直流电机伺服驱动器使用说明
伺服电机说明书H3N-TD
伺服电机说明书H3N-TD
伺服电机要处于工作状态,首先必须将SERRVOON信号(伺服使能)接通。
在该信号接通后,伺服驱动器向伺服电机提供直流电源,使用电机线圈处在激磁状态,电机轴为锁定位置。
即外力转动时,很快会回复到原来位置,当驱动器接收到上位机(PLC)送来的脉冲指令信号,电机就会依指令的要求进行运转,电机要正常运转,SERRVOON 信号必须接通,当上位机向驱动器发送脉冲指令信号期间,如果SERRVOON信号断开,驱动器就拒绝接受脉冲指令信号,就会丢失部分脉冲指令信号,所以伺服电机运行之前必须将电机处于SERRVOON信号接通状态,一般情况下,只有在设备维护,故障处理,伺服停止,才使用SERRVOON信号处于断开状态。
闸机伺服驱动器报警44.0过去旋转电机是转化为机械能的方式需要有驱动器驱动电机。
MOTEC_α_SLD智能伺服驱动器操作手册 V3.0 1
操作步骤 为了能使 MOTEC α 智能伺服驱动器能正常运行,请按照以下步骤进行操作和调试: (1) 网络操作模式/独立运行模式: 第一步:按照用户手册的指导安装驱动器硬件和软件; 第二步:利用 MotionStudio 上位机调试软件进行驱动器的调试和试运行; 第三步:利用以下方法之一进行驱动器的应用程序编程 利用 MotionLib 函数库编写应用程序; 独立运行模式编程; 利用驱动器的命令集进行 PLC、HMI 或其它嵌入式设备的编程; 第四步:根据所设计的应用程序和操作步骤对驱动器进行操作。 (2) 脉冲操作模式/模拟信号操作模式: 第一步:按照用户手册的指导安装驱动器硬件接线、软件; 第二步:利用 MotionStudio 上位机调试软件进行驱动器的参数设置; 第三步:利用脉冲或模拟信号控制驱动器驱动电机工作。
MOTEC α SLD 系列智能伺服驱动器
MOTEC αSLD 系列智能伺服驱动器 用户手册
Version 3.0
北京意美德科技发展有限公司 2011-06
北京意美德科技发展有限公司 北京市东城区东中街 58 号 美惠大厦 B 座 P.C. 100027 电话:+86 10-65546546 65542801 65542170 传真:86-10-65547015 网址:
MOTEC α 智能伺服驱动器用户手册
版本说明 版本号: 2009年10月8日发行,第一版。 2010年2月11日发行,第二版。 2011年6月15日发行,第三版。
版权信息: 北京意美德科技发展有限公司(以下简称“意美德”)版权所有。 意美德对本文拥有版权。未经书面授权,不可将本文的全部和部分内容进行复制,翻 印,收录,再加工或任何形式的转让。 本文的编著几经审校。但是,意美德不对其内容和推论中可能存在的错误担责。因用 户原因使用不当而对产品用户造成的直接或间接损失,意美德同样免责。 使用本产品时务必遵照使用说明,以免造成设备或人身伤害。 最新版本的使用说明书可在下载。
伺服驱动器CMMT-AS-C7 12-11A-P3-S1操作说明书

, HEIDENHAIN®, Hiperface®,是商标持有人在相关国家注册的1关于本文件1.1目标人群该文件面向安装及运行该产品的人员。
此外也面向受委托在安全相关系统内规划和应用该产品的人员(符合 EN61508 标准的安全手册)。
1.2适用文件产品的用户文档包含以下文件:1.3产品版本本文件基于以下版本:–R01 及以上版本的伺服驱动控制器 CMMT-AS-...-S1,请参阅产品标识1.4产品标签•请注意产品上的说明。
产品标签位于设备右侧。
产品标签用于识别产品,显示如下信息:位于产品正面的警告标志产品上的警告提示在设备右侧有以下警告提示:1.5指定标准2安全2.1安全注意事项一般安全注意事项–仅允许由具备资质的专业人员进行装配和安装。
–请仅在技术状态完好的情况下使用本产品。
–仅在原装状态下使用产品,请勿擅自进行改动。
–不允许对本产品进行维修。
若产品损坏,则立即更换。
–请注意产品上的各种标识。
–请注意使用场所的环境条件。
不遵守环境条件和连接条件可能造成功能故障并导致安全功能丧失。
–本产品可能产生高频干扰,在居住环境内可能需要采取抗干扰措施。
–在运输和装配拆卸重型规格的产品时,请穿戴规定的个人防护装备。
–禁止在带电的情况下插拔插头。
–只允许松开产品上的以下螺钉:–散热器上用于固定电源侧地线接地的螺丝–壳体正面屏蔽夹的固定螺丝–仅限在 IT 电网中使用时:用于连接内置电源滤波器和保护接地的螺丝–将产品安装到适合的控制柜中。
控制柜的防护等级必须至少为 IP54。
–只有当所有要求的保护措施都到位的时候 ( è EN60204-1),才可以运行本产品。
–将产品上的导电电缆完全绝缘。
对于电源连接,建议使用带有塑料套管的芯线套管。
接线时请注意必要的剥线长度。
–关于剥线长度的信息 è 手动 装配 , 安装 。
–注意正确接地和屏蔽连接。
–调试前请确保,连接的执行机构产生的运动不会伤害到人员。
RoboModule伺服电机驱动器用户手册

Page 3Biblioteka 直流伺服电机驱动器用户手册
深圳市靠岸科技有限公司
典型应用场景
RoboModule 直流伺服电机驱动器可以适用于任何有刷直流电机的控制的场合。
直流伺服电机驱动器用户手册
深圳市靠岸科技有限公司
电机接口
功能按键
编码器 接口
SWD 调试接口
24V 电源 输入输出
接口 1
24V 电源 输入输出
接口 2
CAN 总线 输入输出
接口 1
Page 7
CAN 总线 输入输出
接口 2
TTL 串口调试
接口
直流伺服电机驱动器用户手册
深圳市靠岸科技有限公司
下面对上述所有接口进行详解:
本驱动器的 T~~~~其他串口设备的 R
本驱动器的 G~~~~其他串口设备的 G
本驱动器的 R~~~~其他串口设备的 T(备注:在所有的通信接口中,只有串口需要 T 和 R 交叉连接)
此串口调试接口,可以与 USB 转串口小板相连后与 PC 机通信,配合配套的“RoboModule 电机驱动调
