M序列的产生
通信原理精品课-第七章m序列(伪随机序列)

04
m序列在扩频通信中的应用
扩频通信的基本原理和特点
扩频通信的基本原理
扩频通信是一种利用信息信号对一个很宽频带的载波进行调制,以扩展信号频谱 的技术。通过扩频,信号的频谱被扩展,从而提高了信号的抗干扰能力和隐蔽性 。
扩频通信的特点
扩频通信具有抗干扰能力强、抗多径干扰能力强、抗截获能力强、可实现码分多 址等优点。同时,扩频通信也存在一些缺点,如信号的隐蔽性和保密性可能受到 影响,信号的带宽较宽,对信道的要求较高。
在无线通信中,由于信号传播路径的不同,接收端可能接收到多个不同路径的信号,形成多径干 扰。
抗多径干扰
m序列具有良好的自相关和互相关特性,可以用于抗多径干扰。通过在发射端加入m序列,可以 在接收端利用相关器检测出原始信号,抑制多径干扰的影响。
扩频通信
m序列可以用于扩频通信中,将信息信号扩展到更宽的频带中,提高信号的抗干扰能力和隐蔽性 。
离散性
m序列是一种周期性信号,其 功率谱具有离散性,即只在某 些特定的频率分量上有能量分 布。
带宽有限
m序列的功率谱具有有限的带 宽,其带宽与序列的长度和多 项式的系数有关。
旁瓣抑制
m序列的功率谱具有较好的旁 瓣抑制特性,即除了主瓣外的 其他频率分量的能量较小。
m序列在多径干扰抑制中的应用
多径干扰
抗截获能力
m序列扩频通信系统具有较强 的抗截获能力。由于信号的频 谱被扩展,敌方难以检测和识 别信号,从而提高了通信的保 密性。
码分多址能力
m序列扩频通信系统具有较强 的码分多址能力。不同的用户 可以使用不同的扩频码进行通 信,从而实现多用户共享同一 通信信道。
05
m序列的未来发展与研究方向
m序列与其他通信技术的融合应用
m序列产生及其特性实验

湖南科技大学移动通信实验报告姓 名: 吴文建 学 号: 1208030104专业班级: 应用电子技术教育一班 实验名称: m 序列产生及其特性实验 实验目的: 掌握m 序列的特性、产生方法及其应用 实验仪器:1、pc 机一台 2、 实验原理:1、m 序列的产生 :m 序列是由带线性反馈的移存器产生的。
结构如图:a n-1a n-r...a n-3a n-2C 1C rC 3C 2...C 0输出输出为反馈移位寄存器的结构,其中an-i 为移位寄存器中每位寄存器的状态,Ci 为第i 位寄存器的反馈系数。
Ci =1表示有反馈,Ci =0表示无反馈。
一个线性反馈移位寄存器能否产生m 序列,取决于它的反馈系数Ci (例如上图的C3)。
对于m 序列,Ci 的取值必须按照一个本原多项式:∑==ni ii x C x f 0)(中的二进制系数来取值。
n 级移位寄存器可以产生的m 序列个数由下式决定:rN r )12(-Φ=其中φ(x )为欧拉函数,表示小于等于x 并与x 互质的正整数个数(包括1在内)。
表1-1-1列出了部分m 序列的反馈系数C i ,按照下表中的系数来构造移位寄存器,就能产生相应的m 序列。
表1-1-1 m序列的反馈系数表m序列的级数n m序列的周期P 反馈系数Ci(八机制)3 7 134 15 235 31 45,67,756 63 103,147,1557 127 203,211,217,235,277,313,325,345,3678 255 435,453,537,543,545,551,703,7479 511 1021,1055,1131,1157,1167,117510 1023 2011,2033,2157,2443,2745,327111 2047 4005,4445,5023,5263,6211,736312 4095 10123,11417,12515,13505,14127,1505313 8192 20033,23261,24633,30741,32535,3750514 16383 42103,51761,55753,60153,71147,6740115 32765 100003,110013,120265,133663,142305m序列的具有以下性质:(1)均衡性。
M序列的产生和性能分析
M序列的产生和性能分析本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.MarchM序列的产生和性能分析摘要在扩频函数中,伪随机信号不但要求具有尖锐的互相关函数,互相关函数应接近于零,而且具有足够长的码周期,以确保抗侦破、抗干扰的要求;由足够多的独立地址数,以实现码分多址的要求。
M序列是伪随机序列的一种,可由m序列添加全0状态而得到。
m序列与M序列对比得出在同级移位寄存器下M序列的数量远远大于m序列数量,其可供选择序列数多,在作跳频和加密码具有极强的抗侦破能力。
本文在matlab中的Simulink下用移位寄存器建立了4级、5级、6级M序列的仿真模型,进行了仿真,画出其时域图、频谱图、互相关性图。
通过时域图和频域图可看出,经过扩频后的信号频带明显的被扩展;由M 序列互相关性图,得出M序列有较小的互相关性,较强的自相关性,但相关性略差于m序列。
最后,本文又将M序列应用于CDMA扩频通信仿真系统中,得到下列结论:当使用与扩频时相同的M序列做解扩操作与用其他序列做解扩的输出有巨大的差别。
使用相同的序列进行解扩时系统输出值很大,而使用其他序列解扩时输出值在零附近变化。
这就是扩频通信的基础。
关键词:伪随机编码, 扩频通信自相关函数,互相关函数M SEQUENCE GENERATION AND PERFORMANCE ANALYSISABSTRACTIn spread-spectrum communication, pseudo-random sequence must have high autocorrelation value, low cross correlation, long code period and lots of dependent address to satisfy code division mul tipleaccess(CDMA). M sequence is one kind of the pseudo-random sequences. It can be may obtained through adding entire 0 states to m sequence. The number of M sequence is greater than the m-sequence under the same level shift register. It may supply the more choice. The M-sequence is often applied to the frequency hopping and adds the password to have greatly strengthened anti- solves the ability.At first, M sequences which has n=4、5、7 levels of shift registers are produced under Simulink of Matlab. The t ime domain chart, the spectrograph, the mutual correlation chart are plotted. Through the time domain chart and the spectrograph, we could see how the bandwidth of the information signal is expanded. The pseudo-random symbol speed rate higher noise signal frequency spectrum is proliferated widely, the output power spectrum scope is lower. This can explain the spread-spectrum communication system principle from the frequency range. Through the M sequence’s auto correlation chart we can see that the auto correlation of M-sequence is quite good but is inferior to the m sequence. Finally, the M sequence is applied to the code division multiple access (CDMA) communication system. This is the spread-spectrum communication foundation.KEY WORDS:Pseudo-random code, auto-correlation, cross-correlation目录前言 ......................................................... 错误!未定义书签。
m序列
a
12
游程数目
游程长 “1”
“0”
度/比特
xij
R(j)
1P Pi1
xi
xij
1, j 0 1, j 0
a
P
15
R()
R(j) 1 1
P
P
12 3
P
0
T0
j
当P足够大,收发同步时,接收端输出就是峰值.
