1、I/O分配表 (14)3。
4.2、PLC外部接线图 (15)3.4。
基于PLC控制器的五轴送料机械手控制系统设计

基于 PLC控制器的五轴送料机械手控制系统设计摘要:机械手在工业生产中被广泛应用,随着工业的不断发展,人们对于机械手控制系统有着更高的要求,自动化控制大势所趋,基于PCL控制器实现自动化控制,能够促进机械手工作的顺利进行,从而提升工作效率。
本文将基于PCL控制器的五轴送料机械手控制系统进行分析,然后进行控制系统的设计,从而提升系统的科学性,能够使其在运行中更加高效安全。
关键词:PCL;五轴送料;控制系统;机械手一、PCL控制器的相关概述(一)PCL控制器的概念PCL控制器是将计算机软件技术、总动控制技术融为一体的工业化控制器。
[1]随着工业的不断发展,PCL控制器被更多的应用在工业化技术中,从而完成更加复杂的工业化工程,从而促进我国工业化迅速发展。
(二)PCL控制器的功能PCL控制器在控制系统中发挥着非常重要的作用,从而促进系统的顺利运行。
下面来简单分析一下。
1.控制功能。
对于PCL控制器,控制功能是基础也是核心所在。
PCL控制器对采集的信号进行综合分析和处理,从而对过程中的各执行机构的运动进行控制。
如PCL控制器通过高速计数和位置控制等相关传感器和模块采集到的信号,综合分析处理后,对相应的执行机构进行控制;过程控制是通过采集到的模拟量来控制一些非电量的参数,比如温度、湿度、流速等参数,转换为电信号,通过程序分析处理后,对相应的执行机构调节和控制。
2.数据处理。
在控制过程中,系统会产生相应的数据,PCL控制器能够对读取到的数据,很好地进行数据转换、分析和运算等工作,比如机器人控制系统可以对读取信号产生大量的数据进行运算和处理,从而得出最佳结果,控制机械手等执行结构工作。
3.实时监控。
PCL控制器具有人工智能的优点,能够通过智能技术来对系统进行实时监控,可以监测系统的运行情况,当遇到问题时,能够及时的发出警示,并自动进行处理、记录和保存,为故障分析提供依据和指导。
4.通信和联网。
PCL控制器可以与计算机联网,进行系统远程自动化控制。
PLC控制冲床自动送料机的设计方案.doc
PLC控制冲床自动送料机的设计方案一、冲床自动送料机的技术状态本文介绍的冲床自动送料机是一种用于冷挤压套圈类零件的送料机器,是冲床进行技术改造的理想附机。
该送料机克服了国内外有关冲床送料机的不足。
如日本的RF20SD—0R11机械手送料装置与冲床做成一体,从横向(侧面)送料,结构复杂,装配、制造、维修困难,价格昂贵,又不适合于我国冲床的纵向送料的要求。
RF20SD—0R11的结构由冲床上的曲轴输出轴,通过花键轴伸缩,球头节部件联接机械手齿轮,由伞齿轮、圆柱齿轮、齿条、凸轮、拨叉、丝杆等一系列传动件使机械手的夹爪作伸缩、升降、夹紧、松开等与冲床节拍相同的动作来完成送料,另设一套独立驱动可移式输送机,通过隔料机构将工件输送至预定位置,这样一套机构的配置仅局限于日本设备,不能应用于国产冲床。
国内有的送料机构由冲床工作台通过连杆弹簧驱动滑块在滑道上水平滑动,将斜道上下来的料,通过隔料机构推到模具中心,并联动打板将冲好的料拨掉,往复运动的一整套机构比较简单,无输送机构,联动可靠,制造容易。
但机械手不能将料提升、夹紧,料道倾斜放置靠料自重滑下,如规格重量变动,则料道上工件下滑速度不一致,易产生叠料,推料机构没有将料夹紧,定位不正,废品率较高,使用也不安全。
结合国产冲床工作特点,采用机械手与输送机构配合为主要装置,再配合采用自动卸料安全保护,设计了具有较大应用价值和推广意义的自动送料机。
二、结构设计该送料机主要配备于3150kN冲床,也可配备于1600kN或1250kN 等冲床。
它主要由机架(包括撑脚、电器箱、角铁架)、输送机(包括电机、变速箱、滚筒、输送带、料台、料道、隔料机构、挡料机构等)、机械手(包括提升缸、夹紧缸、滑板、支架、连杆铰链等)、供油装置(包括油箱、液压泵等)、卸料机构和安全保护装置等部分组成(如图1)。
图1 冲床自动送料机结构简图1.机架2.输送带3.机械手4.隔料盘5.冲床工作台6.料仓7.挡料板8.工件9.电机10.模具机架主要联接冲床,装置机械手并使其在一定轨道上滑行,装置输送机构、电气元件。
PLC在NC伺服送料机应用
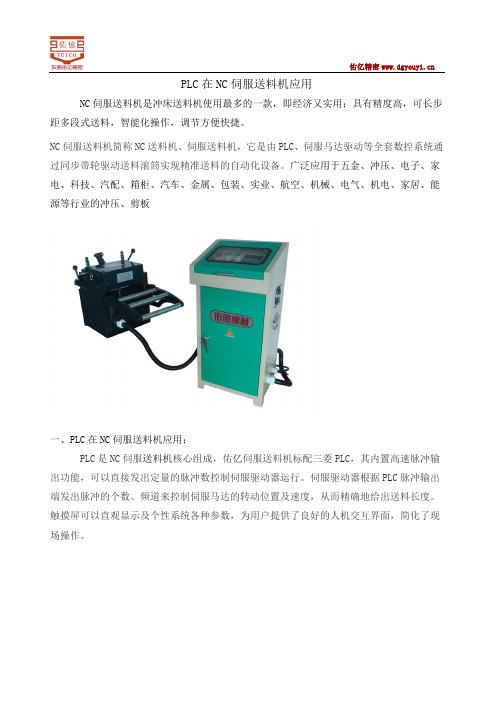
PLC在NC伺服送料机应用NC伺服送料机是冲床送料机使用最多的一款,即经济又实用:具有精度高,可长步距多段式送料,智能化操作,调节方便快捷。
NC伺服送料机简称NC送料机、伺服送料机,它是由PLC、伺服马达驱动等全套数控系统通过同步带轮驱动送料滚筒实现精准送料的自动化设备。