试软件”来进行电机的编号设置、电机方向设置、编码器方向设置、各环路 PID 参数设置等。
它集成了开关电源降压电路、线性电源降压电路、功率驱动电路、电流采样电路、CAN 通信电路、蜂鸣器报 警电路、LED 指示灯电路、STM32 最小系统电路等在一块 50mm*50mm 的 PCB 电路板上。体积小、质量 轻、性能好。
它具有如下接口:电源接口、CAN 通信接口、增量式编码器数据采集接口、电机接口、TTL 串行通信接口、 SWD 调试接口。
TSDA-C21B直流伺服驱动器用户手册说明书

TSDA-C21B 直流伺服驱动器用户手册目录 (1)前言 (2)安全注意事项 (3)概述 (5)一. 基本特性 (5)二. 适用领域 (5)三. 技术指标 (5)四. 接口定义 (6)4.1 电源/电机接口 (6)4.2 编码器接口 (7)4.3 通讯接口 (7)4.4 报警信息查询 (8)4.5 控制接口 (8)五. 控制方式 (9)5.1基本控制 (9)5.2 RS232通讯控制 (10)5.3 CAN通讯控制 (14)5.4 CAN通讯控制应用说明 (21)5.5 CAN通讯控制应用实例 (22)5.6 RS485通讯控制 (25)5.7 RS485通讯控制实例 (28)5.8 IDS调试软件设置实例 (32)六.控制信号典型接线 (34)七.外形安装尺寸 (35)前言本手册阐述了TSDA-C21B低压直流伺服驱动器(5W~1500W范围)的安装、调试、维护、运行等方面。
使用前,请认真阅读本手册,熟知本产品的安全注意事项。
本手册,因产品改进、规格、版本变更等原因,将会适时改动,本公司将不另行通知。
在使用本公司产品时如有任何疑问,请查阅相关说明书或致电联系本公司技术服务部,我们会在最短的时间内满足您的要求。
符号与警示标志:危险:表示该操作错误可能危及人身安全!注意:表示该操作错误可能导致设备损坏!安全注意事项开箱检查缺少零部件和受损的控制器,切勿安装;伺服驱动器必须与之匹配的伺服电机配套使用。
安装安装在不易燃烧的金属架上,防止尘埃、腐蚀性气体、导电物体、液体及易燃物侵入,并保持良好的散热条件;安装时,一定拧紧驱动器的安装螺钉,伺服驱动器和伺服电机应避免震动,禁止承受冲击。
接线请由专业电气工程人员进行接线作业;接线前,请确认输入电源是在切断状态,接线和检查必须在电源切断且驱动器指示灯熄灭后进行,防止电击;对驱动器的接线端子进行插拔时,请确保在驱动器指示灯熄灭后再进行;接地端子PE须通过驱动器左边镙钉可靠接地;请在控制器外部设置急停电路;请勿将电源输入线接到输出U、V、W端子上;请用合适力矩紧固输出端子。
DC系列伺服驱动器使用说明书

DC系列伺服驱动器使用说明书DC s e r i e s ser v o d r i v er u s e n g m a n u a l深圳市欧诺克科技有限公司DC 系列伺服驱动器型号说明备注: 1.驱动器供电电压必须大于或者等于电机额定电压2.驱动器的额定电流必须大于或者等于电机的额定电流DCPC-09012- OP E B系列DC/DE/DE2/BC/BC2/DH/BH制动单元B:带制动单元反馈E:光电增量式A/B 正交C:磁电增量式A/B 正交 A17:光电绝对值17bit C17:磁电绝对值17bit R:旋转变压器 H:数字霍尔 S:模拟量正余弦输入指令P:脉冲Hp:高速脉冲A:模拟量R:RS485 C:CANopen E:EtherCAT特殊功能OP:脉冲输出 OA:模拟量输出R:轮切 F:追剪 Z:攻丝机专用额定电流16:16Amps(11Arms) 50:50Amps(35Arms) 150:150Amps(105Arms)供电电压090:18-90VDC 180:18-180VDC 135:18-135VDC 220:220VAC 380:380VAC A:单相B:三相DC 系列驱动器规格汇总表驱动器型号供电电压连续电流 Amps(Arms) 峰值电流 Amps(Arms)6S 反馈类型外形尺寸重量DCPC-09002-OPE 2A (1.4A ) 6A (4.2A )133*90*32mm0.35kgDCPC-09004-OPE 4A (2.8A ) 8A (5.6A )DCPC-09008-OPE 8A (5.6A ) 24A (16A )DCPC-09016-OPE 16A (11A ) 48A (33A )DCPC-09024-OPE 24A (16A ) 50A (35A )DCPC-09030-OPE 30A (21A ) 60A (42A )167*100*35mm0.45kgDCPC-09040-OPE 40A (28A ) 80A (56A )DCPC-09050-OPE 50A (35A ) 100A (70A )DCPC-09075-OPE 75A (52A ) 150A (105A )200*114*59mm 1.10kg DCPC-090100-OPE 100A (70A ) 200A (140A )DCPC-090125-OPE 125A(88A)250A(177.5A)DCPC-090150-OPE 150A (105A ) 250A (175A )221*140*59mm 1.45kg DCPC-090200-OPE 200A (140A ) 300A (210A )221*140*90mm 1.8kg DCPC-090300-OPE 300A (210A ) 420A (294A )DCPC-090300-OPE(新) 300A (210A ) 420A (294A )265*140*90mm 2kg DCPC-18024-OPE 18~180VDC 24A (16A ) 50A (35A )167*100*35mm 0.45kg DCPC-18050-OPE 50A (35A ) 100A (70A )200*114*59mm 1.10kg 75A (52A ) 150A (105A )DCPC-18075-OPE 100A (70A ) 200A (140A )221*140*59mm 1.45kg DCPC-180100-OPE DCPC-135100-OPE 18~13518~90VDC增量式DC 系列外形尺寸图L L 1WHH 3H2H1W1H4 HW2H4 HW 3W4型号L L 1W W1W2W3W4H H1H2H3H4DC-2A~24A 14113432/ 4.5/15.5895118 4.5134DC-30A~50A 16716035/2-4.5/19.510051224-4.5160DC-75A100A 200190594-5.0/25/1146032.54-4.8190DC-100AF 200190594-5.0/25/1146032.54-4.8190DC-150A 221211595/25/1406045 4.8211DC-150AF 221211595/25/1406045 4.8211DC-200A 221211905/25/140///211DC-300A 221211905/25/140///211DC-300A (新)265255905/25/140///255DC 系列端子定义J3J1 J2 J3S1J4 J5J6 J75 4 3 2 11、产品简介:1. 1 概述DC系列可编程智能伺服驱动器是一款通用、高性能、直流供电、结构紧凑的全数字伺服驱动器。
servodrive EDB-10P伺服驱动器说明书
servodrive EDB-10P伺服驱动器说明书变频调速就是通过改变电动机电源频率实现速度调节的。
主要采用交一直一交方式,先把工频交流电源通过整流器转换成直流电源,然后再把直流电源转换成频率、电压均可控制的交流电源以供给电动机。
变频器的电路一般由整流、中间直流环节、逆变和控制4个部分组成。
整流部分为三相桥式不可控整流器,逆变部分为IGBT三相桥式逆变器,且输出为PWM波形,中间直流环节为滤波,servo伺服驱动器说明书、直流储能和缓冲无功功率。
伺服系统的工作原理简单的说就是在开环控制的交直流电机的基础上将速度和位置信号通过旋转编码器、旋转变压器等反馈给驱动器做闭环负反馈的PID调节控制。
再加上驱动器内部的电流闭环,通过这3个闭环调节,使电机的输出对设定值追随的准确性和时间响应特性都提高很多,servo伺服驱动器说明书。
伺服系统是个动态的随动系统,达到的稳态平衡也是动态的平衡,servo伺服驱动器说明书。
伺服电机要处于工作状态,首先必须将SERRVOON信号(伺服使能)接通。
Robomodule RMDS 系列直流伺服电机驱动器用户手册-限位开关接口说明说明书
CTL1&CTL2-限位开关接口说明-概述本篇文档适用于RMDS系列102、107、108、301、302、303、303+、305(这些是单端的)201、40x(这些是光耦隔离的,内置等效限流电阻为330R)105、105+、(这些是光耦隔离的,内置限制电阻2.2K)等多个版本的驱动器。
102、107、108、301、302、303、303+、305的限位开关接口概述上述标题涉及的驱动器具备2个限位开关接口,该接口位于CTL1、CTL2上,2018年之后的固件,无需在调试软件上配置即可使用。
该接口默认为低电平状态,使用普通的机械开关作为输入源时候,请将触碰开关的一端接到CTL端口上,另一端接到5V电源,该5V电源可以从编码器接口处取电。
注意:CTL1、CTL2端口最大耐压值为5.5V,请勿使用超过5.5V的电源直接接入CTL端口。
CTL1、CTL2端口的内部电路如下:注意:驱动器内部仅只是读取限位开关端口(CTL1和CTL2)的电平状态然后发送到RS232端口或者CAN总线上。
具体的,当触碰开关触发后,或者触发多久后,执行什么样的操作,全部由外部控制器决定,需要在外部控制器上自行编写控制策略程序。
具体如何读取限位开关端口的电平状态,请参考:1.RS232通信协议的左右限位开关部分。
2.CAN通信协议的左右限位开关部分。
102、107、108、301、302、303、303+、305的限位开关接口接线方案(以102驱动器举例,上述其他型号驱动器接线方式基本一致)201、40x的限位开关接口概述上述标题涉及的驱动器具备2个限位开关接口,该接口位于CTL1+、CTL1-和CTL2+、CTL2-上,2018年之后的固件,无需在调试软件上配置即可使用。
该接口使用光耦隔离,内置等效串联电阻330R,也就是说,对CTL1+通上5V或者3.3V,对CTL1-接GND,此光耦就会点亮。
当光耦点亮时候,从RS232或者CAN读取的CTL1限位开关的状态值为1当光耦熄灭时候,从RS232或者CAN读取的CTL1限位开关的状态值为0105、105+的限位开关接口概述上述标题涉及的驱动器具备2个限位开关接口,该接口位于CTL1+、CTL1-和CTL2+、CTL2-上,2018年之后的固件,无需在调试软件上配置即可使用。
robomodule rmds 系列直流伺服电机驱动器用户手册说明书
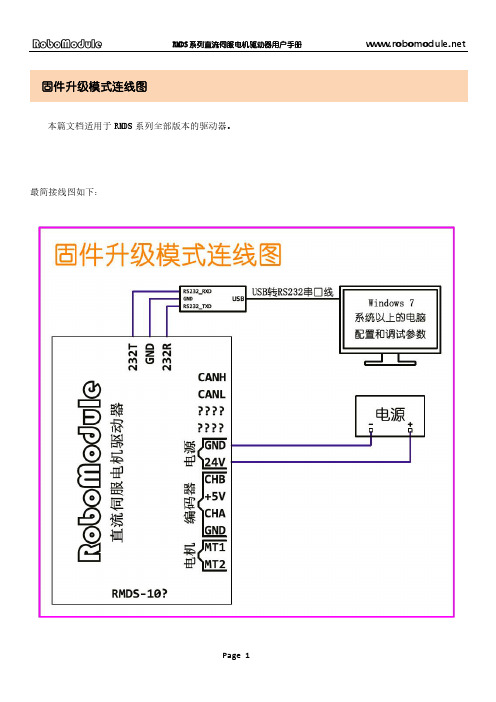
固件升级模式连线图本篇文档适用于RMDS系列全部版本的驱动器。
最简接线图如下:注意事项固件升级模式只需要连上RS232串口线和电源,其他线都可以不连。
当然,要是连上了也无所谓。
固件升级就是传统意义上的刷机。
刷机有风险,操作需谨慎,所以请务必认真对照说明书来进行固件升级,并注意以下的红色字体的加粗文字。
特别注意的:10x系列和30x系列共用同一个bin文件升级,一般命名为10x+30x 2017xxxx.bin40x使用的另外一个bin文件升级,一般命名为 40x 2017xxxx.bin两个使用了不同的主芯片,不能互换,刷错固件只能寄回返修。
另外特别指明:CH340串口线不能用来升级和调试驱动器,CH340官方已经声明,CH340转换出来的电平只是TTL的反相,不是标准的RS232,升级会造成数据出错,严重时将无法再次启动驱动器,只能寄回返修。
PL2303的串口线也不推荐使用,主要是因为质量差,不稳定,时好时坏,且不确定何时会突然坏。