a
16
➢ m序列的构造——反馈线性反馈移存器
an
c0 1 an1
c1
c2
an2
a1
.cn1 a0
.cn 1
输
特征多项式:Ci代表反馈连接的值,c0,cna19x4 来自1x. a 3
x2
a2
x3
a1
1 0 0 0
1
1
0
0
1 1 1 0
1
1
1
1
0 1 1 1
1
0
1
1
0 1
1 0
0 1
1 0
24 1 15
1
1
0
1
0 1 1 0
0
0
1
1
1
0
0
1
0
1
0
0
0
0
1
0
0
0
0
1
1
0
0
0
M序列的产生及特性分析实验

M 序列的产生及特性分析实验一:实验目的1、了解m 序列的特性及产生。
二:实验模块1、 主控单元模块2、 14号 CDMA 扩频模块3、示波器三:实验原理1、14号模块的框图14号模块框图2、14号模块框图说明(m 序列)127位128位该模块提供了四路速率为512K 的m 序列,测试点分别为PN1、PN2、PN3、PN4。
其中,PN2和PN4分别由PN 序列选择开关S2、S3控制;不同的开关码值,可以设置m 序列码元的不同偏移量。
开关S6是PN 序列长度设置开关,可选127位或128位,其中127位是PN 序列原始码长,128位是在原始码元的连6个0之后增加一个0得到。
Gold 序列测试点为G1和G2,其中G1由PN1和PN2合成,G2由PN3和PN4合成。
拨码开关S1和S4是分别设置W1和W2产生不同的Walsh 序列。
实验中还可以观察不同m 序列(或Gold 序列)和Walsh 序列的合成波形。
注意,每次设置拨码开关后,必须按复位键S7。
3、实验原理框图m 序列相关性实验框图为方便序列特性观察,本实验中将Walsh 序列码型设置开关S1和S4固定设置为某一种。
4、实验框图说明 m 序列的自相关函数为()R A D τ=-式中,A 为对应位码元相同的数目;D 为对应位码元不同的数目。
自相关系数为()A D A DP A Dρτ--==+ 对于m 序列,其码长为P=2n -1, 在这里P 也等于码序列中的码元数,即“0”和“1”个数的总和。
其中“0”的个数因为去掉移位寄存器的全“0”状态,所以A 值为121n A -=-“1”的个数(即不同位)D 为12n D -=m 序列的自相关系数为1 0()1 0,1,2,p τρτττ=⎧⎪=⎨-≠=⎪⎩…,p-1cT τm 序列的自相关函数四:实验步骤(注:实验过程中,凡是涉及到测试连线改变或者模块及仪器仪表的更换时,都需先停止运行仿真,待连线调整完后,再开启仿真进行后续调节测试。
m序列
m序列基本概念:M序列(即De Bruijn序列)又叫做伪随机序列、伪噪声(PN)码或伪随机码。
可以预先确定并且可以重复实现的序列称为确定序列;既不能预先确定又不能重复实现的序列称随机序列;不能预先确定但可以重复产生的序列称伪随机序列。
具体解释于一个n级反馈移位寄存器来说,最多可以有2^n 个状态,对于一个线性反馈移位寄存器来说,全“0”状态不会转入其他状态,所以线性移位寄存器的序列的最长周期为2^n-1。
当n级线性移位寄存器产生的序列{ai}的周期为T= 2^n-1时,称{ai}为n级m序列。
当反馈函数f(a1,a2,a3,…an)为非线性函数时,便构成非线性移位寄存器,其输出序列为非线性序列。
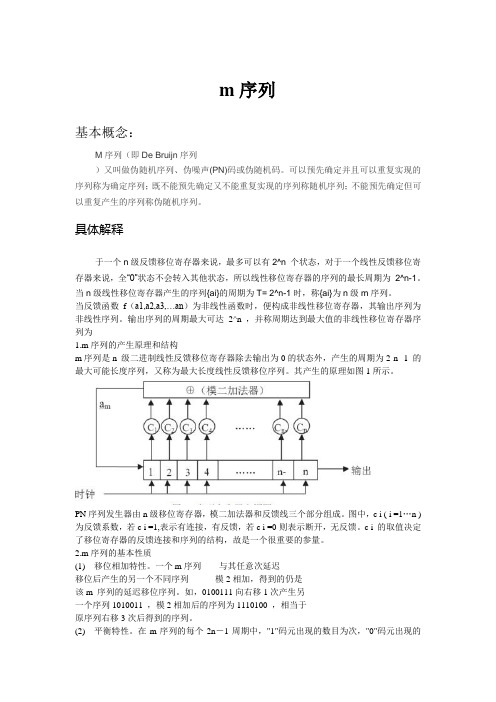
输出序列的周期最大可达2^n ,并称周期达到最大值的非线性移位寄存器序列为1.m序列的产生原理和结构m序列是n 级二进制线性反馈移位寄存器除去输出为0的状态外,产生的周期为2 n -1 的最大可能长度序列,又称为最大长度线性反馈移位序列。
其产生的原理如图1所示。
PN序列发生器由n级移位寄存器,模二加法器和反馈线三个部分组成。
图中,c i ( i =1…n ) 为反馈系数,若c i =1,表示有连接,有反馈,若c i =0则表示断开,无反馈。
c i 的取值决定了移位寄存器的反馈连接和序列的结构,故是一个很重要的参量。
2.m序列的基本性质(1) 移位相加特性。
一个m序列与其任意次延迟移位后产生的另一个不同序列模2相加,得到的仍是该m 序列的延迟移位序列。
如,0100111向右移1次产生另一个序列1010011 ,模2相加后的序列为1110100 ,相当于原序列右移3次后得到的序列。