广泛应用于五金、冲压、电子、家电、科技、汽配、箱柜、汽车、金属、包装、实业、航空、机械、电气、机电、家居、能源等行业的冲压、剪板一、PLC在NC伺服送料机应用:PLC是NC伺服送料机核心组成,佑亿伺服送料机标配三菱PLC,其内置高速脉冲输出功能,可以直接发出定量的脉冲数控制伺服驱动器运行。
伺服驱动器根据PLC脉冲输出端发出脉冲的个数、频道来控制伺服马达的转动位置及速度,从而精确地给出送料长度。
触摸屏可以直观显示及个性系统各种参数,为用户提供了良好的人机交互界面,简化了现场操作。
当处于手动工作方式时,在伺服正进信号的上升沿,执行ACC(频率加减速控制)指令,设定模式控制数据,实现CW(顺时针)方向的转动,使伺服马达正转。
在伺服正进信号的下降沿,执行INI(动作模式控制)指令,停止脉冲输出。
伺服马达反转情况可以类推。
当处于自动工作方式时,PLC将预先设定的脉冲发送到伺服驱动装置,此时执行PLS2(定位)指令。
二、参数设定工作原理送料机PLC根据设定的送料长度,在收到送料信号后,输出信号到伺服放大器,伺服放大器控制电机运转,电机运转的度数由编码器反馈回伺服放大器,二者配合完成设定的送料长度传送。
当冲床到达下死点时,送料机PLC接收到放松信号,此时PLC输出1个信号驱动电磁阀动作,此电磁阀控制送料机气缸,气缸活塞动作,使送料机构上滚轮松开。
从以上可以看出PLC在NC伺服送料机应用中起到非常重要的部份。
三、NC滚轮送料机特点:1、高精度的送料:针对高科技产业来临,采用日本原装进口伺服,以电脑闭路式回授控制,使精度确保在±0.02mm以内。
PLC控制振动送料机
PLC控制振动送料机摘要随着科学技术的发展,送料设备在不但的更新和完善,振动振动送料机是生产中的一个关键环节,送料机的作用是将生产中粉状、粒状物料以一定速度输送到后续设备,以实现整个生产自动化。
本课题着重叙述液压系统的设计和计算,主要内容有:根据相关要求对各阀类零件的选用;集成块的各零件设计及其装配设计;液压站的装配设计;以及液压缸等部件的设计与计算。
本课题采用CAD设计,以及液压系统集成化设计,缩短开发周期、调试周期,易于修改。
在设计的过程中根据实际情况取得相关数据,参考有关资料,吸取前人的设计经验,并根据客观实际和掌握的现有知识加以改进,最终完成对电动液压经轴装卸车的设计与计算。
关键词:经轴装卸车;液压系统;设计计算JingZhou loading and unloading car systemAbstractWith the development of science and technology,the feeding machine also made huge improvemeng .Now ,vibration dosing system is a key part among the recipe –production syatem.The function of the vibration dosing system is,feed raw materials to its downstream machines according the recipe ,to realize the vibration production.The main content of the subject included: according to relevant requirements of each valve parts choose; the main content is: integrates one all parts design and assemble designing; the assembly of the hydraulic pressure station is designed; And the design and calculation of such parts as the hydraulic cylinder, etc. This subject design with CAD skill, include the hydraulic pressure system is designed integrated, shortens development period, debugs cycle, because CAD is easy to revise. Obtain relevant data according to the actual conditions during the