CH340在任务管理器的描述是:USB-SERIAL CH340 (COMx)PL2303在任务管理的描述是: Prolific USB-to-Serial Comm Port (COMx)部分电脑主板自带串口,也是使用CH340,但任务管理描述只是显示“通信端口(COM1)”,请注意甄别。
新购买的驱动器,内置的固件默认都是最新固件,不需要进行固件升级。
从USB转RS232线的DB9接头出,引入到驱动器的232端口,刷固件时候,限制线的长度不能超过20cm,不能有任何的转接,包括转接出去的。
如下最佳:请注意以下几点:①确认当前RS232串口波特率是115200。
②升级过程中,切不可断开驱动器的电源。
③升级过程中,切不可断开RS232串口线。
④升级过程中,切不可关闭<RoboModule 电机驱动器调试软件>。
违反以上任何一条,都会将驱动器刷成板砖。
第一步,打开<RoboModule 电机驱动器调试软件>,选择合适的<串口号>,<波特率>选择115200,然后点击<进入调试模式>:如果先前修改过RS232串口的波特率,请先将波特率改回115200,再进行这一步的操作。
DA98伺服驱动器使用说明
DA98伺服驱动器使用说明一、产品简介DA98伺服驱动器是一种高性能的伺服控制系统,广泛应用于各种自动化设备中。
它采用先进的电子技术和数字控制算法,能够快速准确地控制电机运动,达到精确的位置控制和速度控制。
该驱动器具有体积小、重量轻、功率密度高等特点,适用于各种工业场合。
二、产品特点1.广泛适用:DA98伺服驱动器适用于各类交流伺服电机,包括无刷直流电机、有刷直流电机等。
2.高性能:采用先进的控制算法和电子技术,实现高精度的位置和速度控制。
3.响应快:DA98伺服驱动器具有快速响应的特点,能够实现快速准确的运动控制。
4.可靠性高:采用高品质的元器件和优化设计的电路板,确保驱动器的稳定可靠性。
5.用户友好:设计简洁、易于使用,提供多种设置和调试功能,方便用户操作。
三、使用方法1.连接电源:将伺服驱动器的电源端子正确接入交流电源,确保电源电压符合要求。
2.连接电机:将伺服驱动器的电机接口正确连接至电机的对应端子,确保相位和极性正确。
3.连接控制信号:将控制信号接口正确连接至控制器的对应端子,确保信号传输的可靠性。
4.参数设置:通过驱动器的面板或调试软件,设置驱动器的各种参数,如速度、加速度、位置等。
5.检测和调试:运行驱动器,并观察电机的运动情况,根据需要进行参数微调。
6.运行控制:通过外部设备或控制模块发送指令,实现对电机的位置和速度控制。
四、注意事项1.正确接线:在连接电源、电机和控制信号时,务必确保接线正确无误,避免因接线错误而导致故障或事故。
2.电源保护:在连接电源时,需使用额定电压的电源,并确保电源线路稳定,避免因电压突变而对驱动器造成伤害。
3.参数设置:在设置驱动器参数时,应根据实际需要进行合理设置,不宜盲目调整,以防影响系统的稳定性。
4.温度控制:驱动器在工作过程中会产生一定的热量,请确保通风良好,避免过高的温度对驱动器正常工作造成影响。
5.安全防护:请合理安装和使用伺服驱动器,确保设备周围的安全措施完备,以降低意外风险。
IXL-II伺服驱动器 EtherCAT 快速应用手册 V1.0说明书

IXL-II伺服驱动器 EtherCAT 快速应用手册V1.0上海同毅自动化技术有限公司声明本文档所涉及产品包含本公司知识产权,未经允许不可擅自复制使用,亦不可向任何第三方传播,因文档复制或泄露导致的任何机密泄露及经济损失,本公司将追究其法律责任。
本产品使用了 EtherCAT 技术,“EtherCAT® 是注册商标和专利技术,由德国倍福自动化有限公司授权。
本产品已通过 CE 认证,符合 EN55022 及 EN55024 标准。
1版本说明V1.0 2020.9.01 Created2目录声明 (1)版本说明 (2)一、产品概要 (4)二、安装与连接 (5)三、开发及调试 (7)3.1 BeckHoff TwinCAT3 连接测试 (7)3.2 BeckHoff TwinCAT3 MOTION 测试 CSP 功能 (9)34一、产品概要IXL-II全新一代低压伺服驱动器是一款高性能、全功能型的低压直流伺服驱动器。
支持电流范围从10A-300A,支持电压范围20-90VDC,最大连续输出功率可达20KW。
可用于驱动低压伺服电机、低压直流无刷电机、低压直流有刷电机等,可广泛应用于移动式自动引导车(AGV)、机器人、军工、半导体设备、医疗设备等场合。
功能特点● 支持控制模式:力矩(PT)、速度(PV)、位置(PP)、回零 (Home)、IP、CSP、CSV、CST; ● 支持模拟量指令、脉冲指令,8 DI、4 DO;● 支持通信总线:CANOpen、RS485(ModBus-RTU) 、EtherCAT;● 全面的反馈支持:增量编码器、SSI 绝对值编码器、BISS-C\B 绝对值编码器、多摩川NRZ 绝对值编码器、旋转变压器等;● 强大的自学习功能,轻松适配各类电机; ● 优化算法支持低电感空心杯电机; ● 满足CE 与ROSH 认证;规格型号定义5二、安装与连接EtherCAT 网络一般由一部主站(例如 BeckHoff控制器)以及一系列的从站构成(如伺服控制器,总线端子等)。
直流伺服驱动器使用手册
直流伺服驱动器使用手册第一章引言1.1 背景直流伺服驱动器是一种用于控制直流电机运动的设备。
它能够通过给定的电信号控制电机的转速和位置。
在工业自动化和机械控制领域,直流伺服驱动器被广泛应用于精确控制和定位任务中。
1.2 目的本使用手册的目的是为用户提供有关直流伺服驱动器的详细信息和操作指南,以便能够正确地安装、调试和操作该设备。
通过阅读本手册,用户将能够充分了解直流伺服驱动器的特性、工作原理和使用方法。
第二章设备概述2.1 设备组成直流伺服驱动器由多个组件组成,包括电源模块、控制模块、驱动模块和反馈模块。
这些模块相互配合,共同实现对直流电机的控制。