(2) 平衡特性。
在m序列的每个2n-1周期中,"1"码元出现的数目为次,"0"码元出现的数目为2n -1-1 次,即"0"的个数总是比"1"的个数少一个,这表明,序列平均值很小。
m序列的原理及应用

m序列的原理及应用1. 什么是m序列?m序列,全名为最大长度线性反馈移位寄存器序列(Maximum Length Sequence),是一种特殊的二进制序列。
m序列的特点是具有最长的周期,并且波形均匀随机分布。
m序列可以通过一个线性反馈移位寄存器(LFSR)来生成。
2. m序列的生成原理m序列的生成原理基于线性反馈移位寄存器(LFSR)的运算。
LFSR是一种用于产生伪随机序列的硬件电路。
LFSR由寄存器和反馈函数组成。
寄存器是一组存储数据的单元,通常是一组触发器,每个触发器存储一个二进制位。
反馈函数根据寄存器的当前状态产生下一个状态。
反馈函数一般采用异或操作。
m序列的生成就是通过不断移位和反馈计算,使得LFSR的状态变化遍历所有可能的状态,从而生成了m序列。
3. m序列的应用m序列由于其随机性和均匀性,被广泛应用于通信、加密、导航等领域。
3.1 通信领域在通信领域中,m序列被用作伪随机序列发生器。
伪随机序列在信号传输、数据调制等方面起到关键作用。
m序列具有具有良好的互相关性和自相关性性质,能够提供伪随机的编码和解码功能。
3.2 加密领域m序列在加密领域中作为密钥序列广泛使用。
由于m序列的随机性和不可预测性,能有效地保护数据的安全性。
一种常见的应用是m序列与明文进行异或运算,生成密文,从而实现加密功能。
3.3 导航领域在导航领域中,m序列被用于全球卫星导航系统(GNSS)中的扩频码。
扩频码是通过将原始导航信号与m序列进行乘法运算而生成的。
m序列的均匀随机性使得扩频码具有良好的抗多径和抗干扰性能。
4. m序列的特点4.1 最长周期m序列具有最长的周期,周期长度为2^N-1,其中N为LFSR的位数。
这意味着m序列可以生成非常长的伪随机序列。
4.2 均匀随机性m序列的波形均匀分布,具有良好的随机性。
这个特性使得m序列在各个应用领域都能发挥重要作用。
4.3 线性可预测性m序列是由线性反馈移位寄存器生成的,其生成过程可以被完全预测。
(完整word版)实验九--m序列产生及其特性实验
实验九 m 序列产生及其特性实验一、实验目的通过本实验掌握m 序列的特性、产生方法及应用。
二、实验内容1、观察m 序列,识别其特征。
2、观察m 序列的自相关特性。
三、基本原理m 序列是有n 级线性移位寄存器产生的周期为21n -的码序列,是最长线性移位寄存器序列的简称。
码分多址系统主要采用两种长度的m 序列:一种是周期为1521-的m 序列,又称短PN 序列;另一种是周期为4221-的m 序列,又称为长PN 码序列。
m 序列主要有两个功能:①扩展调制信号的带宽到更大的传输带宽,即所谓的扩展频谱;②区分通过多址接入方式使用同一传输频带的不同用户的信号。
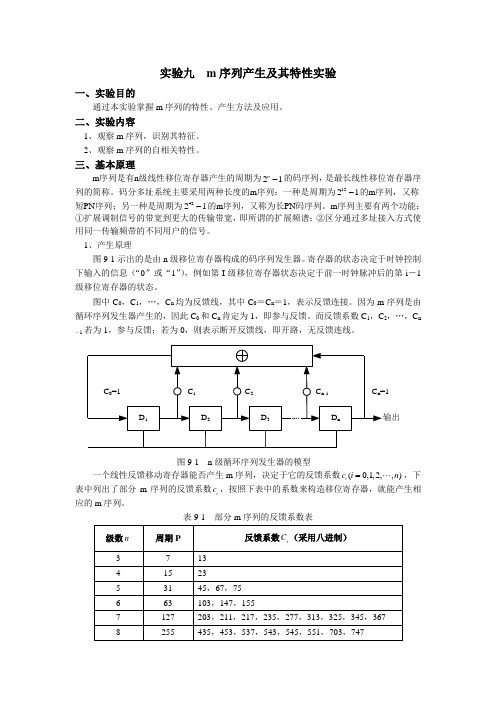
1、产生原理图9-1示出的是由n 级移位寄存器构成的码序列发生器。
寄存器的状态决定于时钟控制下输入的信息(“0”或“1”),例如第I 级移位寄存器状态决定于前一时钟脉冲后的第i -1级移位寄存器的状态。
图中C 0,C 1,…,C n 均为反馈线,其中C 0=C n =1,表示反馈连接。
因为m 序列是由循环序列发生器产生的,因此C 0和C n 肯定为1,即参与反馈。
而反馈系数C 1,C 2,…,C n-1若为1,参与反馈;若为0,则表示断开反馈线,即开路,无反馈连线。
图9-1 n 级循环序列发生器的模型一个线性反馈移动寄存器能否产生m 序列,决定于它的反馈系数(0,1,2,,)i c i n =,下表中列出了部分m 序列的反馈系数i c ,按照下表中的系数来构造移位寄存器,就能产生相应的m 序列。
表9-1 部分m 序列的反馈系数表根据表9-1中的八进制的反馈系数,可以确定m 序列发生器的结构。
以7级m 序列反馈系数8(211)i C =为例,首先将八进制的系数转化为二进制的系数即2(010001001)i C =,由此我们可以得到各级反馈系数分别为:01C =、10C =、30C =、41C =、50C =、60C =、71C =,由此就很容易地构造出相应的m 序列发生器。