process of designing, consult relevant materials, draw forefathers' design experience, and improve according to the objective reality and existing knowledge grasped, I finish design and calculation of the machine which split the nut with hydraulic pressure finally.Keywords:JingZhou loading and unloading car;Hydraulic pressure; Design and calculation.目录前言 (1)第1章液压系统设计 (3)1.1 PLC控制的振动送料机液压系统 (3)1.1.1 振动下料机的基本结构 (3)1.1.2 振动下料机的液压系统图及其工作原理 (4)1.1.3技术特点 (5)1.1.4技术参数(见表1-1) (6)第2章液压缸的设计 (7)2.1 液压缸主要尺寸的确定 (7)2.1.1 夹紧缸内径D和活塞杆直径d的确定 (7)2.1.2 液压缸壁厚和外径计算 (9)2.1.3 液压缸的选用及工作行程的确定 (10)2.2 各工作阶段液压缸所需的流量 (11)2.2.1 夹紧缸所需的流量 (11)2.2.2 送进缸所需的流量 (11)第3章常用液压元件 (12)3.1 液压泵 (12)3.1.1 确定液压泵的流量、压力和选择泵的规格 (12)3.2 电动机 (13)3.2.1 确定电动机的功率和选用 (13)3.3 液压阀 (13)3.3.1 液压阀的选择 (13)第4章辅助元件 (16)4.1 管道 (16)4.1.1 确定管道尺寸 (16)4.2 管道和管接头的选择 (16)4.2.1 管道的选用 (16)4.2.2 管接头的选用 (17)4.3 滤油器 (17)4.3.1 滤油器的选用 (17)4.4 空气过滤器 (17)4.4.1空气过滤器的选择 (17)4.5 液位计 (18)4.5.1 液位计的选择 (18)第5章集成块装置的设计 (20)5.1概述及特点 (20)5.1.1集成块的一般结构 (20)5.1.2集成块的特点 (21)5.2集成块设计 (21)第6章液压站设计 (22)6.1液压油箱的设计 (22)6.1.1液压油箱有效容积的确定 (22)6.1.2液压油箱外形尺寸的确定.... 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电感式传感器内部的振荡器在传感器
工作表面产生一个交变磁场。当金属
物体接近这一磁场并达到感应距离时,
在金属物体内产生涡流,从而导致振
荡衰减,以至停振。振荡器振荡及停
振的变化被后级放大电路处理并转换
成开关信号,触发驱动控制器件,从
而达到非接触式的检测目的。电感式
传感器只能检测金属物体。电感传感
电感传感器
项目二 送料机的PLC控制
任务1 YL-235A送料机构部件控制的编程与调试
1
任务1 YL-235A送料机构部件控制的编程与调试
知识目标:
1、了解亚龙YL-235A型光机电一体化设备送料机构的 组成。 2、了解亚龙YL-235A型光机电一体化设备送料机构工 件计数控制的动作过程。 3、掌握PLC内部计数器的功能及使用方法。 4、了解F118加/减计数指令的使用方法。 5、进一步熟悉比较指令的应用。
插入动画m02-01-001动画
4
知识链接1:亚龙YL-235A型光机电一体化实训装置介绍
1、 YL-235A型光机电气一体化训练装置是浙江亚龙公司开发
的一套包含PLC控制技术、传感器、变频器、变频调速、气压传 动、电机驱动、机械传动等技术的综合应用培训装置。
插入动画 全过程动 画(5中有)
5
知识链接1:亚龙YL-235A型光机电一体化实训装置介绍
7
知识链接2:位置传感器介绍
在自动线系统中,一般都会用到大量位置传感器,包括行 程开关和各种接近开关。最常用的有行程开关,电容式传感器、 电感式传感器、光电式传感器和光纤式传感器。除行程开关外 的各类传感器由于都采用非接触式的感应原理,所以也成为接 近开关。接近开关又称无触点行程开关。它能在一定的距离 (几毫米至几十毫米)内检测有无物体靠近。当物体与其接近 到设定距离时,就可以发出“动作”信号。接近开关的核心部分是 “感辨头”,它对正在接近的物体有很高的感辨能力。接近开关与 被测物不接触、不会产生机械磨损和疲劳损伤、工作寿命长、 响应快、无触点、无火花、无噪声、防潮、防尘、防爆性能较 好、输出信号负载能力强、体积小、安装、调整方便; 缺点是 触点容量较小、输出短路时易烧毁。