2.2 设备特性直流伺服驱动器具有以下主要特性:- 高精度控制:能够以微秒级的精度控制电机的转速和位置。
- 宽工作范围:支持多种电机规格和工作电压范围。
- 多种控制模式:支持速度控制、位置控制和力矩控制等多种控制模式。
- 可编程接口:提供丰富的接口和功能,用户可以根据需要进行自定义编程。
- 高可靠性和稳定性:采用先进的电路设计和保护机制,确保设备的可靠性和稳定性。
第三章安装和接线3.1 安装要求在安装直流伺服驱动器之前,用户需要确保以下条件满足:- 安装环境应具备良好的通风和散热条件。
- 安装位置应符合设备的空间要求和连接线的长度要求。
- 电源电压和频率应符合设备的规格要求和电网的供电标准。
3.2 接线方法根据直流伺服驱动器的接线图和用户手册提供的接线指南,用户可以按照以下步骤进行接线:1. 确定电源线的连接位置,并将其与电源模块的输入端子相连。
2. 根据需要,将控制信号的输入和输出线连接到控制模块的相应端子。
3. 将电机的电源和反馈信号线连接到驱动模块和反馈模块的相应端子。
4. 检查所有接线是否牢固,确保没有接错线或接反问题。
第四章调试和操作4.1 调试步骤在正确安装和接线后,用户需要进行调试和配置直流伺服驱动器,以确保其正常工作。
以下是一般的调试步骤:1. 检查设备的电源是否正常开启,并检查所有开关和指示灯的状态是否正常。
LMD18200T直流电机驱动板使用说明

1 LMD18200T直流电机驱动板使用说明
1、驱动板尺寸:51mmX46mmX28mm。
2、主要芯片:LMD18200。
3、工作电压:控制信号直流4.5~5.5V。
4、直流电机驱动电压高达55V,建议实际使用12--48V(不能低于12V),具有驱动电源指示。
5、最大输出电流3A(瞬间峰值电流6A),最大输出功率75W。
6、电机转速可通过PWM方式实现平滑调速。
7、抗干扰能力强。
8、具有续流保护。
9、可单独控制一台直流电机或电磁铁或单双向螺线管等。
10、可实现正反转。
2 接口说明
注意:电源和地不要接反,以免损坏器件。
3 主要芯片介绍
LMD18200是美国国家半导体公司(NS)推出的专用于直流电动机驱动的H桥组件。
同一芯片上集成有CMOS控制电路和DMOS功率器件,利用它可以与主处理器、电机和增量型编码器构成一个完整的运动控制系统。
LMD18200广泛应用于打印机、机器人和各种自动化控制领域。
1、主要性能
峰值输出电流高达6A,连续输出电流达3A;
工作电压高达55V;
Low RDS(ON) typically 0.3W per switch;
TTL/CMOS兼容电平的输入;
无“shoot-through”电流;
具有温度报警和过热与短路保护功能;
结温达170℃时,芯片关断;
具有良好的抗干扰性。
2、典型应用
驱动直流电机
伺服机构系统位置与转速
应用于机器人控制系统
应用于数字控制系统
应用于电脑打印机与绘图仪3、LMD18200逻辑真值表。
RMDS 系列直流伺服电机驱动器用户手册说明书
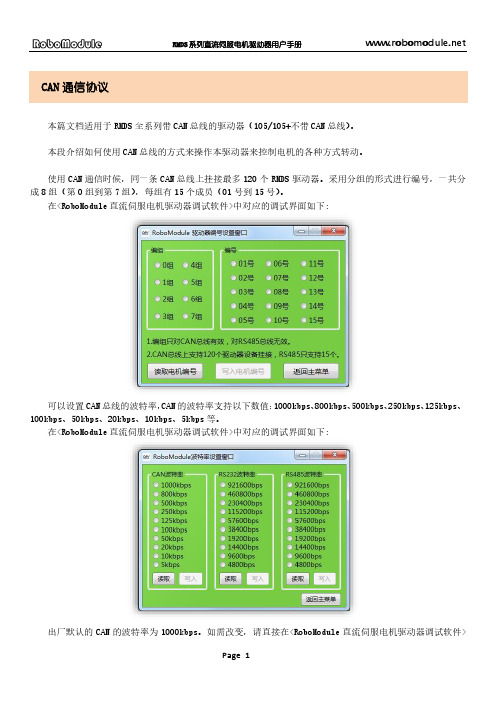
CAN通信协议本篇文档适用于RMDS全系列带CAN总线的驱动器(105/105+不带CAN总线)。
本段介绍如何使用CAN总线的方式来操作本驱动器来控制电机的各种方式转动。
使用CAN通信时候,同一条CAN总线上挂接最多120个RMDS驱动器。
采用分组的形式进行编号,一共分成8组(第0组到第7组),每组有15个成员(01号到15号)。
在<RoboModule直流伺服电机驱动器调试软件>中对应的调试界面如下:可以设置CAN总线的波特率,CAN的波特率支持以下数值:1000kbps、800kbps、500kbps、250kbps、125kbps、100kbps、50kbps、20kbps、10kbps、5kbps等。
在<RoboModule直流伺服电机驱动器调试软件>中对应的调试界面如下:出厂默认的CAN的波特率为1000kbps。
如需改变,请直接在<RoboModule直流伺服电机驱动器调试软件>上操作修改即可。
另外,RMDS系列驱动器的所有CAN消息都是数据帧、标准帧、帧长度为8,这些不可修改。
使用CAN总线来操作驱动器之前,必须先使用RS232串口线将驱动器连接至电脑,来进行参数调试,所涉及的调试内容有:1.调节电机和编码器的方向,确定电机转动的正方向,并使驱动器能够正常的进行调速或者位置控制。
2.调节驱动器三个环路的PID参数,使驱动器最大程度的匹配所连接的电机和编码器。
3.设置驱动器的编组和编号。
4.设置CAN的波特率。
(默认为1000kbps)在CAN通信协议下,主控器对驱动器的操作命令有如下12种:1.让驱动器复位。
2.让驱动器进入以下的8个运动模式的其中一个3.开环模式下,给驱动器发送数据指令4.电流模式下,给驱动器发送数据指令5.速度模式下,给驱动器发送数据指令6.位置模式下,给驱动器发送数据指令7.速度位置模式下,给驱动器发送数据指令8.电流速度模式下,给驱动器发送数据指令9.电流位置模式下,给驱动器发送数据指令10.电流速度位置模式下,给驱动器发送数据指令11.配置驱动器对外发送电流、速度、位置等数据的周期和对外发送CTL1、CTL2的电平状态的周期。
数字式直流伺服驱动器

引脚序号 7 8 9 10 11 12
信号 E+5V PHASE A PHASE B DIR STEP +5V
描述 编码器电源正极
编码器 A 相 编码器 B 相
方向 脉冲 控制信号电源
(2)控制信号接口
控制信号接口电路图如图 2 所示。
Tel: (86)755-26471129
图 1 机械安装尺寸图
二. 特点
l 供电电压最高达 50V l 峰值电流 0~20A,功率 20~400W l 编码器 4 倍频解码 l 过流、短路保护
三. 应用领域
l 超小体积 l 数字式脉冲接口 l 跟踪误差最大+/-128 个计数值 l 阻尼、增益可调,内置积分反馈
适合中小型雕刻机、割字机、自动抓取设备、专用数控机床等。在用户期望振动极小、 超低噪音、高精度和高速度的设备中使用,效果特佳。