m序列产生原理
m序列产生原理m序列是一种特殊的伪随机数序列,具有良好的随机性质,被广泛应用于通信、加密、雷达、测距等领域。
m序列的产生原理主要基于反馈移位寄存器和模2加法器,下面我们来详细介绍一下m序列的产生原理。
首先,m序列的产生基于一个反馈移位寄存器(LFSR),它由若干个触发器和异或门组成。
反馈移位寄存器的初始状态称为种子,种子的选择对m序列的随机性质有很大影响。
在产生m序列的过程中,寄存器的状态不断变化,每次变化都会输出一个比特,这些输出的比特组成了m序列。
其次,m序列的产生还依赖于模2加法器。
反馈移位寄存器输出的比特经过模2加法器进行模2加运算,得到m序列的输出比特。
模2加法器实际上就是异或门,它将反馈移位寄存器输出的比特与特定位置上的比特进行异或运算,得到m序列的下一个比特。
最后,m序列的周期性与反馈移位寄存器的长度有关。
对于一个n级的反馈移位寄存器,其产生的m序列的周期为2^n-1,即m序列会在2^n-1个时钟周期内重复。
这也意味着m序列的长度是有限的,随着时钟周期的增加,m序列会重复出现之前的序列。
总结一下,m序列的产生原理主要包括反馈移位寄存器和模2加法器。
反馈移位寄存器通过不断变换状态产生随机比特,而模2加法器则将这些比特进行模2加运算,最终输出m序列。
m序列的周期性与反馈移位寄存器的长度有关,周期为2^n-1。
通过合理选择反馈移位寄存器的种子和长度,可以得到具有良好随机性质的m序列。
以上就是m序列的产生原理,希望能对您有所帮助。
如果您对m序列还有其他疑问,欢迎与我们进一步交流讨论。
m序列产生原理
m序列产生原理m序列是一种随机序列,它的特点是在用相同的参数初始化m序列时,序列中出现的每一位都是确定的,而且具有高度的均匀性,被广泛用于计算机科学和信号处理领域。
m序列的产生主要是基于位移寄存器(shift-register)的运算,它们给出了一种快速、灵活的产生随机序列的方法。
m序列是典型的应用有状态机(state machine)的循环运算法则产生的。
有状态机指有一个由有限个状态组成的有限状态集合,它们可以根据输入信号从一个状态转换到另一个状态,并且每一次状态转换后,输出一位数据,而且这个数据受到了转换前的状态和输入信号的影响,我们称有状态机为有限状态机,它是一个循环的结构,在每一次的输出之后,系统会进入一个新的状态,这个状态是由输入信号和转换前的状态所决定的。
状态机的运算可以抽象地表述为如下的方程式:Si = f(Si-1, K)其中K为一个密钥,Si为状态机的状态,Si-1表示转换前的状态,f是一个函数,它使用一个密钥和转换前的状态作为输入,返回一个新的状态。
m序列生成器就是一种有状态机,它有一个状态序列Si,状态序列的长度称为m,它的状态序列Si的每一位都有一个可确定的值。
m 序列生成器的运算方程式如下:Si = f(Si-1, Si-2, Si-m+1)其中f是一个不同于上面式子中的函数。
它采用最后m位的状态作为输入,它根据某种规则,决定每一次状态转换后输出一个新的状态。
m序列生成器的输出都是独立的,且具有高度的均匀性,而且这种输出可以用来作为伪随机数据。
m序列生成器有很多种不同的实现形式,最常用的是有线m序列。
它使用一个有限的状态序列,以及一个叫做“线性函数”的运算,来生成特定的随机变量。
它的状态序列是由一系列的反馈有效比特组成的,这些反馈有效比特将决定最终输出序列的值,也就是状态序列将产生一组随机序列。
有线m序列的典型例子包括LFSR(线性反馈移位寄存器)、m暗号和BCH暗号,这些技术被广泛用于无线传输系统中,以生成高可靠性、高随机性的通信信号。
M序列原理及代码
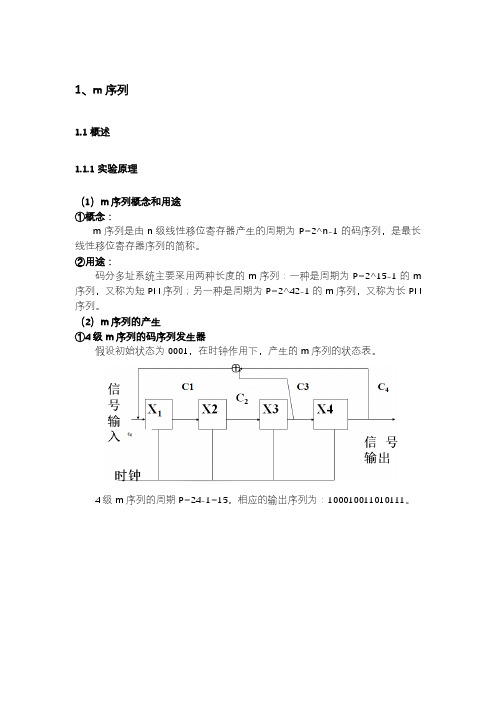
1、m序列1.1概述1.1.1实验原理(1)m序列概念和用途①概念:m序列是由n级线性移位寄存器产生的周期为P=2^n-1的码序列,是最长线性移位寄存器序列的简称。
②用途:码分多址系统主要采用两种长度的m序列:一种是周期为P=2^15-1的m 序列,又称为短PN序列;另一种是周期为P=2^42-1的m序列,又称为长PN 序列。
(2)m序列的产生①4级m序列的码序列发生器假设初始状态为0001,在时钟作用下,产生的m序列的状态表。