10
知识链接2:位置传感器介绍
(2) 反射式光电传感器 反射式光电传感器工作原理如图2-1-4所示。
反射式光电传感器也是 集发射器与接收器于一 体,但与漫射式光电传 感器不同的是其前方装 有一块反射板。当反射 板与发射器之间没有物 体遮挡时,接收器可以 接收到光线。当被测物 体遮挡住反射板时,接 收器无法接收到发射器 发出的光线,传感器产 生输出。
6
知识链接1:亚龙YL-235A型光机电一体化实训装置介绍
送料机构的组成: 驱动电机:采用24V直流减速电机,转速为6r/min;用于驱动放 料转盘旋转。 物料支架:将物料有效定位,并确保每次只上一个物料。 出料口传感器:物料检测为光电漫反射型传感器,主要为PLC提 供一个输入信号,如果运行中,光电传感器没有检测到物料并 保持若干秒钟,则应让系统停机然后报警。
3
任务描述:
按下启动按钮,系统进入运行状态,设备正常指 示灯绿灯亮,5S后送料电机驱动放料盘旋转,物料送 到接料平台上;如果送料电机运行10s后,物料检测 传感器仍未检测到物料,则说明送料机构已经无物料 ,设备停止。如果10S内检测到工件,机械手继续抓 料(手工代替)。在这个过程中按下停止按钮,直流 电机停止工作。
器的实物如图2-1-7所示。电感传感 器为三线传感器,接线方法还是棕色
接+24V,蓝色接地,黑色接PLC输入 14
知识链接2:位置传感器介绍
3、光纤式传感器
光纤式传感器把发射器发出的光用光导纤维 引导到检测点,再把检测到的光信号用光纤 引导到接收器。按动作方式的不同,光纤式 传感也可分成对射式、反射式、漫射式等多 种类型。光纤式传感器可以实现被检测物体 不在相近区域的检测。光纤传感器是光纤式 光电开关,属于非功能型的光纤传感器,光 纤传感器具有下述优点:抗电磁干扰、可工 作于恶劣环境,传输距离远,使用寿命长, 此外,由于光纤头具有较小的体积,所以可 以安装在很小空间的地方。光纤传感器实物 如图2-1-8所示,有光纤头与光纤放大器组成, 光纤放大器面板如图2-1-9所示。
1、认识YL-235A的送料机构
送料机构由转盘、调节支架、直流电机、物料、出料口传 感器、物料检测支架几部分组成。三种物料:金属物料、白色 非金属物料、黑色非金属物料存放于放料转盘中。设备启动后 ,由直流电机驱动放料转盘旋转,将物料推到物料支架上,由 出料口传感器检测物料,机 械手将物料搬运走,如果在 运行过程中,光电传感器没 有检测到物料并保持若干秒 钟,则系统停机然后报警。
9
知识链接2:位置传感器介绍
(1)漫射式光电传感器 反射光电传感器工作原理如图2-1-3所示。
漫射式光电传感器集 发射器与接收器于一 体,在前方无物体时, 发射器发出的光不会 被接收器所接收到。 当前方有物体时,接 收器就能接收到物体 反射回来的部分光线, 通过检测电路产生开 关量的电信号输出。
8
知识链接2:位置传感器介绍
1、光电式传感器 光电式传感器是通过把光强度的变化转换成电信号的变化 来实现检测的。光电传感器在一般情况下由发射器、接收器和 检测电路三部分构成。发射器对准物体发射光束,发射的光束 一般来源于发光二极管和激光二极管等半导体光源。光束不间 断地发射,或者改变脉冲宽度。接收器由光电二极管或光电三 极管组成,用于接收发射器发出的光线。检测电路用于滤出有 效信号和应用该信号。常用的光电式传感器又可分为漫射式、 反射式、对射式等几种。
12
知识链接2:位置传感器介绍
YL-235A设备中有两个漫射式光电传感器,一个在送料盘出 口处,另一个在传送带落料口。这两个传感器都是三线制传感 器。棕色线接+24,蓝色线接地,黑色线接PLC输入端。
光电传感器
光电传感器
13
知识链接2:位置传感器介绍
2、电感式传感器 电感式传感器的工作原理如图2-1-6所示。
2
任务1 YL-235A送料机构部件控制的编程与调试
技能目标:
1、能够了解YL-235A型光机电一体化设备送料机构的 组成以及动作过程。 2、了解传感器的工作原理。 3、能够根据送料机构部件控制要求进行地址分配。 4、能够根据送料机构部件控制要求进行电气回路接线。 5、能够根据要求进行程序的编写并调试。
11
知识链接2:位置传感器介绍
(3) 对射式光电传感器 对射式光电传感器工作原理如图2-1-5所示。
对射式光电传感器的发 射器和接收器是分离的。 在发射器与接收器之间 如果没有物体遮挡,发 射器发出的光线能被接 收器接收到。当有物体 遮挡时,接收器接收不 到发射器发出的光线, 传感器产生输出信号。