DB810 报警时,ERR/RES 电平为 0V,报警指示灯亮。您可通过检测 ERR/RES 脚的电 平来判断 DB810 是否处于报警状态,而要解除报警状态只需 ERR/RES 脚接至 E+5V 几秒即 可。
Tel: (86)755-26471129
图 4 伺服报警和复位电路图
Fax: (86)755-26402718
① 过阻尼:减少阻尼(DAMP)或者增加增益(GAIN)。
② 临界阻尼:不需任何调节,正好。
③ 欠阻尼:减少增益(GAIN)或者增加阻尼(DAMP)。
Tel: (86)755-26471129
图 5 DB810 示意图
Fax: (86)755-26402718
6
URL:
如果电机微小跳动后“FAULT”指示灯立即点亮,则可能是电机线连接错误或电位器位 置设置不对,请检查电位器的设置;如果电位器的设置正常,可交换电机线,然后再试一次。 如果您按前面步骤操作后驱动器仍不工作,请与雷赛公司联系。
伺服驱动器使用说明
伺服驱动器使用说明首先,使用伺服驱动器之前,您需要确保以下几个方面:1.电源和接地:伺服驱动器需要稳定的电源供应,一般为交流电源或直流电源。
同时,接地连接也是非常重要的,它可以确保设备的安全工作。
2.电机参数设置:伺服驱动器需要了解电机的参数,包括电压、电流等。
在使用之前,请确保您已正确设置了相关参数,这样伺服驱动器才能根据电机的要求进行工作。
3.连接电机和驱动器:伺服驱动器和电机之间需要正确的连接。
通常,伺服驱动器会提供详细的接线图,您可以根据图示来连接电机和驱动器。
请确保连接正确,以免引起故障或损坏设备。
接下来,我们来看一下伺服驱动器的使用方法:1.信号输入:伺服驱动器通常通过输入信号来控制电机的运动。
您可以使用模拟信号或数字信号来输入控制指令。
在输入信号之前,您需要了解伺服驱动器所需的信号类型和范围,并根据要求进行设置。
2.运动模式选择:伺服驱动器通常支持多种运动模式,如位置模式、速度模式和扭矩模式等。
您可以根据需要选择合适的运动模式,并设置相关参数。
不同的模式有不同的工作方式和控制方法,所以在选择模式之前,请务必详细了解其特点和适用范围。
3.参数调节:伺服驱动器通常提供了多个参数可供调节,以适应不同的应用场景。
您可以通过伺服驱动器的参数设置界面,来调节转速、位置、加速度和减速度等参数。
在调节参数时,请务必按照设备的要求和电机的特性进行设置,以保证设备的正常运行。
4.报警处理:在使用伺服驱动器时,可能会出现一些异常情况,如超速、过载等。
当发生异常现象时,伺服驱动器通常会发出报警信号,以提示用户进行处理。
您需要仔细查看伺服驱动器的故障代码手册,并根据报警代码进行相应的调整或修复。
最后,需要提醒的是,伺服驱动器涉及到电气和机械等方面的知识,所以在使用之前,您需要具备相关的知识和技能。
如果您对伺服驱动器的使用和调节不熟悉,建议您请专业人士进行操作和维护,以避免不必要的损失和风险。
通过本文的介绍,希望能够帮助您更好地了解和使用伺服驱动器。
直流伺服驱动器使用手册

MMT- 直流伺服驱动器使用手册济南科亚电子科技有限公司直流伺服驱动器使用说明书一、概述:该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。
二、产品特征:◇PWM控制H桥驱动◇四象限工作模式◇全隔离方式设计◇线形度好、控制精度高◇零点漂移极小◇转速闭环反馈电压等级可选◇标准信号接口输入0--±10V ◇开关量换向功能◇零信号时马达锁定功能◇上/下限位保护功能◇使能控制功能◇上/下限速度设定◇输出电流设定功能◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能三、主要技术参数◇控制电源电压AC:110系列:AC :110V±10% 220系列:AC :220V±10% ◇主电源电压AC:110系列:AC 40----110V 220系列:AC50---- 220V ◇输出电压DC:110系列:0—130V或其它电压可设定220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A)DC 10A(最大输出电流15A)DC 20A(最大输出电流25A)◇控制精度:0.1% ◇输入给定信号:0—±10V ◇测速反馈电压:7V/1000R 9.5V/1000R 13.5V/1000R 20V/1000R 可经由PC板内插片选定并可接受其它规格订制四、安装环境要求:◇环境温度:-5oC ~ +50oC ◇环境湿度:相对湿度≤80RH。
(无结露)◇避免有腐蚀气体及可燃性气体环境下使用◇避免有粉尘、可导电粉沫较多的场合◇避免水、油及其他液体进入驱动器内部◇避免震动或撞击的场合使用◇避免通风不良的场合使用五、电源输入说明该驱动系统分两路电源输入:即U1、V1为主电源输入,U2、V2为控制电源输入。
仕章直流伺服驱动器说明书
仕章直流伺服驱动器说明书【一、仕章直流伺服驱动器简介】仕章直流伺服驱动器是一款高性能的伺服驱动设备,广泛应用于各种工业自动化领域。
它具有出色的控制性能和稳定的输出特性,能够满足各类负载需求。
仕章直流伺服驱动器采用先进的控制算法,具有快速响应、高精度、高效率等特点。
【二、仕章直流伺服驱动器的主要性能参数】1.额定功率:根据不同应用场景,提供多种功率可选,以满足各类负载需求。
2.转矩:仕章直流伺服驱动器具有较大的转矩容量,可适应不同的工作环境。
3.速度:高速、中速、低速等多种速度模式可选,满足各种运动控制需求。
4.控制方式:采用闭环控制,具有更高的控制精度和稳定性。
5.保护功能:具备过压、过流、过热、短路等多种保护功能,确保设备安全运行。
【三、仕章直流伺服驱动器的应用领域】1.工业自动化:如数控机床、机器人、输送线等。
2.电子设备:如半导体设备、贴片机、印刷机等。
3.医疗器械:如手术机器人、医疗设备等。
4.科研领域:如实验室仪器、试验设备等。