4级m序列的周期P=24-1=15,相应的输出序列为:100010011010111。
②线性移位反馈移位寄存器反馈系数Ci③m序列特性均衡性:在一个周期中,m序列中“1”的个数比“0”的个数多1个。
游程特性:长度为k的游程数占游程总数的1/2^k移位相加特性:一个m序列与其循环移位逐位比较,相同码的位数与不同码的位数相差1位。
自相关特性:表征一个信号与延迟后自身信号的相似性。
④m序列的构造——反馈线性反馈移存器1.1.2实验意义m序列是目前广泛应用的一种伪随机序列,在所有的伪随机序列中,m序列是最重要、最基本的一种伪随机序列。
它容易产生,规律性强,有很好的自相关性和较好的互相关特性。
m序列的生成是接下来的实验的基础,具有指导性的意义。
1.1.3系统的主要功能设计本原多项式系数为13、23、103、203的m序列。
1.1.4使用方法输入m后,输出相应的m序列。
1.2程序设计1.2.1设计思想由m序列的产生过程,即通过带反馈的移位寄存器产生,容易想到EDA中的结构化的程序设计思想,即以DFF触发器作为底层文件,进行顶层文件设计,获得m序列。
此设计的优点是程序思路简单,结构清晰,只要做出一种反馈系数的m序列,容易得到其他反馈系数的m序列;但也存在缺点,那就是结构化的设计使得代码写的过长。
1.2.2软件设计流程及描述(1)流程图(2)描述clk上升沿触发程序,用case语句选择m为13,23,103,203中的哪种情况。
m序列
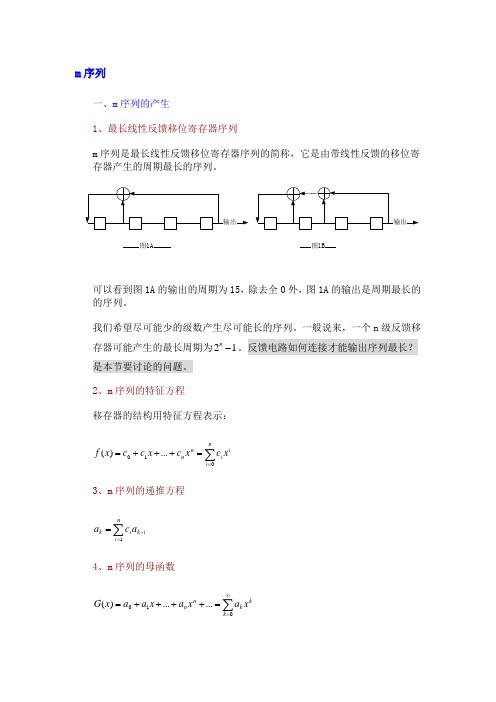
m 序列一、m 序列的产生1、最长线性反馈移位寄存器序列m 序列是最长线性反馈移位寄存器序列的简称,它是由带线性反馈的移位寄存器产生的周期最长的序列。
可以看到图1A 的输出的周期为15,除去全0外,图1A 的输出是周期最长的的序列。
我们希望尽可能少的级数产生尽可能长的序列。
一般说来,一个n 级反馈移存器可能产生的最长周期为12-n 。
反馈电路如何连接才能输出序列最长?是本节要讨论的问题。
2、m序列的特征方程移存器的结构用特征方程表示:∑==+++=ni i i nn x c x c x c c x f 010...)(3、m 序列的递推方程∑=-=ni ik i k a c a 14、m 序列的母函数∑∞==++++=010......)(k k k nn x a x a x a a x G5、几个有用的定理用来构造m 序列定理一、)()()(x h x G x f =,其中)(x h 为次数低于)(x f 的次数的多项式。
定理二、一n 级线性反馈移位寄存器的相继状态具有周期性,周期为12-≤n p 。
定理三、若序列}{k a A =具有最长周期12-=n p ,则其特征多项式)(x f 应为既约多项式。
定理四、一个线性移位寄存器的特征多项式)(x f 若为既约的,则由其产生的序列}{k a A =的周期等于使)(x f 能整除的)1(+p x 最小正整数p 。
6、本原多项式若一个n 次多项式满足如下条件:(1)、)(x f 是既约的(2)、)(x f 可整除m x +1,12-=n m(3)、)(x f 除不尽1+q x ,m q <则称)(x f 为本原多项式。
由本原多项式产生的序列一定是m 序列。
二、m 序列的性质1、均衡性在m 序列的一个周期中,“0”“1”的数目基本相等。
“1”比“0”多一个。
2、游程分布游程:序列中取值相同的那些相继的元素合称为一个“游程”。
游程长度:游程中元素的个数。
M序列的matlab产生方法
M序列是工程中常用的输入信号,它的性质类似于白噪声,而白噪声是理论上最好的输入信号,可见M序列的价值。
下面介绍M序列的matlab产生方法。
idinput函数产生系统辨识常用的典型信号。
格式u = idinput(N,type,band,levels)[u,freqs] = idinput(N,'sine',band,levels,sinedata)N产生的序列的长度,如果N=[N nu],则nu为输入的通道数,如果N=[P nu M],则nu指定通道数,P为周期,M*P为信号长度。
默认情况下,nu=1,M=1,即一个通道,一个周期。
Type指定产生信号的类型,可选类型如下Band指定信号的频率成分。
对于’rgs’、’rbs’、’sine’,band = [wlow, whigh]指定通带的范围,如果是白噪声信号,则band=[0, 1],这也是默认值。
指定非默认值时,相当于有色噪声。
对于’prbs’,band=[0, B],B表示信号在一个间隔1/B(时钟周期)内为恒值,默认为[0, 1]。
Levels指定输入的水平。
Levels=[minu, maxu],在type=’rbs’、’prbs’、’sine’时,表示信号u的值总是在minu和maxu之间。
对于type=’rgs’,minu指定信号的均值减标准差,maxu指定信号的均值加标准差,对于0均值、标准差为1的高斯白噪声信号,则levels=[-1, 1],这也是默认值。
说明对于PRBS信号,如果M>1,则序列的长度和PRBS周期会做调整,使PRBS的周期为对应一定阶数的最大值(即2^n-1,n为阶数);如果M=1,PRBS的周期是大于N 的相应阶数的值。
在多输入的情形时,信号被最大平移,即P/nu为此信号能被估计的模型阶次的上界。
上面的意思可如下理解:对于M=1时,ms = idinput(12, 'prbs', [0 1], [0 1]);figurestairs(ms)title('M序列')ylim([-0.5 1.5])结果如下同时,matlab给出如下警告Warning: The PRBS signal delivered is the 12 first values of a full sequence of length 15.即函数的输出为周期为15(大于12的第一个2^n-1的值)PRBS信号的前12个值组成的序列。
pn码,m序列产生原理
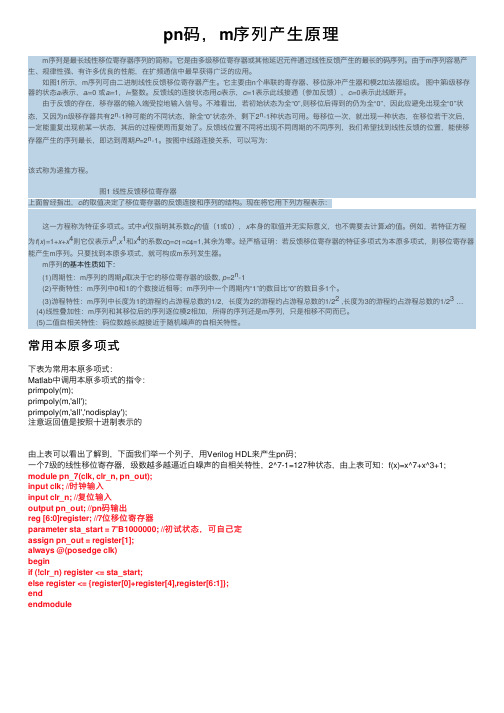
pn码,m序列产⽣原理m序列是最长线性移位寄存器序列的简称。
它是由多级移位寄存器或其他延迟元件通过线性反馈产⽣的最长的码序列。
由于m序列容易产⽣、规律性强、有许多优良的性能,在扩频通信中最早获得⼴泛的应⽤。
如图1所⽰,m序列可由⼆进制线性反馈移位寄存器产⽣。
它主要由n个串联的寄存器、移位脉冲产⽣器和模2加法器组成。
图中第i级移存器的状态a i表⽰,a i=0 或a i=1,i=整数。
反馈线的连接状态⽤c i表⽰,c i=1表⽰此线接通(参加反馈),c i=0表⽰此线断开。
由于反馈的存在,移存器的输⼊端受控地输⼊信号。
不难看出,若初始状态为全“0”,则移位后得到的仍为全“0”,因此应避免出现全“0”状态,⼜因为n级移存器共有2n-1种可能的不同状态,除全“0”状态外,剩下2n-1种状态可⽤。
每移位⼀次,就出现⼀种状态,在移位若⼲次后,⼀定能重复出现前某⼀状态,其后的过程便周⽽复始了。
反馈线位置不同将出现不同周期的不同序列,我们希望找到线性反馈的位置,能使移存器产⽣的序列最长,即达到周期P=2n-1。
按图中线路连接关系,可以写为:该式称为递推⽅程。
图1 线性反馈移位寄存器上⾯曾经指出,c i的取值决定了移位寄存器的反馈连接和序列的结构。
现在将它⽤下列⽅程表⽰:这⼀⽅程称为特征多项式。
式中x i仅指明其系数c i的值(1或0),x本⾝的取值并⽆实际意义,也不需要去计算x的值。
例如,若特征⽅程为f(x)=1+x+x4则它仅表⽰x0,x1和x4的系数c0=c1=c4=1,其余为零。
经严格证明:若反馈移位寄存器的特征多项式为本原多项式,则移位寄存器能产⽣m序列。
只要找到本原多项式,就可构成m系列发⽣器。
m序列的基本性质如下:(1)周期性:m序列的周期p取决于它的移位寄存器的级数, p=2n-1(2)平衡特性:m序列中0和1的个数接近相等;m序列中⼀个周期内“1”的数⽬⽐“0”的数⽬多1个。
(3)游程特性:m序列中长度为1的游程约占游程总数的1/2,长度为2的游程约占游程总数的1/22 ,长度为3的游程约占游程总数的1/23 …(4)线性叠加性:m序列和其移位后的序列逐位模2相加,所得的序列还是m序列,只是相移不同⽽已。
m序列
④自相关特性:表征一个信号与延迟后自 身信号的相似性 。
R ( j)
R ( j) 1 P
P
x P
i 1
1
P
i
xi j
1, j 0 1 , j 0 P
xi xi
j
i 1
R ( )
R( j) 1
1
P
0
P
1 2 3
P
T0
j
当P足够大,收发同步时,接收端输出就是峰值.