【四、仕章直流伺服驱动器的使用方法】1.安装:根据实际应用场景选择合适的驱动器型号,并按照说明书进行安装。
2.接线:正确连接输入电源、输出电机、控制信号等线路。
3.调试:调整参数设置,包括速度、转矩、位置等,以满足实际需求。
4.维护:定期检查驱动器运行状态,及时更换损耗部件,保持设备良好状态。
【五、仕章直流伺服驱动器的维护与保养】1.保持驱动器清洁,避免进水、灰尘等影响设备性能。
2.定期检查电缆、接头等易损部件,确保连接可靠。
3.检查冷却风扇运行情况,确保驱动器散热良好。
4.定期加注润滑油,保持电机轴承良好润滑。
【六、总结】仕章直流伺服驱动器具有出色的性能和广泛的适用领域,为各类工业自动化设备提供了高效的驱动解决方案。
欧诺克 直流伺服电机 驱动器 产品说明书

深圳市欧诺克科技有限公司Shenzhen ONKE Technology Co., Ltd.座机:*************27381841电话:邓先生135****7106陈先生139****0920邮箱:***************网 址 : 地址:广东省深圳市宝安区福海街道怀德翠湖工业园13栋稳定的质量是我们赖以生存的根本优质的服务是我们继续发展的前提客户的满意是我们唯一追求的目标产品画册Product gallery专业生产伺服驱动器、伺服电机及自动化控制系统深圳市欧诺克科技有限公司直流伺服驱动器电机09目录匠心制造精益求精“一、公司介绍01(一) 直流伺服驱动器021.驱动器介绍与型号说明032.DC系列技术指标033.DE系列技术指标044.DE2系列技术指标055.驱动器应用领域066.驱动器外设配件07(二) 直流伺服电机081.电机介绍与型号说明2.电机应用领域3.电机规格参数表4.电机规格尺寸图101112C O M P A N Y PROFILE以精密制造引领未来Leading the future with precision manufacturing公司简介Company Profile深圳市欧诺克科技有限公司成立于2010年,是一家专业研发生产伺服电机和驱动器的高新技术企业,公司技术力量雄厚,检测手段先进,欧诺克人本着不求最全,只求最精的信念,为生产出各类伺服电机、各类驱动器而不懈奋斗。
欧诺克人以鹰的精神,挑战尖端,研发生产出高性价比的各类伺服电机和驱动器,以鹰的敏锐洞察力洞察市场,与时俱进、创新来满足市场的需求。
深圳市欧诺克科技有限公司产品主要有:伺服驱动器、伺服电机、直流伺服驱动器,直流伺服电机,交流伺服驱动器,交流伺服电机,低压伺服驱动器,低压伺服电机,直线电机驱动器,DDR马达驱动器,音圈电机驱动器,直流无刷驱动器,直流无刷电机,CANopen总线、EtherCAT总线、电子凸轮伺服系统,大功率伺服驱动器、大电流伺服驱动器,专用运动控制伺服驱动器和自动化控制系统,十多年来凭借精湛的技术与国内国外众多知名企业公司建立了互利共赢的合作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直流电机伺服驱动器使用说明一.概况ED系列直流电动机伺服驱动器是针对本公司生产的空心杯系列直流电动机、无刷电动机开发设计的控制器,可对电动机的各种运动功能进行精确的控制,电路采用MOTOROLA公司生产的直流电动机伺服控制芯片,IR公司的MOSFET管做功率驱动组成H桥驱动级,集成度高,体积小,功率密度大,工作稳定可靠,功能齐全,是电机驱动器的最佳选择。
可与E-Drive系列的直流电机、无刷电机等产品配套使用,能为您提供电机运动灵活控制方面完整的解决方案。
二.功能特点简介1. 方便灵活的转速调整及开环闭环的转速控制2. 灵活的转向控制与设定3. 方便的使能控制4. 瞬间的刹车制动控制5. 设有LED工作状态指示6. 能实现多种控制功能的用户控制接口7. 设有编码器信号接口,用户利用外部微处理器能对电机的运动状态及运动位置等进行灵活控制8. 体积小,功率密度大9. 设有多重保护电路使工作稳定可靠10.电路能在瞬间吸收电机因制动及换向造成的冲击电流和反冲电压三.产品电气参数型号:ED-Y1030A1输入电源电压:18V-30V 直流纹波≤5%最高输出电压:28V 脉动最大负载电流:8A 连续过载保护电流:≥10A 最大吸收反冲电流:40A 最大驱动功率:200W 连续外部调速控制输入电压:0—5V控制接口电平:高电平≥4.5V,低电平≤0.8V 最大效率:90%环境温度:-20℃~+40℃,最大温升30℃四、转速控制电压与输出量关系图:五、外形结构尺寸长宽高=76*53*28(mm)安装脚尺寸=76*73(mm)安装孔:63*68(mm)外形结构图:六、控制接口端1.控制接口采用TTL逻辑电平控制,用户可通过外部数字电路或单片微处理器的逻辑电平对电机的各种运动功能进行控制,可利用DA数模转换电路并配合8、9脚的转速信号对电机转速进行闭环控制. 控制逻辑时序如下:2.编码器输出信号的控制:*电路采用光电增量式编码器,用户可通过8、9、10、脚提供的编码器信号对电机的运动进行灵活控制,其中8、9脚为编码器的转动脉冲信号8为A相、9为B相,10脚为编码器零位信号。
*用户可通过信号接口8、9脚输出的编码器相序脉冲信号,利用单片微处理器对电机的运动位置、运转圈数、转向等数据进行判断和控制,从而实现电机运动精确灵活的控制*控制接口为遍排线插接接口,接口插针的排列见图所示:1—GND、2—Brake、3—Output Enable、4—Turning、5—Signal V ol(6.25V)、6—Rev Voltage Input、7—GND、8—Encoder CH-a、9—Encoder CH-b、10—Encoder CH-z *功能说明:1脚为电源地端。
2脚为刹车制动控制端,低电平为正常运转,高电平为制动刹车。
3脚为输出使能控制端,高电平使电机启动运转,低电平使电机停止。
4脚是转向控制端,通过逻辑电平改变转向。
5脚为控制电压输出端,输出电流不可大于20mA。