i i0
n
本原多项式 p 1、f ( x ) 为 x
1
的一个因子,
p 2 1
n
例10-1 构造一个4级移存器的m序列. n=4, n 周期 p 2 1
=15
X15+1=(X4+X+1)(X4+X3+1)(X4+X3+X 2+X+1)(X2+X+1)(X+1)
x
4
x 1
a3
0
1
1
0
1
1
1
4级m序列的周期P=24-1=15,相应的输出 序列为:100010011010111。
一个线性移位反馈移位寄存器能否产生m序列,决 定于它的反馈系数Ci(i=0,1,2……,n)。
M序列 M序列 的级数 的周期 n P=2n-1 M序列 反馈系数Ci(采用八进制) 的数目
3 4 5 6 7
1、均衡性 2、游程特性 3、移位相加特性 4、自相关特性
①均衡性 在一个周期中,m序列中“1”的个数比 “0”的个数多1个。N级移位寄存器有2n状 态,这些状态对应的二进制有一半为偶数 (即末位数为0),另一半为奇数(即末位数为 1)。m序列一个周期历经2n-1个状态,少一 个全0状态(属于偶数状态),因此在一个周 期中“1”的个数比“0”的个数多1个。
m序列的原理

m序列的原理
M序列(Maximum Length Sequence)是一种伪随机序列生成
方法,也称为伪随机二进制序列。
它具有自相关性和互相关性很小的特点,并且具有最长周期。
M序列的生成原理基于反馈移位寄存器(Feedback Shift Register,FSR)。
FSR是由多个D触发器(D Flip-Flop)组
成的,每个D触发器的输出作为下一个D触发器的输入,并
形成移位链。
M序列的开始状态可以是任意的,并通过逻辑运算(如异或
运算)将连续的寄存器输出进行组合,生成伪随机序列。
M
序列的周期取决于FSR的长度,理论上可以达到2的n次方-1,其中n为FSR的长度。
生成M序列的特点如下:
1. 周期最长:当FSR的长度为n时,M序列的周期为2的n
次方-1。
2. 互相关性和自相关性较小:M序列具有较小的相互相关性
和自相关性,适合用于通信系统中的扩频技术。
3. 均匀性:M序列的值为+1或-1,每个值出现的概率相等,
具有较好的均匀性。
4. 硬件实现简单:使用FSR和逻辑运算可以很容易地生成M
序列,不需要复杂的计算。
M序列在通信系统中的应用广泛,主要用于扩频通信中的伪
随机序列生成、同步检测以及信号捕获等方面。
m序列产生
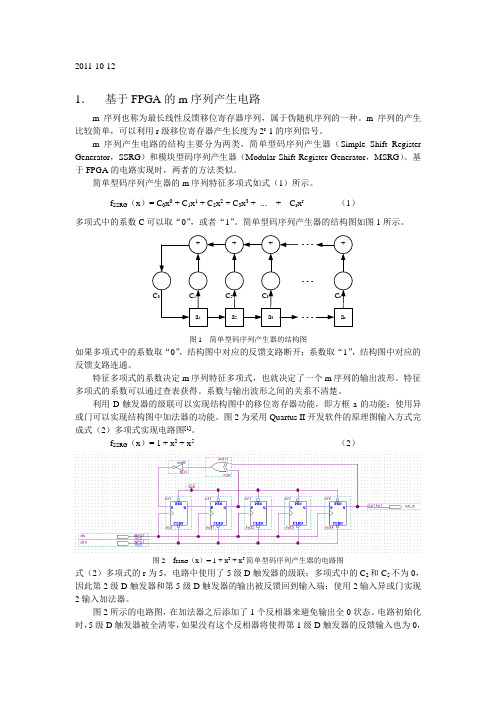
2011-10-121. 基于FPGA 的m 序列产生电路m 序列也称为最长线性反馈移位寄存器序列,属于伪随机序列的一种。
m 序列的产生比较简单,可以利用r 级移位寄存器产生长度为2r -1的序列信号。
m 序列产生电路的结构主要分为两类,简单型码序列产生器(Simple Shift Register Generator ,SSRG )和模块型码序列产生器(Modular Shift Register Generator ,MSRG )。
基于FPGA 的电路实现时,两者的方法类似。
简单型码序列产生器的m 序列特征多项式如式(1)所示。
f SSRG (x )= C 0x 0 + C 1x 1 + C 2x 2 + C 3x 3 + … + C r x r (1) 多项式中的系数C 可以取“0”,或者“1”。
简单型码序列产生器的结构图如图1所示。
图1 简单型码序列产生器的结构图如果多项式中的系数取“0”,结构图中对应的反馈支路断开;系数取“1”,结构图中对应的反馈支路连通。
特征多项式的系数决定m 序列特征多项式,也就决定了一个m 序列的输出波形。
特征多项式的系数可以通过查表获得。
系数与输出波形之间的关系不清楚。
利用D 触发器的级联可以实现结构图中的移位寄存器功能,即方框a 的功能;使用异或门可以实现结构图中加法器的功能。
图2为采用Quartus II 开发软件的原理图输入方式完成式(2)多项式实现电路图[1]。
f SSRG (x )= 1 + x 2 + x 5 (2)图2 f SSRG (x )= 1 + x 2+ x 5简单型码序列产生器的电路图式(2)多项式的r 为5,电路中使用了5级D 触发器的级联;多项式中的C 2和C 5不为0,因此第2级D 触发器和第5级D 触发器的输出被反馈回到输入端;使用2输入异或门实现2输入加法器。
图2所示的电路图,在加法器之后添加了1个反相器来避免输出全0状态。
m序列的原理及应用总结
m序列的原理及应用总结1. 概述m序列(maximum-length sequence),也称为伪随机噪声序列或m序列码,是一种特殊的二进制序列。
m序列具有良好的随机性和周期性,具有广泛的应用领域,例如通信系统中的扩频技术、密码学中的序列密码以及信号处理中的相关分析等。
本文将介绍m序列的原理和应用。
2. m序列的生成原理m序列是通过线性移位寄存器(LSR)和反馈逻辑实现的。
下面是m序列的生成原理:1.首先,选择一个m阶多项式,表示为G(x)=g0+g1x+g2x2+…+gm-1xm-1,其中gi ∈ {0, 1},且m大于1。
2.初始化一个m位寄存器,将其所有位都设置为1。
3.对于每个时钟周期,将寄存器的最低位输出作为m序列的输出,并根据反馈逻辑更新寄存器的状态。
4.反馈逻辑根据G(x)的系数进行计算,具体计算方式为将寄存器的值与G(x)的系数进行与运算,然后将结果进行异或操作,并将计算结果作为寄存器的新状态。
5.重复步骤3和步骤4,直到生成所需的m序列。
3. m序列的特性m序列具有以下几个特性:•最大长度:m序列的周期长度为2m-1,即n=2m-1。
•等自相关性:m序列与其自身进行互相关时,对于任意的偏移量k (0≤k≤n-1),互相关系数均为0。
•平衡性:m序列的周期内0和1的个数相等,即0和1出现的次数相差不超过1。
•异构性:m序列的任意m位子序列都是一个伪随机序列。
4. m序列的应用m序列具有良好的性质,因此在许多领域都有重要的应用。
以下是m序列的几个主要应用:4.1 扩频技术扩频技术是将原始数据序列通过与m序列进行逐位异或得到扩频序列的技术。
扩频序列具有较大的频带宽度,在通信系统中广泛应用于抗干扰、低功率传输以及多用户接入等方面。
m序列被广泛应用于扩频码的产生。
4.2 序列密码系统m序列在密码学中有重要的应用,可以用于产生密钥序列。
由于m序列具有较长的周期和良好的随机性质,能够提供较高的安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M 序列的产生
1. 对象或参数
数学模型如下:
)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+--
其中,)(k v 是白噪声N (0,1)(服从正态分布),输入信号采用4阶M 序列,幅度为1. 辨识模型如下:
)()2()1()2()1()(2121k v k u b k b k z a k z a k z +-+-=-+--
设输入信号的取值为k=1到k=16的M 序列,则待辨识参数L L L L LS z H H H ττθ1-)(=
∧。
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=∧4321a a a a LS θ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)16(...)4()3(z z z z L ⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡---=)14()15()14()15(......)2()3(z(2)-)3(-)1()2()1()2(-u u z z u u z u u z z H L 编制仿真程序,,获取输入输出数据,运用最小二乘法对系统的参数进行辨识,并将辨识结果与实际参数进行对比。
2. 程序框图
3. 程序实现
function [] = JM-232()
%--------------------------------------------------------实验题目及初始化定义
disp('最小二乘法的实现')
disp(' ')
disp('数学模型为:z(k)-1.5z(k-1)+0.7z(k-2)=u(k-1)+0.5u(k-2)+v(k).')