6脚为转速电压输入端,7脚为信号地,8脚编码器信号A相,9脚编码器信号B相,10脚编码器零位信号Z七、工作状态的设定 1.DIP开关的设定:1—ON内部转速控制 OFF外部转速控制 2—ON转向1 OFF转向2外部转向控制3—ON输出禁止(外部控制) OFF输出使能 4—ON运行 OFF刹车制动(外部控制) 2.转速的调整与设定*当采用电路内部转速设定时,应将DIP开关1置ON且外部控制接口6应与外部的转速设定电路完全断开,调整驱动器面板上的多圈电位器,使转速达到需要。
*当采用外部电路控制时,应将DIP开关1置OFF通过外部控制接口6输入转速设定电压0-6V,或通过外部电位器调整转速。
*外部转速调整电位器的连接:电位器的高端接控制接口5,中间滑动端接控制接口6,电位器的低端接控制接口7 GND端。
(电位器阻值为10K)八、编码器输入接口接线说明从面对右侧开始数1—GND、2—CH Z、3—CH A、4—CH B、5—CH2 Z、6—CH2 A、7--CH2 B、8—V ol(6.25V)九、注意事项1.禁止在高热潮湿的环境中使用。
2.远离酸碱等腐蚀性气体。
3.禁止在有导电粉尘的环境中使用。
4.请不要擅自打开控制器机壳,开壳后的控制器恕我们不负责维修。
电机驱动板直流电机驱动板步进电机驱动板可以直接驱动两路3-12V直流电机,并提供了5V输出接口,可以给5V电路系统供电下图为外接直流电机和电池盒电源接入图示直流电机,步进电机驱动模块。
支持2路直流电机驱动控制,4相步进电机控制。
L298N是专用驱动集成电路,属于H桥集成电路,与L293D的差别是其输出电流增大,功率增强。
其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,步进电机,减速电机,伺服电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。
当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。
本模块具有体积小,控制方便的特点。
采用此模块定会使您的电机控制自如,可以应对需要大功率步进电机的题目。
本模块可控制两相、三相、四相的电机。
使用说明:板上的ENA与ENB为高电平时有效,这里的电平指的是TTL电平。
ENA为A1和A2的使能端,ENB为B1和IB2的使能端。
BJ接步进电机公共端。
步进电机控制逻辑如下所示,其中A、B、C、D为步进电机的四个线圈,为1表示有电流通过,为0表示没有电流流过。
线圈连线图如下图所示(以四相步进电机为例)。
实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)产品参数:1.驱动芯片:L298N双H桥直流电机驱动芯片2.驱动部分端子供电范围Vs:+5V~+35V ;如需要板内取电,则供电范围Vs:+7V~+35V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围:低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围:低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃10.驱动板尺寸:48mm*43mm*33mm(带固定铜柱和散热片高度)11.驱动板重量:33g12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
使用说明:步进电机的驱动:板上的ENA与ENB为高电平时有效,这里的电平指的是TTL电平。
ENA为A1和A2的使能端,ENB为B1和IB2的使能端。
BJ接步进电机公共端。
步进电机控制逻辑如下所示,其中A、B、C、D为步进电机的四个线圈,为1表示有电流通过,为0表示没有电流流过。
线圈连线图如下图所示(以四相步进电机为例)。
产品参数:1.驱动芯片:L298N双H桥直流电机驱动芯片2.驱动部分端子供电范围Vs:+5V~+35V ;如需要板内取电,则供电范围Vs:+7V~+35V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围:低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围:低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃10.驱动板尺寸:55mm*49mm*33mm11.驱动板重量:33g12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
原理图参考:步进电机的驱动:板上的ENA与ENB为高电平时有效,这里的电平指的是TTL电平。
ENA为A1和A2的使能端,ENB为B1和IB2的使能端。
BJ接步进电机公共端。
步进电机控制逻辑如下所示,其中A、B、C、D为步进电机的四个线圈,为1表示高电平,为0表示低电平。
线圈连线图如下图所示(以四相步进电机为例)恒压恒流桥式2A驱动芯片L298N L298是SGS公司的产品,比较常见的是15脚Multiwatt封装的L298N,内部同样包含4通道逻辑驱动电路。
可以方便的驱动两个直流电机,或一个两相步进电机。
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7 V电压。
4脚VS接电源电压,VS电压范围VIH为+2.5~46 V。
输出电流可达2.5 A,可驱动电感性负载。
1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。
5,7,10,12脚接输入控制电平,控制电机的正反转。
EnA,EnB接控制使能端,控制电机的停转。
表1是L298N功能逻辑图。
In3,In4的逻辑图与表1相同。
由表1可知EnA为低电平时,输入电平对电机控制起作用,当EnA为高电平,输入电平为一高一低,电机正或反转。
同为低电平电机停止,同为高电平电机刹停。