disp(' 所选择的辨识模型为:z(k)+a1*z(k-1)+a2*z(k-2)=b1*u(k-1)+b2*u(k-2)+v(k).') disp(' 故实际参数a1=-1.5, a2=0.7, b1=1, b2=0.5. ')
disp(' ')
disp('系统输入采用4 阶M 序列且其幅度为1,输出受到白噪声序列v(k)干扰.') ds = input(' 假设白噪声序列v(k)服从正态分布,均值为0,请输入方差ds = '); disp(' ')
disp(' ')
a0=65539;M=2147483647;x=123456;b=10000;
U=[];V=[];Z=[];T=[];
P=zeros(20,4);H=zeros(14,4);LS=zeros(4,1);ZL=zeros(14,1);
%------------------------------------------------产生4 阶M 序列作为输入信号u(k)
fori=1:4
P(1,i)=1;
U(1)=-2*(P(1,4)-0.5);
end
for j=2:16
fori=2:4
P(j,i)=P(j-1,i-1);
end
P(j,1)=mod(P(j-1,3)+P(j-1,4),2);
U(j)=-2*(P(j,4)-0.5);
end
disp('** 通过仿真获得:')
disp(' ')
disp(' 系统输入u(k)取k=1 到k=16 图形如figure 1 所示;')
disp(' ')
figure(1)
plot(U);hold on
axis([0 17 -1.5 1.5])
title('系统输入u(k)图形')
%--------------------------------------------------产生白噪声作为干扰信号v(k)
fori=1:192
x=mod(a0*x+b,M);
T(i)=x/M;
end
aT=mean(T);vT=var(T);
fori=1:16
tempsum=0;
for j=1:12
tempsum=tempsum+T(12*i-j+1);
end
V(i)=sqrt(ds)*(tempsum-12*aT)/sqrt(12*vT);
end
aV=mean(V);vV=var(V);
disp(' 系统白噪声干扰v(k)取k=1 到k=16 图形如figure 2 所示;') disp([' 该系统白噪声v(k)均值为' num2str(aV)])
disp([' 方差为' num2str(vV)])
disp(' ')
figure(2)
plot(V);hold on
axis([0 17 -3 3])
title('系统白噪声v(k)图形')
%--------------------------------计算输出z(k),同时由系统输出构成观测矩阵ZL 与H
Z(1)=0;Z(2)=0;
for k=3:16
Z(k)=1.5*Z(k-1)-0.7*Z(k-2)+U(k-1)+0.5*U(k-2)+V(k);
ZL(k-2,1)=Z(k);
end
fori=1:14
H(i,1)=-Z(i+1);H(i,2)=-Z(i);H(i,3)=U(i+1);H(i,4)=U(i);
end
disp(' 系统输出z(k)图形如figure 3 所示;')
disp(' ')
figure(3)
plot(Z)
title('系统输出z(k)图形')
%---------------------------------------------------------最小二乘法参数辨识
LS=inv(H'*H)*H'*ZL;
disp(' 运用最小二乘法对这一系统参数进行辨识,计算得到:')
disp([' a1(实际值) = -1.5,a1(辨识值)= ' num2str(LS(1,1))])
disp([' a2(实际值) = 0.7,a2(辨识值)= ' num2str(LS(2,1))])
disp([' b1(实际值) = 1,b1(辨识值)= ' num2str(LS(3,1))])
disp([' b2(实际值) = 0.5,b2(辨识值)= ' num2str(LS(4,1))])
disp(' ')
end
4. 仿真结果
本系统输入采用4 阶M 序列且其幅度为1,选取k=1 到k=16 数据,如图1所示系统输入图形。
图1 系统输入图形
输出受到白噪声序列v(k)污染,已知白噪声序列v(k)服从正态分布,均值为0,ds=2的白噪声序列图形如图2所示。
通过仿真,得到系统输出z(k)如图3所示。
图2系统白噪声图形(ds=2)图3 系统输出图形(ds=2)
运用最小二乘法对系统参数进行辨识,得到如图4所示的辨识结果。
图4 辨识结果截图(ds=2)
ds=1的白噪声序列图形如图5所示。
通过仿真,得到系统输出z(k)如图6所示。
图5系统白噪声图形(ds=1)图6 系统输出图形(ds=1)
图7 辨识结果截图(ds=1)
ds=1的白噪声序列图形如图8所示。
通过仿真,得到系统输出z(k)如图9所示。
图8 系统白噪声图形(ds=0)图9 系统输出图形(ds=0)
图10 辨识结果截图(ds=0)
5.结论
在研究系统辨识问题时,将把待辨识的系统看做“黑箱”,只考虑系统的输入输出特性,而不强调系统的内部机理。
本文即采用最小二乘法根据系统输入与输出特性对系统参数进行辨识,得到的辨识结果与实际值接近。
从ds=2和ds=1的辨识结果来看,a1、a2吻合的较好,b1、b2的误差较大。
选取白噪声序列方差ds=0,再次仿真得到如图10所示的辨识结果。
不难发现,当方差ds=0时,即没有系统白噪声干扰时,系统辨识参数与实际参数完全一致,进而可得系统辨识的效果与系统噪声有关。
噪声对参数估计有影响,噪声方差增大,估计值的偏差也增大。